1. معرفی
رویدادهای مهم، مانند جشنواره های موسیقی یا بازی های فوتبال، ده ها هزار نفر را به خود جذب می کنند. متأسفانه، با وجود آمادگی بالای امنیتی، هر بار ممکن است تصادفات رخ دهد و عواقب آن اغلب به دلیل تعداد بالای بازدیدکنندگان بسیار مهم است. در ادبیات اخیر، شبیهسازیهای جمعیتی که میتوانند برای مسائل امنیتی در طول رویدادهای بزرگ مورد استفاده قرار گیرند، معمولاً مبتنی بر اطلاعات حسشده در زمان واقعی نیستند، بلکه بر اکتشافات تجربی یا فیزیکی تکیه دارند. یک نمای کلی از روشها و رویکردهای فعلی برای شبیهسازیهای جمعیت (به عنوان مثال، تخلیه) توسط [ 1 ] ارائه شده است. در مقایسه با آن، اطلاعات درجا بخش مهمی از رویکردهای ناوبری در زمینه رباتیک بوده است [ 2 ]. مطالعه اخیر هیلن و همکاران.بر ادغام اندازهگیریهای بیدرنگ در محل و از راه دور برای ایجاد تخمین واقعیتر حرکت افراد با استفاده از مدلسازی مبتنی بر عامل تمرکز دارد [ 3 ]. به جز استخراج اطلاعات موقعیت از داده های سنجش از دور نوری که توسط هیلن و همکاران انجام شده است. [ 3 ]، مطالعات در زمینه نظارت بر جمعیت نتایج امیدوارکننده ای را در تخمین تراکم و پویایی جمعیت ارائه می دهد [ 4 ، 5 ]. اطلاعات به دست آمده را می توان برای یک رویکرد مسیریابی برای رویدادهای بزرگ مورد استفاده قرار داد.
با این حال، سازماندهندگان رویداد و مقامات امنیتی معمولاً اطلاعات بسیار محدودی در مورد مکان بازدیدکنندگان در محل رویداد دارند، علیرغم ضریب نفوذ بالای گوشیهای هوشمند در عموم مردم [ 6 ]. سنسورهای زمینی، مانند دوربین های امنیتی، اغلب فقط در مهمترین نقاط در دسترس هستند و فقط میدان دید محدودی دارند. فناوری نظارت هوابرد اخیر قادر به ارائه تصاویر با وضوح بالا در زمان واقعی است [ 7 ]. به دلیل تحرک و میدان دید بزرگ، حتی سایت های رویداد بزرگ را می توان در چند دقیقه ثبت کرد. افزایش وضوح زمین تصاویر گرفته شده (به عنوان مثال، 9 سانتی متر؛ به شکل 1 مراجعه کنید ) امکان تشخیص کارآمد اشیاء مانند اتومبیل ها و افراد را فراهم می کند [ 8 ]].
در این مقاله، تصاویر هوایی بلادرنگ با دادههای حرکت گوشیهای هوشمند ترکیب شده و در یک ابزار مسیریابی برای رویدادهای مهم ادغام میشوند. طراحی شده است تا توسط مقامات رسمی استفاده شود (به عنوان مثال، پلیس یا آمبولانس) و همچنین خود بازدیدکنندگان. این میتواند برای جشنوارههای موسیقی در فضای باز، که در آن گروههای بزرگ میتوانند بهطور خودجوش در مکانهایی با نظارت کمتر جمع شوند، یا برای رویدادهای مراکز شهرها (مثلاً نمایشگاهها) استفاده شود، زیرا اغلب در مکانهای مختلف برگزار میشود. به عنوان مثال، در مورد جشنواره های موسیقی، حرکت جمعیت مستقیماً در مقابل صحنه کنسرت در طول اجرای زنده به سختی قابل پیش بینی است. اگرچه تعداد افراد در جمعیت ممکن است کمتر از حداکثر ظرفیت منطقه باشد، اما تعداد افراد در هر متر مربع (تراکم جمعیت) میتواند به سرعت به سطح بحرانی برسد و منجر به موقعیتهای خطرناک شود. اگر تراکم جمعیت از حد معینی بالاتر برود، وضعیت می تواند تهدید کننده زندگی شود و مسئولان باید مداخله کنند. اما حتی در سناریوهای کمتر دراماتیک، تصور هر فرد در این شرایط ممکن است متفاوت باشد. وضعیت جسمانی، سطح هیدراتاسیون، میزان مسمومیت، یا حتی شرایط آب و هوایی در یک رویداد، همگی می توانند عواملی باشند که بر تمایل فرد برای ترک یک منطقه شلوغ به سریع ترین شکل ممکن تأثیر می گذارد. ما فرض می کنیم که سریع ترین راه مترادف با مسیری با کمترین تراکم جمعیت است.
برای این موقعیتهای بحرانی و غیر بحرانی، ما یک مفهوم مسیریابی مبتنی بر ترکیب تصاویر هوایی نوری 9 سانتیمتری با دادههای حرکتی کاربران گوشیهای هوشمند در زمان تقریباً واقعی پیشنهاد میکنیم. هدف اصلی ارائه یک نقشه تراکم جمعیت به روز با عملکرد مسیریابی کم هزینه برای بازدیدکنندگان رویداد و همچنین برای نیروهای امدادی و مقامات امنیتی است.
2. روش ها
در این بخش، تخمین تراکم جمعیت مبتنی بر وصله خودکار و استخراج مسیر حرکت از دادههای حسگر تلفن همراه هوشمند توضیح داده شده است. علاوه بر این، نشان داده شده است که چگونه این دو نوع داده حسگر برای به دست آوردن یک لایه هزینه برای اهداف مسیریابی کمهزینه ترکیب میشوند.
2.1. تراکم جمعیت از تصاویر هوایی
در ادامه، فرآیند محاسبه خودکار نقشه چگالی جمعیت از روی تصاویر هوایی (“ردیاب جمعیت”) توضیح داده شده است. سپس این نقشه با استفاده از محاسبه مسیر کمترین هزینه مبتنی بر شطرنجی به یک برنامه مسیریابی فردی مبتنی بر مکان وارد می شود.
