1. معرفی
در این مقاله ما یک سیستم مدل سازی سیار نیمه اتوماتیک برای ایجاد نقشه های ساختمانی را پیشنهاد می کنیم. به طور خاص، ما به مشکل ساختن نقشه های ساخته شده از خانه های مسکونی می پردازیم. در این سناریو، نقشه های ساختمانی دقیق و زیبایی شناختی بسیار مطلوب است. صاحبان خانه برای بازسازی خانه یا چیدمان مبلمان جدید به مدل سازی متریک دقیق فضاهای خانگی نیاز دارند. به طور مشابه، آژانسهای املاک به اندازهگیریهای داخلی با کیفیت بالا، اغلب با الزامات کیفی که توسط یک نهاد نظارتی تعریف میشود، نیاز دارند.
در حالی که پیشرفت در اسکن لیزری (به عنوان مثال، مورا و همکاران [ 1 ] و اوساو و همکاران [ 2 ])، دوربین های عمق کم هزینه (مانند هنری و همکاران [ 3 ] و خوشلهام و البرینک [ 4 ]) و تصاویر روش های فتوگرامتری مبتنی بر (به عنوان مثال، Colburn و همکاران . [ 5 ] و کابرال و فوروکاوا [ 6 ]]) بازسازی سه بعدی داخلی را در دسترس تر می کنند، چنین روش هایی اغلب به تجهیزات گران قیمت، اپراتورهای آموزش دیده و مراحل مدل سازی دقیق و ماهر بیشتر برای تولید اطلاعات مفید از مجموعه داده های ابر نقطه ای بزرگ نیاز دارند. به این دلایل، و با توجه به رواج تلفنهای هوشمند، آزمایشها و طراحی سیستم ما بر استفاده از اندازهگیریهای نادقیق فضاهای داخلی برآورد شده از حسگرهای جهتیابی تلفن همراه تمرکز دارد. به طور خاص، ما از حسگرهای شتاب سنج، مغناطیس سنج و ژیروسکوپ استفاده می کنیم.
نقشه برداری از فضای داخلی ساختمان برای ایجاد نقشه های دقیق طبقات یک کار زمان بر و مستعد خطا است. ناهماهنگی در ابعاد اتاق، ضخامت دیوارها، ابزار اندازه گیری نادقیق و نادرست به ناچار منجر به شکاف و درگیری در پیش نویس های پلان می شود. هنگامی که اندازهگیریها برای تشکیل یک پلان کامل جمعآوری میشوند، هندسهای که دیوارها و اتاقها را نشان میدهد ممکن است کمتر یا بیش از حد از مرز بیرونی باشد. برای رفع این کاستیها، تنظیمات دستی پلان اغلب باید به صورت دستی انجام شود تا نمایش زیباییشناختی و منسجمی از ساختمان ایجاد شود. هنگام استفاده از یک دستگاه اندازه گیری که نمایش های پر سر و صدا و غیر دقیقی ایجاد می کند، ممکن است برای ایجاد یک نتیجه رضایت بخش، تنظیمات زیادی در داده های ورودی مورد نیاز باشد.
رویکرد: در این کار از یک ابزار موبایل تعاملی ساده برای کاربران برای اندازهگیری سطوح داخلی ساختمان استفاده میکنیم. کاربر در طبقهای از یک ساختمان حرکت میکند و هر فضای داخلی یا اتاق را بهعنوان یک شکل دوبعدی جداگانه اندازهگیری میکند. این نمایش های فردی در یک طرح کلی ساختمان دقیق در نمای پلان روی دستگاه تلفن همراه مونتاژ می شوند. سپس با استفاده از طرح کلی ساختمان و توپولوژی داخلی، تنظیمات اتوماتیک اندازه گیری اتاق انجام می شود. با استفاده از مدلسازی محدود، ما به طور همزمان دقت موقعیت را بهبود میبخشیم و اختلافات در هندسه پلان ساختمان را حل میکنیم. سپس نقشه های ساختمان ممکن است برای تولید مدل های ساختمانی 2.5 بعدی اکسترود شده استفاده شوند.
مشارکت های ما عبارتند از:
-
نمایش یک سیستم انتها به انتها برای تولید نیمه خودکار مدلهای ساختمانی معنایی از اندازهگیریهای داخلی نادقیق ساخته شده با یک برنامه کاربردی تلفن هوشمند تعاملی.
-
یک مدل بهینه سازی محدود که از دانش ساخت و ساز ساختمان و داده های بیرونی برای مقیاس بندی و اصلاح اندازه گیری های داخلی با استفاده از بهینه سازی تصادفی بهره می برد.
-
ارزیابی کمی بهبود در دقت موقعیتی از استفاده از مدل بهینهسازی.
-
مقایسه روش پیشنهادی با ثبت ساده و مقیاسبندی اندازهگیریهای نادقیق پلان.
4. نمای کلی سیستم
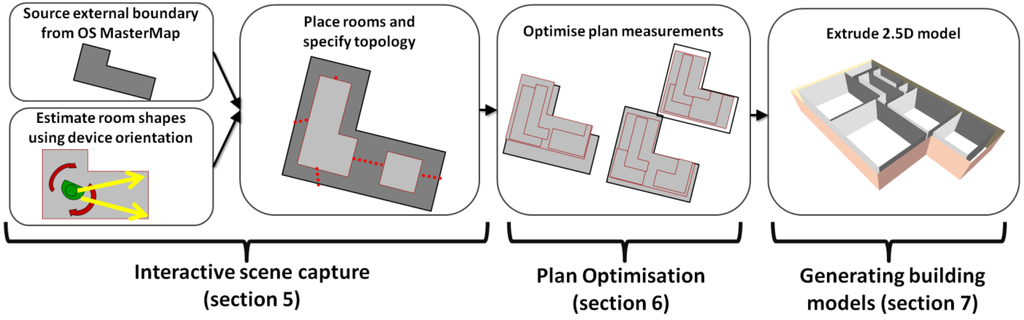
سیستم ما ساخت نیمه خودکار مدلهای ساختمان معنایی مقیاس متریک را قادر میسازد که فرض منهتن جهان را برآورده کند. دیدگاه جهان منهتن ادعا می کند که هندسه مسطح فضای داخلی شامل سه جهت غالب است. این سیستم از یک برنامه کاربردی تلفن هوشمند مبتنی بر جهت گیری ساده برای اندازه گیری ابعاد اتاق استفاده می کند. پس از مشخص کردن توپولوژی اتاق (مجاورت در و دیوار)، اندازهگیریهای داخلی به طور خودکار با ترکیب دادههای داخلی با طرح کلی ساختمان که از پایگاه داده نقشه توپوگرافی تهیه شده است، بهبود مییابد. در نهایت، مدلهای ساختمانی معنایی با مجاورتهای دیوار مناسب و اطلاعات اتصال اتاق ساخته میشوند. شکل 1 نمای کلی از فرآیندهای سیستم را ارائه می دهد.
شکل 1. نمای کلی سیستم و بخش های کاغذ مرتبط.
