


خلاصه
در نتیجه افزایش نگرانی های ایمنی، نظارت دوربین به طور گسترده ای به عنوان راهی برای نظارت بر فضاهای عمومی مورد استفاده قرار گرفته است. یکی از چالش های اصلی نظارت دوربین طراحی یک روش بهینه برای قرار دادن شبکه دوربین به منظور اطمینان از پوشش بیشتر ممکن است. علاوه بر این، این روش باید چشم انداز محیط تحت نظارت را در نظر بگیرد تا اشیاء موجود را که ممکن است بر استقرار چنین شبکه ای تأثیر بگذارد، در نظر بگیرد. در این مقاله، یک رویکرد جدید مبتنی بر Voronoi مبتنی بر GIS سه بعدی به نام “HybVOR” برای قرار دادن شبکه دوربین های نظارتی پیشنهاد شده است. هدف رویکرد “HybVOR” دستیابی به پوششی نزدیک به 100٪ از طریق سه فاز اصلی است. ابتدا یک نمودار Voronoi از ردپای ساختمان ها تولید می شود و دوربین ها روی لبه های Voronoi قرار می گیرند. دومین، سطح پوشش با محاسبه یک دیدگاه بر اساس یک مدل سطح دیجیتال شطرنجی منطقه مورد نظر ارزیابی می شود. در نهایت، دید ورودی های ساختمان های اصلی بر اساس یک مدل برداری سه بعدی که شامل این ویژگی ها است، ارزیابی می شود. اثربخشی رویکرد “HybVOR” از طریق یک مطالعه موردی نشان داده شده است که با منطقه مورد علاقه در بندر دریایی جده در پادشاهی عربستان سعودی مطابقت دارد.
کلید واژه ها:
قرار دادن دوربین نظارتی ; نمودار ورونوی ; پوشش ؛ GIS سه بعدی ؛ تحلیل دیدگاه
1. معرفی
تقاضا برای فناوری های امنیتی و نظارتی اخیراً پدیدار شده است. این نوع فناوری راهکارهای بالقوه ای را برای پیشگیری و کاهش جرایم و تخلفات ارائه می دهد. با این تقاضای قابل توجه، استفاده از شبکه های نظارت دوربین افزایش یافته است. در واقع دوربین یا نظارت تصویری به عنوان یک سیستم قدرتمند مورد استفاده در حفظ نظم و امنیت در فضاهای عمومی (مانند زیرساخت های حمل و نقل، بندر دریایی، فرودگاه، پارک ها، فروشگاه ها و غیره ) در نظر گرفته می شود. بر این اساس لازم است روش های مناسب و بهینه ای که بهترین مکان نظارت دوربین ها را مشخص می کند، تعریف شود.
در واقع، قرار دادن دوربین تاثیر زیادی بر کیفیت و کارایی نظارت دارد. قرارگیری مناسب مربوط به ویژگی های دوربین مانند؛ محدوده، میدان دید، وضوح، هزینه استفاده، نوع دوربین (نور مرئی، مادون قرمز…) و غیره. با این حال، مهمترین عامل محیطی است که در آن قرارگیری انجام خواهد شد. در واقع، اثربخشی سیستم نظارت تصویری به شدت به محل فیزیکی دوربین ها بستگی دارد [ 1 ].
بنادر دریایی از جمله مهم ترین مکان هایی هستند که امنیت در آن ها دغدغه اصلی است. در واقع یکی از ضروری ترین امکانات برای فعالیت های تجاری و گردشگری به ویژه برای کشورهای ساحلی است. آنها نقش عمده ای در توزیع کالاها در سراسر جهان ایفا می کنند زیرا تقریبا 90٪ از این کالاها از طریق بندر دریایی حمل می شوند [ 2 ]. از این رو، در دهه های اخیر، نیاز به بهبود امنیت بنادر دریایی به منظور امکان حمل و نقل ایمن و کارآمد افراد و کالاها از طریق این مراکز ترانزیتی رو به افزایش است .]. به طور کلی، مسائل اصلی مربوط به امنیت بندر دریایی را می توان به عنوان امنیت محیطی، امنیت داخلی و کنترل های عملیاتی، امنیت دریایی، سیستم های جامعه بندری، سیستم های پشتیبانی تصمیم، مدیریت پیشگیری و اضطراری و غیره طبقه بندی کرد. [ 4 ]. برای مقابله با این مسائل، بسیاری از فناوریهای مفید مانند نظارت تصویری، رادار و سونار، سیستمهای غربالگری محموله/کانتینر، سیستمهای امنیتی محیطی، اطلاعرسانی انبوه، سیستمهای بیسیم [ 3 ] وجود دارد. به گفته همین مرجع، نظارت تصویری رایج ترین فناوری مورد استفاده برای امنیت پورت است. از طریق روشهای تحلیلی، میتوان اطلاعات بسیار مفیدی از ویدیوهای بهدستآمده مانند نفوذ محیطی، دنبال کردن موضوع مورد علاقه و طبقهبندی اشیا را استخراج کرد.3 ]. با این حال، پیچیدگی چشم انداز فیزیکی می تواند انجام وظایف نظارت بر بنادر دریایی را بسیار سخت کند [ 3 ].
در این مقاله، یک رویکرد جدید GIS گرا به نام HybVOR (Hyb: Hybrid، VOR: Voronoi) پیشنهاد شده است. هدف آن یافتن مکان بهینه دوربین های نظارتی است. هدف اصلی رسیدن به پوشش نزدیک به 100٪ با حداقل تعداد دوربین است. رویکرد پیشنهادی مبتنی بر ترکیبی از موارد زیر است: (1) مدلسازی سه بعدی و تحلیل چشمانداز فیزیکی بندر دریایی و (2) رویکرد Voronoi برای تقسیمبندی فضا. تقسیم بندی فضا بر اساس نمودار Voronoi به ما امکان می دهد تعداد و مکان دوربین ها را برای پوشش بهینه مشخص کنیم. علاوه بر این، تجزیه و تحلیل مدل سه بعدی بندر بر اساس ترکیبی از تحلیل بردار رستر و سه بعدی ارائه شده توسط نرم افزار GIS است، از این رو، قسمت “Hyb” (از Hybrid) نام HybVOR است.
ساختار این مقاله به شرح زیر است: بخش اول مروری بر ادبیات قرارگیری دوربین های نظارتی، اصول نمودار ورونوی و محاسبه پوشش است. بخش دوم به اصول رویکرد HybVOR اختصاص دارد. این بخش نشان می دهد که چرا و چگونه این رویکرد پیشنهادی تجزیه و تحلیل سه بعدی شطرنجی و برداری را با نمودارهای ورونوی ترکیب می کند. در مرحله بعد، یک مطالعه موردی که مربوط به اجرای رویکرد HybVOR در بندر دریایی جده است، معرفی میشود. پس از آن، بحث در مورد نتایج این مطالعه موردی ارائه شده است. در نهایت، بخش آخر این اثر را به پایان میرساند و برخی از دیدگاههای مهم و کارهای آینده را برجسته میکند.
2. آثار مرتبط
قرار دادن سنسور به طور کلی، و به ویژه دوربین ها، موضوعی تحقیقاتی است که مورد توجه چندین گروه تحقیقاتی در سراسر جهان قرار گرفته است. هدف اصلی از قرار دادن دوربین، تعریف موقعیت های دیدگاه به منظور انتخاب آموزنده ترین نماها از یک صحنه مورد علاقه است [ 5 ]. قرارگیری دوربین به مسائل مختلفی مانند نظارت، ردیابی و نظارت بر صحنه [ 6 ]، بازرسی بخشی [ 4 ]، بازسازی سه بعدی و حسگر روباتیک ([ 1 ، 7 ]) و مشکل گالری هنری [ 8 ] مربوط می شود.
بصری ترین روش برای قرار دادن دوربین، قرار دادن یکنواخت شبکه دوربین در منطقه مورد نظر است. این روش ممکن است نتایج بسیار جالبی را برای یک منطقه غیر پیچیده که تنها مشکل آن به حداکثر رساندن پوشش است، ارائه دهد. با این حال، در بیشتر موارد، مشکل بسیار پیچیده تر و دشوارتر است. در واقع، با توجه به هدف سیستم، موضوع قرارگیری دوربین ممکن است از منظرهای مختلفی مورد بررسی قرار گیرد. بر این اساس، رویکردهای قرار دادن دوربین ارائه شده در ادبیات علمی را می توان به دو دسته اصلی طبقه بندی کرد: (1) رویکردهای مبتنی بر هدف و (2) رویکردهای مبتنی بر منظر.
2.1. رویکردهای مبتنی بر هدف
رویکردهای مبتنی بر هدف تمایل دارند قرار دادن دوربین ها را بر اساس هدف مورد علاقه پیدا کنند. هدف می تواند یک شی، یک رویداد یا یک پدیده باشد که ممکن است در فضا و زمان تکامل یابد. رویکردهای مبتنی بر هدف بهجای تمرکز بر سطح پوشش، عمدتاً بر ماهیت هدف تمرکز میکنند [ 6 ].
در [ 7 ]، نویسندگان روشی را برای قرار دادن حسگر خودکار بر اساس فایل داده های CAD 3D پیشنهاد می کنند. هدف از این روش یافتن بهترین موقعیت دید یک حسگر بینایی با پارامترهای مناسب مانند موقعیت، جهت و تنظیم نوری است. علاوه بر این، هر دیدگاه باید برخی از محدودیتهای از پیش تعریفشده را برآورده کند که عمدتاً به خواص فیزیکی و نوری حسگر مربوط میشود. این رویکرد برای زمینه دید ربات مبتنی بر مدل توسعه داده شد. هدف اصلی حرکت یک حسگر (با استفاده از یک ربات) از یک موقعیت به موقعیت دیگر در اطراف جسم برای نظارت و تجزیه و تحلیل ویژگی های مهمی است که هدف مورد مطالعه را مشخص می کند. به همین ترتیب، کارهای مشابه دیگری نیز در رابطه با بازسازی سه بعدی اشیا و فضا وجود دارد، مانند [ 9 ،10 ، 11 ] و غیره .
در [ 6 ]، نویسندگان یک فرمول تحلیلی را برای نظارت بر مسیرهای حرکت لوکوموتیو که توسط افراد طی یک صحنه مورد علاقه طی میشود، معرفی میکنند. این روش بر به حداکثر رساندن قابلیت مشاهده هدف و گرفتن حرکت آن تمرکز دارد. نویسندگان تصریح میکنند که رویکرد آنها فقط به مجموعهای حداقلی از دانش پیشینی در مورد هدف نیاز دارد و هیچ دانش پیشینی در مورد چشمانداز فیزیکی که رویداد در آن رخ میدهد.
بر اساس نتایج مقاله [ 1 ، 6 ] راه حلی ایجاد کرده اند که دوربین های ثابت و متحرک را ترکیب می کند تا محل قرارگیری یک شبکه دوربین نظارتی را تعریف کند. نویسندگان پیشنهاد می کنند از دوربین های ثابت برای مشاهده کل صحنه به منظور استخراج حرکت اهداف (افراد در این مورد) استفاده شود. سپس این دانش بهدستآمده برای تعیین محل قرارگیری دوربینهای موبایل بر اساس معیارهای کیفی که عبارتند از: کوتاهشدن، پوشش زمین و وضوح مورد استفاده قرار میگیرد.
2.2. رویکردهای مبتنی بر منظره
روشهای مبتنی بر چشمانداز فرض میکنند که ویژگیهای فیزیکی محیط، جایی که قرارگیری دوربینها در آن انجام میشود، از قبل شناخته شده است. هدف این خانواده از روش ها بهینه سازی منطقه پوشش است. تعریف پوشش از یک دامنه به دامنه دیگر متغیر است [ 12 ]. یک تعریف کلی از پوشش توسط [ 13 ] به عنوان کیفیت نظارت ارائه شده است که می تواند توسط یک شبکه حسگر ارائه شود و یک منطقه مورد علاقه چقدر نظارت می شود.
یکی از موضوعاتی که به خوبی مطالعه شده در رابطه با رویکردهای مبتنی بر منظره، مسئله گالری هنری [ 14 ] است. در نظر دارد تعداد ناظران (به عنوان مثال دوربین) را برای نظارت بر هر نقطه در داخل یک ناحیه چند ضلعی (اتاق گالری هنری) تعیین کند. به عبارت دیگر، این مسئله سعی می کند تعداد و مکان بهینه ناظران را در داخل چشم انداز پیدا کند تا پوشش مورد نظر را برآورده کند یا پوشش را به حداکثر برساند ([ 8 ، 15 ]).
در همین راستا، محققان دیگر بسیاری از روشهای بهینهسازی گسسته را برای قرار دادن حسگر پیشنهاد میکنند. یک روش الگوریتم ژنتیک برای بهینه سازی قرارگیری حسگر در [ 16 ] پیشنهاد شد. یک رویکرد مبتنی بر یک تکنیک بهینهسازی تکاملی موازی برای انتخاب و سفارش مکانهای کاندید برای حسگرها در [ 17 ] توسعه داده شد. کار دیگری که در [ 18 ] ارائه شده است با هدف قرار دادن حسگرها بر اساس تکنیک آنیل شبیه سازی شده برای یافتن بهترین پیکربندی شبکه است. تمام این سه روش بر روی بسیار ساده ترین محیط هایی که پیچیدگی و تنوع مناظر واقعی را منعکس نمی کنند، اعمال شد.