قبل از تمرکز بر محاسبه نقشه تراکم جمعیت، ویژگی های لازم سیستم دوربین هوایی را شرح می دهیم. سیستم مسیریابی باید در جشنواره های بزرگ با مساحت رویداد چند کیلومتر مربع کار کند. با وجود این منطقه بزرگ، نقشه تراکم باید همه مکان های شلوغ را پوشش دهد و باید به طور مرتب به روز شود. یکی از نیازهای اصلی برای تولید یک توصیه مسیریابی به روز، تحویل به موقع نقشه چگالی به سرور است. برای دستیابی به این هدف، یک سیستم پردازش با دوربین های هوایی و یک لینک داده یکپارچه باید تصاویر را به ایستگاه دریافت کننده روی زمین ارسال کند. پردازش شامل یک مرحله ارجاع جغرافیایی و راستیابی است که برای خود تشخیص جمعیت اجباری نیست، بلکه برای ادغام دادههای تصویر و مسیر ( بخش 2.3) است.). نویسندگان [ 9 ] سیستمی را با تولید ارتوفوتو روی برد و انتقال داده دو طرفه هوا به زمین توصیف می کنند. سیستم آنها به خوبی با سیستم مسیریابی ارائه شده در این مقاله کار می کند، اگرچه نصب سیستم پردازش می تواند روی زمین نیز قرار گیرد.
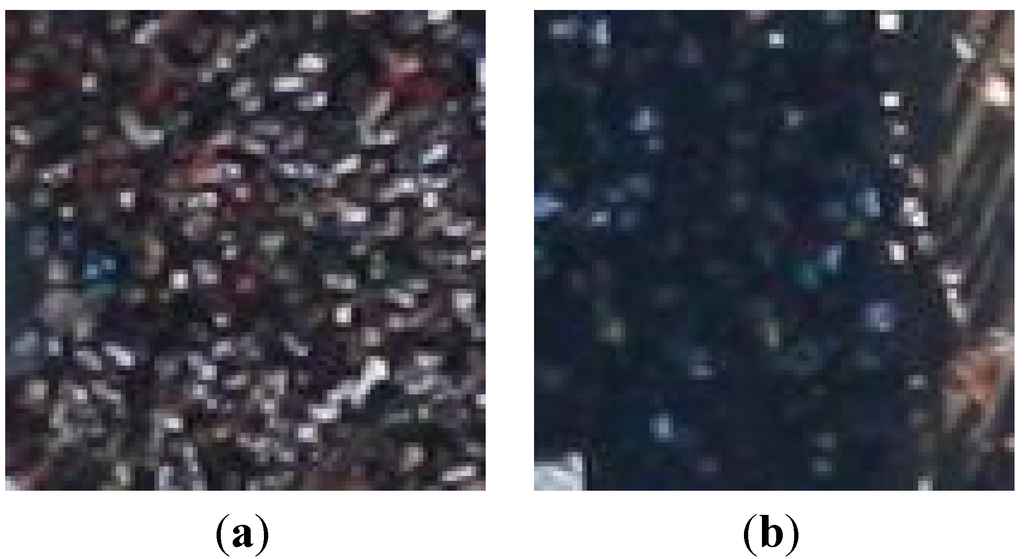
الزامات فوق الذکر از پوشش زیاد و فواصل کوتاه به روز رسانی نقشه چگالی منجر به مبادله بین میدان دید دوربین ها و وضوح فضایی می شود. از این رو، در این مطالعه از روش توصیف شده توسط کرز و همکاران استفاده می کنیم. [ 10 ] که قادر به تشخیص ازدحام در تصاویر هوایی با وضوح تقریبی 9 سانتی متر است. در این وضوح، یک فرد به صورت یک حباب کوچک تقریباً 5 × 5 پیکسل ظاهر می شود. در صحنه های بسیار شلوغ، این حباب ها به سختی قابل تشخیص هستند به دلیل انسداد و تغییر شرایط نوری. در این مورد، آنها در عوض یک بافت ناهمگن بدون هیچ جهت یا ساختار الگوی منظمی تشکیل می دهند ( شکل 1آ). علاوه بر این، ظاهر این بافت ها به طور مشخص بسته به پیکسل های پس زمینه و شرایط نور تغییر می کند ( شکل 1 ب).
برای غلبه بر این مشکلات از زنجیره ابزار تشخیص جمعیت پیشنهاد شده توسط Meynberg و همکاران استفاده می کنیم. [ 10 ]. این رویکرد، تکههای تصویری با اندازه ثابت را با یک بانک فیلتر گابور ترکیب میکند و از ترکیبی از پاسخهای فیلتر به عنوان بردار ویژگی ورودی برای یک ماشین بردار پشتیبانی (SVM) استفاده میکند. خوانندگان برای جزئیات توسعه به [ 10 ] ارجاع داده می شوند. در زمینه این مقاله، ما از اصطلاح “بافت جمعیت” برای توصیف منطقه تصویری استفاده می کنیم که در آن افراد بسیار نزدیک به یکدیگر قرار می گیرند و یک ساختار منسجم را تشکیل می دهند. اصطلاح “پچ جمعیت” به عنوان یک پچ حاوی این بافت جمعی تعریف می شود. ما اکنون مراحل اصلی پردازش روش آنها را خلاصه می کنیم، که تراکم فرد را در تصاویر هوایی تخمین می زند .دانش مورد نیاز است.
شکل 1. نمونه ای از دو تکه تصویر 100 × 100 پیکسلی حاوی جمعیت انسانی (با وضوح 9 سانتی متر). چالش های اصلی شرایط نوری متفاوت، پس زمینه های مختلف و انسداد متقابل است. ( الف ) تراکم جمعیت زیاد، انسداد زیاد. ب ) کنتراست کم.
2.1.1. تشخیص نقاط علاقه
هدف از این مرحله دوگانه است. اول، گوشه ها را شناسایی می کند و مختصات را به عنوان مکان های ممکن یک فرد ذخیره می کند، که مبنایی برای تخمین چگالی شرح داده شده در بخش 2.1.4 است، و دوم، فضای جستجوی فیلتر در بخش 2.1.2 را به طور قابل توجهی کاهش می دهد.. کاهش فضای جستجو به این دلیل است که در طول یک کمپین پروازی تعداد زیادی عکس گرفته میشود که هر تصویر وضوحی در حدود 18 مگاپیکسل دارد. با تصاویر اصلی به عنوان ورودی، خروجی های این مرحله مکان های پیکسلی ممکنی است که تعداد زیادی از افراد در آن قرار دارند. به دلیل گران بودن مراحل استخراج و طبقهبندی ویژگیها، فضای جستجو باید محدود به مناطق تصویر باشد که احتمال وجود تعداد زیادی از افراد در آنها وجود دارد. در تصاویر هوایی با وضوح 9 سانتی متر، یک نفر مانند یک حباب یا گوشه کوچک با اندازه تقریباً 5 × 5 پیکسل ظاهر می شود. بنابراین، یک آشکارساز گوشه ای توسط Rosten و Drummond [ 11] ابتدا روی کل تصویر اعمال میشود، که مکانهای بافتهای جمعی احتمالی را از نظر تئوری همه موقعیتهای پیکسل فقط به موقعیتهایی کاهش میدهد که به عنوان یک گوشه تشخیص داده میشوند و از این رو شرایط لازم برای در نظر گرفتن پردازش بیشتر را دارند. به این ترتیب، تعداد عملیات فیلتری که مطابق با بخش 2.1.2 انجام می شود را می توان با ضریب 1000 (بسته به محتوای تصویر) کاهش داد تا امکان استفاده در سناریوهای حساس زمانی فراهم شود.