5. ضبط صحنه تعاملی
5.1. اندازه گیری های داخلی
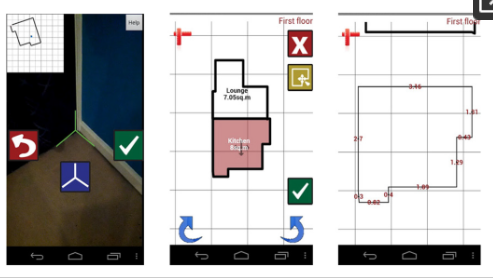
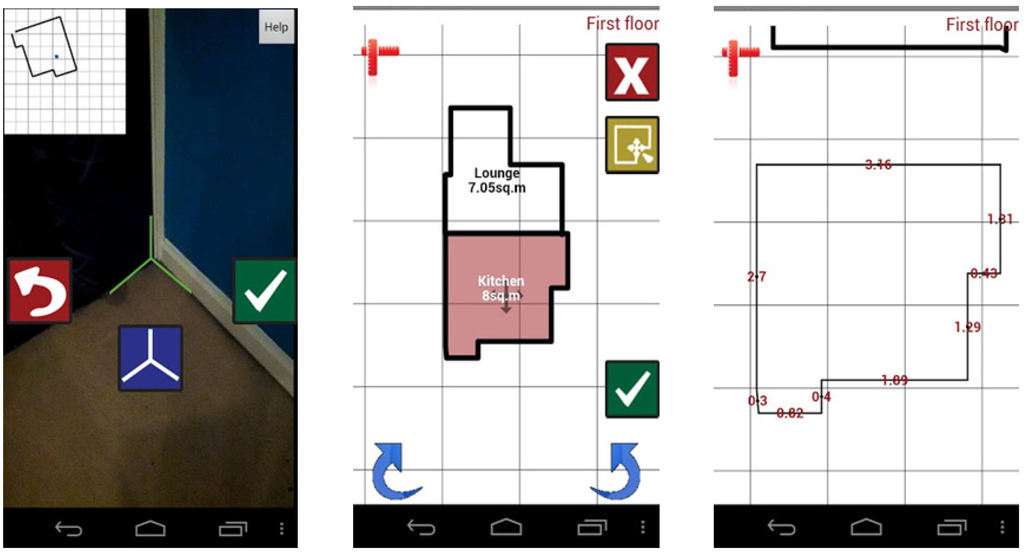
برای ضبط تعاملی اندازهگیریهای ساختمان، از ابزار اندازهگیری اتاق مبتنی بر تلفن هوشمند استفاده میکنیم (جزئیات بیشتر، رجوع کنید به Rosser و همکاران [ 28 ]). به طور خلاصه، این ابزار از حسگرهای جهت یابی تعبیه شده در دستگاه و پیش نمایش دوربین برای ثبت اطلاعات شکل و ارتفاع اتاق استفاده می کند. کاربران تعاملی شبیه به ثبت یک عکس پانوراما را انجام می دهند – فرآیندی که برای بسیاری از اپراتورهای گوشی های هوشمند آشنا است. کاربران در نقطه ای در مرکز اتاق می چرخند و نقاط گوشه دیوار را در سطح کف می گیرند ( شکل 2 را ببینیدترک کرد). امتیازها به ترتیب اضافه میشوند و یک خط دوبعدی ساخته شده و در زمان واقعی به کاربر نمایش داده میشود. از آنجایی که کاربران برای نشان دادن نقاط گوشهای که ممکن است در برخی از صحنههای داخلی مسدود شوند، تکیه میکنند، این نمایشگر باعث میشود اشتباهات فاحش در اندازهگیریها در طول فرآیند عکسبرداری شناسایی شوند. برای هر نقطه مشخص شده، جهت گیری دستگاه (آزیموت، گام و رول) با استفاده از حسگرهای شتاب سنج، مغناطیس سنج و ژیروسکوپ تخمین زده می شود. مکان های نسبی نقاط گوشه با فرض ارتفاع دستگاه و مثلثات از پیش تعیین شده برای تخمین محدوده محاسبه می شوند. در مجموع این نقاط مرز داخلی یک اتاق را نشان می دهند.
شکل 2. صفحه نمایش برنامه های موبایل. تصویربرداری اتاق ( سمت چپ )، چیدمان اتاق ( مرکز )، جزئیات اندازه گیری اتاق ( راست ).
این رویکرد مدل سازی ساده، ارتفاع دستگاه خاصی را در نظر می گیرد که هندسه اتاق را مقیاس می کند. با این حال، یک مقدار دقیق ضروری نیست، زیرا در طول بهینهسازی پلان (به بخش 6 مراجعه کنید ) اندازهگیریها به گونهای حل میشوند که در ردپای ساختمان قرار بگیرند و منجر به مقیاسبندی مناسب میشود. برای کمک به جمعآوری اندازهگیری، هندسه اتاق را شامل دیوارهای موازی و متعامد فرض میکنیم و شکل مستطیلی تعریف شده توسط نقاط گوشه را با استفاده از حداقل مربعات حل میکنیم.
رویکرد حداقل مربعات محدود توسط گاندر و فون مت [ 29] با یک سیستم معادلات خطی (در این مورد که سطوح دیوار را نشان میدهد) که در حین ضبط صحنه ساخته و حل شده است، اتخاذ میشود. محدودیت مستطیلی ادعا می کند که همه خطوط باید موازی یا متعامد با یکدیگر باشند و این در رویکرد حداقل مربعات مورد سوء استفاده قرار می گیرد. این رویکرد فرض می کند که نقاط اتاق به ترتیب اضافه می شوند و با هم یک چند خط تشکیل می دهند. همانطور که یک خط جدید در طول فرآیند گرفتن اتاق اضافه می شود، زاویه بین خود و خط قبلی ارزیابی می شود و خط به عنوان موازی یا متعامد برچسب گذاری می شود. خطوط مشاهدات اندازه گیری را در سیستم حداقل مربعات تشکیل می دهند که با استفاده از تجزیه QR و تجزیه ارزش منفرد حل می شود. برای اطمینان از برچسب گذاری صحیح خطوط به عنوان متعامد یا موازی، برنامه بازخورد شکل اتاق ساخته شده را در طول ضبط صحنه به کاربر نمایش می دهد.
5.2. طرح اولیه طرح و تولید توپولوژی
پلان های کامل طبقات ساختمان ممکن است با استفاده از تکنیک فوق و دنباله ای از تعاملات ساده کاربر ایجاد شود. هر اتاق به طور مستقل اندازه گیری می شود و به صورت دستی در یک نمای پلان قرار می گیرد ( شکل 2 را در مرکز ببینید). اندازهگیریهای جداگانه دیوار نیز ممکن است قابل مشاهده باشد ( شکل 2 را در سمت راست ببینید). در حین چیدمان، هر ویژگی اضافی که ممکن است در طرح کلی ساختمان برگرفته از داده های نقشه توپوگرافی مشهود باشد، قابل ویرایش است. هر فضای داخلی که به راحتی قابل اندازهگیری نیست، مانند کمدهای تعبیه شده در دیوارها، ممکن است بهعنوان قسمتهای بالشتکی بین اتاقها علامتگذاری شوند. در نهایت، کاربران روابط مجاورت بین دیوارها و درها را مشخص می کنند. اینها ممکن است با ضربه زدن یا کلیک کردن روی نقاط روی هر شکل اتاق تعریف شوند.
در حالی که تعدادی از این مراحل را می توان به طور خودکار به دست آورد و/یا می توان آنها را نادیده گرفت، گنجاندن این فعل و انفعالات با پیچیدگی کم که می توانند در دستگاه ضبط انجام شوند این فرصت را برای کاربر فراهم می کند تا تعامل اضافی را برای افزایش دقت طرح مبادله کند.
5.3. مرز خارجی
یک مرز خارجی که نمایانگر طرح کلی ساختمان است، فضای بسته ای را فراهم می کند که اندازه گیری های داخلی در آن قرار گرفته و تنظیم می شوند. مرز به صورت چند ضلعی است که با دقت بالایی گرفته شده و نمایانگر ردپای بیرونی (طرح کلی) ساختمان است. در آزمایشهای خود ما ردپای ساختمانی را که هم از نقشهبرداری زمینی و هم از نقشهبرداری توپوگرافی در مقیاس بزرگ که از یک آژانس نقشهبرداری ملی تهیه شده است، آزمایش میکنیم. منطق ما این است که نقشه برداری توپوگرافی سطح بالایی از دقت و منبع گسترده ای از مقیاس و داده های مرجع مختصات جغرافیایی را ارائه می دهد. برای مثال، دادههای Ordnance Survey MasterMap با دقت اسمی 1 متر (فاصله اطمینان 99٪) در مناطق شهری تعریف شده است [ 30 ].
5.4. نمایندگی
پلان های داخلی به عنوان مجموعه ای از چند ضلعی های مستطیلی مدل سازی می شوند که ابعاد داخلی اتاق ها را نشان می دهند. ما بین انواع مختلف ساختار توپولوژیکی با این مدل تمایز قائل می شویم: اتاق هایی که با درها و دیوارهای مشترک به هم متصل می شوند. هر دهانه در به عنوان دو نقطه مجزا در امتداد هر مرز (دیوار) اتاق های مربوطه مدل سازی می شود. دیوارهای مجاور (لبههای چند ضلعی) نیز به صورت دوتایی مدلسازی میشوند، اما برای پشتیبانی از شرایط هزینه متفاوت در طول بهینهسازی، برچسبهای متفاوتی دارند (به بخش 6.4.2 مراجعه کنید ).