یک الگوریتم مبتنی بر Voronoi در [ 19 ] توسعه داده شد که یک مدل سطح دیجیتال منطقه مورد نظر را ادغام می کند. این الگوریتم از کار [ 20 ] الهام گرفته شده است که سه استراتژی Voronoi را پیشنهاد می کند: (1) مبتنی بر برداری (VEC)، (2) مبتنی بر Voronoi (VOR) و (3) Minimax. نویسندگان در [ 19 ] ابتدا پیشنهاد می کنند که یک نمودار Voronoi از موقعیت اولیه حسگرها تولید شود. سپس، شبکه حسگر با حرکت دادن هر حسگر به سمت دورترین راس Voronoi تا رسیدن به بالاترین ارتفاع در داخل سلول Voronoi بهینه می شود. به همین ترتیب، یک کار تحقیقاتی پیشنهاد شده توسط [ 21] یک مدل سنجش احتمالی را با یک مدل سطح دیجیتال ترکیب می کند تا مکان بهینه شبکه حسگر را تعریف کند. این مدل سنجش احتمالی متشکل از توابع عضویت بر اساس محدوده سنجش و زاویه سنجش است.
ذکر این نکته ضروری است که این دو الگوریتم اخیر که واقعیت منظر را از طریق یک مدل سطح دیجیتال ادغام میکنند، از روش خط دید برای تعیین درصد پوشش استفاده میکنند. هنگامی که با یک مدل سطح دیجیتال (یا مدل دیجیتال زمین) ترکیب می شود، روش خط دید روشی بسیار موثر برای قرار دادن دوربین مداربسته است، زیرا امکان معرفی برخی از ویژگی های مهم دوربین ها مانند موقعیت سه بعدی هر دوربین، آزیموت مشاهده را فراهم می کند. ، میدان دید، برد دوربین و غیره . (لطفا برای جزئیات بیشتر به بخش 3 مراجعه کنید).
2.3. بحث
انتخاب یک روش استقرار مناسب شبکه دوربین به شدت به هدف هر سیستم بستگی دارد. در واقع، روشهای مبتنی بر هدف برای نظارت بر اشیاء خاصی که ممکن است در محیط نظارت شده حرکت کنند، مناسبتر هستند، در حالی که هدف روشهای مبتنی بر چشمانداز، به حداکثر رساندن منطقه پوشش به منظور مشاهده کل صحنه مورد نظر است. هدف اصلی این مقاله پیشنهاد یک روش جدید است که به رویکرد مبتنی بر منظر تعلق دارد. روش پیشنهادی ما نیز مبتنی بر تقسیمبندی فضا با استفاده از نمودار ورونوی است (همانطور که کارهای [ 19 , 20 , 21]). با این حال، همانطور که در بخشهای بعدی توضیح داده شد، راهحل پیشنهادی از دو جنبه اساسی با سایر روشهای موجود در ادبیات متفاوت است: (1) انتخاب اشیایی که نمودار Voronoi را ایجاد میکنند و (2) روش ارزیابی سطح پوشش.
از یک طرف، روشهای مبتنی بر Voronoi که در کار قبلی ارائه شدهاند ([ 19 ، 20 ، 21 ]) از موقعیت مورد انتظار حسگرها (دوربینها) برای تولید نمودار Voronoi استفاده میکنند. هر سلول Voronoi شامل اشیاء محیطی است که ممکن است توسط حسگر مربوطه نظارت شود. با این حال، عاقلانه تر خواهد بود که با تجزیه و تحلیل محیطی که در آن استقرار سنسور انجام می شود، شروع کنیم و سپس موقعیت بهینه سنسورها را بر اساس نتیجه چنین تحلیلی پیشنهاد کنیم. برای این منظور، نمودار ورونوی بر اساس اشیاء مورد علاقه (به عنوان مثال، ساختمانها) که در محیط نظارت شده وجود دارند. پس از آن، دوربین ها ابتدا در لبه هر سلول Voronoi قرار می گیرند.
از سوی دیگر، روشهایی که یک مدل از ناحیه مورد نظر را هنگام محاسبه پوشش ادغام میکنند، از یک مدل بسیار ساده ([ 16 ، 17 ، 18 ]) یا یک مدل سطح دیجیتال (DSM) استفاده میکنند که فقط سطح پوشش را نشان میدهد. محیط نظارت شده ([ 19 ، 21 ]). این دسته دوم فقط امکان ارزیابی سطح پوشش سطحی که از بالا قابل مشاهده است را می دهد. با این وجود، ارزیابی میزان دید سطوح عمودی که ممکن است بسیار مهم باشد مانند دیوارها، درها، پنجرهها و غیره از طریق این روشها غیرممکن است.. از این رو، ترکیب ارزیابی دید بر اساس DSM شطرنجی با مدلهای سه بعدی که تمام جنبههای (سطح و عمودی) اشیاء را در محیط مورد نظر در نظر میگیرد، مهم است.
در بخش های بعدی، یادآوری اصول اصلی نمودارهای ورونوی و همچنین محاسبه پوشش ارائه شده است. پس از آن، رویکرد پیشنهادی به نام «HybVOR» برای استقرار دوربینهای نظارتی به تفصیل بیان میشود.
3. محاسبه پوشش بر اساس خط دید
مفهوم پوشش نشان می دهد که چگونه یک منطقه توسط مجموعه ای از حسگرها نظارت می شود [ 22 ]. مشکل پوشش در ادبیات علمی بر اساس چندین رویکرد، بسته به ماهیت کاربرد، بررسی شده است. یک مثال مشکل گالری هنری است که هدف آن تعیین تعداد دوربین مورد نیاز است که در آن هر نقطه از گالری توسط حداقل یک ناظر پوشش داده شده است [ 22 ]. در مسئله گالری هنری، پوشش با دید مستقیم بین ناظر و هدف تعریف می شود [ 23 ]. مثال دیگر مربوط به مسائل پوشش، افزایش طول عمر حسگرها از طریق کاهش مصرف انرژی است ([ 24 ، 25 ، 26 ]]). این رویکردها سعی میکنند حسگرهای اضافی را که همان منطقه را پوشش میدهند، شناسایی و خاموش کنند، زمانی که استفاده از آنها سودمند نیست.
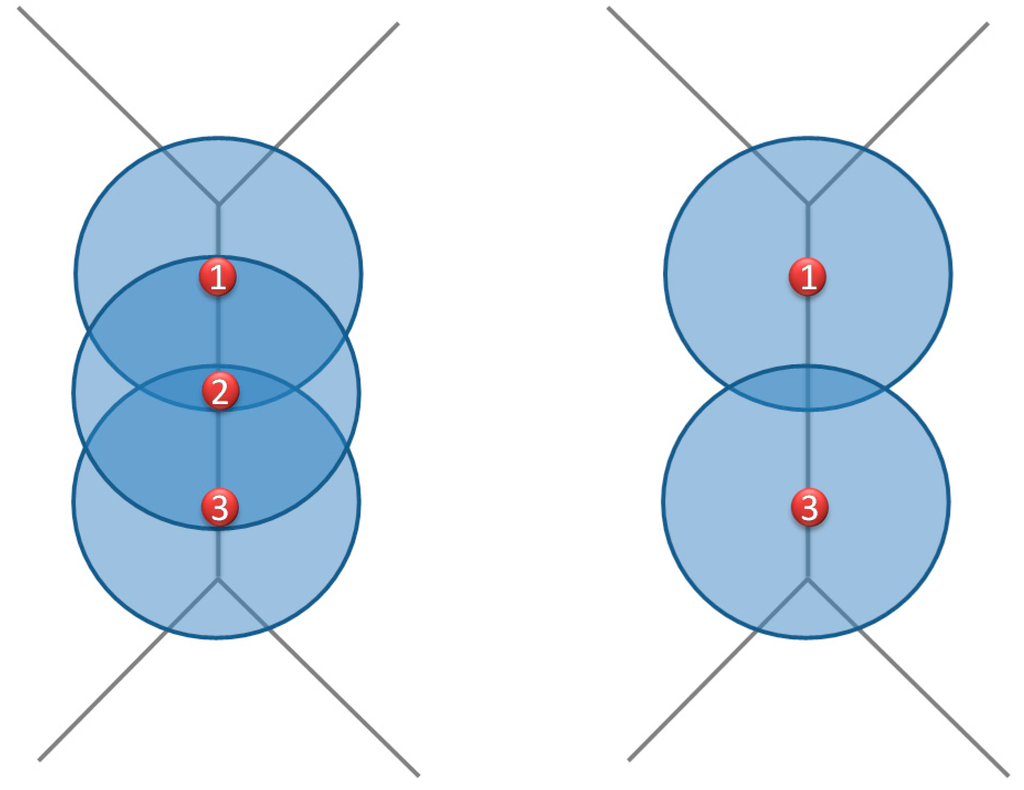
یک تعریف کلی از مسئله پوشش توسط [ 22 ] ارائه شد، آن تصریح می کند که برای مجموعه معینی از حسگرهای مستقر در یک منطقه هدف، هر نقطه در منطقه مورد نظر توسط حداقل k حسگر پوشش داده می شود، جایی که k تعداد حسگرهایی که به طور همزمان هدف را رصد می کنند. در شکل 1 ، دایره سفید مربوط به ناحیه تحت پوشش یک سنسور، مناطق نقطه چین مربوط به مناطق تحت پوشش دو حسگر، منطقه خاکستری مربوط به ناحیه تحت پوشش سه حسگر، و ناحیه چین شده مربوط به ناحیه غیر پوشیده شده است. .
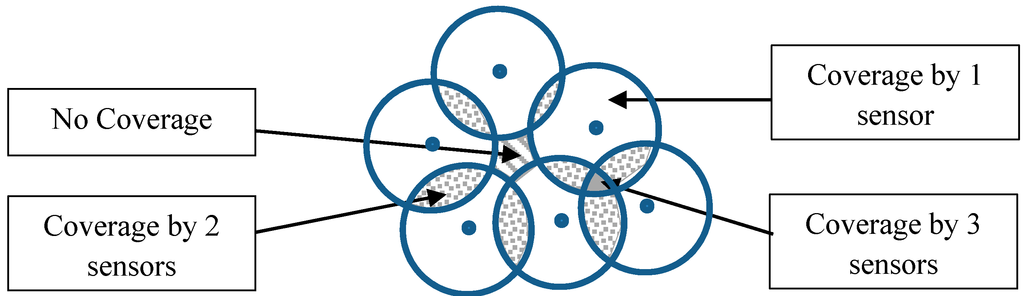
شکل 1. مناطق تحت پوشش تولید شده توسط مجموعه ای از حسگرها.
پوشش عمدتاً مربوط به محدوده حسگر هر سنسور است که مربوط به پدیده نظارت شده و موانعی است که در منطقه هدف وجود دارد. از این رو، توسعه مدلی که امکان محاسبه پوشش را می دهد باید ماهیت برنامه و وجود موانع را در نظر بگیرد. در مورد استقرار شبکه دوربین، خط دید ممکن است به عنوان روشی مناسب برای مدلسازی پوشش شبکه دوربین در نظر گرفته شود ([ 19 ، 21 ، 27 ، 28 ]). در واقع، مدل “خط دید” میزان دید را بر اساس یک خط بصری از دیدگاه O (یا ناظر) به نقطه دیگر T محاسبه می کند.که متعلق به منطقه مورد نظر است. اگر این خط بصری با هر مانعی قبل از رسیدن به T قطع شود ، T پنهان است و از O قابل مشاهده نیست ، در غیر این صورت، T از O [ 27 ] قابل مشاهده است ( شکل 2 ).
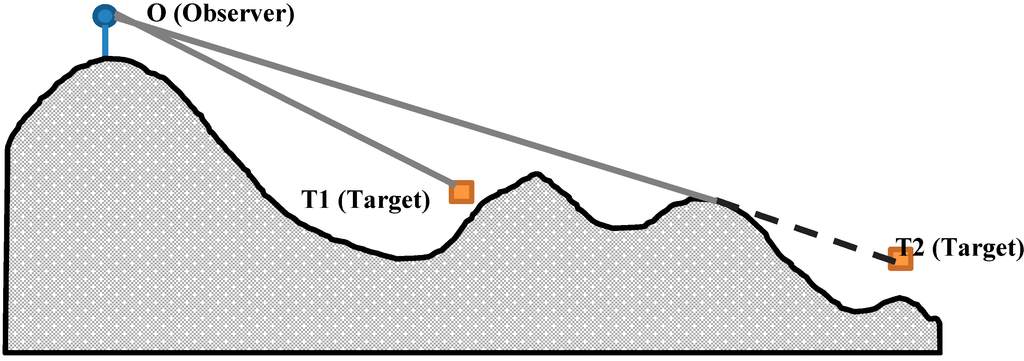
شکل 2. دید بر اساس خط دید. هدف T1 از O قابل مشاهده است اما هدف T2 از O قابل مشاهده نیست (خط خاکستری: قابل مشاهده، خط چین: نامرئی).
هنگامی که فرآیند تحلیل دید بر روی تمام نقاطی که به منطقه هدف تعلق دارند اعمال می شود، ما در مورد “تحلیل دیدگاه” صحبت می کنیم. این ناشی از حرکت خط دید در سراسر سطح مورد نظر است [ 28 ]. تحلیل دیدگاه می تواند بر اساس یک یا چند دیدگاه انجام شود. نتیجه تجزیه و تحلیل دیدگاه شامل تعیین مجموعه ای از نقاط روی سطح است که قابل مشاهده هستند (و قابل مشاهده نیستند) از مجموعه دیدگاه ها [ 27 ].
3.1. ساخت “خطوط دید” برای تحلیل دیدگاه
نقطه ناظر، که مربوط به موقعیت دوربین است، با مختصات 2 بعدی (x, y) و ارتفاع آن (z) مشخص می شود. موقعیت مکانی دوربین ها ممکن است با استفاده از یک مدل سطح دیجیتال (یا مدل ارتفاعی دیجیتال) تعیین شود که نشان دهنده محیطی است که در آن استقرار انجام خواهد شد. در ArcGIS 10.1 که یک نرم افزار طراحی شده توسط شرکت ESRI است، تجزیه و تحلیل Viewshed بر اساس خط دید با موارد زیر مشخص می شود: (1) مقدار ارتفاع دوربین (SPOT)، (2) افست عمودی (OFFSETA، OFFSETB)، (3) زوایای اسکن افقی (AZIMUTH1، AZIMUTH2)، (4) زوایای اسکن عمودی (VERT1، VERT2)، و (5) فواصل اسکن (RADIUS1، RADIUS2) (راهنمای ArcGIS، 10.1). شکل 3نه پارامتری را نشان می دهد که برای انجام تحلیل دیدگاه در ArcGIS 10.1 استفاده می شود.