2.1.2. یافتن نمایش وکتور ویژگی برای وصلههای تصویر جمعی
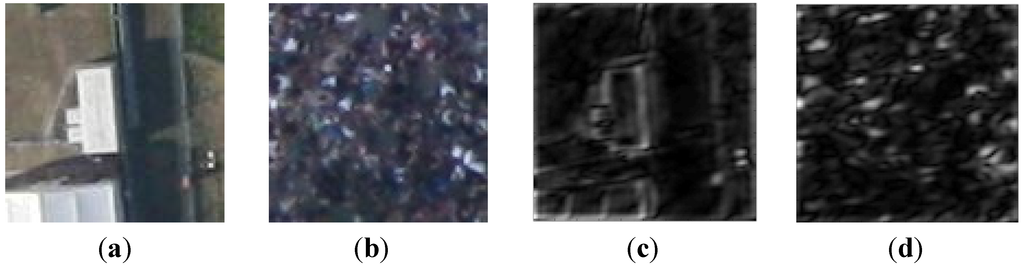
ورودی این مرحله آرایهای از تمام مکانهای پیکسل ممکن بافتهای جمعی است و خروجی مجموعهای از بردارهای ویژگی است که به خوبی بین وصلههای تصویر با شلوغی و وصلههای تصویر بدون شلوغی تمایز قائل میشود. در ادامه نحوه ایجاد چنین بردار ویژگی را شرح می دهیم. هر پچ تصویر منکمنکبا بانکی از فیلترهای گابور درگیر شده است. این فیلترها به ویژه برای نمایش بافت مناسب هستند، که اولین بار توسط Manjunath و Ma [ 12 ] معرفی شدند، زیرا هم جهت و هم مقیاس لبه ها را در یک بردار ویژگی کم بعدی رمزگذاری می کنند. تکه های تصویری با سازه های ساختمانی منظم ( شکل 2 الف) منجر به پاسخ قوی در زوایای جهت گیری خاص می شود ( شکل 2 ج). برعکس، یک پچ جمعیت ( شکل 2 ب) پاسخ بالایی در هر جهت می دهد ( شکل 2 د)، زیرا افراد هیچ الگوی منظمی را تشکیل نمی دهند. به این ترتیب، امکان ساخت بردارهای مشخصه موثر و متمایز برای کار طبقه بندی باینری که در ادامه می آید وجود دارد.
شکل 2. دو تصویر اصلی ( الف ) و ( ب ) با عکسهای پاسخ مربوطه ( ج ) و ( د ) پس از انطباق هر دو با فیلتر گابور. شکل فرعی (c) پاسخ ساختار منظم را در تصویر اصلی (a) نشان می دهد، در حالی که (d) پاسخ جمعیت بدون ساختار را در تصویر اصلی (b) نشان می دهد.
اجازه دهید من∈آرم× Nمن∈ℝم×نیک پچ تصویر در موقعیت پیکسل نامزد (x,y) باشد. تبدیل موجک گابور آن به این صورت تعریف می شود
جایی که gs ، k�س،کیک تابع فیلتر گابور است که در آن s و k به ترتیب مقیاس و زاویه جهت فیلتر را تعیین می کنند. بعد، برای هر ترکیب دبلیوs ، k( x ، y)دبلیوس،ک(ایکس،�)میانگین μs ، k�س،کو واریانس σs ، k�س،کمحاسبه شده و در بردار ویژگی نهایی انباشته می شوند f( من) ∈ آر2 اسک�(من)∈ ℝ2اسک:
با ککبودن تعداد جهت گیری ها و اساستعداد ترازوهای بانک فیلتر است.
2.1.3. طبقه بندی با ماشین بردار پشتیبانی غیر خطی
مجموعه تمام بردارهای ویژگی f( من)�(من)سپس به عنوان یک ماتریس به یک SVM با هسته تابع پایه شعاعی منتقل می شود. مقدار بازگشتی آن بردار امتیازهایی است که تعیین می کند آیا یک وصله تصویری به عنوان یک پچ جمعیت طبقه بندی شده است یا خیر.
2.1.4. تشخیص جمعیت: از طبقه بندی باینری تا تخمین چگالی پیوسته
اکنون فهرست مکان های احتمالی افراد ( بخش 2.1.1 ) و نتیجه طبقه بندی ( بخش 2.1.3)) ترکیب می شوند. از این به بعد، تنها مکانهای احتمالی افراد که در یک پچ تصویر طبقهبندی شده مثبت قرار دارند در نظر گرفته میشوند و برای محاسبه تابع چگالی احتمال با یک هسته گاوسی در دامنه تصویر استفاده میشوند. به این ترتیب، تخمین تراکم جمعیت را می توان به عنوان یک مقدار شدت بیان کرد. این مقدار را می توان به هر پیکسل از تصویر اصلی و نه تنها به مجموعه محدود و بسیار پراکنده ای از گوشه های شناسایی شده اختصاص داد. برای این منظور، مقدار تخصیص داده شده با تراکم جمعیت تایید شده که به سختی در یک سناریوی دنیای واقعی قابل اندازه گیری باشد، کالیبره نمی شود. با این حال، هنوز هم برای خدمت به عنوان یک تابع هزینه دو بعدی در این زمینه کافی است.
2.2. مسیر حرکت از داده های گوشی های هوشمند
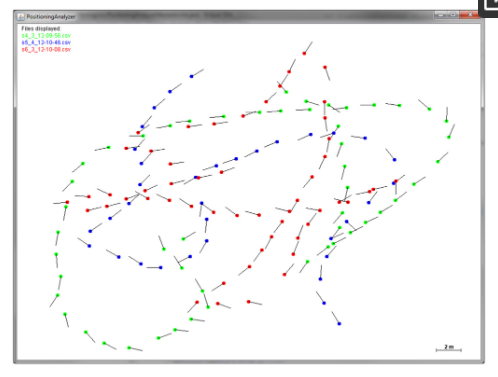
گام اولیه برای کار با دادههای حسگر گوشی هوشمند، اجرای برنامهای برای ضبط دادههای حسگر داخلی خاص از طریق API Android [ 13 ] است. برای این کار، موقعیت جغرافیایی فعلی کاربر گوشی هوشمند و جهت حرکت مربوطه به همراه سرعت حرکت تخمینی از حسگرهای مختلف گوشی هوشمند مانند سنسور شتاب، قطب نما و GPS/GNSS (سیستم ناوبری ماهواره ای جهانی) استخراج شده است. بر اساس تحقیقات قبلی، ما ادعا می کنیم که دقت موقعیت GPS/GNSS به ویژه برای رویدادهای مناطق روستایی و همچنین برای رویدادهای شهرهای کوچک و متوسط کافی است [ 3 ]. در شکل 3یک مجموعه داده نمونه از دادههای حرکت گوشی هوشمند ثبت شده (موقعیت جغرافیایی به اضافه جهت حرکت متناظر) از سه کاربر مختلف تلفن هوشمند تجسم شده است.