6. بهینه سازی طرح
عوامل مختلفی در ایجاد خطا در ابعاد داخلی با استفاده از ابزار ضبط تعاملی نقش دارند. نویز در داده های حسگر باعث ایجاد خطا در تخمین نقطه گوشه می شود. کاربران ممکن است بهطور تصادفی یا در نتیجه موانع صحنه، گوشههای پیشنمایش دوربین را به اشتباه علامتگذاری کنند. علاوه بر این، در حالی که ابعاد اتاق بر اساس ارتفاع دستگاه مشخص شده توسط کاربر محاسبه می شود، مقیاس مدل را نمی توان صحیح فرض کرد. این خطاها منجر به اندازهگیری اتاق میشود که بین اتاقهای مختلف یا با دادههای ردپای ساختمان ناسازگار است و به بهینهسازی بیشتر نیاز دارد.
هسته سیستم ما تنظیمات خودکار مدلهای اتاق غیردقیق را انجام میدهد تا بهترین تناسب اندازهگیریها را در چارچوب محدودیتهای طرح کلی ساختمان پیدا کند. مجموعهای از اندازهگیریهای داخلی و خارجی و ساختارهای داده مجاورت مشخص بین اتاقها و ویژگیهای بیرونی، ورودیهای بهینهسازی را تشکیل میدهند. نتیجه فرآیند تنظیم مجموعه ای از اندازه گیری های اتاق با دقت بهبود یافته و یکپارچگی قابل قبول با داده های نقشه توپوگرافی است که امکان تولید مدل های ساختمان معنایی 2.5 بعدی جغرافیایی مرجع را فراهم می کند.
6.1. بازپخت شبیه سازی شده
مسئله بهینه سازی پیچیده است زیرا شکل و موقعیت هر اتاق در پلان باید در یک توزیع پیوسته از مقادیر ممکن تنظیم شود. با این حال، اصلاحات در هندسه اتاق فردی نیز می تواند تضادهایی با سایر بخش های پلان ایجاد کند. یک رویکرد جهانی مورد نیاز است که محدودیتهای نرمی را در هندسه (مانند ابعاد دیوار، مساحت اتاق و موقعیت) و محدودیتهای سخت (مانند شکل و توپولوژی اتاق) اعمال کند. این امر سودمندی تکنیک های جستجوی محلی (مانند گرادیان-نزول) را که مستعد به دام افتادن در حداقل های محلی هستند، محدود می کند.
برای پرداختن به این مشکل، یک روش بهینهسازی تصادفی، بهویژه بازپخت شبیهسازیشده، برای جستوجوی یک تقریب خوب برای بهینه جهانی [ 31 ] اتخاذ شده است. بازپخت شبیهسازی شده، حرکاتی را میپذیرد که تابع هزینه را کاهش میدهند، اما با پذیرش تنظیمات وضعیت ضعیف در سطح معینی از احتمال، از گرفتار شدن در حداقلهای محلی جلوگیری میکند. احتمال پذیرفته شدن حرکات ضعیف طبق یک برنامه خنک کننده کاهش می یابد. یک برنامه خنککننده که خیلی سریع است منجر به اکتشاف ناکافی فضای جستجو میشود و احتمالاً یک راهحل حداقل محلی را برمیگرداند. با این حال، نرخی که بسیار آهسته است ناکارآمد است و ممکن است زمان زیادی طول بکشد تا همگرا شود تا کاربرد عملی داشته باشد.
معیار Metropolis برای تعیین احتمال انتقال به یک پیکربندی با استفاده از یک تابع هدف مانند بولتزمن استفاده می شود. f( x ) = ه– βسی( x )�(ایکس) = ه–�سی(ایکس)جایی که ایکسایکسیک نقشه ساختمان است، C تابع هزینه تعریف شده در بخش 6.4 و β�ثابت است در هر تکرار، یک تنظیم یک پیکربندی جدید ایجاد می کند x ‘ایکس“که با احتمال پذیرفته می شود.
6.2. حرکت های پیشنهادی
برای انجام ارزیابی های هزینه در فرآیند بهینه سازی بازپخت شبیه سازی شده، سیستم باید حرکت های پیشنهادی را ایجاد کند. حرکات پیشنهادی محله ای از راه حل های نامزد را در اطراف وضعیت فعلی سیستم تشکیل می دهد. اگر بهینهسازی فضای راهحل را به طور کامل کشف کند و به یک راهحل رضایتبخش همگرا شود، تولید طیف خوبی از پیشنهادهای جایگزین از اهمیت حیاتی برخوردار است. به طور خاص، یک راه حل نامزد باید از طریق استفاده از یک دنباله از حرکات پیشنهادی از هر راه حل دیگری قابل دسترسی باشد [ 32 ].
چهار اصلاح پیشنهاد طراحی و اجرا شده است. تعداد زیادی از حرکات پیشنهادی یک فضای محله بزرگ ایجاد می کند. به طور کلی، محله های کوچک ترجیح داده می شوند [ 32 ]. در طول هر تکرار الگوریتم، یک حرکت پیشنهادی برای ارزیابی با توجه به یک احتمال یکسان انتخاب می شود. در این کار چهار حرکت تعریف شده است. اولی، جابجایی اتاق، کل هندسه اتاق را تغییر می دهد. سه حرکت باقیمانده جنبه های خاصی از هندسه یک اتاق را تغییر می دهد. محدودیتهای سخت (که در بخش 6.3 بحث شد ) از تولید طرحهایی با توپولوژی غیرقابل اجرا جلوگیری میکند و اشکال اولیه اتاق را حفظ میکند. برای تصاویر هر حرکت پیشنهادی به شکل 3 مراجعه کنید .
شکل 3. حرکت های پیشنهادی. جابجایی اتاق ( چپ )، تنظیم گوشه ( سمت چپ )، تنظیم دیوار ( سمت راست )، تنظیم دیوار مشترک ( راست ).
6.2.1. جابجایی اتاق
یک اتاق یک نفره مجاز است به طور مستقل در فضای آزاد که توسط پوسته بیرونی ساختمان و سایر عناصر اتاق تعریف شده است حرکت کند. این حرکت شامل یک ترجمه دو بعدی است. قدر و جهت از یک توزیع نرمال تعیین می شود. بنابراین برای شی اتاق i، موقعیت آن به عنوان مختصات تعریف می شود پمنپمن، شاید به روز رسانی شود پمن→پمن+ δپ ��→��+�� جایی که δp ~ ( نایکس( 0 , σ ) نy( 0 , σ ) )�� ~ (�x(0,σ) �y(0,σ) )و x و y متغیرهای مربوط به مختصات x و y هستند. یک ارزش موثر برای σσبه طور تجربی 0.05 متر تعیین شد.
6.2.2. تنظیم گوشه
یک جفت دیوار متعامد به هم پیوسته در یک اتاق جداگانه ممکن است به هر یک از جهت های مربوطه به حالت عادی ترجمه شود. راس گوشه اتاق به طور تصادفی با هر دیوار انتخاب می شود و سپس به مقدار مساوی ترجمه می شود. استفاده از مقدار مساوی اجازه می دهد تا اتاق ها بزرگ و منقبض شوند و در عین حال شکلی مشابه، اما نه یکسان داشته باشند. این بدان معنی است که یک حرکت پیشنهادی اضافی برای بزرگ کردن اتاق لازم نیست. بزرگی هر ترجمه دیوار از یک توزیع نرمال تعیین می شود δ ~ ن ( 0 , σ )� ~ �(0,σ)جایی که σ σ به طور تجربی 0.05 متر تعیین شد.
6.2.3. تنظیم دیوار
شکل یک اتاق یک نفره با حرکت دادن یک دیوار جداگانه تنظیم می شود. دیوار به طور تصادفی انتخاب شده و به صورت متعامد در جهت آن ترجمه شده است. بزرگی ترجمه از یک توزیع نرمال تعیین می شود δ ~ ن ( 0 , σ )� ~ �(0,σ)جایی که σ σ به طور تجربی 0.05 متر تعیین شد.
6.2.4. تنظیم دیوار مشترک
تنظیم دیوار مشترک به طور تصادفی یک جفت دیوار مجاور (موازی) را انتخاب می کند و هر دو ویژگی را با فاصله یکسان می لغزد. بزرگی ترجمه از یک توزیع نرمال تعیین می شود δ ~ ن ( 0 , σ )� ~ �(0,σ)جایی که σ σبه طور تجربی 0.05 متر تعیین شد.