شکل 3. پارامترهای مورد استفاده برای انجام تحلیل viewshed در ArcGIS 10.1 [ 29 ].
در اینجا توضیحات 9 پارامتر مورد استفاده برای کنترل تجزیه و تحلیل viewshed آورده شده است (ArcGIS Help, 10.1):
-
SPOT : مربوط به ارتفاع زمین برای نقطه ناظر ( یعنی دوربین).
-
OF1 و OF2 : این دو پارامتر ارتفاع عمودی را که باید به ارتفاع زمین ناظر OF1 (OFFSETA) و هدف OF2 (OFFSETB) اضافه شود، تعیین می کنند.
-
AZ1 و AZ2 : این دو مقدار اجازه می دهد تا محدوده زاویه افقی را که اسکن را از ناظر مشخص می کند (به عنوان مثال ، دوربین) تعیین کنید. AZ1 (AZIMUTH1) با زاویه شروع محدوده اسکن و AZ2 (AZIMUTH2) با زاویه پایان محدوده اسکن مطابقت دارد. توجه داشته باشید که مقادیر AZ1 و AZ2 ممکن است از 0 تا 360 درجه باشد که در آن 0 با جهت شمال تعریف می شود.
-
V1 و V2 : این دو عنصر محدوده عمودی اسکن را از ناظر محدود می کنند. V1 (VERT1) حد بالایی زاویه عمودی و V2 (VERT2) حد پایینی زاویه عمودی را تعیین می کند. توجه داشته باشید که V1 و V2 ممکن است از -90 درجه تا 90 درجه متفاوت باشد.
-
R1 و R2 : این پارامترها مسافتی را که ممکن است توسط ناظر ( یعنی دوربین) طی شود را تعیین می کند. R1 (RADIUS1) مربوط به فاصله شروعی است که ممکن است یک هدف از آن قابل مشاهده باشد (نقاط نزدیکتر از R1 مطمئنا قابل مشاهده نیستند). R2 (RADIUS2) مربوط به فاصله پایانی است که در آن نقطه فراتر از این فاصله مطمئنا قابل مشاهده نخواهد بود.
3.2. محاسبه Viewshed
بر اساس 9 پارامتر ارائه شده در بخش قبل، یک خط دید برای هر نقطه در منطقه مورد نظر ساخته شده است. سپس برای محیطی که دوربینها در آن قرار میگیرند، میزان دید محاسبه میشود. بیایید مفروضات زیر را در نظر بگیریم:
-
O i (xi ، y i ، z i ) نقطه مشاهده ای است که در آن “i” شاخص هر نقطه ناظر است، i = 1، 2، …، n . توجه داشته باشید که z i = SPOT i + OF1 i .
-
T j (x j , y j , z j ) نقطه هدفی است که “j” شاخص هر هدف است، j= 1, 2, …, m. توجه داشته باشید که z j = H j + OF2 i ، که در آن H j ارتفاع سطحی است که با هدف T j مطابقت دارد .
-
OT ij (x j − x i , y j − y i , z j − z i ) خط دیدی است که توسط ناظر O i با شاخص «i» و هدف T j با شاخص «j» ساخته شده است. فاصله خط دید به صورت ||OT ij || نوشته می شود .
سپس تجزیه و تحلیل دیدگاه به صورت زیر انجام می شود. اگر یکی از شرایط بعدی برآورده شود، T j هدف از مشاهدهگر O i قابل مشاهده نیست :
- (1)
-
خط دید OT ij بین ناظر O i و هدف T j توسط یک یا چند مانع پوشیده شده است ( شکل 3 ).
- (2)
-
هدف T j خارج از محدوده فاصله تعریف شده توسط R1 i و R2 i است :( ||OT ij || < R1 i ) یا ( ||OT ij || > R2 i ).
- (3)
-
هدف T j خارج از محدوده زاویه افقی است که توسط AZ1 i و AZ2 i تعریف شده است :( Arctan((yj − y i )/( xj − xi )) < AZ1 i ) و ( Arctan((y j − y i ) /(x j − x i ) ) > AZ2 i ) .
- (4)
-
هدف T j خارج از محدوده زاویه عمودی است که توسط V1 i و V2 i تعریف شده است :( Arcsin((z j − z i )/||OT ij ||) < V1 i ) و ( Arcsin((z j − z i )/||OT ij ||) > V2 i ).
- (5)
-
اگر همه این شرایط قبلی (1) تا (4) برآورده نشدند، هدف T j از مشاهدهگر O i قابل مشاهده است .
حتی اگر اصل تحلیل خط دید مبتنی بر رویکرد هندسی باشد، پیادهسازی viewshed در نرمافزار GIS به طور کلی بر روی یک مدل سطح دیجیتال (یا مدل دیجیتال ارتفاع) در قالب شطرنجی انجام میشود [ 27 ]. این به دلیل حجم عظیمی از محاسبات مورد نیاز برای ایجاد یک خط دید برای هر رأس داده های برداری است که یک محیط بزرگ را نشان می دهد. با این حال، همچنین می توان با استفاده از یک شبکه نامنظم مثلثی (TIN) به عنوان یک مدل دیجیتال برای منطقه هدف، یک تحلیل دید بر اساس خط دید تولید کرد [ 27 ].]. در یک GIS سه بعدی، ساخت خطوط دید بر اساس یک محاسبات گسسته است، زیرا لازم است که اشیاء سه بعدی که این خطوط از آنها ساخته می شوند، مشخص شوند. همانند داده های برداری، تعداد رئوس در اشیاء سه بعدی مورد استفاده در تجزیه و تحلیل viewshed باید معقول باشد تا از خرابی های احتمالی نرم افزار در هنگام محاسبه تمام خطوط دید جلوگیری شود.
4. مبانی نمودار ورونوی
همانطور که در بخش 2 اشاره شد ، مفهوم نمودار ورونوی در چندین مطالعه برای استقرار شبکه های حسگر و دوربین های نظارتی استفاده شده است ([ 19 ، 20 ، 21 ، 23 ]). این مفهوم به افتخار ریاضیدان گئورگی فئودوسویچ ورونوی (1868-1908) نامگذاری شده است که مبانی ریاضی چنین مفهومی را بر اساس کار پیتر گوستاو لژون دیریکله (1805-1859) معرفی کرد [ 30 ]. نمودار ورونوی مجموعه ای از “سایت ها” از تقسیم (بخش بندی) فضا به مناطق حاصل می شود. هر منطقه ای که با سایت “s” مطابقت دارد، شامل تمام نقاطی است که از هر سایت دیگری به “s” نزدیکتر هستند [ 31 ].
تعریف رسمی نمودار ورونوی
اجازه دهید S = {s 1 , s 2 , …, s n } را به عنوان مجموعه ای از نقاط به نام “سایت ها” یا “مولد” در فضای E ( R 2 یا R 3 ) نشان دهیم. همچنین s i و s j را به عنوان دو سایتی که متعلق به S هستند در نظر بگیرید. تسلط ( DOM ) s i بر s j را می توان به عنوان زیرمجموعه فضای E فرمول بندی کرد که حداقل به s i نزدیک به s j است.. این تسلط ممکن است به صورت زیر فرموله شود [ 32 ]:
D O M(سمن ، سj) = { p ∈ E | D i s t ( p , سمن) ≤ D i s t ( p , سj) }��م(سمن ، س�)= { پ∈� | �منستی(پ ، سمن) ≤ �منستی(پ ، س�)}
جایی که: Dist (a,b) فاصله اقلیدسی بین نقطه a و b است و p نقطه ای است که متعلق به فضای E است.
از موارد فوق، یک منطقه Voronoi ( VOR ) ایجاد شده توسط یک سایت s i نتیجه تلاقی همه تسلط های s i بر سایت های باقی مانده در S است. این یعنی [ 32 ]:
VO R (سمن) = ∩ سj∈ اس– {سمن}D O M(سمن ، سj)��آر(سمن)= ∩ س�∈اس–{سمن}��م(سمن ، س�)
بنابراین، نمودار Voronoi ( DIAVOR ) تولید شده از مجموعهای از سایتها S = {s 1 , s 2 , …, sn } مجموعهای از تمام مناطق Voronoi است که کل فضا را تقسیم میکند:
VO R (سمن) = ∩سj∈ اس– {سمن}D O M(سمن ، سj)��آر(سمن)= ∩س�∈اس–{سمن}��م(سمن ، س�)
شکل 4 نمودار Voronoi را نشان می دهد که از مجموعه ای از سایت ها حاصل می شود:

شکل 4. نمودار Voronoi که از مجموعه ای از “سایت ها” تولید شده است.
در یک نمودار ورونوی، هر نقطه در یک یال ورونوی از دو سایتی که مناطق متناظر آنها با این یال مشترک هستند فاصله دارد. همچنین، هر رأس از نزدیکترین سه سایتی که مناطق Voronoi را ایجاد می کنند، فاصله دارد [ 32 ]. علاوه بر این، اصول نمودار Voronoi ممکن است به جای نقاط معمولی به انواع مختلف سایت ها یا “مولدها” مانند خطوط، چندضلعی ها و ویژگی های وزن دار (نقطه، خط، چندضلعی) تعمیم داده شود [ 33 ]. شکل 5 نمودارهای Voronoi را نشان می دهد که از خطوط و چند ضلعی های بدون وزن (A, C) و از خطوط وزن دار و چند ضلعی (B, D) که شکلی یکسان با (A, C) دارند ایجاد شده است. وزن استفاده شده در شکل 5مربوط به طول خط برای B و ناحیه چند ضلعی برای D است. رنگهای خاکستری با فاصله (یا فاصله وزنی در مورد B و D) بین هر نقطه و نزدیکترین ویژگی مولد مطابقت دارد [ 33 ]. برای جزئیات بیشتر در مورد اصول ریاضی و کاربردهای نمودارهای ورونوی، خواننده به [ 30 ] مراجعه می کند.

شکل 5. نمودارهای ورونوی تولید شده از خطوط و چندضلعی ها. ( A ) خطوط بدون وزن، ( B ) خطوط وزن دار، ( C ) چند ضلعی های بدون وزن، و ( D ) چند ضلعی های وزن دار (اقتباس از [ 33 ]).
5. قرار دادن دوربین بر اساس رویکرد HybVOR
هدف اصلی این کار پیشنهاد رویکردی جدید برای استقرار دوربینهای نظارتی به نام HybVOR است که از خانواده روشهای مبتنی بر Landscape است. این رویکرد در درجه اول برای نظارت بر محیط ساخته شده توسعه یافته است. در واقع در چنین محیطی مهمترین عناصری که در استقرار شبکه دوربین مانیتورینگ باید مورد توجه قرار گیرند عبارتند از: مسیرها، نماهای ساختمان و ورودی ها. همچنین لازم است تعداد دوربین ها را با دستیابی به بالاترین سطح پوشش ممکن بهینه کرد. در مطالعه موردی ما که مربوط به بندر جده است، این عناصر کلیدی توسط مقامات گارد ساحلی (مقام مسئول حفاظت از امنیت این تأسیسات) از طریق پرسشنامه ای که به عنوان بخشی از این مطالعه تهیه شده است، تأیید شده است. علاوه بر این مسئولان به ما اطلاع دادند که سقف ساختمان ها به اندازه نما یا ورودی مهم نیست. بنابراین، هدف اصلی رویکرد HybVOR رسیدن به پوشش نزدیک به 100٪ در حالی که بر روی اشیاء زیر تمرکز میکند: (1) مسیرها، (2) نماها و ورودیهای ساختمان، (3) حداقل تعداد دوربین ممکن است.
رویکرد HybVOR برای استقرار شبکه دوربین های نظارتی به یک مدل ارتفاعی دیجیتال (DEM) نیاز دارد که ارتفاع زمین منطقه هدف را نشان می دهد. علاوه بر این، به یک داده برداری سه بعدی نیاز دارد که ساختمان ها و ویژگی های آنها و همچنین سایر اشیاء را که می توانند برای محاسبه دید مفید باشند (مانند درختان و مبلمان خیابان) مدل می کند. داده های مورد نیاز برای ارزیابی پوشش عمدتاً از بررسی توپوگرافی سایت مورد علاقه به دست می آید.
5.1. ایجاد نمودار Voronoi از ساختمان ها
هدف رویکرد HybVOR یافتن مکانیابی بهینه شبکه دوربینهای نظارتی بر اساس نمودار Voronoi ایجاد شده از ردپای ساختمانهای واقع در محیط است. روشهای قبلی مبتنی بر Voronoi که قبلاً ذکر شد، از موقعیتهای دوربین بهعنوان نقاط مولد استفاده میکنند که برای بخشبندی فضای نظارتشده ([ 19 ، 20 ، 21 ، 23 » استفاده میکنند.]). سپس، این روش ها از الگوریتم های مختلفی برای بهبود سطح پوشش با تغییر موقعیت دوربین ها یا اضافه کردن دوربین های جدید استفاده می کنند. همه این روشها راه مؤثری برای تعیین موقعیت اولیه دوربینها که تا حد امکان نزدیک به مکان بهینه باشد، ارائه نمیکنند. رویکرد HybVOR یک روش اصلی برای غلبه بر این ضعف ارائه می دهد. اصل این است که از ساختمان ها به عنوان اشیاء مولد برای نمودار ورونوی استفاده شود. پس از آن، دوربین های نظارتی بر روی لبه های Voronoi قرار خواهند گرفت. این نوع قرارگیری امکان دستیابی به سه هدف اصلی را فراهم می کند: (1) به حداقل رساندن تعداد دوربین ها برای حداکثر پوشش ممکن، (2) ارائه قابلیت مشاهده بهتر برای نماها و ورودی ساختمان ها و (3) تضمین حداکثر پوشش برای جاده ها.