شکل 3. تجسم داده های حرکتی از سه کاربر مختلف تلفن هوشمند (سبز، آبی و قرمز) که از داده های حسگر داخلی از طریق API Android به دست آمده است. نقاط نماد موقعیت GPS/GNSS کاربر گوشی هوشمند است. خطوط به سمت جهت حرکت متناظر کاربر اشاره می کنند.
سرعت حرکت کاربر در مکان جغرافیایی خاص برای ارزیابی مجدد برآورد تراکم جمعیت مبتنی بر تصویر استفاده میشود. ما فرض می کنیم که سرعت حرکت بالا یک شاخص برای تراکم جمعیت کم است در حالی که سرعت حرکت آهسته نشان دهنده تراکم جمعیت زیاد است. راستوگی و همکاران مقایسه جامعی از سرعت راه رفتن عابر پیاده بر اساس ادبیات از سال 1967 تا 2007 انجام داد [ 14 ]. مقادیر میانگین سرعت برای بزرگسالان از 1.32 متر بر ثانیه تا 1.51 متر بر ثانیه متغیر است. علاوه بر این، هر مطالعه سرعت راه رفتن به طور قابل توجهی کمتری را برای افراد مسن (به طور کلی بالای 65 سال [ 15 ]) با 0.97 متر بر ثانیه تا 1.34 متر بر ثانیه نشان داد. علاوه بر این، [ 16] نشان داد که عابران پیاده در گروه ها کندتر هستند (1.54 متر بر ثانیه به تنهایی در مقایسه با 1.41 متر در ثانیه در گروه ها برای عابران جوان تر). بنابراین، شرایط مختلفی باید در مورد تجزیه و تحلیل سرعت حرکت در نظر گرفته شود. مخصوصاً برای رویدادهای بزرگ مهم است که مشخص شود آیا کاربر فقط به دلیل خاصی به آرامی حرکت می کند (مثلاً برای جستجوی پیراهن در غرفه تجاری یا خرید چیزی برای نوشیدن)، یا اینکه آیا کاربر واقعاً مجبور به حرکت است. به آرامی به دلیل تراکم جمعیت بالا. این ممکن است منجر به تفسیر نادرست از تراکم جمعیت بالا برای مناطق کمتر شلوغ شود.
برنامه تلفن هوشمند، داده های حرکتی خام را به پایگاه داده فضایی PostgreSQL/PostGIS در یک وب سرور با استفاده از اتصال اینترنت تلفن همراه منتقل می کند. پس از آن، مجموعه داده در یک GeoServer یکپارچه می شود تا از طریق خدمات نقشه وب (WMS) و سرویس ویژگی وب (WFS) توسط کنسرسیوم فضایی باز (OGC) قابل دسترسی باشد. بنابراین، داده ها را می توان در هر زنجیره پردازش یا برنامه ای از طریق وب ادغام کرد. بالاتر از آن، داده ها می توانند مستقیماً در پایگاه داده پردازش شوند یا می توانند در فرآیندهای سرویس پردازش وب OGC (WPS) ادغام شوند، که با توجه به تبدیل زیر از سرعت حرکت به اطلاعات تراکم جمعیت از اهمیت بالایی برخوردار است.
2.3. ترکیب اطلاعات
تخمین تراکم جمعیت مبتنی بر تصویر و اطلاعات چگالی که از دادههای حرکت گوشیهای هوشمند به دست میآید، پس از آن برای ایجاد یک لایه هزینه برای ناوبری کمهزینه، ترکیب میشوند. برای این منظور از سیستم اطلاعات جغرافیایی GRASS GIS [ 17 ] استفاده می شود. GRASS GIS برای این کار بسیار مناسب است زیرا الف) مبتنی بر شطرنجی است و ب) توسط پیادهسازی پایتون استاندارد OGC WPS به نام pyWPS [ 18 ] پشتیبانی میشود. این امکان را برای پردازش بلادرنگ تصویر هوایی و داده های گوشی هوشمند مبتنی بر وب در آینده فراهم می کند.
لایه چگالی به دست آمده از داده های تصویر هوایی به عنوان یک لایه پایه برای فرآیند مسیریابی کم هزینه مبتنی بر شطرنجی عمل می کند. برای این منظور، لایه به محدوده بین 0.43 (بدون چگالی) و 7.1 (چگالی بالا) طبقه بندی می شود. فروین این مقادیر (الف) 0.43 نفر در هر متر مربع ( p/m2 ) و ( ب ) 7.1 p/m2 را به عنوان تراکم جمعیت با (الف) سرعت پیادهروی معمولی و (ب) هیچ حرکتی شناسایی کرد [ 19 ] ]. فراتر از آن، فروین کاهش سرعت راه رفتن را در 2.0 p/m2 ، تماس غیرارادی بین افراد در 3.57 p/m2 و نیروهای بالقوه خطرناک جمعیت را بررسی کرد که از 5.55 p/m2 شروع میشدند .، که آستانه های مهمی برای ارزیابی بیشتر اطلاعات تراکم جمعیت هستند [ 19 ]. ویدمن رابطه بین سرعت محلی و تراکم محلی افراد را نیز بررسی کرد و آن را به صورت رسمی بیان کرد:
جایی که vمن�منسرعت در یک چگالی معین است، vاف، اف�اف،�حداکثر سرعت در آزادی کامل (1.34 متر بر ثانیه) است. γ�یک پارامتر برازش تجربی مشتق شده است (1.913 p/m2 ) ، D�تراکم جمعیت در p/m 2 است و Dm a x�مترآایکستراکم جمعیتی است که در آن دیگر هیچ حرکتی امکان پذیر نیست (5.4 p/m2 ) [ 20 ] . ویرز و همکاران یک مطالعه تجربی بر اساس اندازه گیری های گوشی های هوشمند برای تأیید این رابطه انجام داد [ 21 ]. بر اساس رابطه (3)، تراکم جمعیت را می توان با استفاده از داده های گوشی هوشمند تخمین زد
برای هر سرعت محلی vمن�منبا گوشی هوشمند ضبط شده است. این اطلاعات چگالی مبتنی بر تلفن هوشمند به GRASS GIS نیز وارد میشود و از فرمت برداری به شطرنجی تبدیل میشود تا با اطلاعات حاصل از دادههای تصویر ترکیب شود. برای این کار، نقطه (اکنون پیکسل مربوطه) اندازه گیری گوشی هوشمند گسترش می یابد تا اطلاعاتی را برای ناحیه اطراف کاربر تلفن هوشمند نیز ارائه دهد. بنابراین، تراکم افراد محاسبه شده با معادله (4) برای همسایگی محلی فرد آزمون نیز اتخاذ می شود. این به جای استفاده از اندازه گیری نقطه برای افزایش چگالی واقعی تر است. در غیر این صورت، چگالی در پیکسل های کنار اندازه گیری کاملاً متفاوت خواهد بود.