6.3. محدودیت های سخت
ما محدودیتهای سختی را برای کمک به محدود کردن فضای محله و جلوگیری از تولید طرحهای ساختمانی غیرقابل اجرا تعریف میکنیم. طرحهای پیشنهادی قبل از ارزیابی در تابع هزینه برای محدودیتهای سخت آزمایش میشوند و در صورت مغایرت با موارد زیر رد میشوند:
محدودیت های شکل پلان های اولیه شامل تعاریف مستطیلی از شکل اتاق است. در مواردی که اتاقها مستطیل شکل نیستند (مانند L شکل)، حرکتهای پیشنهادی که موقعیتهای دیوار یا گوشه را تغییر میدهند، نباید اشکال وارونه یا منعکس شده ایجاد کنند.
محدودیت های توپولوژیکی ساختار توپولوژیکی پلان که اتاقهای مجاور، دیوارهای مشترک و درگاهها را تعریف میکند، صحیح فرض میشود، و برای اطمینان از اینکه تنظیمات باعث ایجاد نقشههای ساختمانی منسجم میشوند، حفظ میشود. اتاق ها در هر پیکربندی x باید در داخل ناحیه ای باشند که توسط پوسته بیرونی ساختمان تعریف شده است. در واقع، این ترکیب مناسب یک مدل بیرونی با اندازهگیریهای داخلی نادقیق را تضمین میکند. به طور مشابه، اتاق ها نباید روی هم قرار بگیرند.
6.4. تابع هزینه
تابع هزینه C(x ) محدودیت های متناسب با چیدمان فضای داخلی ساختمان را تعریف می کند و تابعی را برای ارزیابی کیفیت یک طرح معین ارائه می دهد. هدف از فرآیند بهینه سازی به حداقل رساندن این تابع هزینه و در نتیجه بهبود کیفیت اندازه گیری است. انتخاب محدودیت ها بر اساس دانش قبلی از ساختار احتمالی ساختمان و حفظ اطلاعات ضروری گرفته شده با دستگاه اندازه گیری است. تابع هزینه به صورت تعریف شده است
که در آن x پلان ساختمان و αw t���، αیک w��� αa d���، αr s���و αr a���ضرایب وزنی هستند که اهمیت نسبی هر عبارت هزینه مربوطه را تعریف می کنند. در این کار همه وزنها روی 1 تنظیم شدهاند. شرایط هزینه، ضخامت دیوار C wt ، مجاورت دیوار C aw ، مجاورت درب C ad ، شکل اتاق Crs و مساحت اتاق Cra ، به صورت جداگانه در زیر تعریف شدهاند.
6.4.1. ضخامت دیوار
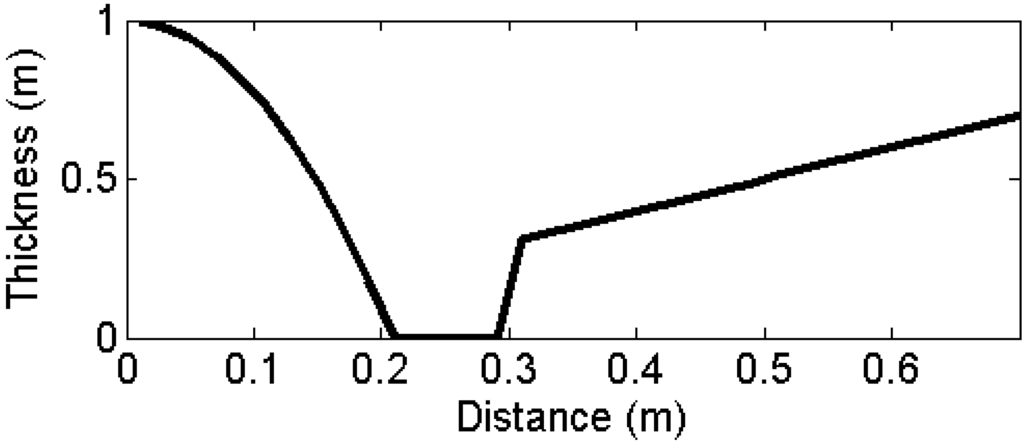
دیوارها بی نهایت نازک نیستند و ضخامت آنها ممکن است به طور قابل توجهی بین ساختمان های مختلف و حتی در یک ساختمان متفاوت باشد. در حالی که بسیاری از خانههای مسکونی آجری هستند، وجود یا عدم وجود دیوار حفرهای خارجی ضخامت دیوار را تغییر میدهد. به عنوان مثال، در بریتانیا بسیاری از ساختمانهای ساخته شده قبل از دهه 1920 از دیوارهای آجری جامد (شاید فقط 210 میلیمتر ضخامت) تشکیل شدهاند، در حالی که ساختمانهای جدیدتر تمایل به دیوارهای حفرهای دارند [ 33 ]. پارتیشن های دیوار داخلی نیز ممکن است بسته به ویژگی های باربر متفاوت باشد. برای توضیح این تغییر، هم مجاورت های داخلی-خارجی و هم داخلی-داخلی را مدل می کنیم و از یک تابع هدف برای ارزیابی ضخامت دیوار استفاده می کنیم. اجازه دهید w = {w1،w2…wک}�={�1,�2…��}تمام دیوارها را در پلان نشان می دهد. هزینه ضخامت دیوار برای دیوارهای مجاور می باشد
که در آن k = تعداد دیوارهای پیوسته، جایی که D عملگر فاصله است، wمن��و wj��یک جفت دیوار هستند، پwمنwj�����= 1 اگر wمن��و wj��مجاور هستند و 0 در غیر این صورت، l و u کران ضخامت پایین و بالایی هستند و t یک تابع ضخامت است. تابع هدف t به صورت تعریف شده است
تابع t ، که در شکل 4 نشان داده شده است، زمانی که فاصله d در محدوده توصیه شده توسط l و u تعریف شده باشد، به صفر می رسد . مقادیر l و u برای دیوارهای داخلی-خارجی 0.21 متر و 0.30 متر برای حمایت از ضخامت آجر تک و دیوارهای حفره ضخیمتر تعیین شد. مقادیر l و u برای دیوارهای داخلی-داخلی به ترتیب 0.15 متر و 0.2 متر بر اساس آجر تک و ضخامت های پارتیشن داخلی معمولی تعیین شد [ 34 ].
شکل 4. تابع مثال t(d,0.21,0.30) .
6.4.2. توپولوژی پلان
ساختار توپولوژیکی یک ساختمان، همانطور که توسط مجاورت های دیوار و درگاه های متصل تعریف می شود، باید حفظ شود تا اطمینان حاصل شود که یک طرح ساختمانی احتمالی ایجاد می شود. برای رسیدن به این هدف ما از روابط زوجی بین اشیا استفاده می کنیم. برای یک جفت دیوار مجاور f و g ، حداکثر فاصله را در جایی که ضخامت خارج از حد فوقانی توصیه شده u است، همانطور که در بخش 6.4.1 تعریف شده است، می گیریم .
جایی که پfg���= 1 اگر f و g دیوارهای زوج باشند و 0 در غیر این صورت، w مجموعه دیوارها و با است
و D اپراتور فاصله است. به طور شهودی، این اصطلاح از جدا شدن بیش از حد اتاقها جلوگیری میکند و از کاوش در پیکربندیهای بعید طرح در طول بهینهسازی جلوگیری میکند.
ما همچنین اصطلاحی را برای تشویق انسجام بیشتر بین مدلهای اتاق که با یک درگاه متصل هستند تعریف میکنیم.
جایی که پa ب���= 1 اگر a و b نقاط در جفت شوند و 0 در غیر این صورت.
6.4.3. شکل اتاق
پلان ورودی اشکال اولیه اتاق چند ضلعی مستطیلی را ارائه می دهد. هزینه شکل اتاق شباهت بین اشکال اولیه و شکل های تولید شده در طول فرآیند بهینه سازی را کنترل می کند. ما از تناسب لبه برای حفظ شباهت شکل اتاق استفاده می کنیم. به طور شهودی، این اصطلاح طول نسبی هر بخش از دیوار را که شکل اتاق را تشکیل می دهد، حفظ می کند. هزینه شکل اتاق است
جایی که ه–�−یک لبه در شکل اولیه اتاق است و e لبه مربوطه در شکل تنظیم شده است. آر–�−یک شکل اولیه اتاق است، R شکل تنظیم شده مربوطه، P عملگر محیط ، m تعداد لبه های شکل، n تعداد اتاق ها و ||.|| طول اقلیدسی لبه را محاسبه می کند.