5.1.1. به حداقل رساندن تعداد دوربین ها برای حداکثر پوشش ممکن
مشخص است که نقاط متعلق به یک یال Voronoi این ویژگی را دارند که با اشیاء مولد که در این یال مشترک هستند فاصله یکسانی داشته باشند. بنابراین، اگر دوربینی بر روی لبه ورونوی قرار گیرد، تا حد امکان به دو ساختمان متناظر (که اشیاء مولد هستند) به طور همزمان نزدیک خواهد شد. علاوه بر این، اگر دوربینی بسیار نزدیکتر به یک ساختمان قرار گیرد، به طور خودکار از ساختمان رو به رو دورتر می شود. این می تواند تعداد دوربین های مورد نیاز را برای پوشش کل محیط افزایش دهد. شکل 6 مزیت قرار دادن دوربین ها بر روی لبه Voronoi به منظور کاهش تعداد آنها را نشان می دهد. توجه داشته باشید که تعداد کل دوربین های مورد نیاز برای پوشش یک منطقه کامل به پارامترهای دوربین هایی که قرار است نصب شوند بستگی دارد. بخش 5.2به توضیح روش مورد استفاده برای استقرار دوربین ها بر روی لبه های Voronoi بسته به پارامترهای دوربین ها و موقعیت ساختمان ها اختصاص دارد.

شکل 6. مزیت قرار دادن دوربین روی لبه Voronoi. ( A ) دوربین روی لبه Voronoi قرار می گیرد، ( B , C ) دوربین دورتر از لبه Voronoi قرار می گیرد.
5.1.2. ارائه قابلیت مشاهده بهتر برای نما و ورودی ساختمان ها
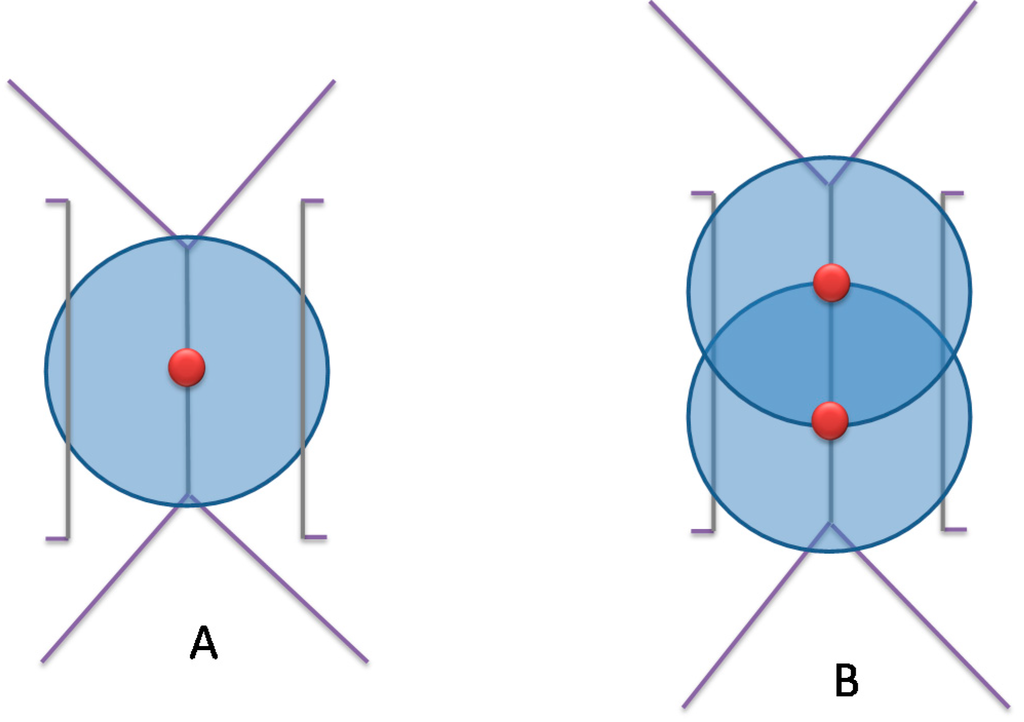
برای داشتن قابلیت مشاهده بهتر، اشیاء در محیط باید تا حد امکان در تصویر یا ویدیو بزرگ باشند [ 6 ]. برای دستیابی به این هدف، لازم است که “اثر کوتاه کننده” را به حداقل برسانیم. این اثر بر مقدار اطلاعاتی که ممکن است از یک مشاهده استخراج شود تأثیر می گذارد [ 1 ]. جلوه کوتاه کننده زمانی ظاهر می شود که زاویه بین دید دوربین و جسم به طور فزاینده ای کوچکتر شود. بر این اساس، طرح ریزی شی در پلان تصویر دوربین کاهش می یابد و شی مورد نظارت بر روی تصویر کوتاهتر ظاهر می شود [ 6 ]. شکل 7 تأثیر اثر کوتاهکننده را نشان میدهد.

شکل 7. تاثیر اثر کوتاه کننده. ( الف ) تصویر بدون جلوه کوتاه کننده و ( ب ) تصویر با جلوه کوتاه کننده.
در مورد مانیتورینگ یک محیط ساخته شده و با در نظر گرفتن حداقل تعداد دوربین ممکن، قرار دادن دوربین نزدیکتر به ساختمان نسبت به رو به رو، زمانی که دوربین به دورترین ساختمان هدایت می شود، جلوه کوتاه کننده را افزایش می دهد. ظاهر اثر کوتاه شدن ممکن است ناشی از فاصله زیاد دورترین ساختمان در مقایسه با نزدیکترین آن باشد، به خصوص اگر زاویه بین دید دوربین و نمای دورترین ساختمانی که باید نظارت شود کوچک باشد. بنابراین، استقرار دوربینها در لبههای Voronoi، جلوههای کوتاهکننده را در هر دو طرف بهینه میکند و از این رو، دید بهتری را برای نماها و ورودیهای ساختمان فراهم میکند.
5.1.3. تضمین حداکثر پوشش برای جاده ها
به طور کلی، جاده ها برای اطمینان از دسترسی به ساختمان ها در یک محیط ساخته شده ساخته می شوند. بنابراین، جاده ها تقریباً در فاصله مساوی از ساختمان هایی قرار دارند که در آنها خدمت می کنند. از این رو، لبههای Voronoi که از ردپاهای ساختمانها ایجاد میشوند، کاملاً به جادههایی که در محیط ساخته میشوند، نزدیک خواهند بود. از این رو، قرار دادن دوربین ها بر روی لبه های Voronoi قابلیت مشاهده و پوشش بهتری را برای جاده ها فراهم می کند و در عین حال تعداد دوربین ها را به حداقل می رساند ( شکل 8 ).
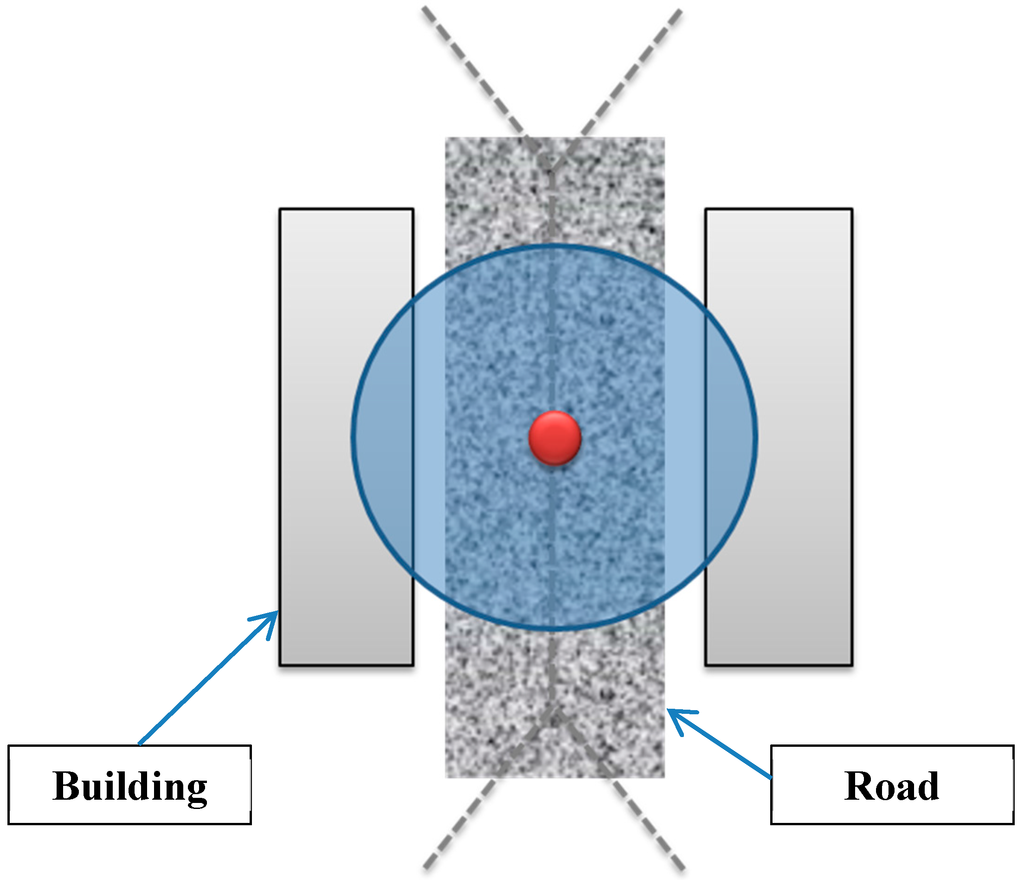
شکل 8. قرار دادن دوربین در لبه Voronoi برای مشاهده و پوشش بهتر جاده ها.
5.2. استقرار شبکه دوربین
پس از تاکید بر اهمیت قرار دادن دوربین ها بر روی لبه های Voronoi در بخش 5.1 ، گام بعدی یافتن بهترین موقعیت هر دوربین به منظور دستیابی به حداکثر پوشش ممکن و در عین حال به حداقل رساندن تعداد دوربین ها است. برای انجام این کار، بهترین مکان در لبه Voronoi بر اساس سه محدودیت تعریف میشود: (1) پارامترهای دوربین، (2) موقعیت ساختمانها و (3) به حداقل رساندن اثر کوتاهکننده.
در این کار دو فرض در نظر گرفته شده است. اولین مورد این است که دوربین ها باید روی قطب ها نصب شوند. این گفته توسط گارد ساحلی بندر جده تایید شده است. فرض دوم بیان میکند که همه دوربینها دارای پارامترهای مشابه زیر هستند (به بخش 3.1 مراجعه کنید ):
- –
-
OFFSETB = 0 (هیچ هدف مصنوعی در زمین وجود ندارد).
- –
-
AZIMUTH1 = 0 درجه (زاویه افقی شروع).
- –
-
AZIMUTH2 = 360 درجه (زاویه افقی انتهایی محدوده اسکن).
- –
-
VERT1 = 90 درجه (حد بالای زاویه عمودی).
- –
-
VERT2 = -90 درجه (حد پایین زاویه عمودی).
- –
-
RADIUS1 = 0 (فاصله شروعی که ممکن است یک نقطه از آن قابل مشاهده باشد).
- –
-
RADIUS2 = ثابت (فاصله پایانی که در آن نقطه فراتر از این فاصله مطمئناً قابل مشاهده نیست، این پارامتر محدوده دوربین را نشان می دهد).
دو پارامتر دیگر از دوربین ها وجود دارد که ممکن است مقادیر متفاوتی داشته باشند که عبارتند از SPOT و OFFSETA :
- –
-
SPOT مربوط به ارتفاع زمین است که دوربین در آن قرار می گیرد.
- –
-
OFFSETA مربوط به ارتفاع ساختمان هایی است که باید از هر دوربین نظارت شود.
به منظور تولید نمودارهای ورونوی، از ردپای ساختمان ها به عنوان اشیاء مولد استفاده می شود. این ردپاها ممکن است یا از یک مدل موجود از ساختمانهای سه بعدی تولید شوند یا از بررسیهای توپوگرافی تشکیل شوند. هنگامی که نمودار Voronoi تولید شد، هر یال از یکی از دو رأس Voronoi بر اساس محدوده دوربین به شرح زیر تقسیم می شود:
-
اگر طول یک لبه Voronoi کمتر از برد دوربین باشد، این لبه تقسیم نخواهد شد.
-
اگر طول یک لبه Voronoi بیشتر از برد دوربین باشد، آنگاه این لبه به بخش های مساوی تقسیم می شود. تعداد این بخش های جدید بر اساس روش زیر محاسبه می شود:
مناف ( (LVE ) مo d (آرسییک متر ) = 0 ) T h e n N s = Cمن من ( _ LVEآرسییک متر)مناف ((��� )م�د (آرسیآمتر )=0) تیساعته� نس=سیهمنل (���آرسیآمتر)
دیگر ( (LVE ) مد (آرطب مکمل و جایگزین ) < > 0 ) سپس Ns = سقف (LVEآرطب مکمل و جایگزین) +1دیگر ((LVE )مد (آرطب مکمل و جایگزین )<>0) سپس Ns=سقف (LVEآرطب مکمل و جایگزین)+1
جایی که:
- –
-
Ns : تعداد بخشهای جدیدی است که از تقسیم یک لبه Voronoi ایجاد میشود.
- –
-
Ceil : تابع ریاضی است که قسمت صحیح یک عدد را محاسبه می کند (به عنوان مثال Ceil(1.45) = 1).
- –
-
Mod : تابع ریاضی است که باقیمانده یک تقسیم را محاسبه می کند.
- –
-
L VE : طول اصلی لبه Voronoi است.