بر اساس اطلاعات تکمیل شده چگالی، یک لایه حداقل هزینه را می توان با استفاده از تابع GRASS GIS r.cost محاسبه کرد . نقطه اولیه برای این محاسبه، موقعیت جغرافیایی فعلی کاربر است. هزینه تجمعی حرکت از این نقطه به هر سلول محاسبه و در لایه هزینه حاصل ذخیره می شود. در نهایت، مسیر کم هزینه بین یک نقطه دلخواه و مکان فعلی کاربر را می توان با استفاده از تابع r.drain محاسبه کرد .
3. سناریوهای کاربردی
در ادامه، دو سناریو آزمایشی مشخص شده است که در آنها رویکرد مسیریابی بلادرنگ ما سودمند است. سناریوی اول ابزاری را برای فرار از موقعیتهای اضطراری توصیف میکند، در حالی که سناریوی دوم یک برنامه پشتیبانی تصمیم عمومی را ارائه میکند که میتواند در موقعیتهای متعدد مورد استفاده قرار گیرد. اصل «دادن و بگیر» برای همه برنامهها ضروری است، به این معنی که هم شرکتکننده و هم برگزارکننده باید اطلاعاتی را برای دریافت نتیجه ارائه دهند. این به طور مشخص برای سناریوهای ما به این معنی است که شرکت کنندگان در رویداد باید اطلاعات مکان و سرعت فعلی خود را از طریق تلفن هوشمند ارسال کنند و سازمان دهنده باید یک سیستم تصویربرداری هوایی را که منطقه رویداد را پوشش می دهد ارائه دهد. تنها در صورتی که اطلاعات هر دو طرف در دسترس باشد، می توان نتایج را به دلخواه ارائه کرد.
3.1. سریعترین راه خروج از جمعیت
یکی از برنامههایی که میتوان در آن از ناوبری بلادرنگ استفاده کرد، در جشنوارههای موسیقی است. جمعیت در مقابل صحنه های موسیقی اغلب بسیار متراکم است. همراه با شرایط آب و هوایی شدید (به عنوان مثال، درجه حرارت بالا) و خستگی فیزیکی، ممکن است منجر به موقعیت های خطرناک شود. در چنین جمعیتی فرصتی وجود ندارد که یک دید کلی از وضعیت داشته باشید و بهترین راه را پیدا کنید، مخصوصاً برای افرادی که قد پایینی دارند. به دلیل عدم جهت گیری، فرد ممکن است به سمت منطقه متراکم تر در میان جمعیت برود، بدون اینکه بداند یک فضای آزاد ممکن است خیلی نزدیک باشد.
رویکرد مسیریابی ما را می توان در یک برنامه اضطراری ارائه شده توسط سازمان دهنده رویداد ادغام کرد. مهمانان باید مکان فعلی و سرعت اندازه گیری شده با گوشی هوشمند خود را ارائه دهند. در ازای آن، آنها می توانند یک نقشه کلی را با توزیع جمعیت فعلی در منطقه رویداد مشاهده کنند و می توانند از ناوبری اضطراری توصیف شده استفاده کنند ( شکل 4).). علاوه بر این، نیروهای امنیتی و نجات رویداد می توانند مستقیماً موقعیت بازدیدکننده را هنگام استفاده از برنامه دریافت کنند. بنابراین، کمک می تواند خیلی زودتر در محل باشد. نقشه نمای کلی باید توسط سازمان دهنده با ثبت تصاویر هوایی در طول رویداد (به عنوان مثال، با هلیکوپتر، هواپیماهای بدون سرنشین یا موارد مشابه) ارائه شود. حتی ممکن است دوربینهای SLR معمولی در موقعیتهای بالا نصب شوند تا مناطق خاصی را پوشش دهند، مثلاً فضای جلوی صحنههای موسیقی.
شکل 4. نمایش شماتیک یک برنامه تلفن هوشمند اضطراری. تراکم جمعیت در پسزمینه تجسم میشود. سریعترین مسیر فرار با یک فلش قرمز تاکید شده است.
3.2. سریعترین راه برای رسیدن به نقطه مورد علاقه (POI)
رویکرد مسیریابی بلادرنگ را می توان با هر رویدادی که داده های تصویری مناسبی برای سایت رویداد در دسترس دارد، تطبیق داد. در ادامه این فرض برای مثال بازی های فوتبال تاکید می شود. در این مورد خاص، جمعیت انبوهی در بازههای زمانی کوتاه جمع میشوند (به عنوان مثال، قبل یا بعد از بازی و همچنین در زمان استراحت بین نیمه). یک مثال عینی برای این موضوع توسط مقامات بوروسیا پارک در مونشن گلادباخ (آلمان) گزارش شده است. پس از پایان بازیهای فوتبال، معمولاً راه اصلی به سمت پارکینگها توسط پلیس مسدود میشود تا هواداران تیم حریف را تا اتوبوسهایشان بدرقه کنند. در این بین، بسیاری از مردم باید منتظر بمانند در حالی که تعداد بیشتری از مردم از ورزشگاه به سمت پارکینگ ها خارج می شوند. برگزارکنندگان سعی میکنند با باز کردن دروازههایی که به مردم اجازه میدهد مسیر طولانیتری را در طرف مقابل ورزشگاه را طی کنند، از عوارض جلوگیری کنند. در این شرایط، این راه در مقایسه با انتظار در جمعیت متراکم بسیار سریعتر خواهد بود. با این حال، افرادی که در حال خروج از ورزشگاه هستند اغلب از (1) محاصره توسط پلیس و (2) گزینه استفاده از یک راه جایگزین آگاه نیستند.