6.4.4. منطقه اتاق
همانند شکل اتاق، نسبت مساحت اتاق برای کنترل شباهتهای بین طرحهای اولیه و تنظیمات پیشنهادی حفظ میشود. هزینه مساحت اتاق به صورت تعریف شده است
که در آن A عملگر ناحیه است، آر–�−شکل اولیه اتاق است، آر�شکل تنظیم شده مربوطه و n تعداد اتاق ها است.
7. تولید مدل های ساختمان
با توجه به مجموعهای از اندازهگیریهای داخلی و دادههای مربوط به ردپای ساختمان، ما قبل از تولید مدلهای ساختمانی، پس پردازش را انجام میدهیم. ما مدل داده های معنایی CityGML را که برای تعریف و تبادل اطلاعات شهری سه بعدی طراحی شده است [ 26 ] اتخاذ می کنیم. به گونهای تعریف شده است که برای طیف وسیعی از استفادههای ممکن از مدلهای ساختمانی سه بعدی قابل استفاده باشد، حاوی توصیههای صحت است و با دادههای مکانی موجود که با استفاده از چارچوبهای مرجع مختصات جهانی ارجاع شدهاند، ادغام میشود. تولید مدلهای معنایی با مؤلفههای ساختمانی تعریفشده مناسب، رویکرد ما را به عنوان یک سیستم مدلسازی پایان به پایان کامل میکند. تمرکز بر CityGML نسخه 2 است که بر اساس یک طرح مفهومی UML برای اطلاعات جغرافیایی (ISO TS 19103) تعریف شده است [ 27 ]].
هندسه داخلی پس از پردازش
دیوارهای خارجی و داخلی ممکن است به طور خودکار اکسترود شوند و با ویژگی های CityGML مناسب تخصیص داده شوند. به طور خاص، با تعریف دیوارهای خارجی به عنوان یک چند ضلعی، چند ضلعی ممکن است به یک ارتفاع از پیش تعیین شده اکسترود شود، لبه های اکسترود شده را به عنوان عناصر WallSurface تنظیم کند و MultiSurface حاصل را به عنوان یک جامد LoD1 تنظیم کند. دیوارهای داخلی را می توان به طور مشابه با لبه های اکسترود شده به عنوان عناصر InteriorWallSurface تشکیل داد. جامد LoD4 حاصل به عنوان یک اتاق و به عنوان بخشی از عنصر کلی ساختمان تنظیم می شود.
درها نیز ممکن است به نمایندگی ها اضافه شوند. در این کار، موقعیتهای درگاه بهجای هندسه دو بعدی یا سهبعدی، بهعنوان نقاط منفرد روی دیوارها مدلسازی میشوند. با این حال، نمونههایی از عنصر معنایی Doorway ، یک زیر کلاس Opening ممکن است به هر اتاق اضافه شود.
8. نتایج
برای ارزیابی سیستم پیشنهادی، نتایجی را برای شش پلان ساختمانی ارائه میکنیم که با پلانهای A-F مشخص میشوند. پلانهای A و B همان فضای داخلی ساختمان را مدلسازی میکنند، اما برای کمک به ارزیابی مدل بهینهسازی محدود ما، تنها برای پلان A از دادههای ردپای ساختمان خارجی بر اساس اندازهگیریهای نقشه برداری زمینی که با استفاده از برد یاب لیزری Leica DISTO گرفته شده است، استفاده میکنیم. Plans BF از ردپای ساختمان خارجی بر اساس محصول نقشه برداری توپوگرافی MasterMap Ordnance Survey استفاده می کند. برآورد ابعاد داخلی با دستگاه تلفن همراه Samsung Galaxy Nexus و فرمهایی در دادههای ورودی برای بهینهسازی بعدی ثبت شد.
برای ارائه داده های حقیقت زمین برای ارزیابی، بررسی های اندازه گیری شده از هر اتاق با استفاده از یک فاصله یاب لیزری تکمیل شد. برای فعال کردن مقایسههای دقت، دادههای پیمایش حقیقت زمینی به همان روشی که دادههای تعدیلشده نشان داده شد، بهعنوان مثال ، اندازهگیریهای حقیقت زمین، اندازهگیریهای ورودی و اندازهگیریهای خروجی حاوی تعداد مساوی از نقاط داده (مختصات گوشه) هستند. موقعیت درها به عنوان بخشی از ارزیابی دقت در نظر گرفته نشده است زیرا موقعیت درگاه ها در جمع آوری داده های اولیه برآورد نشده است. ما همچنین اندازه گیری های منطقه را ارزیابی می کنیم.
مدل بهینهسازی محدود ما با ثبت و بزرگنمایی ساده طرح ورودی که با استفاده از گرادیان-نزولی تصادفی تکمیل شده است، مقایسه میشود، که از اینجا به بعد برای اختصار، گرادیان-نزول نامیده میشود. این روش تلاش میکند تا طرح اولیه را که با استفاده از ابزار سیار گرفته شده است، در طرح کلی ساختمان از طریق بزرگنمایی و جابجایی تکراری جهانی و بدون تغییر اندازهگیریهای نادقیق منطبق کند. برای جلوگیری از تولید نقشههای ساختمانی غیرقابل قبول، حداقل فاصله باید بیش از 0.21 متر از طرح کلی باشد – همان حداقل ضخامت دیوار خارجی رایج که در مدل پیشنهادی ما استفاده میشود، به بخش 6.4.1 مراجعه کنید .
برای هر طرح یک دمای اولیه برای فرآیند بازپخت شبیه سازی شده پیدا شد که در آن بین 40 تا 60 درصد از حرکات پیشنهادی که هزینه را افزایش می دهند پذیرفته شد [35]. در تمام موارد دمای T با یک برنامه هندسی خنک شد تیمن + 1 = 0.9995 ⋅ تیمن��+1 = 0.9995 ·��و پس از تقریباً 16000 تکرار در دمای 0.3 متوقف شد.
8.1. نتایج تنظیم برنامه
اولین آزمایش ما، طرح A، تنظیمات را با استفاده از ردپای ساختمان خارجی بر اساس نقشه برداری زمینی بررسی می کند. شکل 5 داده های ورودی طرح A را با نتایج تنظیم روش گرادیان-نزولی و رویکرد پیشنهادی ما نشان می دهد. از نظر بصری، رویکرد پیشنهادی تطابق بهبود یافتهای را با دادههای حقیقت زمینی در مقایسه با روش سادهتر نشان میدهد. ضخامت دیوارهای داخلی و خارجی مناسب حفظ می شود.