- –
-
R Cam : برد دوربین است.
پس از آن، طول هر بخش جدید تولید شده برابر با:
Lاسp VE = (LVEنس)�اسپ�� =(���نس)
که در آن L SpVE طول هر قطعه جدیدی است که از تقسیم لبه Voronoi اصلی مربوطه تولید می شود.
شکل 9. قرار دادن دوربین ها روی لبه Voronoi. ( A ) طول لبه Voronoi کمتر از محدوده دوربین است، ( B ) طول لبه Voronoi بیشتر از محدوده دوربین است.
پس از تقسیم لبه Voronoi به بخش های مساوی، یک دوربین در نقطه میانی هر بخش جدید قرار می گیرد. انتخاب قرار دادن دوربین ها به این صورت، قابلیت رصد ساختمان ها را افزایش می دهد. در واقع، اگر دوربینی بر روی یک راس Voronoi قرار گیرد، ممکن است باعث شود که زوایای باریکی برای نظارت بر ساختمانها (و بهویژه ورودیهای ساختمان) ایجاد شود، که یکی از دلایل اصلی مشکل کوتاهسازی است. شکل 9 قرارگیری دوربین ها را در وسط بخش های Voronoi نسبت به ساختمان های اطراف نشان می دهد (به بخش 5.1 مراجعه کنید).
انتخاب تقسیم لبههای Voronoi بر اساس محدوده دوربین از این ایده ناشی میشود که هر دوربین باید توسط دو دوربین مجاور (جلو و عقب) قابل مشاهده باشد. از این رو، فاصله بین دو دوربین متوالی همیشه کمتر از برد دوربین خواهد بود. بنابراین، اگر دوربینی از کار بیفتد، هیچ سوراخ نظارتی (یا ناحیه بدون پوشش) در امتداد لبه Voronoi وجود نخواهد داشت، که باعث میشود تا زمان تعمیر دوربین شکسته پوشش همچنان قابل قبول باشد. شکل 10 منطقه تحت پوشش را به دلیل خرابی یک دوربین نشان می دهد.
شکل 10. منطقه تحت پوشش پس از خرابی یک دوربین.
برای اطمینان از نظارت کارآمد، دوربین ها باید در فاصله ای قرار گیرند که امکان مشاهده کامل نما و ورودی ساختمان ها را فراهم کند (طبق تایید گارد ساحلی سقف ساختمان ها در مطالعه موردی ما اولویت کمتری دارد). بنابراین، تعیین حداکثر فاصله مجاز بین ساختمان ها و لبه های ورونوی برای اطمینان از پوشش حداکثری نماها و ورودی ها ضروری است. شکل 11 روش مورد استفاده برای محاسبه این فاصله را بسته به برد دوربین و فاصله بین دو دوربین مجاور نشان می دهد (این فاصله نباید از محدوده دوربین تجاوز کند).


شکل 11. حداکثر فاصله مجاز D max بین ساختمان ها و لبه Voronoi.
که در آن، R محدوده دوربین ها و D max حداکثر فاصله مجاز بین یک ساختمان و یک لبه Voronoi است. بر اساس شکل 11 ، فاصله D max برابر است با:
Dm a x= (3–√/ 2 ) ×R�مترآایکس=(3/2)×آر
توجه به این نکته ضروری است که D max در معادله (7) یک تقریب بر اساس یک فرض دو بعدی است. محاسبه آن بر اساس یک فرض سه بعدی مقادیری تقریبا برابر برای دوربین هایی با ارتفاع حدود 10 متر به دست می دهد.
در موردی که یکی از ساختمان ها از لبه Voronoi با فاصله بیشتر از حداکثر فاصله ذکر شده دور باشد، تکرار این لبه Voronoi مورد نیاز است ( شکل 12 ). دوربین های مستقر در این لبه های تکراری باید دو شرط زیر را داشته باشند:
-
فاصله بین یک لبه Voronoi تکراری و ساختمان مربوطه نباید بیشتر از فاصله D max ذکر شده در معادله (7) باشد.
-
دوربین هایی که روی لبه Voronoi تکراری قرار می گیرند باید پوشش کامل لبه Voronoi مبدا را تضمین کنند.
توجه داشته باشید که اگر ساختمانی با یک فاصله مشخص از لبه ورونوی دور باشد، ساختمان روبهرو نیز از لبه ورونوی مشترک با همان فاصله دور خواهد بود.

شکل 12. تکرار لبه Voronoi و تعداد دوربین مربوطه.
در این مرحله مکان شبکه دوربین بر اساس نمودار ورونوی تولید شده از ردپای ساختمان ها به دست می آید. در بخش 5.3 ، از موقعیت های این دوربین ها برای ارزیابی و محاسبه سطح پوشش از طریق یک رویکرد ترکیبی استفاده می شود که ترکیبی از تحلیل شطرنجی و بردار سه بعدی دید است.
5.3. ارزیابی ترکیبی پوشش شبکه دوربین
پس از تعیین مکان دوربین ها، سطح پوشش بر اساس محاسبات viewshed ارزیابی می شود. رویکرد HybVOR پیشنهادی شامل ترکیب دو روش برای محاسبه viewshed است: مبتنی بر شطرنجی و مبتنی بر بردار سه بعدی.
5.3.1. محاسبه Viewshed مبتنی بر شطرنجی
این روش امکان ارزیابی درجه پوشش یک منطقه مورد علاقه را بر اساس مدل سطح دیجیتال (DSM) در قالب شطرنجی فراهم می کند. این DSM از ترکیب ارتفاع زمین با ارتفاع ساختمان ها حاصل می شود. برای ایجاد چنین DSM، یک مدل ارتفاعی دیجیتال (DEM) در قالب شطرنجی که ارتفاع زمین را نشان میدهد باید تولید شود. DEM شطرنجی به طور کلی از یک شبکه نامنظم مثلثی (TIN) استخراج می شود که نشان دهنده ارتفاع زمین است. سپس، ردپای ساختمان ها یا از یک مدل سه بعدی موجود از ساختمان ها یا از بررسی های توپوگرافی ایجاد می شود. پس از آن، این ردپاها که در فرمت برداری هستند با استفاده از همان وضوح DEM اصلی به فرمت شطرنجی تبدیل می شوند. مقادیر پیکسل در این شطرنجی به دست آمده با ارتفاع سقف هر ساختمان مطابقت دارد. بعد از آن، فایل شطرنجی که ارتفاع سقف ساختمان ها را نشان می دهد با DEM شطرنجی که با ارتفاع زمین مطابقت دارد ترکیب می شود. در اینجا مراحل اصلی برای انجام این ترکیب آمده است:
- –
-
برای هر پیکسلی که به DSM حاصله تعلق دارد:
-
اگر مقدار متناظر در فایل شطرنجی سقف ساختمان صفر باشد، مقدار پیکسل از DEM شطرنجی گرفته می شود.
-
در غیر این صورت، مقدار پیکسل از پیکسل مربوطه در فایل شطرنجی سقف ساختمان گرفته می شود.
-
ترکیبی از Raster DEM و اطلاعات ارتفاع از مدل ساختمان های سه بعدی، یک مدل سطح دیجیتال در قالب شطرنجی برای منطقه مورد نظر ارائه می دهد. این DSM به منظور ارزیابی پوشش شبکه دوربین از طریق رویکرد HybVOR اجباری است.
پس از تولید DSM، هر دوربین باید یک مقدار ارتفاع داشته باشد که با OFFSETA مطابقت دارد ( به بخش 3.1 مراجعه کنید). این مقدار افست با توجه به ارتفاع دو ساختمانی که به عنوان مولد لبه Voronoi در محل قرارگیری دوربین در نظر گرفته می شوند، انتخاب می شود. ارتفاع دوربین عمدتاً مربوط به امکان ساخت تیرک برای قرار دادن دوربین است. دو حالت رخ می دهد:
اولین مورد زمانی اتفاق می افتد که ساختمان های اطراف قطب دوربین خیلی بلند نیستند. در این شرایط، مقدار ارتفاع دوربین با بلندترین ساختمان مطابقت دارد. مزیت این معیار ارائه امکان نظارت بر سقف ها علاوه بر ورودی و نما می باشد. در غیر این صورت، اگر ساختن تیری که ارتفاعی برابر با ساختمان بلندتر داشته باشد، امکان پذیر نیست (یا سودآور نیست)، باید یک ارتفاع استاندارد برای تیرک برای قرار دادن دوربین انتخاب شود. با این حال، سقف ساختمان ها ممکن است از دوربین قابل مشاهده نباشد. این در مورد ما تأثیر زیادی نخواهد داشت زیرا سقف ساختمان ها همانطور که در بخش 5.2 ذکر شد اهمیت بالایی ندارد.
پارامترهای اصلی دوربینهایی که قرار است مستقر شوند (که در بخش 3.1 و شکل 3 توضیح داده شدهاند ) در جدول ویژگیهای کلاس ویژگی نقطهای که محل قرارگیری دوبعدی شبکه دوربین را نشان میدهد، ادغام میشوند. شکل 13 جدول ویژگی های کلاس “دوربین” را نشان می دهد. در این مثال برد تمامی دوربین ها ثابت و برابر با 100 متر است. همانطور که قبلا ذکر شد، پارامترهای OFFSETB ، AZIMUTH1 ، AZIMUTH2 ، VERT1 ، VERT2 ، RADIUS1 و RADIUS2 نیز ثابت هستند. با این حال، SPOT و OFFSETAممکن است بسته به مکان هر دوربین متفاوت باشد. ویژگی ID_ Camera نشان دهنده کلید اصلی کلاس “دوربین” است، یعنی هر دوربین یک شناسه منحصر به فرد خواهد داشت.
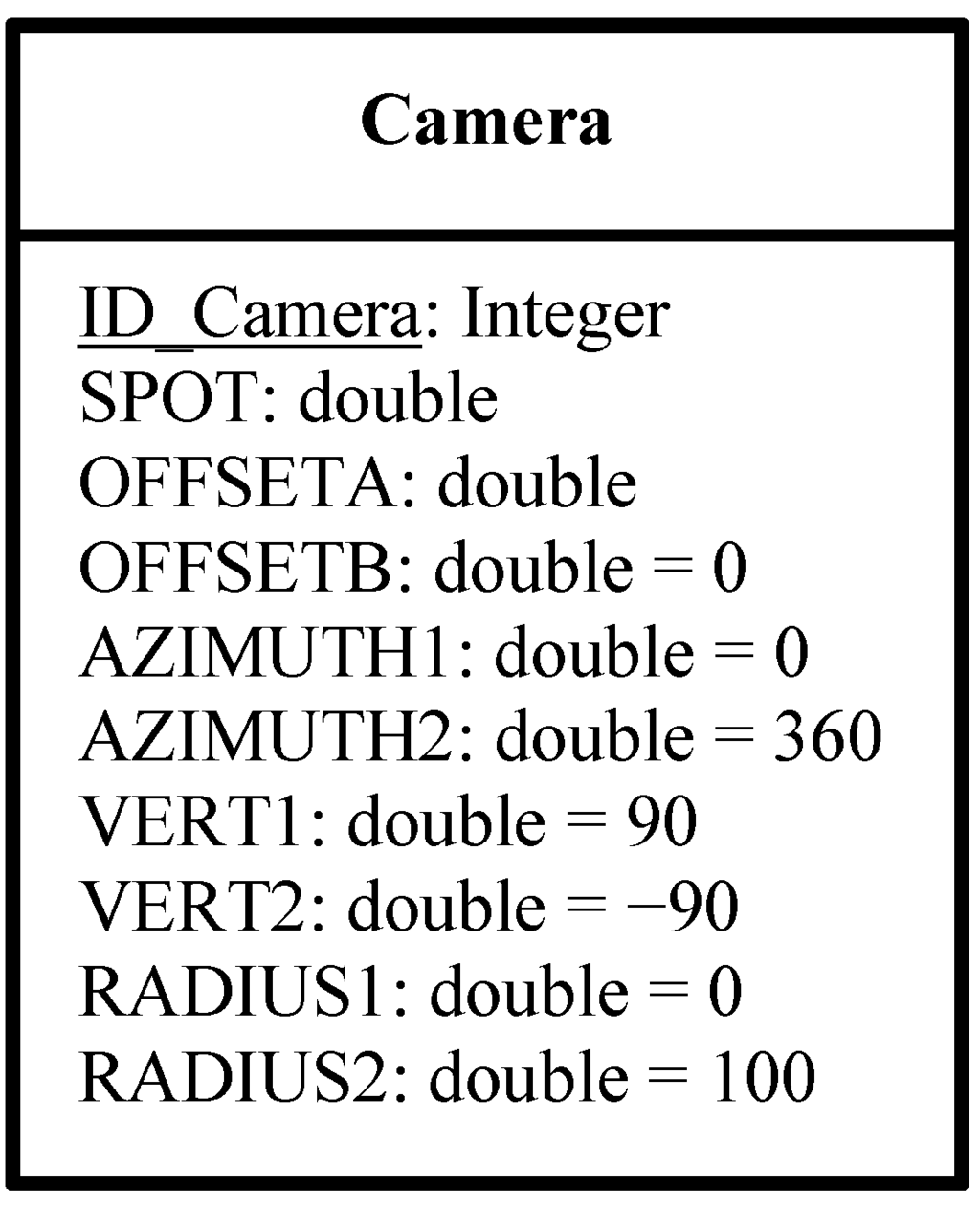
شکل 13. جدول ویژگی های کلاس “دوربین”.