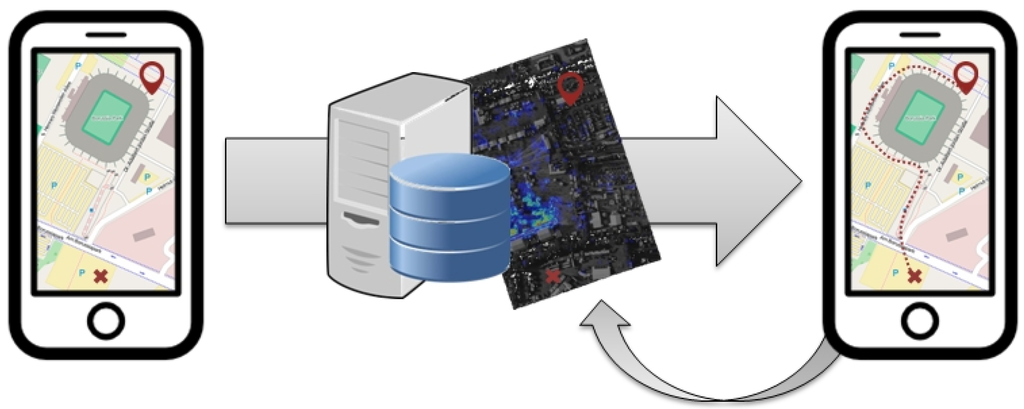
رویکرد مسیریابی ما میتواند با اطلاعرسانی و پیمایش برخی بازدیدکنندگان به مسیر جایگزین به کاهش این وضعیت کمک کند. شکل 5گردش کار عمومی را نشان می دهد که در آن کاربر باید مکان فعلی خود را همراه با هدف مسیریابی ارائه دهد. این اطلاعات به یک وب سرور ارسال می شود که در آن محاسبه واقعی برای مسیر کم هزینه انجام می شود. مسیر به دست آمده پس از آن در گوشی هوشمند کاربر به تصویر کشیده می شود که دائماً (به طور خودکار در پس زمینه برنامه) موقعیت و سرعت خود را گزارش می دهد. برای این مثال، یکپارچه سازی داده های گوشی هوشمند تا حد امکان برای جلوگیری از پارازیت های احتمالی ناشی از خود سیستم ضروری است. به محض اینکه مسیر جایگزین نیز شلوغ شد، سیستم باید با دقت تصمیم بگیرد که کدام جهت را انتخاب کند. اگر راه اصلی دوباره باز شود و جمعیت از بین برود، سیستم ناوبری مردم را در مسیر معمولی هدایت می کند. بدین ترتیب،
به طور کلی، ناوبری بلادرنگ بر اساس رویکرد مسیریابی ما می تواند در طول هر رویداد مهمی استفاده شود. به عنوان مثال برای رسیدن به نزدیکترین مغازه نوشیدنی در طول یک جشنواره موسیقی یا رویداد شهری. حتی پیمایش در خیابانهای شهر تا یک گاراژ پارکینگ خاص با تاکید بر اجتناب از ازدحام زیاد (مثلاً جلوی صحنهها یا غرفهها) میتواند مفید باشد. در هر صورت، مزیت ها از هر دو طرف برای برگزارکنندگان رویداد و مهمانان است. مهمانان از یک طرف از این ابزار برای جلوگیری از استرس، هیجان بیش از حد و عصبانیت استفاده می کنند، در حالی که از طرف دیگر برگزار کنندگان می توانند امنیت را در طول رویداد تضمین کنند و با ارائه یک برنامه ناوبری مدرن تلفن های هوشمند، جذابیت رویداد را افزایش دهند. علاوه بر این،
شکل 5. طراحی مفهومی یک برنامه گوشی هوشمند برای مسیریابی با کمترین هزینه در طول یا بعد از یک رویداد بزرگ (در این مورد یک بازی فوتبال).
4. اجرای نمونه اولیه
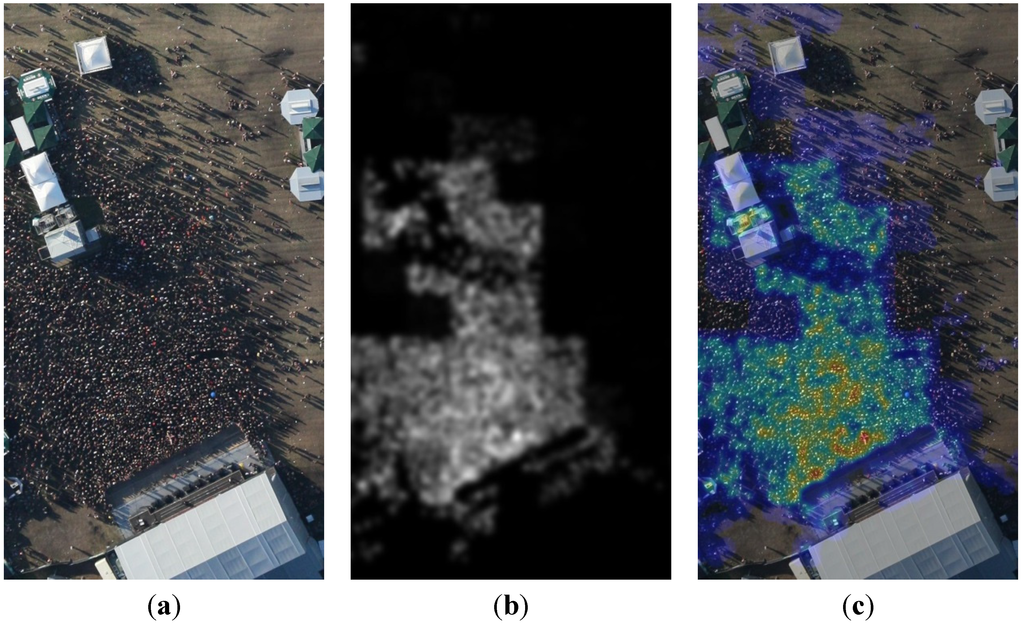
یک پیادهسازی نمونه اولیه بر اساس دادههای غیرواقعی به عنوان اثبات کلی مفهوم برای ادغام دو منبع داده انجام میشود: سنجش از راه دور و دادههای تلفن هوشمند. داده های آزمایشی برای نمونه اولیه در طول جشنواره موسیقی Wacken در سال 2013 ثبت شده است ( شکل 6 a). به وضوح می توان جمعیت انبوهی را دید که جلوی صحنه ها ایستاده اند. ابتدا، تراکم جمعیت با استفاده از یک پیاده سازی سریع C++ چند هسته ای تخمین زده می شود. به طور متوالی، داده های گوشی هوشمند باید ثبت شده و برای تجزیه و تحلیل به سرور وب منتقل شوند. این امکان را برای اجرای بلادرنگ این مفهوم در آینده فراهم می کند. در نهایت، محاسبه مسیر کمهزینه با ترکیب هر دو منبع داده در GRASS GIS انجام میشود.