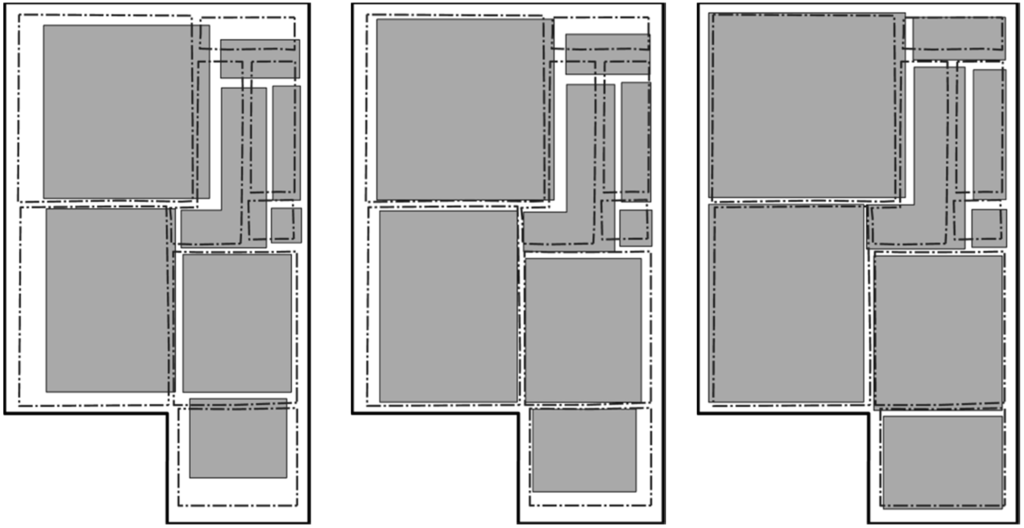
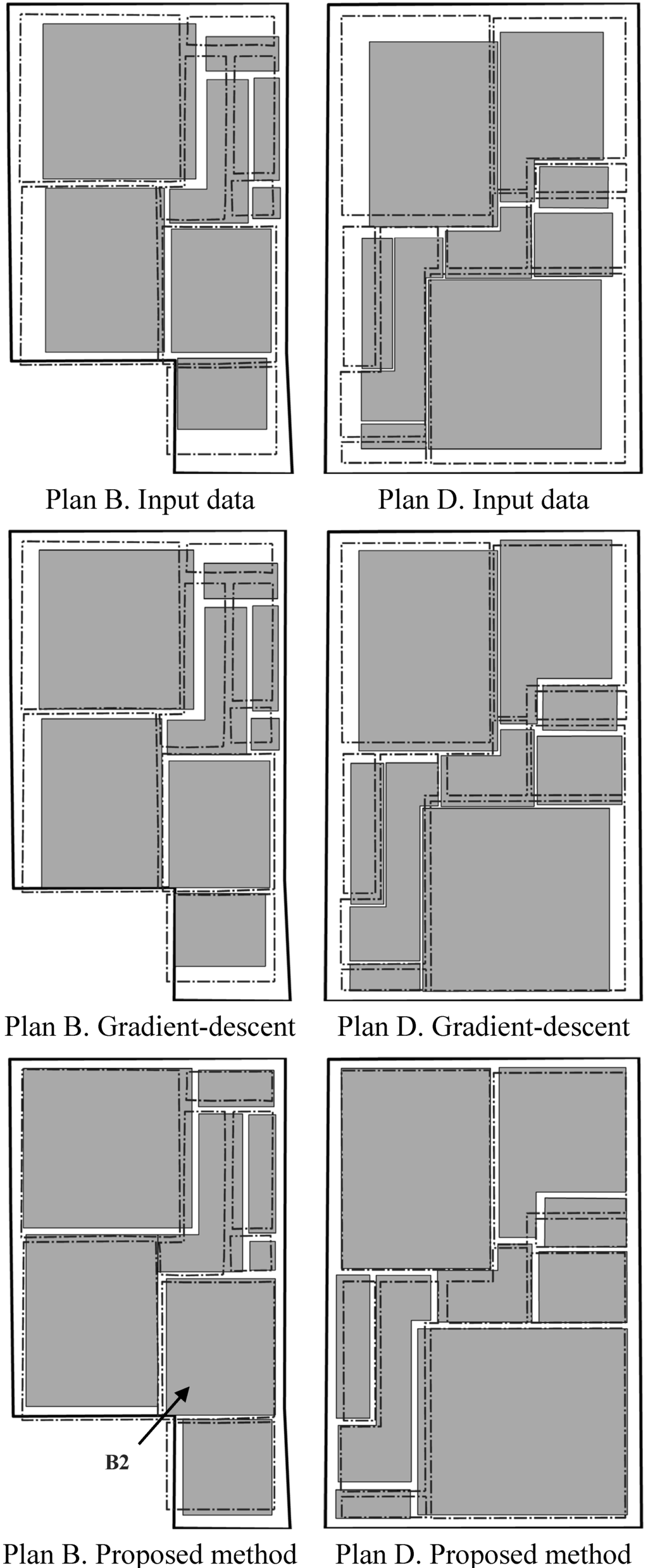
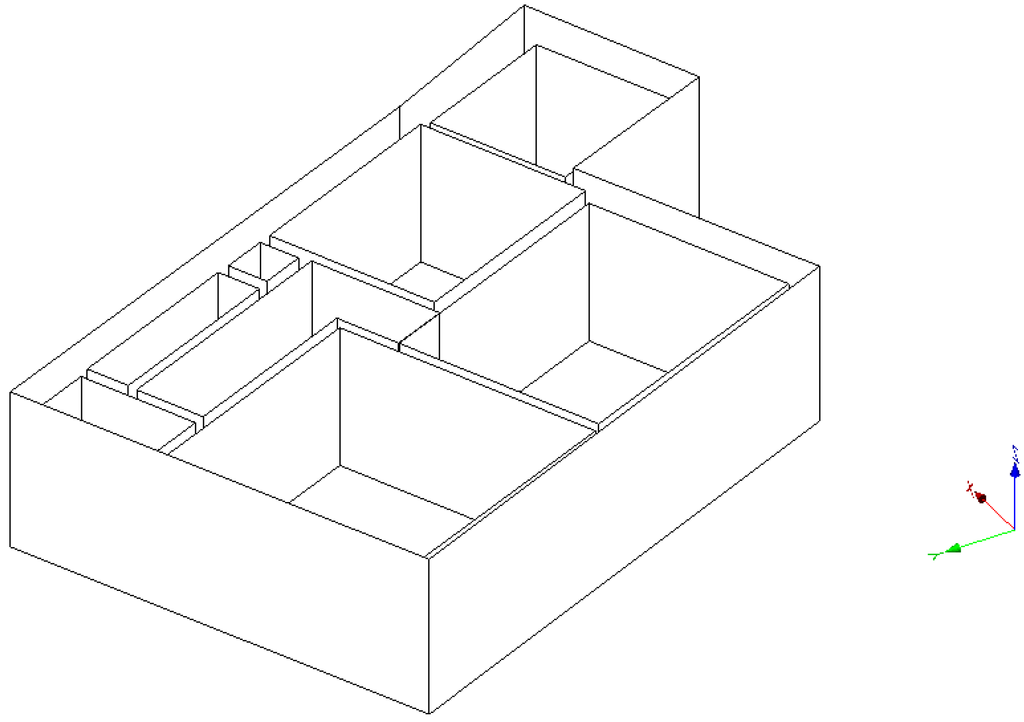
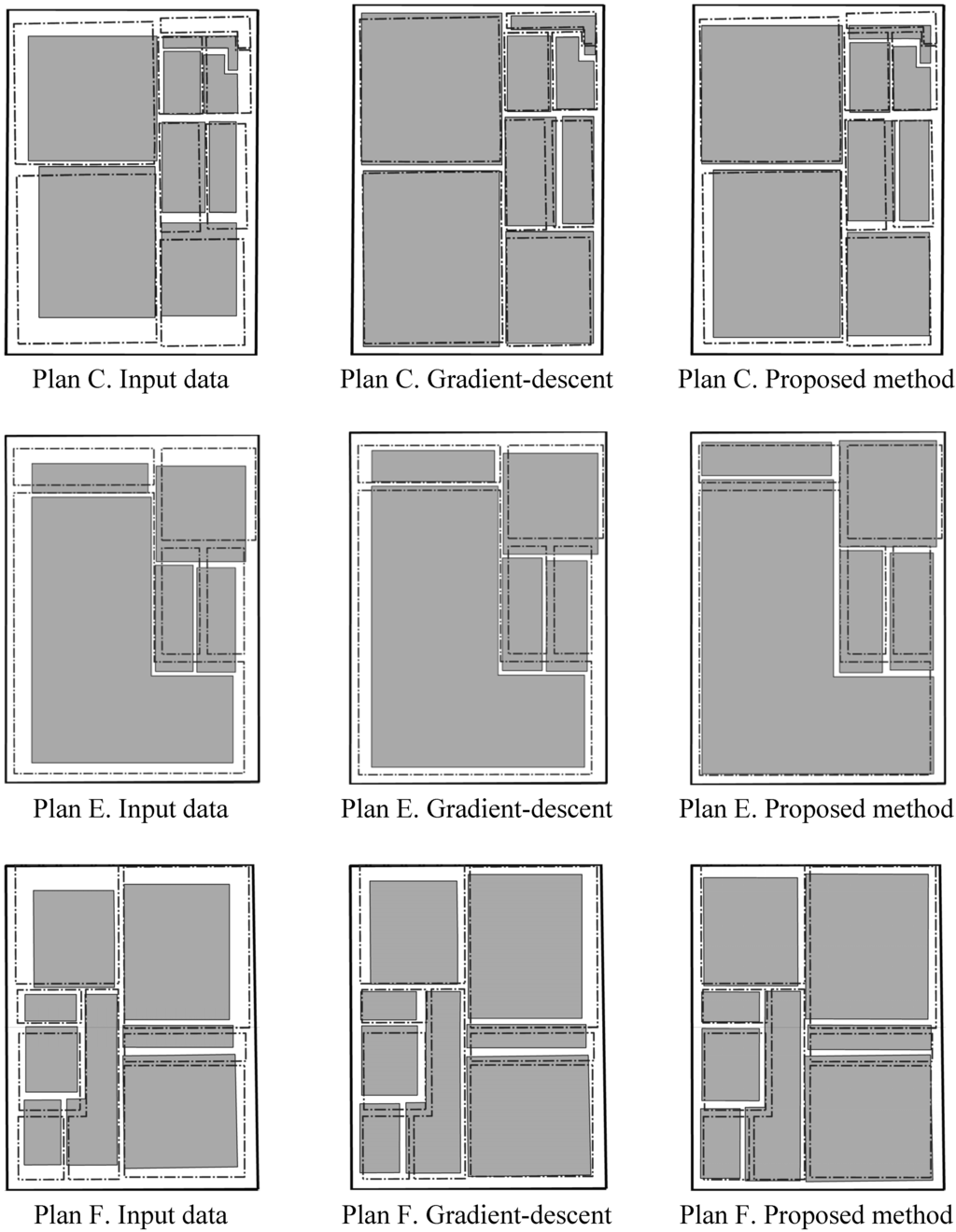
بقیه آزمایشهای ما به جزئیات آزمایشهای روی نقشههایی که توسط دادههای نقشه توپوگرافی محدود شدهاند، میپردازد. شکل 6داده های ورودی و نتایج تولید شده با استفاده از روش ثبت بر اساس گرادیان نزولی و با استفاده از روش مبتنی بر بازپخت شبیه سازی شده پیشنهادی برای پلان های B و D را نشان می دهد. به نظر می رسد روش پیشنهادی اکثر اندازه گیری های غیرعادی را در داده های ورودی حل می کند. اختلافات بزرگ کمتری بین اندازهگیریهای حقیقت زمین و اتاق با استفاده از روش پیشنهادی در مقایسه با ثبت گرادیان-نزولی ظاهر میشود. توجه داشته باشید که برای پلان B، اندازه گیری های حقیقت زمین به دلیل دست کم گرفتن جزئی ابعاد در نقشه برداری توپوگرافی، فراتر از ردپای ساختمان است. ما مرز را صحیح فرض می کنیم و تنظیماتی را در داخل آن انجام می دهیم، بنابراین روش پیشنهادی در بهبودی که ممکن است ایجاد کند محدود است. با این حال، نتیجه نهایی هنوز از نظر کیفی بهتر از گرادیان-نزولی است. نتایج طرح های C، E و F در آن گنجانده شده استپیوست A ( شکل A1 ). مدل های 2.5 بعدی اکسترود شده پلان های B، C و D در شکل 7 ، شکل 8 و شکل 9 نشان داده شده است که با استفاده از FZKViewer [ 36 ] تجسم شده است.
شکل 5. طرح ورودی ( چپ )، گرادیان-نزولی ( مرکز ) و نتایج روش پیشنهادی برای پلان A ( راست ). اندازه گیری های طرح (خاکستری جامد)، حقیقت زمین (خطوط چین).
شکل 6. نتایج طرح های ورودی، گرادیان-نزولی و برآورد روش پیشنهادی برای پلان های B ( سمت چپ ) و D ( راست ). اندازه گیری های طرح (خاکستری جامد)، حقیقت زمین (خطوط چین). به بخش 8.3 در مورد حاشیه نویسی B2 مراجعه کنید.
شکل 7. پلان B، مدل های اکسترود شده به عنوان CityGML مشاهده می شوند.
شکل 8. طرح C، مدل های اکسترود شده به عنوان CityGML مشاهده می شود.
شکل 9. طرح D، مدل های اکسترود شده به عنوان CityGML مشاهده می شود.
8.2. ارزیابی دقت
ما طیف وسیعی از ارزیابیهای دقت را در نظر گرفتیم، انتخاب ریشه پلان میانگین مربعات خطا (RMSE)، RMSE اتاق جداگانه و معیارهای مساحت را به عنوان مناسبترین برای تولید مدلهای ساختمانی معنایی دقیق در نظر گرفتیم. طرح RMSE به صورت تعریف شده است
جایی که d فاصله بین جفت نقاط گوشه اتاق متناظر در داده های تعدیل شده و حقیقت زمین و n تعداد کل جفت ها در کل پلان است. RMSE اتاق فردی به روشی مشابه محاسبه می شود – نقاط گوشه مربوطه را بر اساس هر اتاق ارزیابی می کند. جدول 1 RMSE را در تمام طرح ها از شیب-نزولی و روش های پیشنهادی مقایسه می کند. برای مجموعه کامل نتایج بر اساس اتاق، به پیوست B ( جدول B1) مراجعه کنید). به طور کلی، روش پیشنهادی دقت داده های ورودی را تا 46% بهبود می بخشد و میانگین RMSE را از 0.45 متر به 0.24 متر کاهش می دهد. روش گرادیان-نزولی دقت را 28 درصد بهبود بخشید و به 0.33 متر رسید. به طور متوسط روش پیشنهادی 25% بهبودی در RMSE نسبت به رویکرد گرادیان-نزولی ارائه میدهد، در شرایط واقعی، میانگین مزیت دقت موقعیتی 0.09 متر.