هنگامی که DSM شطرنجی (که ارتفاع زمین را با ارتفاع ساختمان ترکیب میکند) و کلاس ویژگی که دوربینها را نشان میدهد (با موقعیت و ویژگی آنها) تولید شد، نمای دید محاسبه میشود. ایده این است که روش ارائه شده در بخش 3.2 را برای ارزیابی هر پیکسل که از یک یا چند دوربین متعلق به شبکه مستقر شده قابل مشاهده است یا نه، اعمال کنیم. جدول ویژگی های کلاس “Camera” برای ارائه پارامترهای دوربین هایی که برای محاسبه Viewshed مورد نیاز بودند استفاده می شود. در بخش 6.2 ، نتایج محاسبه شطرنجی Viewshed بر اساس یک DSM که منطقه ای از بندر دریایی جده را نشان می دهد، ارائه شده است.
5.3.2. تحلیل دید مبتنی بر برداری سه بعدی
مزیت استفاده از یک مدل برداری سه بعدی، انجام تحلیل دید بر روی عناصری است که بر اساس DSM شطرنجی قابل ارزیابی نیستند. در واقع، یک DSM شطرنجی فقط امکان محاسبه Viewshed اشیاء و ویژگی هایی را که روی سطح هستند، می دهد. از این رو، سقف ها تنها اجزای ساختمان هستند که ممکن است در DSM شطرنجی وجود داشته باشند. سایر اجزای عمودی ساختمان ها مانند نما، درها، پنجره ها را نمی توان در DSM شطرنجی مدل سازی کرد. به همین دلیل، لازم است ارزیابی پوشش شبکه دوربین با تحلیل دید مبتنی بر برداری سه بعدی تکمیل شود. این روش تجزیه و تحلیل دید شامل ایجاد خطوط دید بین هر دوربین و اشیاء مورد علاقه است که از این مکان نظارت خواهند شد ( شکل 2)). برای انجام این کار، لازم است یک رابطه چند به چند بین کلاس “دوربین” و کلاسی که نشان دهنده اشیاء مورد نظارت است ایجاد شود. کلاس “دوربین” حاوی اطلاعات بسیار مهمی در مورد ویژگی ها و موقعیت سه بعدی دوربین ها است که برای پیکربندی طرح فضایی شبکه مستقر ضروری است. در مورد ما، کلاس “ورودی” نشان دهنده ورودی های اصلی ساختمان ها (درها و پنجره ها) است. این رابطه چند به چند به این معنی است که یک دوربین ممکن است صفر، یک یا چند ورودی را نظارت کند و یک ورودی باید توسط یک یا چند دوربین نظارت شود ( شکل 14).). در صورت عدم وجود چنین رابطه ای، نرم افزار یک خط دید بین هر دوربین و تمام رئوس در مدل سه بعدی ایجاد می کند که منجر به زمان زیادی می شود و نتایجی را ارائه می دهد که تفسیر آنها دشوار است. شکل 14 نماد UML از رابطه چند به چند بین کلاس های “دوربین” و “ورودی” را نشان می دهد.

شکل 14. نماد زبان مدلسازی یکپارچه از رابطه چند به چند بین کلاسهای “دوربین” و “ورودی”.
خطوط دید ساخته شده نشان دهنده خطوط مستقیمی است که بین نقطه مشاهده (دوربین) و ویژگی هدف ارتباط برقرار می کند. ایجاد چندین خط دید بین یک دوربین و یک ویژگی هدف ممکن است در صورتی که این دومی یک ویژگی خط یا چندضلعی باشد با اعمال فاصله نمونه برداری.
تجزیه و تحلیل دید مبتنی بر بردار سه بعدی شامل ترکیب مدل های سه بعدی است که اشیاء را در محیط نظارت شده با خطوط دید ساخته شده نشان می دهد. هدف بررسی این است که آیا این اجسام خطوط دید بین دوربین و هدف را قطع می کنند یا خیر. سه مورد ممکن است رخ دهد ( شکل 15 ):
-
اگر یک یا چند جسم در محیط وجود داشته باشد که تمام خطوط دید بین دوربین و هدف را قطع کند، آنگاه این هدف کاملاً از دید دوربین نامرئی است.
-
اگر یک یا چند شی در محیط وجود داشته باشد که برخی از خطوط دید (نه همه خطوط دید) را بین دوربین و هدف قطع کند، این هدف تا حدی از دوربین قابل مشاهده است.
-
اگر هیچ جسمی وجود نداشته باشد که خطوط دید را بین دوربین و هدف قطع کند، این هدف کاملاً از دوربین قابل مشاهده است.
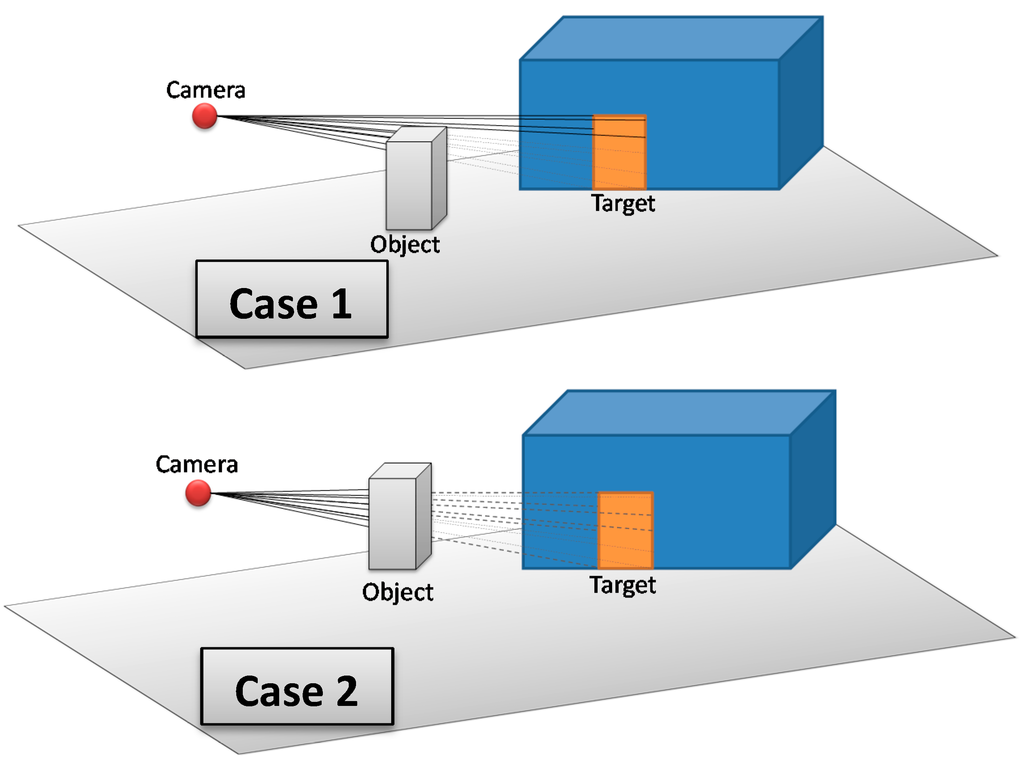

شکل 15. سه مورد احتمالی که ممکن است از تجزیه و تحلیل دید مبتنی بر برداری سه بعدی حاصل شود. حالت 1: هدف تا حدی قابل مشاهده است،
مورد 2: هدف کاملاً قابل مشاهده نیست و مورد 3: هدف کاملاً قابل مشاهده است.
شکل 16 مراحل اصلی در فرآیند اجرای رویکرد HybVOR برای استقرار شبکه دوربین های نظارتی را خلاصه می کند.
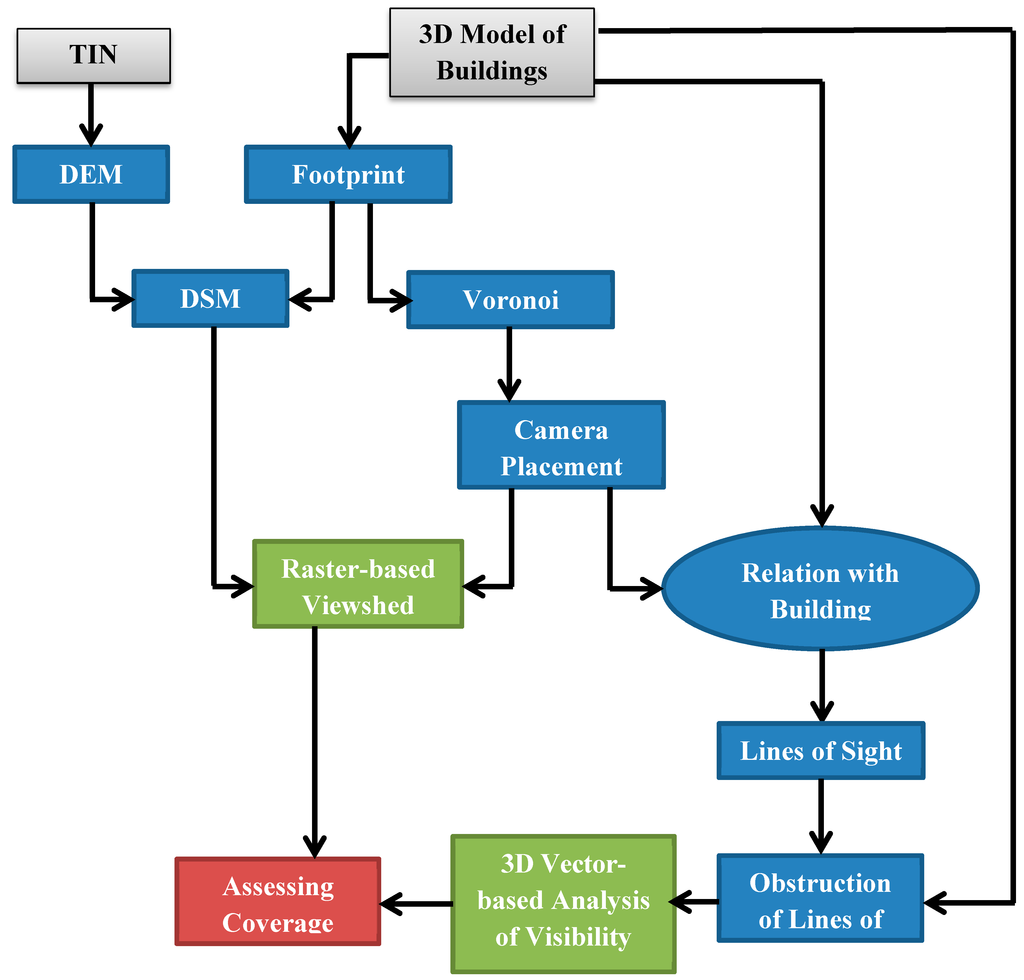
شکل 16. مراحل اصلی اجرای رویکرد هیبرید ورونوی (HybVOR).
در بخش 6 ، نتایج اجرای رویکرد HybVOR ارائه شده است. هدف یافتن مکان بهینه شبکه دوربین برای نظارت بر منطقه مورد علاقه در بندر جده است.
6. نتایج و بحث
در این بخش، مطالعه موردی مربوط به بندر جده واقع در پادشاهی عربستان سعودی معرفی شده است. این مطالعه موردی به این دلیل انتخاب شده است که گارد مرزی بندر جده تاکید کرده است که سیستم دوربین نظارت تصویری مستقر کنونی به دو دلیل اصلی کاملاً کارآمد نیست. اول از همه، قرار دادن دوربین ها در وضعیت فعلی آن انتظارات آنها را برآورده نمی کند، زیرا برخی از مناطق بندر دریایی وجود دارد که توسط دوربین های زیادی بارگیری می شود، در حالی که سایر نقاط به خوبی پوشش داده نمی شوند. ثانیاً، کل پوشش فعلی بندر جده حدود 50 درصد است، در حالی که هدف گارد مرزی دستیابی به پوشش نزدیک به 100 درصد با تعداد بهینه دوربین است.
در ادامه، متدولوژی اتخاذ شده برای به دست آوردن داده هایی که برای پیاده سازی رویکرد HybVOR ضروری هستند، ارائه شده است. سپس، نتایج بهدستآمده با استقرار شبکه دوربینهای نظارتی بر اساس رویکرد پیشنهادی ما برجسته میشوند. پس از آن، نتایج اجرای HybVOR مورد بحث قرار می گیرد.
6.1. مطالعه موردی: بندر دریایی جده
بندر جده مهمترین بندر در پادشاهی عربستان سعودی است. دارای موقعیت استراتژیک در وسط دریای سرخ است و در 21 درجه و 28 دقیقه عرض شمالی و 39 درجه و 10 دقیقه طول غربی واقع شده است. بندر جده به دو شهر مقدس مسلمانان مکه و مدینه در پادشاهی عربستان سعودی خدمت می کند (بندر دریایی جده، 2013). 10.5 کیلومتر مربع را اشغال می کند، با 58 اسکله آب عمیق که طول کلی آن 11.2 کیلومتر است و آبکشی آن به 16 متر می رسد [ 34 ]. شکل 17 یک نمای کلی از بندر دریایی جده و منطقه مورد مطالعه ما را نشان می دهد.
به منظور تهیه داده های مورد نیاز برای اجرای رویکرد HybVOR، یعنی: (1) یک مدل ارتفاعی دیجیتال (DEM)، (2) یک مدل سطح دیجیتال (DSM) و (3) یک مدل سه بعدی ساختمان ها، بررسی های توپوگرافی (مبتنی بر آن) بر روی ترکیبی از GPS، Total Station و Level) برای بدست آوردن داده های مکانی با دقت لازم برای طرح های بزرگ مقیاس (1:500) انجام شد.
مرحله اول شامل کاوش در حوزه مورد علاقه و انجام یک مطالعه اولیه از داده های مربوطه است که باید به دست آورید. پس از آن، 20 نقطه کنترل زمینی (GCPs) با دقت افقی 5 سانتی متر و دقت عمودی 3 سانتی متر تعریف شد. به منظور تعیین موقعیت پلانیمتری این GCPها، یک بررسی دیفرانسیل GPS در حالت استاتیک سریع برای 10 GCP انجام شد. برای 10 GCP دیگر، یک روش پیمایش با ایستگاه کل به دلیل کیفیت پایین سیگنال GPS اتخاذ شد. از نظر ارتفاع GCPs، از روش تسطیح مستقیم برای اندازه گیری اختلاف ارتفاع استفاده شد. سپس مقادیر مطلق ارتفاعات بر اساس نقطه مرجعی که ارتفاع مشخصی در منطقه مورد مطالعه ما دارد، محاسبه شد.