4.1. تخمین تراکم جمعیت در تصاویر هوایی – جزئیات پیاده سازی
مرحله تخمین چگالی به تصاویر هوایی پانکروماتیک با وضوح فضایی حدودا نیاز دارد. 9-20 سانتی متر از آنجایی که ادغام با داده های مکان به تصاویر جغرافیایی ارجاع داده شده و تصحیح شده نیاز دارد، یک ماژول تصحیح راستا در زمان واقعی هر تصویر هوایی را قبل از شروع تخمین تراکم جمعیت پردازش می کند. در این سناریوی بحرانی زمانی، ما یک پیادهسازی تصحیح و ارجاع جغرافیایی سریع با پشتیبانی از GPU را انتخاب میکنیم [ 9 ]، که یک تصویر معمولی 18 مگاپیکسلی را در کمتر از 200 میلیثانیه پردازش میکند. از یک مجموعه پارامتر داخلی استفاده می کند که قبل از کمپین پرواز با تنظیم بسته خود کالیبره تعیین شده است. این سیستم مجهز به یک واحد IGI AEROcontrol GPS/IMU است [ 22]، که پارامترهای جهت گیری خارجی را برای هر تصویر با دقت زاویه ای کافی ثبت می کند. به این ترتیب، هیچ نقطه کنترل زمینی مورد نیاز نیست، که یک واقعیت مهم در این سناریوی بلادرنگ است. علاوه بر این، مرحله طرح ریزی از یک مدل ارتفاعی دیجیتال ماموریت توپوگرافی رادار شاتل (SRTM) برای استخراج مختصات جهان سه بعدی از مختصات تصویر استفاده می کند. وضوح 25 متر و کوانتیزاسیون 16 بیتی دارد.
تخمین تراکم جمعیت واقعی، متشکل از چهار مرحله شرح داده شده در بخش 2.1 ، تصویر تصحیح شده را به عنوان ورودی می گیرد ( شکل 6 a)، پاسخ فیلتر وصله ها را در مکان های امیدوار کننده محاسبه می کند، و پاسخ های فیلتر را به دو کلاس “crowd” طبقه بندی می کند. “و “بدون جمعیت.” بر اساس یادگیری نظارت شده، مرحله طبقه بندی با SVM نیاز به آموزش اولیه دارد. برای این منظور، SVM با تقریباً 10000 وصله تصویر آموزش داده شده است. هر کدام دارای ابعاد 64 در 64 پیکسل هستند. به طور مشخص، برای آموزش، یک پچ با 24 فیلتر گابور، متشکل از مقیاس S = 4 و جهت K = 6 در هم می پیچد (به بخش 2.1.2 مراجعه کنید.برای جزئیات). هر فیلتر دارای عرض 48 پیکسل است. 24 مقدار میانگین و 24 واریانس حاصل از هر پاسخ فیلتر سپس به عنوان بردار ویژگی 48 بعدی نهایی استفاده می شود که نشان دهنده یک پچ تصویر و ورودی برای آموزش SVM است. البته آموزش محاسباتی شدید را می توان به صورت آفلاین انجام داد.
شکل 6. تصویر ( الف ) زیرمجموعه ای از یک تصویر هوایی پردازش نشده از یک جشنواره موسیقی را نشان می دهد که جمعیت انبوهی در مقابل یک صحنه ایستاده اند. تصویر ( b ) لایه تراکم جمعیت محاسبه شده به عنوان یک تصویر خاکستری است (سیاه = چگالی کم، سفید = چگالی زیاد). برای اهداف تصویری، ما یک تصویر ترکیبی ( c ) ایجاد کردیم، که در آن چگالی بر روی تصویر اصلی قرار میگیرد (آبی = چگالی کم، قرمز = چگالی بالا).
در طول رویداد، در شرایط بلادرنگ، فیلتر کردن به صورت موازی روی چندین وصله با استفاده از C++ با OpenMP انجام میشود. پس از آن، کتابخانه کارآمد libSVM قادر است نتایج را تقریباً بلافاصله تولید کند. در نهایت، فیلتر گاوسی بعدی ( بخش 2.1.4 ) یک تصویر 8 بیتی با مقدار خاکستری به همان اندازه تصویر ورودی اصلی تولید می کند، که در آن مقدار شدت صفر با تراکم جمعیت بسیار کم و مقدار 255 مطابقت دارد. به بالاترین تراکم جمعیت اندازه گیری شده ( شکل 6 ب). شکل 6c اطلاعات چگالی محاسبه شده را از کم (آبی) تا زیاد (قرمز) با تصویر قائمشده در پسزمینه نشان میدهد. این تصویر به عنوان رابط با سیستم GRASS GIS عمل می کند و مبنایی را برای مسیریابی با کمترین هزینه فراهم می کند.
4.2. محاسبه مسیر کمترین هزینه با استفاده از GRASS GIS
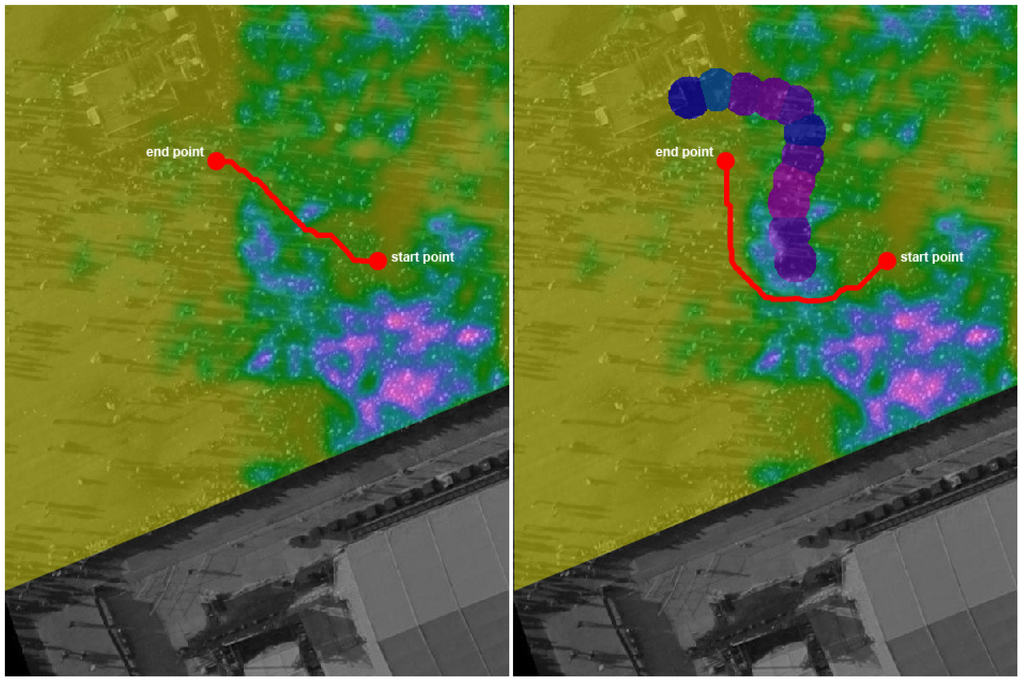
لایه چگالی و اطلاعات گوشی هوشمند به GRASS GIS وارد می شوند تا کمترین هزینه را محاسبه کنند. در مرحله اول، یک لایه هزینه تجمعی بر اساس مکان فعلی کاربر با استفاده از r.cost ایجاد می شود. برای اهداف آزمایشی، موقعیتی در جلوی مراحل در یک منطقه بسیار شلوغ در نظر گرفته شده است. پس از آن می توان از هزینه های تجمعی برای حرکت به یک نقطه تعریف شده یا برای حرکت به سمت منطقه ای کم تراکم خارج از جمعیت استفاده کرد. برای مورد دوم، یک نقطه در یک منطقه کم تراکم باید با استفاده از، به عنوان مثال، نزدیکترین عملکرد نقطه شناسایی شود. اگر مقصد مسیریابی مشخص باشد، مسیر کم هزینه را می توان با استفاده از r.drain محاسبه کرد . یک نتیجه نمونه را می توان در تصویر سمت چپ شکل 7 مشاهده کرد.