در حالی که میانگین عملکرد در کل ساختمان معیار مهمی برای دقت است، اغلب این مورد اتفاق میافتد که نقشهها در عمل بر اساس اتاق به اتاق استفاده میشوند. به این ترتیب، کاربرد کلی پلان های ساختمان اغلب با دقت اتاق فردی محدود می شود. بنابراین به عنوان یک شاخص اضافی از دقت، بدترین حالت اتاق RMSE را برای هر ساختمان گزارش می کنیم. این در جدول 1 نشان داده شده است . به طور متوسط، بدترین حالت دقت اتاق با روش پیشنهادی 0.32 متر در مقایسه با 0.44 متر با استفاده از رویکرد گرادیان-نزولی بود. قابل توجه است که برای پلان B، بدترین حالت دقت موقعیتی رویکرد گرادیان-نزولی 0.60 متر است، با روش پیشنهادی این میزان را تا 0.33 متر بهبود می بخشد.
جدول 1. RMSE (m) بر اساس پلان در مقابل حقیقت زمین.
علاوه بر موقعیت هندسی مطلق، اندازهگیریهای دقیق مساحت اتاق برای برنامههای بررسی فضای داخلی مهم است و نشانهای از دقت نسبی است. مقادیر مساحت، درصد بهبود در داده های ورودی، و دقت منطقه مطلق در جدول 2 ارائه شده است. به طور متوسط منطقه داده های ورودی با استفاده از روش پیشنهادی 89٪ بهبود یافت در حالی که گرادیان-نزولی 47٪ بهبود را ارائه کرد. روش پیشنهادی میانگین دقت منطقه مطلق 98% را در مقایسه با 89% با استفاده از گرادیان-نزول نشان داد.
توجه به این نکته حائز اهمیت است که دقت روش گرادیان-نزولی نسبت به قرارگیری اولیه اتاق ها در مرز خارجی (در این مورد از داده های MasterMap) بسیار حساس است. در حالی که برای این ارزیابی قرار دادن دقیق انجام شد تا به طور قابل توجهی به شیب نزولی در ارزیابی آسیب وارد نشود، به طور کلی این مرحله با استفاده از یک رابط کاربری گرافیکی ساده و مستعد مقادیر دلخواه خطا به دست می آید. بنابراین توجه به این نکته مهم است که در محیطهای استفاده واقعی، روش گرادیان-نزولی ممکن است در واقع منجر به عملکرد بدتر از آنچه در اینجا گزارش شده است، شود، زیرا برخلاف روش پیشنهادی، هیچ تنظیمی در موقعیتهای اتاق جداگانه در طول بهینهسازی وجود ندارد. بنابراین کیفیت پلان حاصل به مکان نسبی اولیه دقیق هندسه هر اتاق بستگی دارد.
نتایج RMSE و منطقه با هم بهبود قابل توجهی در کیفیت پلان ساختمان از طریق استفاده از بهینه سازی مبتنی بر محدودیت ارائه شده در این کار نشان می دهد. با تحمل روش پیشنهادی نسبت به قرارگیری اتاق اولیه نادرست در اندازهگیریهای بیرونی، این رویکرد به دقت موقعیتی نزدیکتر به نیاز توصیهشده CityGML 0.2 متر منجر میشود.