هنگامی که مختصات افقی و عمودی GCP ها مشخص شد، بررسی توپوگرافی دقیق عناصر در منطقه مورد مطالعه انجام می شود. این عناصر برای اجرای استقرار دوربین های نظارتی مطابق با رویکرد HybVOR مرتبط هستند. برای به دست آوردن جزئیات سه بعدی ساختمان ها، از یک ایستگاه کل بدون بازتاب (با برد 500 متر و دقت 3 میلی متر + 2 ppm) استفاده شد. این نوع توتال استیشن به دست آوردن جزئیاتی را که در محیط به سختی یا غیرقابل دسترسی هستند، تسهیل می کند. با توجه به جمعآوری دادههای ارتفاعی مربوط به زمین و خیابانها، از روش تسطیح غیرمستقیم با ایستگاه کل استفاده شد. یک شبکه منظم 5 متری برای داده های ارتفاعی زمین اتخاذ شده است زیرا زمین کاملاً همگن بود.
داده های ارتفاع مربوط به زمین برای تولید یک شبکه نامنظم مثلثی (TIN) که برای ایجاد یک DEM شطرنجی خدمت می کند، استفاده شد. جزئیات سه بعدی ساختمان ها مبنایی برای ایجاد یک مدل سه بعدی از منطقه مورد مطالعه است. چنین مدل سهبعدی نقش عمدهای در رویکرد HybVOR از نظر تولید نمودار Voronoï، تولید DSM، انجام viewshed مبتنی بر شطرنجی، و انجام تحلیل دید مبتنی بر بردار سهبعدی دارد.

شکل 17. نمای کلی بندر جده و منطقه مورد مطالعه (تصویر از نقشه گوگل).
6.2. نتایج
بر اساس بررسی های توپوگرافی، مجموعه ای از نقاط ارتفاعی زمین و یک بررسی دقیق سه بعدی از مسیرها و ساختمان ها به دست آمده است. سپس، این داده ها به ArcGIS صادر می شود تا رویکرد HybVOR ما برای قرار دادن شبکه دوربین و انجام تجزیه و تحلیل سطح مورد انتظار پوشش را پیاده سازی کند.
برای این منظور، اولین گام، تولید یک مدل ارتفاعی دیجیتال رستری (DEM) از مجموعه نقاط ارتفاعی زمین ساختار یافته در یک شبکه نامنظم مثلثی (TIN) است. سپس، ردپای ساختمانها از بررسی جزئیات سهبعدی تولید میشود و بر اساس ارتفاع ساختمان مربوطه، مقدار ارتفاع به هر ردپا اختصاص داده میشود. پس از آن، این ردپاها به فرمت شطرنجی تبدیل میشوند و با DEM ترکیب میشوند تا یک مدل سطح دیجیتال رستری (DSM) منطقه مورد نظر ایجاد شود. این DSM اساس محاسبه viewshed مبتنی بر شطرنجی ما است ( بخش 5.3 را ببینید). شکل 18 DEM و DSM را نشان می دهد که در محاسبه شطرنجی مبتنی بر شطرنجی ما استفاده شده است.

شکل 18. مدل دیجیتال ارتفاع (DEM) و مدل سطح دیجیتال (DSM) که برای محاسبه شطرنجی مبتنی بر شطرنجی استفاده می شود.
مرحله دوم شامل تولید نمودار Voronoï (در قالب برداری) بر اساس ردپای ساختمان است. سپس، یک شبکه دوربین بر اساس رویکرد HybVOR بر روی لبه های تقسیم شده Voronoï همانطور که در بخش 5.2 توضیح داده شد، قرار می گیرد . شکل 19 قرارگیری شبکه دوربین در منطقه مورد مطالعه ما را بر اساس رویکرد HybVOR نشان می دهد. توجه به این نکته مهم است که در تئوری، لبه های Voronoï تولید شده از چندضلعی ها باید به صورت منحنی سهمی ظاهر شوند. با این حال، به دلیل محدودیت ترسیمی نرمافزار GIS مورد استفاده، منحنیهای سهمی به بخشهای خط تقریب میشوند و این تقریب بر کیفیت ارزیابی پوشش تأثیری نخواهد داشت [ 35 ].
در مرحله سوم، نمای بر اساس DSM شطرنجی تولید شده و موقعیت دوربین ها محاسبه می شود. هدف اصلی این مرحله اطمینان از پوشش کامل شبکه راه ها توسط شبکه دوربین های نظارتی است. با توجه به ارتفاع دوربینها، این مربوط به بلندترین ساختمانی است که از این مکان نظارت میشود (به بخش 5.3 مراجعه کنید). شکل 20 سطح پوشش سطحی را نشان می دهد که با اعمال رویکرد HybVOR در منطقه مورد نظر به دست آمده است.

شکل 19. استقرار شبکه دوربین در منطقه مورد مطالعه بر اساس رویکرد HybVOR.
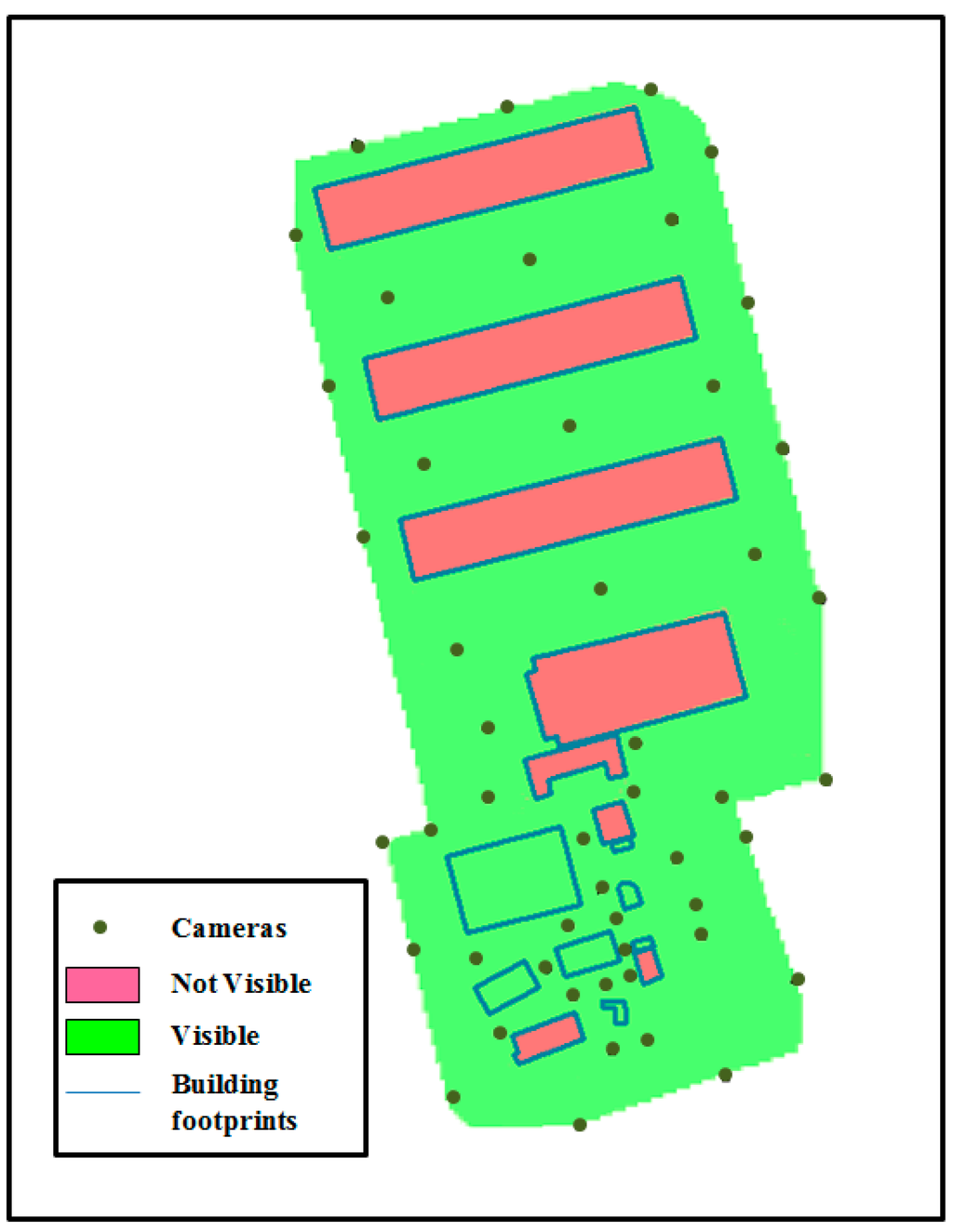
شکل 20. پوشش سطح تولید شده از DSM و محل دوربین های پیشنهادی.
آخرین مرحله در اجرای رویکرد HybVOR، انجام تحلیل دید مبتنی بر بردار سه بعدی است. هدف از این مرحله اطمینان از اینکه ورودی های اصلی ساختمان ها (درها، پنجره ها و غیره ) از محل پیشنهادی دوربین ها به طور کامل نظارت می شود. در مواردی که برخی از ورودیها کاملاً قابل مشاهده نیستند، موقعیت دوربینهای مربوطه بهمنظور بهبود دید به صورت دستی تغییر میکند (تغییرات جزئی که بر پوشش سطح تأثیر نمیگذارد انجام میشود). شکل 21 نتایج تحلیل دید مبتنی بر بردار سه بعدی ما بر اساس رویکرد HybVOR را نشان می دهد.
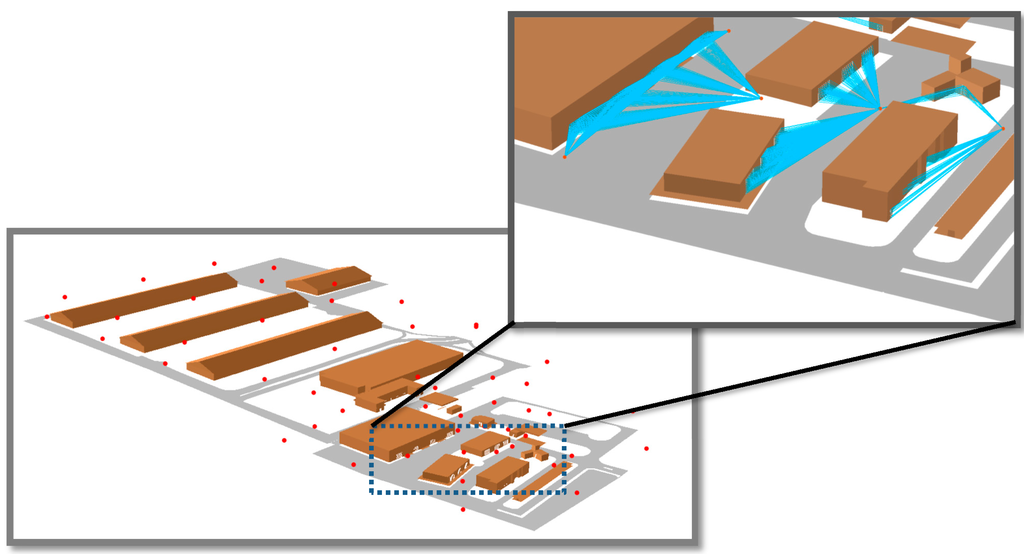
شکل 21. تحلیل دید مبتنی بر برداری سه بعدی بر اساس رویکرد HybVOR.
6.3. بحث
در این مطالعه موردی، رویکرد HybVOR به منظور یافتن قرارگیری بهینه شبکه دوربین در منطقه مورد علاقه در بندر دریایی جده اجرا شده است. مکان پیشنهادی دوربین ها بر اساس نمودار Voronoi است که از ردپای ساختمان ها ایجاد شده است. استفاده از نمودار Voronoi برای قرار دادن شبکه دوربین امکان تعیین تعداد بهینه دوربین برای پوشش تقریباً کامل را فراهم می کند. نتایج اجرای ما نشان می دهد که تعداد بهینه دوربین 48 دوربین در مساحت 0.1336 کیلومتر مربع است . پوشش سطحی تقریباً 100٪ بر اساس محاسبه شطرنجی مبتنی بر شطرنجی به دست می آید (سطح مناطق قابل مشاهده = 0.13 کیلومتر مربع ، سطح مناطق غیر قابل مشاهده = 0.036 کیلومتر مربع، که در آن مناطق غیر قابل مشاهده عمدتاً با سطوح برخی از ساختمان ها مطابقت دارند). سپس، تجزیه و تحلیل دید مبتنی بر بردار سه بعدی برای اطمینان از پوشش کامل ورودی ساختمان های اصلی توسط شبکه دوربین استفاده می شود.
ذکر این نکته ضروری است که تعداد دوربین ها به شدت به ویژگی های دوربین های مورد استفاده برای نظارت بر محیط بستگی دارد. رویکرد HybVOR این جنبه را از طریق پایگاه داده ای که برای ذخیره رابطه بین دوربین ها و ورودی ساختمان ها استفاده می شود در نظر می گیرد ( شکل 14 ). علاوه بر این، این پایگاه داده از استفاده از دوربین هایی با ویژگی های مختلف در یک شبکه پشتیبانی می کند.