شکل 7. نتیجه مسیرهای کمهزینه (خط قرمز) بر اساس لایه هزینه اصلی که فقط از تصویر هوایی ( سمت چپ ) و با اطلاعات هزینه اضافی (دایرهها) به دست آمده از دادههای حسگر تلفن هوشمند ( سمت راست ) به دست آمده است. پس زمینه از دو لایه هزینه بر روی صحنه تصویر هوایی مربوطه تشکیل شده است. یکی از صحنه های اصلی جشنواره موسیقی در سمت راست پایین هر دو تصویر قرار دارد.
پس از آن، هزینه های به دست آمده از داده های گوشی هوشمند با لایه هزینه به دست آمده از تصاویر هوایی ترکیب می شود. از آنجایی که اطلاعات هوایی ممکن است منسوخ شده باشد، دادههای تلفن هوشمند نشاندهنده تراکم جمعیت بالایی است که مسیر اصلی (تصویر سمت چپ در شکل 7 ) در آن قرار دارد. بنابراین، یک مسیر کم هزینه به روز شده بر اساس اطلاعات هزینه جدید محاسبه می شود (تصویر سمت راست را در شکل 7 ببینید). مشاهده می شود که مسیر برای کاربر نسبت به نتیجه نشان داده شده در تصویر سمت چپ به دلیل اطلاعات هزینه اضافه حاصل از داده های حرکت گوشی هوشمند به طور قابل توجهی تغییر کرده است. به جای دور شدن از جمعیت متراکم، که رفتار معمولی است (به عنوان مثال، در یک موقعیت استرس)، محاسبه جدید نشان می دهد که کاربر به سمت راست از میان جمعیتی با تراکم متوسط حرکت می کند تا خیلی سریعتر به یک فضای آزاد برسد.
5. نتیجه گیری و چشم انداز
در این مقاله، ما یک ناوبری کمهزینه را بر اساس ادغام دادههای تصویر هوایی بلادرنگ و دادههای حسگر گوشیهای هوشمند پیشنهاد کردیم. داده های تصویر برای تخمین نقشه تراکم جمعیت گسترده استفاده می شود. برای این منظور، یک رویکرد مبتنی بر پچ با یک بانک فیلتر گابور برای طبقهبندی بافت در ترکیب با آشکارساز نقطه بهره و یک تابع هموارسازی اعمال میشود. اطلاعات مکان GPS/GNSS و سرعت حرکت فعلی کاربر با یک برنامه گوشی هوشمند جمع آوری می شود. پس از آن، تراکم جمعیت در محل بر اساس اطلاعات گوشی هوشمند تخمین زده می شود و امکان افزایش اطلاعات تراکم کلی را فراهم می کند. در نهایت، یک مسیریابی کمهزینه بر اساس اطلاعات چگالی تشکیلشده با استفاده از GRASS GIS انجام میشود.
دو کاربرد ممکن برای ادغام رویکرد ناوبری ما ارائه شده است. برنامه اضطراری می تواند از افرادی که می خواهند به سرعت از یک جمعیت متراکم فرار کنند (به عنوان مثال، در طول یک جشنواره موسیقی) پشتیبانی می کند. بالاتر از آن، رویکرد مسیریابی به طور کلی می تواند در موقعیت های مختلف کمک کند، به عنوان مثال پس از یک بازی فوتبال که در آن مسیرهای خاصی توسط پلیس مسدود می شود.
برای بهرهبرداری از مزایای واقعی رویکرد کمهزینه، لازم است که بتوان آن را در زمان واقعی انجام داد. این بدان معنی است که در اولین قدم، اطلاعات از هر دو منبع داده (تصویر و تلفن هوشمند) باید در زمان واقعی قابل دسترسی باشد. این را می توان از طریق استانداردهای موجود OGC مانند WMS، WFS یا سرویس پوشش وب (WCS) به دست آورد. علاوه بر این، پردازش داده ها و محاسبه لایه هزینه و همچنین برآورد مسیر کم هزینه باید در زمان واقعی در دسترس باشد. با استفاده از GRASS GIS، تمام مراحل پردازش ارائه شده در این مقاله را می توان در یک زیرساخت مبتنی بر وب ادغام کرد تا امکان استفاده واقعی در زمان واقعی به عنوان یک برنامه ناوبری را فراهم کند.
در مجموع می توان گفت که مزایای رویکرد ما دوچندان است، هم برای برگزارکنندگان رویداد و هم برای شرکت کنندگان در رویداد. مهمانان می توانند از این ابزار برای جلوگیری از استرس، هیجان بیش از حد یا عصبانیت استفاده کنند، در حالی که برگزارکنندگان می توانند سطح امنیتی رویداد را بالا ببرند و همزمان با ارائه یک برنامه ناوبری تلفن هوشمند مدرن، جذابیت آن را افزایش دهند. علاوه بر این، نیروهای امنیتی و امدادی می توانند از برنامه برای تلاش های خود استفاده کنند و می توانند سریعتر به محل اضطراری برسند.
کار آینده، اجرای بیدرنگ رویکرد مسیریابی ما با گردآوری تصاویر هوایی و دادههای حرکت گوشیهای هوشمند در زمان واقعی در طول یک رویداد بزرگ خواهد بود. علاوه بر این، انتقال از مسیریابی به ناوبری با توجه به سناریوهای کاربردی ارائه شده باید موضوع تحقیقات آینده باشد.




بدون نظر