8.3. پایداری راه حل
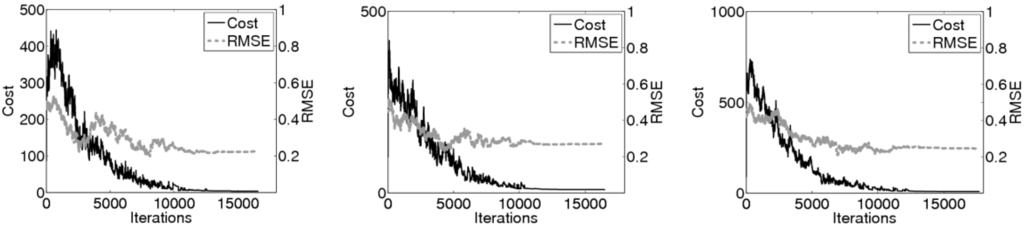
به عنوان یک بهینهسازی تصادفی، بازپخت شبیهسازی شده راهحلهای کمی متفاوت برای هر اجرای آزمایشی تولید میکند. برای مفید بودن، مدل بهینه سازی باید به طور پیوسته نزدیک به آرایش بهینه همگرا شود. برای ارزیابی پایداری بهینهسازی، هر کدام 50 کارآزمایی بر روی طرحهای A، B و D تکمیل شد. پارامترهای بازپخت با پارامترهای مورد استفاده در آزمایشهای اصلی مطابقت داشتند. جدول 3نتایج میانگین و انحراف استاندارد را برای هزینه و RMSE نشان می دهد. به یاد بیاورید که پلان A و پلان B دارای اندازه گیری های داخلی یکسانی هستند اما از داده های مرزی خارجی متفاوتی استفاده می کنند. انحراف استاندارد بالا در هزینه طرح B به دلیل مرز خارجی دست کم برآورد شده است. به طور خاص، شکل مقعر مرز منجر به دو حداقل هزینه می شود، جایی که اتاق B2 ممکن است به صورت افقی یا عمودی تغییر شکل داده شود تا در پلان L شکل قرار گیرد ( شکل 5 ، پلان A در مقابل شکل 6 ، پلان B- برای پلان B را ببینید. حداقل بهینه کمتر انتخاب شده است. شکل 10نمونه اجراهای بهینهسازی و بهبود RMSE را برای طرحهای A، B و D نشان میدهد. در شروع فرآیند بهینهسازی، زمانی که مدلهای اتاق به اشتباه مقیاسبندی و قرار گرفتهاند، RMSE بالا است. با کاهش هزینه، حرکت های پذیرفته شده منجر به یک برنامه دقیق تر تا زمان همگرایی می شود.
شکل 10. بهینه سازی نمونه برای پلان های A ( چپ )، B ( مرکز ) و D ( راست ) که هزینه و RMSE را در مقابل تعداد تکرار نشان می دهد.
8.4. بحث محدودیت های مدل سازی
چندین محدودیت در این تحقیق باید برجسته شود. یکی از اشکالات قابل توجه این فرآیند مربوط به مدلسازی هندسی درگاهها است. در LoD4، مشخصات CityGML نمایش صریح «عناصر و دهانهها» را توصیه میکند [ 27 ]]. در این کار، این فضاهای باز به صورت هندسی مدلسازی نشدهاند، با موقعیت یک درگاه به صورت یک راس منفرد در امتداد هر لبه دیوار مجاور قرار دارد. بنابراین، تحقیقات بیشتر برای گنجاندن چنین اندازهگیریهایی برای برآورده کردن کامل توصیههای CityGML LoD4 مورد نیاز است. ایجاد خودکار ساده مدلهای هندسی درگاهها در صورتی امکانپذیر خواهد بود که یک شکل مستطیلی عمودی برای دهانه در نظر گرفته شود و در اکستروژن شکل اتاق گنجانده شود. در ادامه، ابعاد درگاه نیز ممکن است اندازهگیری شده و در بهینهسازی پلان گنجانده شود، که هم اطلاعات موقعیتی اضافی و هم امکان محدودیت سخت برای محدود کردن فضای جستجو به مناطقی که درها میتوانند در آن جا شوند را فراهم میکند.
روش پیشنهادی در اینجا محدود به طرحبندی ساختمان است که در آن مرز خارجی ساختمان را با سطح بالایی از جزئیات و دقت موقعیتی نشان میدهد. حتی با نقشهبرداری توپوگرافی در مقیاس بزرگ، مانند OS MasterMap، تعمیم شکل به این معنی است که این دادهها همیشه انعکاس دقیقی از مرز ساختمان نیستند. مثال کوچکی از این در پلان B (دیوار پایین سمت راست) آشکار است که می توان دید از شکل مستطیل واقعی منحرف می شود (همانطور که در پلان A مشاهده می شود). در برخی شرایط، چنین مسائلی ممکن است با کنترلهای رابط کاربری ساده برای اصلاح ردپاها اصلاح شوند (به عنوان مثال، یک برآمدگی غیرضروری در ردپا میتواند به عقب برگردد یا حذف شود تا دو بخش از دیوار به صورت هم خطی شوند). در حالی که این شامل تعامل کاربر اضافی در بسیاری از موارد است، حداقل خواهد بود.
محصول MasterMap در این آزمایش ها به دلیل در دسترس بودن گسترده و دقت موقعیت آن انتخاب شد. دقت 1 متر اعلام شده است، اما این سطح بهبود قابل دستیابی را برای سیستمی با هدف 0.20 متر محدود می کند. در صورت وجود، استفاده از نمایش های با دقت بالاتر مانند مرزهای کاداستر مطلوب است. توجه به این نکته مهم است که این روش به استفاده از نقشه برداری توپوگرافی دو بعدی محدود نمی شود. با توجه به علاقه فزاینده آژانس های نقشه برداری ملی به محصولات داده های سه بعدی، می توان تصور کرد که مدل های ورودی مناسب از نمای بیرونی ساختمان با سطوح بالایی از جزئیات ممکن است به طور گسترده در دسترس باشند. برای مثال، با پیشرفتهای بیشتر در بازسازی خودکار مناطق شهری، مدلهای CityGML LoD3 ممکن است گستردهتر شوند. این مدل ها تعریف دقیق تری از شکل سه بعدی ساختمان ارائه می دهند.
9. نتیجه گیری و کار آینده
این مقاله روشی را برای ساخت پلان های ساخته شده از فضای داخلی ساختمان های مسکونی با استفاده از داده های حسگر تلفن همراه ارائه می کند. سهم اصلی رویکردی برای بهبود اندازهگیریهای غیردقیق فضای داخلی از طریق اعمال محدودیتهای نرم و سخت بر هندسه ساختمان است. این روش از بهینهسازی تصادفی برای بهبود مکرر دادههای پر سر و صدا با ترکیب اندازهگیریهای داخلی با ردپای ساختمانی با دقت بالا که از دادههای نقشهبرداری خارجی یا نقشه توپوگرافی منبع میشود، استفاده میکند. ما بهبودهای کیفیت ناشی از استفاده از روش خود را نشان دادیم و آنها را با یک روش ثبت نام ساده و ساده مقایسه کردیم.
به عنوان کار آینده، منابع اضافی داده و جنبههای ساختمانها ممکن است مدلسازی شوند تا بهبودهای تنظیمی اضافی را ارائه دهند. ادغام ابعاد عمودی و تنظیمات پلان چند سطحی سیستم را برای پشتیبانی بهتر از جنبه های سه بعدی ساختمان ها گسترش می دهد. در حال حاضر، این سیستم بر روی بهینهسازی دو بعدی هندسه تمرکز میکند، با مقادیر ارتفاع پس از تنظیم برای اهداف اکستروژن اضافه میشود. با این حال، ساختمان ها اغلب دارای دیوارهای ساختاری هستند که چندین طبقه را در بر می گیرند و بنابراین بررسی بیشتر در مورد پردازش سه بعدی امکان پذیر است. به عنوان مثال، دیوارهای مشترک ممکن است در یک بهینه سازی که در بسیاری از طبقات به طور همزمان محاسبه می شود، استفاده شود.
یکی دیگر از توسعه های مهم، امکان حل تعاملی اندازه گیری های داخلی در زمان واقعی است. این را می توان مستقیماً روی دستگاه با استفاده از GPU یا با استفاده از یک سرویس از راه دور با کارایی بالا به دست آورد. اندازهگیریهای غیردقیقی که در فرآیند تنظیم ثابت نشدهاند، میتوانند در محل شناسایی و دوباره اندازهگیری شوند.






بدون نظر