در حال حاضر، رویکرد HybVOR پیادهسازیشده به مداخله دستی نیاز دارد تا از پوشش کامل ورودیهای ساختمانهای اصلی هنگام انجام تحلیل دید مبتنی بر بردار سهبعدی اطمینان حاصل شود. با این حال، میتوان این فرآیند را از طریق یک فرآیند مدلسازی مبتنی بر عامل (ABM) خودکار کرد. در این مورد، هر دوربین به عنوان یک عامل در نظر گرفته می شود، جایی که مکان اولیه را می توان از روش HybVOR استنباط کرد. سپس این عوامل (دوربینها) میتوانند با جابجاییهای جزئی، موقعیت خود را تغییر دهند تا هرگونه مشکل مربوط به عدم پوشش را برطرف کنند. قوانینی که این فرآیند ABM را محدود می کند، باید به رویکرد HybVOR احترام بگذارد. چنین بهبود رویکرد HybVOR موضوع کار تحقیقاتی آینده خواهد بود.
7. نتیجه گیری و کارهای آینده
در این مقاله، اصول یک رویکرد نوآورانه قرار دادن شبکه نظارت دوربین به نام “HybVOR” ارائه شده است. هدف این رویکرد ارائه بهترین مکان برای شبکه نظارت نظارتی، در عین بهینه سازی تعداد دوربین هایی است که قرار است مستقر شوند. ایده پشت HybVOR ایجاد نمودار Voronoi از ردپای ساختمان ها و استفاده از لبه های Voronoï برای قرار دادن دوربین های نظارتی است. سپس به منظور ارزیابی کیفیت پوشش شبکه، ترکیب شده است. (1) یک محاسبه شطرنجی مبتنی بر شطرنجی که از یک مدل سطح دیجیتال شطرنجی منطقه مورد مطالعه با (2) یک تجزیه و تحلیل مبتنی بر برداری سه بعدی از دید که بر یک مدل سهبعدی متکی است که ورودیهای اصلی ساختمانها را بررسی میکند، استفاده میکند.
نتایج بهدستآمده از نظر ارائه یک پوشش سطحی تقریباً کامل، در عین حال انتخاب مکانهای دوربینهایی که علاوه بر بهینهسازی تعداد دوربینهای مستقر، نظارت کاملی بر ورودیهای اصلی ساختمانها ارائه میدهند، بسیار جالب هستند. بررسیهای بیشتر ما بر حل جابهجایی خودکار دوربینها ناشی از روش پیشنهادی ما برای رفع هرگونه کمبود پوشش متمرکز خواهد بود. برای دستیابی به این هدف، یک مدل مبتنی بر عامل (ABM) توسعه خواهد یافت. هدف آن اتوماسیون فرآیند جابجایی بدون نیاز به مداخله دستی است، به ویژه هنگام انجام تحلیل دید مبتنی بر برداری سه بعدی. این ABM بر اساس قوانین و محدودیت هایی است که از اصول قرار دادن رویکرد HybVOR ناشی می شود.
در نهایت، ذکر این نکته ضروری است که رویکرد HybVOR برای نظارت بر سایر عناصر منظر شهری مانند حرکت ترافیک و نظارت بر مردم نیز مفید است. HybVOR یک روش مناسب برای قرار دادن دوربین ها برای نظارت بر مناطق با امنیت بالا است. علاوه بر این، رویکرد پیشنهادی ما ممکن است برای استقرار دوربینهای موبایلی که ممکن است بر روی پهپادها (وسایل نقلیه هوایی بدون سرنشین) نصب شوند، بسیار مؤثر باشد. پیکربندی چنین شبکه ای بسته به پویایی محیط، تعداد پهپادهای موجود و اهمیت اهداف خاص می تواند در پرواز انجام شود.
منابع
- فهر، د. فیوره، ال. پاپانیکولوپولوس، ن. مسائل و راه حل ها در قرار دادن دوربین های نظارتی. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2009 در مورد ربات ها و سیستم های هوشمند (IROS 2009)، سنت لوئیس، MO، ایالات متحده آمریکا، 10-15 اکتبر 2009. صص 3780–3785.
- جیکوبز، دبلیو. دوکروت، سی. De Langen، P. ادغام شهرهای جهان در شبکه های تولید: مورد شهرهای بندری. گلوب. شبکه 2010 ، 10 ، 92-113. [ Google Scholar ] [ CrossRef ]
- پکهام، سی. مروری بر امنیت دریایی و بندری. در مجموعه مقالات کنفرانس IEEE در سال 2012 در زمینه فناوریهای امنیت داخلی (HST)، والتهام، MA، ایالات متحده آمریکا، 13 تا 15 نوامبر 2012. ص 260-265.
- بوکا، ای. ویازو، اس. لونگو، اف. Mirabelli, G. توسعه سیستم های ترکیب داده اختصاص داده شده به کنترل امنیتی در تاسیسات بندری. در مجموعه مقالات کنفرانس شبیه سازی زمستانی 2005، اورلاندو، فلوریدا، ایالات متحده آمریکا، 4 تا 7 دسامبر 2005. ص 445-449.
- Ercan، AO; یانگ، دی بی. ال جمال، ا. Guibas، LJ قرار دادن بهینه و انتخاب گره های شبکه دوربین برای محلی سازی هدف. توزیع کنید. محاسبه کنید. سنسور سیستم 2006 ، 4026 ، 389-404. [ Google Scholar ]
- بودور، آر. درنر، آ. شریتر، پی. Papanikolopoulos، N. قرار دادن دوربین بهینه برای وظایف نظارت خودکار. جی. اینتل. ربات. سیستم 2007 ، 50 ، 257-295. [ Google Scholar ] [ CrossRef ]
- چن، سی. Li, YF قرارگیری حسگر خودکار برای دید ربات مبتنی بر مدل. IEEE Trans. سیستم مرد سایبرن. بخش ب: سایبرن. 2004 ، 34 ، 393-408. [ Google Scholar ] [ CrossRef ]
- الگوریتم های تقریب Ghosh، SK برای مسائل گالری هنری در چند ضلعی. گسسته. Appl. ریاضی. 2010 ، 158 ، 718-722. [ Google Scholar ] [ CrossRef ]
- کارانزا، جی. تئوبالت، سی. Magnor، MA; سیدل، اچ پی دیدگاه آزاد از بازیگران انسانی. ACM Trans. نمودار. 2003 ، 22 ، 569-577. [ Google Scholar ] [ CrossRef ]
- Cheung، KMG; بیکر، اس. Kanade، T. شکل از شبح اشیاء مفصلی و استفاده از آن برای تخمین سینماتیک بدن انسان و ضبط حرکت. محاسبات IEEE. Soc. Conf. محاسبه کنید. Vis. تشخیص الگو 2003 ، 1 ، 77-84. [ Google Scholar ]
- ویک، اس. Liedtke، تخمین سه بعدی سلسله مراتبی CE برای مدل های مفصلی بدن انسان از توالی داده های حجمی. در Robot Vision، مجموعه مقالات کارگاه بین المللی 2001 RobVis، اوکلند، نیوزلند، 16-18 فوریه 2001. Springer Berlin Heidelberg: برلین، آلمان، 2001; ص 27-34. [ Google Scholar ]
- احمد، ن. Kanhere, SS; Jha، S. مسئله حفره ها در شبکه های حسگر بی سیم: یک بررسی. ACM SIGMOBILE Mob. محاسبه کنید. اشتراک. Rev. 2005 , 9 , 4-18. [ Google Scholar ] [ CrossRef ]
- لیو، بی. تاوسلی، دی. مطالعه ای در مورد پوشش شبکه های حسگر در مقیاس بزرگ. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2004 در مورد سیستم های حسگر و Ad-hoc موبایل ، فورت لادردیل، FL، ایالات متحده، 25-27 اکتبر 2004. ص 475-483.
- O’rourke، J. گالری هنر قضایا و الگوریتم ها . انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، 1987. [ Google Scholar ]
- وانگ، YC; Tseng، YC طرح های استقرار توزیع شده برای شبکه های حسگر بی سیم سیار را برای اطمینان از پوشش چند سطحی. IEEE Trans. توزیع موازی سیستم 2008 ، 19 ، 1280-1294. [ Google Scholar ] [ CrossRef ]
- آدیکس، MD; بیلو، RE; نورمن، بی. بانرجی، اس. نناجی، BO; Rajgopal, J. بهینه سازی طرح بندی شبکه های ارتباطی بی سیم داخلی. IIE Trans. 2002 ، 34 ، 823-836. [ Google Scholar ]
- Raisanen، L. ویتاکر، آر.ام. هرلی، اس. مقایسه رویکردهای تصادفی و تکاملی برای بهینه سازی انتخاب سایت ایستگاه پایه. در مجموعه مقالات سمپوزیوم ACM 2004 در محاسبات کاربردی، نیکوزیا، قبرس، 14-17 مارس 2004. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2004; صص 1159–1165. [ Google Scholar ]
- اندرسون، منابع انسانی؛ McGeehan, JP بهینهسازی مکانهای ایستگاه پایه میکروسل با استفاده از تکنیکهای بازپخت شبیهسازی شده در مجموعه مقالات 1994 IEEE چهل و چهارمین کنفرانس فناوری خودرو، استکهلم، سوئد، 8 تا 10 ژوئن 1994. صص 858-862.
- آرگانی، م. مصطفوی، محمدرضا; اکبرزاده، و. گاگنه، سی. یااگوبی، ر. تأثیر کیفیت مدلهای سه بعدی شهر فضایی بر بهینهسازی مکانیابی شبکههای حسگر. Geomatica 2012 ، 66 ، 291-305. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. کائو، جی. La Porta، T. استقرار حسگر به کمک حرکت. IEEE Trans. اوباش محاسبه کنید. 2006 ، 5 ، 640-652. [ Google Scholar ] [ CrossRef ]
- اکبرزاده، و. گاگنه، سی. پاریزو، م. آرگانی، م. مصطفوی، کارشناسی ارشد مدل سنجش احتمالی برای بهینهسازی مکان سنسور بر اساس پوشش دید خط. IEEE Trans. ساز. Meas. 2013 ، 62 ، 293-303. [ Google Scholar ] [ CrossRef ]
- هوانگ، سی اف. Tseng، YC مشکل پوشش در یک شبکه حسگر بی سیم. اوباش شبکه Appli. 2005 ، 10 ، 519-528. [ Google Scholar ] [ CrossRef ]
- آرگانی، م. مصطفوی، محمدرضا; کریمی پور، ف. Gagné، C. برآورد و بهینه سازی پوشش شبکه حسگر بی سیم مبتنی بر GIS: یک رویکرد Voronoi. لکت. توجه داشته باشید. محاسبه کنید. علمی 2011 ، 6970 ، 151-172. [ Google Scholar ]
- اسلیپسچویچ، اس. Potkonjak، M. سازماندهی کارآمد انرژی شبکه های حسگر بی سیم. IEEE Int. Conf. اشتراک. 2001 ، 2 ، 472-476. [ Google Scholar ]
- تیان، دی. جورجاناس، ND یک طرح زمانبندی گره حفظ پوشش برای شبکههای حسگر بیسیم بزرگ. در مجموعه مقالات اولین کارگاه بین المللی ACM در مورد شبکه های حسگر بی سیم و کاربردها (WSNA 2002)، آتلانتا، GA، ایالات متحده آمریکا، 28 سپتامبر 2002. صص 32-41.
- بله، اف. ژونگ، جی. لو، اس. Zhang، L. PEAS: یک پروتکل قوی صرفه جویی در انرژی برای شبکه های حسگر با عمر طولانی. در مجموعه مقالات بیست و سومین کنفرانس بین المللی سیستم های محاسباتی توزیع شده، پراویدنس، RI، ایالات متحده آمریکا، 19 تا 22 مه 2003.
- دی فلوریانی، ال. Magillo، P. الگوریتمهای محاسبه دید در زمینها: یک بررسی. محیط زیست طرح. B طرح. دس 2003 ، 30 ، 709-728. [ Google Scholar ] [ CrossRef ]
- یانگ، پی پی. پوترا، سی. Li, W. Viewsphere: تحلیل دید سه بعدی مبتنی بر GIS برای ارزیابی طراحی شهری. محیط زیست طرح. B طرح. دس 2007 ، 34 ، 971-992. [ Google Scholar ] [ CrossRef ]
- راهنمای ArcGIS 10.1. استفاده از Viewshed و Observer Points برای تحلیل دید. در دسترس آنلاین: http://resources.arcgis.com/en/help/main/10.1/index.html#//00q90000008n000000 (در 27 آوریل 2015 قابل دسترسی است).
- اوکابه، ا. چکمه، بی. سوگیهارا، ک. Chiu, SN Spatial Tessellations: Concepts and Applications of Voronoi Diagrams , 2nd ed.; وایلی: چیچستر، انگلستان، 2000; پ. 671. [ Google Scholar ]
- نمودارهای فورچون، اس. ورونوی و مثلثسازیهای دلونی. محاسبه کنید. ژئوم اقلیدسی. 1992 ، 1 ، 193-233. [ Google Scholar ]
- نمودارهای Aurenhammer، F. Voronoi – بررسی یک ساختار داده هندسی اساسی. کامپیوتر ACM. Surv. 1991 ، 23 ، 345-405. [ Google Scholar ] [ CrossRef ]
- Dong, P. تولید و بهروزرسانی نمودارهای Voronoi با وزن ضربی برای ویژگیهای نقطه، خط و چندضلعی در GIS. محاسبه کنید. Geosci. 2008 ، 34 ، 411-421. [ Google Scholar ] [ CrossRef ]
- بندر اسلامی جده – اطلاعات و خدمات، اداره بنادر، پادشاهی عربستان سعودی. در دسترس آنلاین: http://www.ports.gov.sa/English/SAPorts/Jeddah/Pages/Services.aspx (در 11 ژوئن 2013 قابل دسترسی است).
- گونگ، ی. لی، جی. تیان، ی. لین، ی. Liu, Y. الگوریتمی مبتنی بر برداری برای تولید و بهروزرسانی نمودارهای ورونوی با وزن ضربی برای نقاط، چند خطوط و چندضلعیها. محاسبه کنید. Geosci. 2012 ، 42 ، 118-125. [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر