

چکیده
تلفن های هوشمند مدرن یک پلت فرم عالی برای خدمات مبتنی بر مکان (LBS) هستند. در حالی که LBS فضای باز برای گوشی های هوشمند بسیار موفق بوده است، LBS داخلی برای گوشی های هوشمند به دلیل عدم وجود فناوری موقعیت یابی دقیق هنوز به طور کامل توسعه نیافته است. در این مقاله ما یک رویکرد موقعیتیابی داخلی دقیق برای گوشیهای هوشمند تجاری (COTS) ارائه میکنیم که از توانایی ذاتی تلفنهای همراه برای تولید اولتراسوند، همراه با سه لایه ناهمزمان زمان-تفاوت ورود (TDOA) استفاده میکند. ما رویکرد موقعیت یابی داخلی خود را با توصیف نقاط قوت و ضعف آن ارزیابی می کنیم و دقت مطلق آن را تعیین می کنیم. این از طریق طیف وسیعی از آزمایشها انجام میشود که شامل متغیرهایی مانند موقعیت میکروفون نقطه کنترل، موقعیت تلفن در داخل اتاق، جهت بلندگو رو به رو است و حضور کاربر در مسیر سیگنال. نتایج آزمایش نشان می دهد که سیستم موقعیت یابی تلفن همراه Lok8 (موقعیت) ما می تواند در یک محیط واقعی به دقت بهتر از 10 سانتی متر دست یابد.
کلید واژه ها:
موقعیت یابی داخلی موبایل ; سونوگرافی ؛ LBS ; حداقل مربعات سه لایه ; TDOA
1. مقدمه
سرویسهای مبتنی بر مکان (LBS) موقعیت کاربر را به عنوان ورودی میگیرند و از آن اطلاعات برای تنظیم خروجی آنها استفاده میکنند تا کار مرتبطتر شود. LBS فضای باز و داخلی معمولاً به عنوان دو حوزه مجزا در نظر گرفته می شوند، احتمالاً به این دلیل که روش های موقعیت یابی در فضای باز معمولاً در داخل خانه به خوبی کار نمی کنند. عوامل متعددی وجود دارد که LBS در فضای باز را به یک محیط ایده آل برای توسعه برنامه های کاربردی ارزش افزوده تبدیل می کند:
-
GPS بیشتر در همه جا در خارج از منزل کار می کند. در محیط های شهری با موقعیت یابی GSM و Wi-Fi بهبود یافته است تا قابل اطمینان تر شود. این بدان معناست که هیچ زیرساخت جدیدی برای ظهور برنامه های کاربردی جدید لازم نیست.
-
یک مدل توزیع نرم افزار به خوبی تعریف شده وجود دارد. همه سیستم عامل های اصلی تلفن همراه دارای بازارهای نرم افزاری آنلاین مانند اپ استور و گوگل پلی هستند که فوراً در دسترس تلفن های هوشمند قرار می گیرند.
-
یک مدل تولید محتوا به خوبی تعریف شده است. صاحبان کسب و کار علاقه مند هستند که جزئیات آنها در سرویس های محبوب مبتنی بر مکان در دسترس باشد. مانند Yelp برای کافه ها و رستوران ها یا Booking.com برای هتل ها. این بدان معنی است که یک سرویس به اندازه کافی محبوب نیازی به به روز رسانی پایگاه داده خود ندارد زیرا این کار برای آنها انجام می شود.
-
گوشی های هوشمند مدرن دارای صفحه نمایش لمسی با وضوح بالا هستند و می توانند محتوای چندرسانه ای متنوعی را در قالب متن، صدا و ویدئو ارائه دهند.
در حالی که بسیاری از ساختمانهای عمومی وجود دارند که میتوانند از LBS داخلی بهرهمند شوند، مانند موزهها، فرودگاهها، بیمارستانها و دانشگاهها، عوامل متعددی وجود دارد که ظهور چنین خدماتی را مشکلساز میکند. به عنوان مثال، برای ظهور LBS داخلی، ابتدا باید یک سیستم موقعیت یابی جایگزین برای GPS نصب شود – یک مانع نه چندان مهم. علاوه بر این، گوشیهای هوشمند امروزی هنوز سختافزار تخصصی برای موقعیتیابی داخل ساختمان نصب نکردهاند و سختافزار استاندارد تلفن همراه میتواند در بهترین حالت تنها دو تا سه متر دقت مکانی را ارائه دهد. در نتیجه، سیستمهای تعیین موقعیت داخلی دقیق (محدوده سانتیمتری) از سختافزار تخصصی استفاده میکنند که در تلفنهای امروزی موجود نیست. اگرچه این سیستم ها می توانند موقعیت را با دقت زیادی تعیین کنند، اما هیچ سود فوری برای کاربر ندارند.
همچنین، در مواردی که سخت افزار سفارشی مورد نیاز است، کاربران به راحتی آن را در اختیار ندارند، بنابراین باید در اختیار آنها قرار گیرد. از آنجایی که خطر شکستن، گم شدن یا سرقت دستگاه توسط کاربر وجود دارد، قیمت بسیار پایینی وجود دارد که شرکت های ارائه دهنده LBS داخلی مایل به پرداخت هر دستگاه هستند. به عنوان مثال، در حال حاضر به نظر می رسد محبوب ترین پیکربندی برای راهنماهای موزه مجازی، صفحه کلیدی برای وارد کردن شماره یک نمایشگاه همراه با یک بلندگو باشد. در مقایسه با قابلیتهای تلفن هوشمند مدرن، چنین دستگاههای ابتدایی به شدت تجربه ناوبری کاربر را محدود میکنند و تعامل را نشان میدهند.
هدف ما این است که موقعیتیابی دقیق داخل ساختمان ( یعنی زیر متر) را در تلفنهای هوشمند تجاری خارج از قفسه ممکن کنیم و این دستگاهها را به پلتفرمهای عالی برای LBS داخلی تبدیل کنیم. چنین LBS مزایای زیر را خواهد داشت: از مکان دقیق کاربر آگاه است و بنابراین قادر به دادن مسیرهای دقیق است. بسیار انعطاف پذیر است و دارای قابلیت های چند رسانه ای قدرتمند است. هر کسی که یک گوشی هوشمند دارد از قبل تمام سخت افزار لازم برای استفاده از برنامه های LBS داخلی را دارد. نمونه هایی از یک سناریوی کاربری احتمالی برای یک گوشی هوشمند داخلی LBS در بخش بعدی آورده شده است.
2. سناریوی کاربر
سناریوی کاربری زیر نمونهای از این است که چگونه موقعیتیابی در سطح سانتیمتری، همراه با چند رسانهای تلفن هوشمند و قابلیتهای شبکه میتواند برای ارائه مؤثر انواع خدمات مبتنی بر مکان استفاده شود. در یک موزه تاریخ، یک اطلاعیه در ورودی وجود دارد که می گوید موزه مجهز به زیرساخت تور مجازی/ناوبری تلفن هوشمند است. یک کد QR زیر پیام وجود دارد. کاربر کد QR را اسکن می کند که برنامه مورد نیاز را نصب می کند. سپس سیستم تجربه کاربر را به روش های زیر افزایش می دهد:
-
کاربر متوجه یک گلدان کوچک قرن دوازدهمی می شود و تصمیم می گیرد درباره آن اطلاعات بیشتری کسب کند. او تلفن را به سمت گلدان نشانه می گیرد تا پرس و جوی جهتی را آغاز کند. گلدان در بالای قفسه ای در یک ردیف در میان گلدان های دیگر قرار دارد. به لطف موقعیت یابی با دقت بالا همراه با خوانش های شتاب سنج (شیب) و قطب نما دیجیتال (زیموت)، سیستم قادر به شناسایی گلدان صحیح است. گوشی هوشمند صفحهای را با توضیح مختصری از نمایشگاه به همراه پیوندهایی به متن، صدا، ویدیو و سایر مطالب تعاملی مرتبط نمایش میدهد. کاربر با بهره گیری از قابلیت های چندرسانه ای قدرتمند گوشی هوشمند خود، به تصاویر محل حفاری نگاه می کند و حتی ویدیویی از حفاری نمایشگاه را تماشا می کند.
-
کاربر متوجه نقاشی ای می شود که قبلا دیده است. او پرس و جوی جهت دار انجام می دهد و متوجه می شود که توسط کلود مونه، یک امپرسیونیست است. کاربر تصمیم می گیرد درباره امپرسیونیسم بیشتر بخواند و از طریق اتصال 3G در تلفن همراه خود به صفحه ویکی پدیا دسترسی پیدا می کند. او تصمیم می گیرد که می خواهند نقاشی های امپرسیونیست بیشتری ببینند و از برنامه موزه می خواهد که او را راهنمایی کند. این سیستم کارآمدترین مسیر را برای پوشش تمام نقاشی های مربوطه از مکان فعلی کاربر ایجاد می کند. به لطف موقعیت یابی با دقت بالا، این سیستم قادر است مکان نقاشی بعدی را بر روی صفحه نمایش ترسیم کند، که ناوبری را راحت تر می کند و از سردرگمی جلوگیری می کند. برخی از امپرسیونیست های برجسته در این موزه حضور ندارند،
-
کاربر نیاز به یافتن حمام را احساس می کند. او دکمه مربوطه را در برنامه موزه تلفن همراه فشار می دهد. این سیستم نزدیکترین حمام را پیدا کرده و با نمایش نقشه، مکان فعلی، مسیر و مسیرها، آنها را به آنجا راهنمایی می کند.
-
کاربر متوجه می شود که به کمک کارکنان موزه نیاز دارد. او دکمه مربوطه را فشار می دهد و به او اطلاع می دهد که در جای خود بماند و به زودی به آنها کمک می شود. این سیستم نزدیکترین کارمند را که دارای یک گوشی هوشمند با نسخه کارکنان برنامه است، پیدا میکند و به سرعت به محل کاربر نیازمند هدایت میشود.
در مجموع، تجربه جدید موزه غوطه ور شدن را با ملموس بودن بازدید از موزه سنتی، به علاوه انعطاف پذیری، غنا و جامعیت گشت و گذار آنلاین ترکیب می کند. در حالی که سایر ویژگی های سیستم می تواند بازدید را راحت تر و ایمن تر کند.
3. کارهای مرتبط
این بخش روشهای موقعیتیابی را معرفی میکند که برای سختافزار تلفنهای هوشمند تجاری خارج از قفسه (COTS) امروزی قابل اجرا هستند. اجزای سختافزاری که در همه گوشیهای هوشمند مدرن یافت میشوند، روشهای موقعیتیابی که بر این سختافزار متکی هستند و همچنین محدودیتهای فناوری زیربنایی، مورد بحث و مقایسه قرار میگیرند.
در میان روشهای موقعیتیابی مورد استفاده برای مکانیابی گوشیهای هوشمند، روشهایی که شامل استفاده از سیگنالهای فرکانس رادیویی (RF) هستند، رایجترین روشها هستند. چهار حسگر سخت افزاری RF که معمولاً در تلفن های هوشمند مدرن یافت می شوند عبارتند از GPS، GSM، Wi-Fi و بلوتوث. موقعیت را می توان با استفاده از یکی از ویژگی های زیر یک سیگنال RF محاسبه کرد: زمان رسیدن (ToA)، قدرت سیگنال دریافتی (RSS)، نرخ خطای بیت (BER) و زاویه ورود (AoA).
زمان رسیدن RF با استفاده از ساعت های بسیار دقیق و هماهنگ سازی بسیار دقیق همراه است زیرا سیگنال های RF با سرعت نور حرکت می کنند. سخت افزار طراحی شده در درجه اول برای انتقال داده ها برای این روش موقعیت یابی بهینه نیست. GPS تنها سنسوری است که معمولاً در گوشیهای هوشمند یافت میشود که برای تشخیص دقیق ToA سیگنال RF طراحی شده است. از آنجایی که سیگنالهای ارسال شده از ماهوارههای GPS پس از عبور از سقف و دیوار بسیار ضعیف هستند، موقعیتیابی GPS داخلی از شبهدولیتها استفاده میکند. در حال حاضر، استفاده از شبهدولیتها با تعدادی مشکلات همراه است: کاذبها نسبتاً گران هستند و به سختی به دست میآیند، آنها تمایل دارند با گیرندههای GPS تجاری تداخل داشته باشند، و با حسگرهای GPS موجود در گوشیهای هوشمند ناسازگار هستند [ 1 ]. با وجود این محدودیت های سخت افزاری، توسط Hoene نشان داده شدو همکاران که ToA را می توان با Wi-Fi استفاده کرد [ 2 ]. این تکنیک هنوز بر روی تلفنهای هوشمند آزمایش نشده است و دقتی قابل مقایسه با روشهای مبتنی بر Wi-Fi معمولی را گزارش میکند (مثلاً ۴± متر).
از نظر تئوری یک رابطه معکوس بین قدرت سیگنال دریافتی و مسافت طی شده وجود دارد [ 3]. RSS پرکاربردترین پارامتر در سیستم های موقعیت یابی مبتنی بر GSM یا Wi-Fi است و روش های مختلفی برای محاسبه موقعیت وجود دارد. خوانش RSS برای چندین نقطه کنترل را می توان برای هر مکان منحصر به فرد داخلی در فرآیندی به نام اثر انگشت جمع آوری کرد. اگر تعداد نقاط دسترسی کافی باشد و شبکه اثر انگشت خیلی متراکم نباشد، هر قرائت اثرانگشت منحصر به فرد خواهد بود، در این صورت می توان به سادگی خواندن را به نقطه ای از شبکه نسبت داد. از آنجایی که چنین موقعیتیابی فقط به اندازه متراکم بودن شبکه آن دقیق است، جمعآوری تمام اثر انگشتهای مورد نیاز مستلزم تلاش دستی زیادی است. همچنین برای فیلتر کردن نویز نیاز به خوانش های متعدد در هر نقطه وجود دارد.
تعداد اثر انگشت های مورد نیاز را می توان با ایجاد مدلی برای پیش بینی میزان قرائت های RSS در مکانی که اثر انگشت انجام نشده است، کاهش داد. دو راه متمایز برای تولید چنین مدل پیش بینی وجود دارد. یک مدل انتشار موج را می توان ایجاد کرد که میزان کاهش موج را در هنگام عبور از موانع و فضای خالی در نظر می گیرد. در مطالعه ای که توسط Mestre و همکاران انجام شد. نشان داده شد که با این رویکرد می توان از انگشت نگاری به طور کلی اجتناب کرد [ 4 ]. متناوبا، خواندن RSS را می توان با کمک یک مدل ریاضی پیش بینی کرد. فریس و همکاران نشان داده اند که می توان این کار را با فرآیندهای گاوسی (GP) به دقت انجام داد [ 5]. یک یافته مهم این بود که پزشک عمومی قادر است مدل را به اتاق هایی که در مرحله آموزش پوشش داده نشده اند، به دقت تعمیم دهد.
روشهای موقعیتیابی داخلی در ادبیات که بر نرخ خطای بیت (BER) تکیه میکنند، به عنوان یک گزینه مناسب به نظر نمیرسند. تغییرات در BER محصول جانبی تغییرات RSS است و به دلیل ماهیت تصادفی آنها حتی همبستگی بدتری با فاصله دارد. ممکن است استفاده از BER در جایی که قدرت سیگنال اولیه بدست نمی آید عملی باشد، در غیر این صورت RSS پارامتر قابل اطمینان تری است.
روشهای Angle of Arrival از جهتی استفاده میکنند که سیگنال از آن میرسد تا موقعیت را از طریق مثلثسازی تعیین کند. تعیین مسیری که سیگنال از آن در تلفن هوشمند COTS رسیده است، امکان پذیر نیست زیرا آنتن های جهت دار ندارد. تنها سناریویی که می تواند کار کند زمانی است که یک تلفن سیگنال RF تولید می کند که در نقاط کنترل با چنین آنتن هایی دریافت می شود. دو سیستم موقعیت یابی قابل توجه وجود دارد که از AoA با بلوتوث استفاده می کنند و به دقت خوبی دست می یابند. مادیو و همکاران نشان داد که یک چراغ بلوتوث را می توان با دقت یک تا دو متر قرار داد [ 6 ]. موقعیت یابی با دقت 20 سانتی متر توسط موقعیت یابی داخلی با دقت بالا (HAIP) نوکیا با استفاده از بلوتوث 4.0 نشان داده شد [ 7 ]]. متاسفانه بلوتوث 4 در حال حاضر در اکثر گوشی های هوشمند یافت نمی شود. همچنین مشخص نیست که آیا و چه زمانی این فناوری در گوشی های هوشمند تولید نشده توسط نوکیا در دسترس خواهد بود.
موقعیت یابی داخلی با استفاده از GSM دارای محدودیت های قابل توجهی است. ایستگاههای پایه موجود (برجهای GSM) از هم فاصله زیادی دارند و معرفی ایستگاههای پایه جدید نمیتواند مستقل از یک حامل انجام شود. دقت پنج متر، یکی از بهترین نتایج برای موقعیت یابی GSM داخلی، توسط Otsason و همکاران نمایش داده شد. با کمک انگشت نگاری گسترده با قدرت سیگنال [ 8 ]. متأسفانه به دلیل محدودیت های سیستم عامل، اثر انگشت با قدرت سیگنال گسترده در بسیاری از تلفن های مدرن غیرممکن است. سایر روش های موقعیت یابی GSM به دلیل دقت ضعیف عموماً برای استفاده در داخل ساختمان غیر عملی هستند.
موقعیت یابی Wi-Fi حداقل دو برابر دقیق تر از GSM است. به طور کامل مورد تحقیق قرار گرفته و حتی توسط چند شرکت به صورت تجاری اجرا شده است. با گسترش تدریجی ناوبری Google در داخل خانه برای Google Maps، که از قبل بر روی همه دستگاههای اندرویدی نصب شده است، اثرانگشت Wi-Fi احتمالاً به یک استاندارد واقعی برای موقعیتیابی داخلی موبایل تبدیل میشود [ 9 ].
بلوتوث کوتاه ترین برد را در بین سه فناوری بی سیم دارد. در عین حال، سختافزار بلوتوث بهطور قابلتوجهی ارزانتر از سختافزار Wi-Fi است، که شبکه نقطه کنترل متراکم را مقرون به صرفه میکند. در حال حاضر، استفاده از اندازهگیریهای RSS با بلوتوث پیچیده است، زیرا برای تنظیم قدرت سیگنال در زمانی که سیگنالها خیلی قوی یا خیلی ضعیف میشوند، طراحی شده است، و هرگونه اندازهگیری فاصله بعدی بر اساس قدرت سیگنال را غیرقابل اعتماد میکند. غیرفعال کردن این حلقه بازخورد توسط ژو و همکاران مورد بحث قرار گرفته است. [ 10 ]. یک رویکرد جایگزین اندازه گیری RSS در طول مرحله پرس و جو است که از توان انتقال استاتیک استفاده می کند اما منجر به نرخ به روز رسانی کمتر می شود [ 11 ]]. با این حال بلوتوث AoA با موفقیت بیشتری استفاده شده است. برخی از مطالعات نشان میدهند که اگر شناسه دستگاه بلوتوث هدف مشخص باشد، دو دستگاه میتوانند مستقیماً به مرحله «صفحهبندی» بروند و از فاز «کشف» 10 ثانیهای اجتناب کنند [ 12 ، 13 ]. در غیر این صورت، یک کاربر به طور بالقوه میتواند سریعتر از آن چیزی که تلفنش میتواند اتصال برقرار کند، از طریق یک فانوس دریایی عبور کند.
علاوه بر امواج الکترومغناطیسی، تلفن های هوشمند می توانند امواج صوتی را از طریق بلندگو(های) و میکروفون خود ارسال و دریافت کنند. در مقایسه با امواج الکترومغناطیسی (نور)، صدا بسیار کندتر حرکت می کند و استفاده از زمان پرواز برای تعیین موقعیت، حتی در سخت افزارهایی که برای موقعیت یابی طراحی نشده اند، کاربردی تر است. پنگ و همکاران [ 14 ] نشان داد که می توان از صدا برای اندازه گیری فاصله بین دو تلفن همراه با استفاده از تکنیک های همگام زمان رسیدن استفاده کرد. اگرچه سخت افزار تلفن همراه برای مقابله با فرکانس های قابل شنیدن (زیر 20 کیلوهرتز) طراحی شده است، اما در واقع قادر به تولید فرکانس های نامفهوم تا 22 کیلوهرتز است. در مطالعه ای که توسط Borriello et al. [ 15] نشان داده شد که سیگنال اولتراسونیک را می توان از یک دستگاه تلفن همراه منتشر کرد و با موفقیت توسط یک میکروفون معمولی ضبط کرد.
محدودیت های تولید سیگنال های اولتراسوند در تلفن های همراه در کار قبلی ما [ 16 ] مورد مطالعه قرار گرفت. مشاهده شد که همه تلفنهای همراه آزمایششده میتوانند با موفقیت سیگنالهای اولتراسونیک را بدون هیچ نویز شنیدنی تولید کنند، تا زمانی که تنظیمات صدای بلندگو زیر یک آستانه خاص باشد، که برای هر تلفن منحصر به فرد است. با هم، سرعت انتشار آهسته و پشتیبانی اولتراسوند به معنای موقعیت یابی در سطح سانتی متری بدون نویز در تلفن های هوشمند COTS امکان پذیر است و اساس رویکرد موقعیت یابی داخلی موبایل ما را تشکیل می دهد.
در حالی که سه لایه اولتراسوند تلفن های همراه در ادبیات ظاهر نشده است، نمونه های زیادی از سیستم های موقعیت یابی داخلی وجود دارد که از سخت افزار سفارشی برای ارسال و دریافت سیگنال های اولتراسونیک استفاده می کنند [ 17 ، 18 ، 19 ، 20 ، 21 ، 22 .]. این سیستم ها دقت در سطح سانتی متر یا حتی میلی متر را گزارش می دهند. سنسورها و گیرندههای مورد استفاده در چنین سیستمهای اولتراسونیک معمولاً در حدود 40 کیلوهرتز کار میکنند، فرکانسهایی بسیار بالاتر از آنچه بلندگوهای تلفن همراه استاندارد میتوانند تولید کنند. در مقایسه با فرکانسهای شنیدنی، صدا در این فرکانسها بهشدت جهتدار، نرخ تضعیف بالا و نفوذ ضعیف در مانع شناخته میشود. انتظار میرود محدوده 20 تا 22 کیلوهرتز موجود در تلفنهای هوشمند دارای برخی ویژگیها با فرکانسهای بالاتر باشد، اگرچه تا چه حد باید از طریق آزمایش تعیین میشد. نتایج تجربی جهت و نرخ تضعیف در بخش 5 توضیح داده شده است.
روش های موقعیت یابی که به انتشار سیگنال متکی نیستند نیز در گوشی های هوشمند امکان پذیر است. یکی از این روش ها بینایی کامپیوتری است. همه گوشی های هوشمند مدرن دارای یک دوربین در پشت گوشی و گاهی اوقات یک دوربین دوم در جلو هستند. بینایی کامپیوتر، در حالی که به طور بالقوه بسیار دقیق است، با بار محاسباتی بالا، عملکرد ضعیف در شرایط نور کم، روشهای پیچیده بازیابی از خرابیهای ردیابی، و حساسیت به لرزش دوربین و تاری حرکت مشخص میشود. این مشکلات در مطالعات انجام شده توسط ویلیامز و همکاران بررسی شده است. [ 23 ] و واگنر و همکاران. [ 24]. یکی دیگر از مشکلات مرتبط با بینایی کامپیوتر این است که کاربر هنگام استفاده از دستگاه، قرار است از طریق صفحه نمایش نگاه کند. به نظر می رسد در حال حاضر مکان یابی و نقشه برداری همزمان (SLAM) امیدوارکننده ترین تکنیک بینایی کامپیوتری باشد که توسط بسیاری به عنوان یک فناوری عملیاتی هنوز در مراحل ابتدایی خود در نظر گرفته می شود [ 25 ].
مغناطیسسنجها (قطبنمای دیجیتال)، شتابسنجها و ژیروسکوپها که اکنون حسگرهای رایجی هستند که در گوشیهای هوشمند یافت میشوند، میتوانند برای Dead Reckoning (DR) استفاده شوند. Dead Reckoning روشی برای تخمین موقعیت با پیش بینی مداوم جهت و سرعت جریان از موقعیت اولیه شناخته شده (ثابت) است [ 26 ]. جدا از رفع مشکل، که برای مثال میتوان آن را از یک تگ RFID غیرفعال واقع در درگاه به دست آورد، یک سیستم DR فقط به یک جریان ثابت اطلاعات در مورد جهت و سرعت جریان نیاز دارد.
روش های مختلفی برای تخمین سرعت جریان با استفاده از شتاب سنج ها وجود دارد، ساده ترین روش نظارت بر شتاب یا کاهش سرعت واحد است. متأسفانه شتاب سنج ها نسبت به ارتعاشات بسیار حساس هستند که مشکل بزرگی برای دستگاه های تلفن همراه است. مشکل دیگر این است که، مشابه ژیروسکوپها، شتابسنجها نرخ تغییر در سرعت حرکت را ثبت میکنند، که منجر به ایجاد خطای موقعیتیابی در طول زمان میشود [ 25 ]، بهویژه اگر کاربر هنگام راه رفتن دستگاه را در کنار خود بچرخاند یا اغلب آن را بگیرد. آن را در / از جیب خود و غیره
استفاده بسیار مطمئن تر از شتاب سنج ها برای تخمین حرکت عابر پیاده، تشخیص گام است. سنبلههای شتاب برای تشخیص اینکه کاربر یک قدم برمیدارد یا نه، استفاده میشود. در مطالعه ای که توسط Randell et al. [ 27 ] نشان داده شد که در صورتی که کاربر نوعی آموزش را دریافت کند، Dead Reckoning عابر پیاده می تواند دقت بهتری نسبت به GPS در مسافت های کوتاه ارائه دهد. با این حال، اگر یک کاربر آموزش ندیده به چنین سیستمی مجهز شود، نتایج بدتر است [ 28 ]. مشکل دیگر DR داخلی این است که مغناطیسسنجها میتوانند در داخل خانه بسیار غیرقابل اعتماد باشند، که تخمین جهت را به منبع اصلی خطا تبدیل میکند [ 27 ].
مقایسه سیستم های موقعیت یابی داخلی معاصر در جدول 1 آورده شده است. این نشان میدهد که راهحلهای موجود در تلفنهای همراه عمدتاً از فناوریهای RF استفاده میکنند، اما هنوز قادر به عبور از آستانه دقت یک متر نیستند. در عین حال، سیستمهای مبتنی بر اولتراسوند دارای سطوح دقت سانتیمتری و میلیمتری هستند، اما با گوشیهای هوشمند COTS سازگار نیستند. راهحل ما (Lok8) بهترینهای هر دو را ترکیب میکند، انعطافپذیری چندوجهی گوشیهای هوشمند را با دقت موقعیتیابی و استحکام سهلایهبندی اولتراسوند مبتنی بر حداقل مربعات گرد هم میآورد.

جدول 1. مقایسه دقت سیستم موقعیت یابی داخلی.
4. روشهای حداقل مربعات برای تفاوت زمان رسیدن اولتراسوند (TDOA)
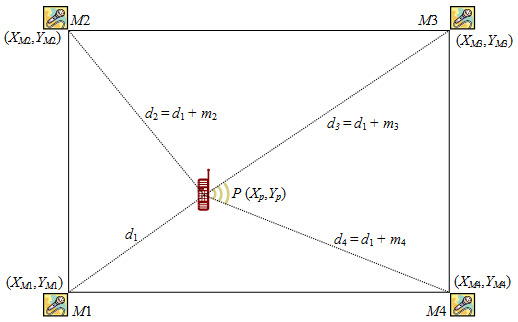
در سناریوی ما برای مکان یابی سریع و دقیق یک تلفن همراه در داخل خانه، رویکردهای ToA (زمان ورود) یا همزمان نیاز دارند که زمانهای دو سیستم مجزا با دو ساعت مجزا همگام شوند – یک منبع اصلی خطا. به این ترتیب، مطلوب است که فقط زمان رسیدن سیگنال در هر یک از میکروفون ها مقایسه شود و زمان ارسال سیگنال از تلفن به طور کامل نادیده گرفته شود و Lok8 را به یک روش TDOA (تفاوت زمان رسیدن) یا ناهمزمان تبدیل کند. مشکل در شکل 1 نشان داده شده است و راه حل نهایی ماتریس به شرح زیر است. جزئیات بیشتر در مورد این رویکرد را می توان در [ 29 ، 30 ] یافت.
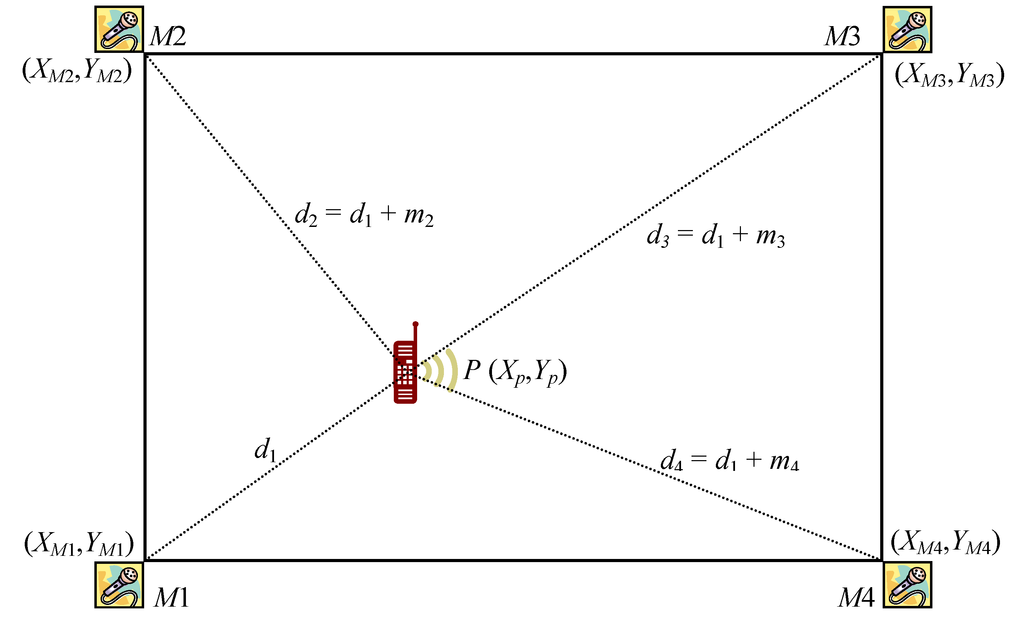
شکل 1. تفاوت زمانی سه لایه رسیدن. نقاط کنترل M 1، M 2، M 3 و M 4 موقعیت های میکروفون شناخته شده هستند. نقطه P موقعیت تلفن همراه ناشناخته است که ما در تلاش برای یافتن مختصات آن هستیم. خطوط d 1 , d 2 , d 3 و d 4 فواصل نامعلوم بین تلفن و هر میکروفون هستند. با این حال، آنچه شناخته شده است تفاوت بین سه اندازه گیری است: m 2 ، m 3 و m 4 .
مسئله:

-
تلفن همراه ( P ) موقعیت نامشخصی دارد ( X P , Y P ).
-
چهار میکروفون ( M 1, M 2, M 3, M 4 ) موقعیت های شناخته شده ای دارند ( X M 1 , Y M 1 ), ( X M 2 , Y M 2 ), ( X M 3 , Y M 3 ), ( X M 4 ، Y M 4 ).
-
چهار فاصله ( d 1 , d 2 , d 3 , d 4 ) از P تا M 1 , M 2 , M 3 , M 4 ناشناخته هستند اما تفاوت بین آنها ( m 2 , m 3 , m 4 ) به روش اولتراسونیک اندازه گیری می شود. این مشاهدات هستند.
-
مختصات P = ( X P , Y P ) را با حل یک سیستم معادلات (مدل ریاضی) که m = سه مشاهده ( m 2 , m 3 , m 4 ) را به n = دو پارامتر مجهول ( X P , Y P ).
راه حل:
-
اگرچه مختصات P را میتوان با استفاده از خوانشهای تنها از سه میکروفون (دو مشاهده) پیدا کرد، اما چهار میکروفون یا بیشتر را میتوان به طور موثر در روش حداقل مربعات برای تعیین محتملترین مقدار (MPV) برای مختصات P بهعلاوه یک استفاده کرد. انحراف استاندارد برای MPV. معادلات مشاهده در روش های ماتریسی برای حداقل مربعات به صورت زیر نمایش داده می شوند:

جایی که در مورد ما:
-
m = 3، n = 2
-
m A n حاوی ضرایب مجهولات است( XP , Y P )
-
n X 1 شامل اصلاحاتی است که باید در برآوردهای اولیه برای مجهولات اعمال شود ( d X P , d Y P )
-
m L 1 شامل اندازه گیری ها ( m 2 , m 3 , m 4 )
-
m V 1 حاوی باقیمانده ها است (یکی برای هر اندازه گیری)
حل X جواب را می دهد:
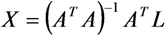
جایی که:

ماتریس X شامل اصلاحاتی است که باید در برآوردهای اولیه برای ( XP ، Y P ) اعمال شود. این مختصات جدید ( X P , Y P ) سپس برای محاسبه مجدد فواصل به روز شده برای . این فرآیند تا زمانی تکرار می شود که مختصات ( X P ، Y P ) به طور قابل توجهی تغییر نکند (به عنوان مثال، در 3 رقم اعشار برای دقت میلی متر). تخمین های اولیه برای X P و Y P را می توان به میانگین مختصات x و y چهار میکروفون تنظیم کرد، و سپس d 1 با استفاده از فیثاغورث در X P و Y P محاسبه می شود :
 سپس d 1 با استفاده از فیثاغورث در X P و Y P محاسبه می شود :
سپس d 1 با استفاده از فیثاغورث در X P و Y P محاسبه می شود :

به طور مشابه می توان محاسبه کرد:




5. آزمایش محدوده سونوگرافی موبایل
در حالی که صدا با سرعت یکسان در همه جهات منتشر می شود، نمی توان همین را برای شدت گفت. سونوگرافی بسیار جهت دار است، به این معنی که شدت صدا در جلوی بلندگو بسیار بیشتر از طرفین و پشت بلندگو است. این به این معنی است که حداکثر فاصله ای که یک سیگنال می تواند تشخیص دهد در مقایسه با هر جهت دیگر، در صورتی که میکروفون رو به بلندگو قرار گیرد، به طور قابل توجهی طولانی تر است. از آنجایی که کاربر آزاد است تا تلفن را به صورت تصادفی جابجا کند و بچرخاند، حداکثر فاصله عملکردی، طولانیترین فاصلهای است که یک سیگنال از هر جهت میتواند تشخیص دهد.
5.1. روش آزمایش
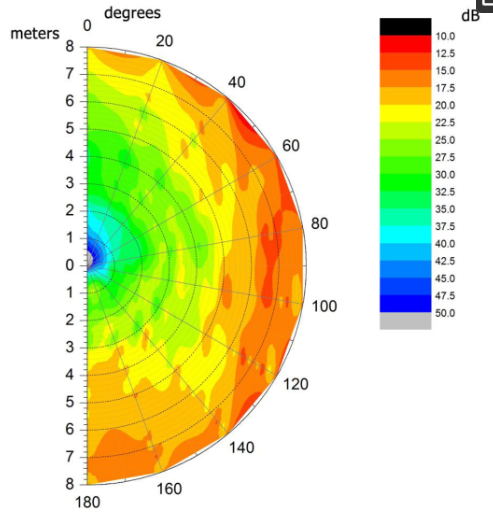
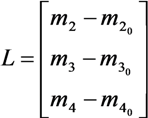
برای این آزمایش برد، تلفن HTC-G1 در مرکز یک اتاق بزرگ قرار گرفت. ناحیه 360 درجه اطراف تلفن به هجده بخش 20 درجه تقسیم شده است. این ناحیه توسط دایره های متحدالمرکز با فاصله 20 سانتی متری تقسیم می شود. 40 مورد از این دایره ها وجود دارد که باعث می شود شعاع منطقه تحت پوشش آزمایش در همه جهات 8 متر باشد. شدت سیگنال در یک جهت معین و فاصله از تلفن با قرار دادن میکروفون در محل مربوطه و نشان دادن آن در جهت گوشی اندازه گیری شد. از آنجایی که انتشار سیگنال دارای تقارن چرخشی حول محوری است که بلندگو رو به آن قرار دارد، ضبط تنها برای 180 درجه انجام شد. در مجموع 400 ضبط انجام شد. تمام سیگنال ها با نرخ نمونه برداری 192 کیلوهرتز و عمق 24 بیتی با استفاده از سیستم ضبط قابل حمل TASCAM HD-P2 ضبط شدند.شکل 2 ، که در آن سمت چپ “غایب” تصویر آینه ای از سمت راست نشان داده شده است.
شکل 2. نمودار خطوط قطبی برای انتشار انرژی اولتراسوند. نیم دایره نمای بالا به پایین ناحیه 180 درجه اطراف تلفن را تا فاصله 8 متری نشان می دهد. مقدار رنگی نشان دهنده سطح شدت انرژی در دسی بل است.
5.2. بحث
از نمودار کانتور می توان مشاهده کرد که انتشار شدت صدا برای سطوح شدت صوت بالای 40 دسی بل بسیار جهت دار است و از شکل یک کاردیود پیروی می کند. این برای فرکانس های بالا معمولی است. توزیع انرژی زیر 40 دسی بل کمتر جهت دار به نظر می رسد و شبیه ساب کاردیوئید است. در نهایت، در کل آزمایش تنها یک مقدار زیر 10 دسی بل ثبت شد. این بسیار بالاتر از مولفه 21.5 کیلوهرتز نویز پس زمینه است که حدود 1 دسی بل است. این بدان معنی است که سیگنال اولتراسونیک گوشی هوشمند را می توان به طور قابل اعتماد از هر جهت در شعاع 8 متری تشخیص داد. با این حال، هیچ تضمینی وجود ندارد که حداکثر مقدار متعلق به سیگنالی باشد که از طریق مسیر مستقیم و نه از طریق چند مسیر طولانی تر وارد شده است. مشروط بر اینکه قرائت ها به سیگنالی تعلق داشته باشند که از طریق مسیر مستقیم رسیده است، قرار دادن میکروفون در هر گوشه اتاقی با ابعاد 8± متر مربع کافی است. به این ترتیب، تلفنی که در هر نقطه از اتاق قرار می گیرد، همیشه در محدوده 8 متری هر چهار میکروفون قرار می گیرد.
6. دقت موقعیت یابی
هدف از آزمایشهایی که در این بخش توضیح داده شده است، یافتن دقت موقعیتیابی یک تلفن همراه است که سیگنال اولتراسوند را منتشر میکند که با استفاده از چهار نقطه کنترل میکروفون که درست زیر هر گوشه سقف (ارتفاع 2.83 متر) یک اتاق 7 × 7 متر قرار گرفتهاند، محاسبه میشود. سیگنال اولتراسوند از یک “بیپ” بسیار کوتاه 21.5 کیلوهرتز تشکیل شده است. جزئیات بیشتر در مورد طراحی سیگنال اولتراسوند مورد استفاده را می توان در [ 30 ] یافت.
سه آزمایش انجام شد. در آزمایش 1، میکروفون ها و تلفن در یک ارتفاع، 0.12 متر زیر سقف قرار گرفتند. این آزمایش دقیقاً سناریوی ارائه شده در [ 29 ] را دنبال می کند، که در آن تلفن و میکروفون ها همه در یک صفحه هستند. در آزمایش 2، تلفن تا ارتفاع سینه پایین آمد و آن را تقریباً 1.6 متر زیر سطح میکروفون قرار داد. در مقایسه با آزمایش 1 هیچ تغییری در الگوریتم های سه لایه انجام نشد. در طول آزمایش 3، تلفن در همان ارتفاع آزمایش 2 باقی ماند، اما یک “ضریب کالیبراسیون اتاق” در الگوریتم های سه لایه به منظور کاهش هر گونه تاثیر ارتفاع وارد شد. تفاوت در دقت
6.1. روش آزمایش
میکروفونهای DPA دقیقاً زیر هر گوشه سقف قرار گرفته بودند و به گوشه طبقه مقابل اتاق اشاره میکردند. همه میکروفون ها به کارت صوتی Avid Mbox Pro متصل شدند که از ورودی همگام سازی چهار کاناله پشتیبانی می کند. کارت صوتی بیشتر به رایانه شخصی متصل شد که نرم افزار سه لایه ناهمزمان توسعه یافته در این پروژه را اجرا می کرد.
این نرم افزار از RtAudio API برای ورودی/خروجی صدای بلادرنگ استفاده می کند. از طریق بسته بندی جاوا JRtAudio قابل دسترسی است که امکان نمونه سازی سریع رابط کاربری گرافیکی در جاوا را فراهم می کند. در رایانه شخصی، RtAudio API از درایورهای DirectSound یا ASIO پشتیبانی می کند. پشتیبانی ASIO برای ما ضروری بود زیرا پخش بیش از دو کانال با DirectSound بسیار چالش برانگیز بود. جریان های صوتی از کارت صدا در یک بافر نوشته می شوند و از طریق فیلتر باند گذر پردازش می شوند. ما فیلتر گذر باند Bessel [ 31 ] را با مرتبه فیلتر 4، فرکانس گوشه یک = 21400 هرتز و فرکانس گوشه دو = 21600 هرتز دریافتیم که بهترین پاسخ را به خروجیهای سیگنال اولتراسونیک ذاتی تلفن دارد. این همه فرکانس های دیگر را فیلتر می کند و (تقریبا) فقط فرکانس سیگنال را باقی می گذارد.
سیگنال اولتراسوند با نرخ نمونه برداری 96000 بیت در ثانیه پخش می شود. با فرض اینکه سرعت صوت در دمای معمولی اتاق 346 متر بر ثانیه است، هر نمونه باید معادل 3.6 میلی متر طی شود (لازم نیست تغییرات دما را در نظر بگیریم زیرا تغییرات در دمای اتاق اداری عملاً ناچیز است). متأسفانه تنها یک نمونه از هر 10 نمونه فیلتر باند گذر، نمایش معتبری از شدت سیگنال است. 9 نمونه دیگر را می توان دور انداخت، زیرا محصول جانبی استفاده از یک فیلتر درجه پایین است. بنابراین وضوح واقعی سیستم 3.6 ضربدر 10 یا 36 میلی متر است. این پارامتر را می توان با استفاده از یک فیلتر مرتبه بالا بهبود بخشید، که به سخت افزار قدرتمندتری برای اجرا در زمان واقعی یا حتی استفاده از یک پردازنده سیگنال دیجیتال اختصاصی (DSP) نیاز دارد.
برای هر سه آزمایش، همان 10 مکان آزمایش یا نقطه چک انتخاب شد. مختصات دقیق این نقاط چک از قبل با دستگاه اندازه گیری لیزری اندازه گیری شد. سپس تلفن در هر یک از این مکانها قرار گرفت و بلندگوی اصلی آن مستقیماً به سمت بالا باشد. در آزمایش 1، تلفن 0.12 متر زیر سقف و در آزمایش 2 و 3 1.7 متر زیر سقف قرار داشت تا ارتفاع حمل معمولی را تقلید کند. برای آزمایش 3، نرم افزار موقعیت یابی Lok8 برای تطبیق ضرب در “ضریب کالیبراسیون اتاق” 1.1 برای هر تفاوت در تاخیر اصلاح شد. به نظر می رسد این مقدار تفاوت ارتفاع بین میکروفون و گوشی را به خوبی جبران می کند و با آزمون و خطا پیدا شد. در هر سه آزمایش، تلفن برای تولید یک “بوق” اولتراسونیک 100 بار در هر یک از 10 مکان چک با فاصله یک ثانیه بین بوق ها ساخته شد تا داده های اندازه گیری کافی برای تجزیه و تحلیل آماری ارائه شود. این سیگنالها توسط چهار میکروفون ضبط شده و توسط نرمافزار موقعیتیابی Lok8 پردازش شدند تا به طور مستقل مختصات منبع سیگنال برای هر سیگنال شناساییشده را تخمین بزنند. این مختصات و همچنین انحراف استاندارد برای روش سه لایه در فایل های متنی ثبت شد. این منجر به 3000 مطالعه شد. 300 در هر مکان نقطه چک منحصر به فرد، 1000 در هر آزمایش. این سیگنالها توسط چهار میکروفون ضبط شده و توسط نرمافزار موقعیتیابی Lok8 پردازش شدند تا به طور مستقل مختصات منبع سیگنال برای هر سیگنال شناساییشده را تخمین بزنند. این مختصات و همچنین انحراف استاندارد برای روش سه لایه در فایل های متنی ثبت شد. این منجر به 3000 مطالعه شد. 300 در هر مکان نقطه چک منحصر به فرد، 1000 در هر آزمایش. این سیگنالها توسط چهار میکروفون ضبط شده و توسط نرمافزار موقعیتیابی Lok8 پردازش شدند تا به طور مستقل مختصات منبع سیگنال برای هر سیگنال شناساییشده را تخمین بزنند. این مختصات و همچنین انحراف استاندارد برای روش سه لایه در فایل های متنی ثبت شد. این منجر به 3000 مطالعه شد. 300 در هر مکان نقطه چک منحصر به فرد، 1000 در هر آزمایش.
6.2. بحث
تمام 100 قرائت جمع آوری شده در هر نقطه چک در طول هر یک از سه آزمایش به عنوان یک نمونه در نظر گرفته شد. برای هر نمونه، بیشترین مقدار محتمل (MPV) محاسبه شد. تفاوت بین MPV و موقعیت واقعی نقطه چک و همچنین انحراف معیار آن را می توان در جدول 2 یافت .
جدول 2. تفاوت بین بیشترین مقدار احتمالی (MPV) و موقعیت واقعی ± انحراف استاندارد. ستون اول شامل شماره نقطه چک است که برای شناسایی هر یک از ده موقعیت تست شناخته شده استفاده می شود. ستون های 2، 3 و 4 حاوی خطا و انحراف معیار برای هر آزمون در هر یک از سه آزمایش هستند.
به طور متوسط، آزمایش 3 (سه بعدی سه بعدی با فاکتور کالیبراسیون اتاق) بهترین دقت و آزمایش 2 (سه بعدی سه بعدی بدون کالیبراسیون اتاق) بدترین را نشان داد. میانگین تفاوت در دقت بین آزمایشهای 1 (سه بعدی 2 بعدی) و 2 فقط حدود 14٪ است، در حالی که آزمایش 3 دارای دقت دو برابر 1 و بیش از دو برابر دقت 2 است. علاوه بر این، آزمایش 3 به طور متوسط دارای انحراف استاندارد کمتری است. جالب اینجاست که نقطه آزمایش 5 که در وسط اتاق قرار دارد، در هر سه آزمایش تقریباً همان خطا را داده است. به طور کلی، سه آزمایش دقت زیر متری پایداری را ایجاد کردند. فقط در آزمایش 2، بدترین قرائت (نقطه آزمون 10) بیش از نیم متر با موقعیت واقعی خود فاصله داشت، اگرچه وقتی میانگین با سایر قرائتها در این نقطه محاسبه شد، تنها 15 خطا ایجاد کرد. 3 سانتی متر آزمایش 3 به طور متوسط دارای دقت زیر دسی متر (<10 سانتی متر) بود.
به منظور تجزیه و تحلیل اینکه آیا یک جهت/الگوی سیستماتیک وجود دارد که در آن محاسبات سه لایه (به طور متوسط) در رابطه با موقعیت واقعی جابجا شده است، بردارهای پیکان ترسیم شده به مقیاس نشان دهنده فاصله، و جهت جابجایی خطا در پلان طبقه برای هر یک از آنها قرار داده شده است. سه آزمایش ( شکل 3). در آزمایش 1 روند مشخصی وجود ندارد که بردار خطا در آن رخ دهد، بنابراین بعید است که این بردار خطای سیستماتیک ایجاد شده باشد. در مقایسه با آزمایش 3، بردار خطا نسبتاً بزرگ است. به احتمال زیاد این نتیجه مستقیم قرار گرفتن تلفن همراه و میکروفون در یک صفحه است. بلندگوی تلفن مستقیماً به سمت بالا اشاره می کرد، بنابراین قرار گرفتن در همان صفحه به این معنی بود که منبع (بلندگوی تلفن همراه) تقریباً 90 درجه از هر میکروفون دور می شد. با توجه به ماهیت بسیار جهت دار اولتراسوند، این منجر به تشخیص سیگنال ضعیف تر و پایدارتر شد، حتی اگر فاصله متوسط تا هر میکروفون کوتاهتر بود. در دو آزمایش دیگر، تلفن تقریباً 1.6 متر پایینتر از میکروفونها بود و در نتیجه بلندگوی منبع در زاویهای کمتر از 90 درجه نسبت به میکروفونها قرار گرفت.
برای آزمایش 2، می توان مشاهده کرد که فلش ها بیشتر به سمت داخل، به سمت مرکز اتاق هستند – یک نتیجه قابل پیش بینی. در آزمایشهای 2 و 3، تأخیر بر اساس سیگنالهایی محاسبه میشود که از طریق دید مستقیم به دست میآیند، در حالی که موقعیت دوبعدی تلفن بر اساس نمایش این خطوط دید مستقیم بر روی یک هواپیمای دوبعدی محاسبه میشود. اختلاف ارتفاع بیشتر بین میکروفون و تلفن به طور کلی به معنای کاهش اختلاف در زمان رسیدن است و باعث می شود خوانش ها نزدیکتر به مرکز اتاق ظاهر شوند. متأسفانه، رابطه بین فاصله تا میکروفون و کاهش تاخیر خطی نیست، بنابراین لازم است موقعیت گوشی را قبل از محاسبه جبران مورد نیاز بدانیم. از آنجایی که در مورد ما موقعیت تلفن قبل از انجام سه لایه ناشناخته است، محاسبه انعکاس خطوط دید مستقیم بر روی یک صفحه و گنجاندن آنها در روش سه لایه ناهمزمان ضروری است. این یک کار پیچیده است و برای کارهای آینده باقی مانده است، اگرچه دقت موقعیت یابی کلی هنوز بدون معرفی این اصلاح زیر متر است. در آزمایش 3 به جای آن از ضریب ثابت ساده تری (ضریب کالیبراسیون اتاق) استفاده شد.
در آزمایش 3 هر تأخیر در مقدار ثابت 1.1 (ضریب کالیبراسیون اتاق) ضرب شد که بهبود قابل توجهی در دقت نسبت به آزمایش 2 از 18 سانتی متر به 8 سانتی متر ایجاد کرد. اگرچه استفاده از یک ضریب ثابت ممکن است در برخی موارد منجر به کاهش دقت شود، به نظر می رسد که در مقایسه با سایر عوامل بر دقت نسبتاً کمتری تأثیر می گذارد. به نظر می رسد بزرگترین عامل دریافت سیگنال ضعیف در هنگام جابجایی تلفن به گوشه ها یا کنار دیوارها باشد. معمولاً این اتفاق میافتد اگر میکروفون در فاصلهای دور قرار گرفته باشد و جهتی که به آن اشاره میکند با جهتی که تلفن در آن قرار دارد تفاوت اساسی داشته باشد. راهحلهای ممکن برای این مشکل میتواند استفاده از میکروفونهایی باشد که جهت کمتری دارند یا میکروفونهای بیشتری را در سراسر اتاق اضافه کنید. دریافت در این نواحی شدید نیز تحت تأثیر جهت گیری انحرافی تلفن قرار داشت. این یک عامل غیرمنتظره بود. از نظر تئوری، از آنجایی که بلندگو مستقیماً به سمت بالا است، جهت انحراف نباید تأثیری بر قدرت سیگنال در بدو ورود داشته باشد، مگر اینکه بلندگوی تلفن نیز در ساخت آن تا حدودی جهت دار باشد.
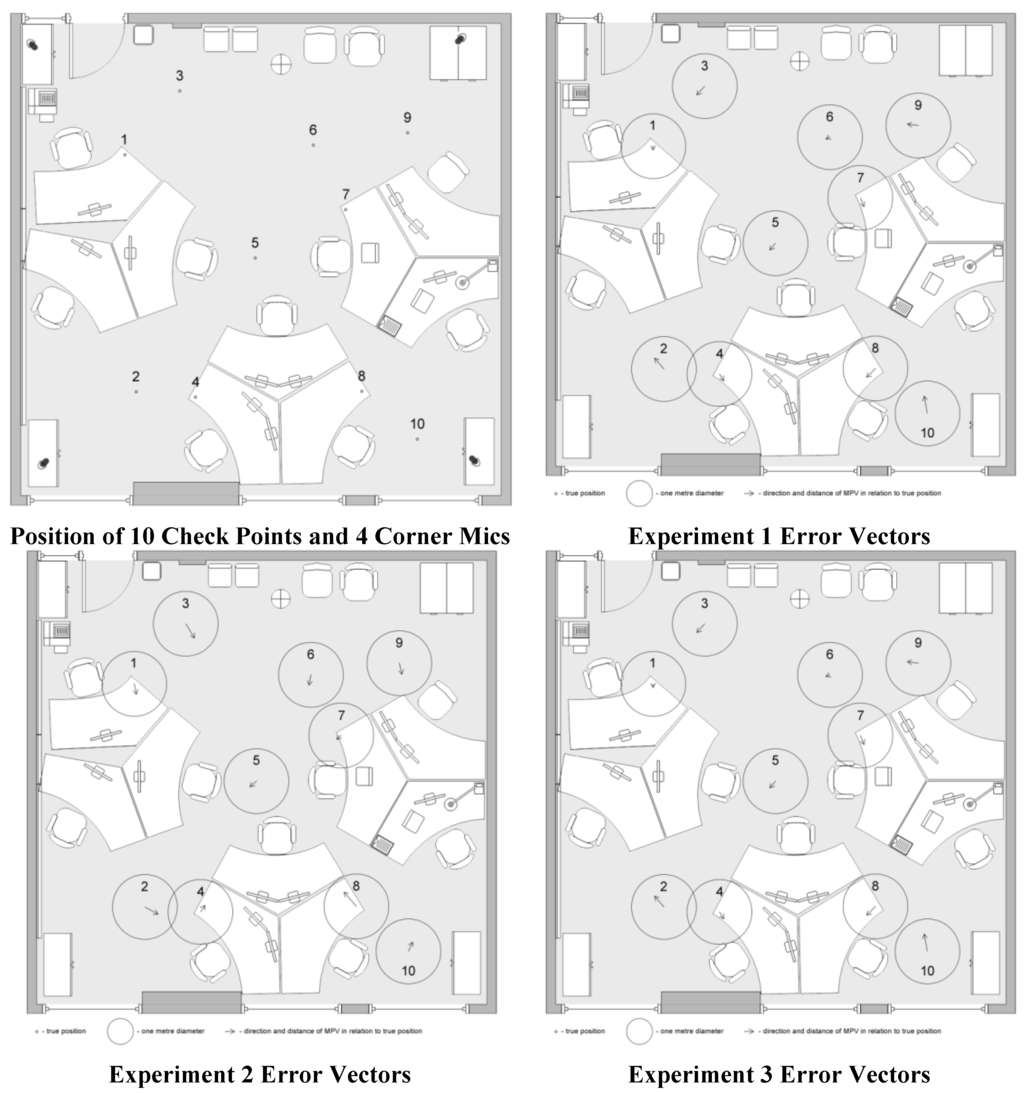
شکل 3. موقعیت 10 مکان آزمایش یا نقاط بررسی (نقطه مرکزی دایره های با قطر 1 متر) و جهت بردار خطا و فاصله از موقعیت واقعی تا MPV برای آزمایش های 1، 2 و 3.
7. تغییر زاویه شیب بلندگو
در بخش قبل تمام آزمایشها با بلندگوی گوشی رو به بالا انجام شد. اگر میکروفون ها درست زیر سقف در هر گوشه اتاق قرار می گیرند، این جهت باید برای به حداکثر رساندن دریافت سیگنال بهینه باشد. از آنجایی که سونوگرافی بسیار جهت دار است، مهم است که زاویه بین جهتی که بلندگو رو به آن قرار دارد و خط دید هر چهار میکروفون به حداقل برسد. با اشاره بلندگو به سمت بالا، این زاویه هرگز از 90 درجه تجاوز نمی کند، که برای این پیاده سازی مهم است زیرا دریافت در چهار میکروفون حداقل مورد نیاز است.
متأسفانه بلندگوی جلوی گوشی (که به عنوان گوشی استفاده می شود) چندان قدرتمند نیست. بلندگوی چند رسانه ای مورد استفاده برای آهنگ های زنگ و سایر صداهایی که قرار است از راه دور شنیده شوند، معمولاً در پشت تلفن قرار می گیرد. با این حال، هنگامی که کاربر با صفحه نمایش لمسی تعامل می کند، معمولاً بلندگو رو به پایین خواهد بود. بنابراین هدف آزمایش بعدی آزمایش این است که سیستم موقعیت یابی تا چه حد با بلندگوی تلفن متمایل به زوایای مختلف به غیر از سمت راست کار می کند.
مگر اینکه بلندگو مستقیماً به سمت بالا یا پایین اشاره کند، مهم است که تلفن همراه علاوه بر شیب (پیچ) چه جهتی انحرافی دارد. عامل دیگر معرفی کاربر در دست گرفتن گوشی است. او ممکن است خط دید مستقیم یکی از چهار میکروفون را مسدود کند یا نکند. از آنجایی که این تنظیم آزمایشی متغیرهای جدید زیادی را معرفی می کند، برخی از آنها باید از معادله خارج می شدند. جهت یاو برای هر مکان به گونه ای انتخاب شد که بلندگو رو به دورترین میکروفون باشد. علاوه بر این، کاربر سعی میکند در صورت امکان، خط دید مستقیم هر یک از میکروفونها را مسدود نکند. این آزمایش برای اندازهگیری تأثیرات تغییر شیب (پیچ) تلفن به تنهایی بر دقت موقعیتیابی و میزان خرابی طراحی شده است.
7.1. روش آزمایش
از این نقطه به بعد، تنها سه بعدی سازی سه بعدی با کالیبراسیون اتاق برای موقعیت یابی استفاده شد. از همان 10 نقطه چک مانند بخش 2 استفاده شد . در هر نقطه چک، کاربر به گونهای میایستاد که جلوی دید مستقیم هیچ یک از میکروفونها را نگیرد. گوشی در پنج جهت شیب مختلف نگه داشته شد: بلندگو به سمت پایین (0 درجه)، در نیمه راه بین افقی و پایین (45 درجه)، بلندگو در جهت افقی (90 درجه)، نیمه راه بین افقی و بالا (135 درجه) و بلندگو به سمت بالا (180 درجه) ( شکل 4 را ببینید). برای هر یک از پنج جهت 10 قرائت انجام شد. برای هر نقطه چک، زاویه انحراف به گونه ای انتخاب شد که بلندگو به سمت دورترین میکروفون جهت بهبود تشخیص سیگنال کلی باشد.
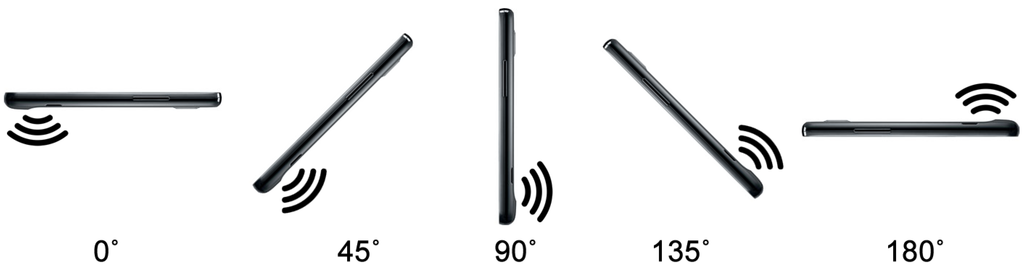
شکل 4. پنج جهت شیب مختلف که در آنها تلفن آزمایش شد. نوارهای صوتی خمیده جهت و جهت بلندگوی اصلی گوشی را در حین چرخش از پایین به بالا نشان می دهند.
7.2. بحث
تمام 10 قرائت جمع آوری شده در پنج زاویه شیب مختلف در هر نقطه چک به عنوان یک نمونه در نظر گرفته شد. برای هر نمونه، بیشترین مقدار محتمل (MPV) محاسبه شد. تفاوت بین MPV و موقعیت واقعی نقطه چک و همچنین انحراف استاندارد آن را می توان در جدول 3 یافت . نرخ های تشخیص سیگنال را می توان در جدول 4 یافت . از میانگین هر 10 نقطه چک، به نظر می رسد که دقت به طور پیوسته با چرخش بلندگو از جهت پایین به بالا افزایش می یابد. با این حال این روند برای هر نقطه به صورت جداگانه صادق نیست ( شکل 5 را ببینید ).
جدول 3. تفاوت بین MPV و موقعیت واقعی ± انحراف استاندارد برای زوایای مختلف شیب. ستون اول شامل شماره نقطه چک است. ستون های 2 تا 6 حاوی خطا و انحراف معیار برای هر زاویه ای است که تلفن در آن نگه داشته شده است. ردیف پایین میانگین تمام 10 نقطه چک را نشان می دهد.
جدول 4. درصد سیگنال های شناسایی شده برای جهت گیری های مختلف بلندگو. ستون اول شامل شماره نقطه چک است. ستون های 2، 3، 4، 5 و 6 حاوی درصد سیگنال های شناسایی شده برای هر زاویه ای است که تلفن در آن نگه داشته شده است.
زوایای 90 درجه (افقی) و 180 درجه (به سمت بالا) تنها زوایای بلندگو هستند که 100٪ تشخیص دارند. با این حال، 90 درجه یک گسترش بسیار زیاد در دقت از برخی از بدترین نتایج تا نتایج همتراز با جهت گیری رو به بالا دارد. به طور جالب توجه، دقت برای زاویه شیب 90 درجه یا بسیار خوب یا بسیار بد است، که اهمیت جهت را هنگام برخورد با امواج صوتی نشان می دهد. بدترین دقت برای 90 درجه در نقطه چک پنج، که تقریباً مرکز اتاق است، ثبت شد. میانگین نتایج برای 180 درجه (بلندگو) 4.5 سانتی متر بدتر از گزارش شده در جدول 2 است .احتمالاً به این دلیل است که یک کاربر واقعی اکنون تلفن را در دست گرفته است – به جای اینکه تلفن را روی سه پایه قرار دهد. نگه داشتن تلفن در دست باعث می شود که قرارگیری دقیق تلفن روی نقطه بازرسی کمتر دقیق باشد و بدن کاربر نیز می تواند در خط دید مستقیم سیگنال تداخل ایجاد کند. دقت برای برخی از نقاط بازرسی در 0 درجه ممکن است گمراه کننده به نظر برسد. به عنوان مثال، نقطه 10، که دورترین نقطه از مرکز اتاق است، به نظر می رسد دقت خوبی (24 سانتی متر) در زاویه شیب 0 درجه دارد، اما نرخ تشخیص برای این نقطه و زاویه تنها 30٪ است. زاویه 45 درجه نسبت به زوایای 0 و 135 درجه سرعت تشخیص بسیار بهتری دارد و در مقایسه با هر جهت دیگر، بیشترین گسترش دقت را دارد. از نقطه نظر عملی، زاویه 135 درجه اهمیت کمی دارد، زیرا کاربر احتمالاً در استفاده معمولی گوشی را در چنین جهت ناخوشایندی نگه نمیدارد.
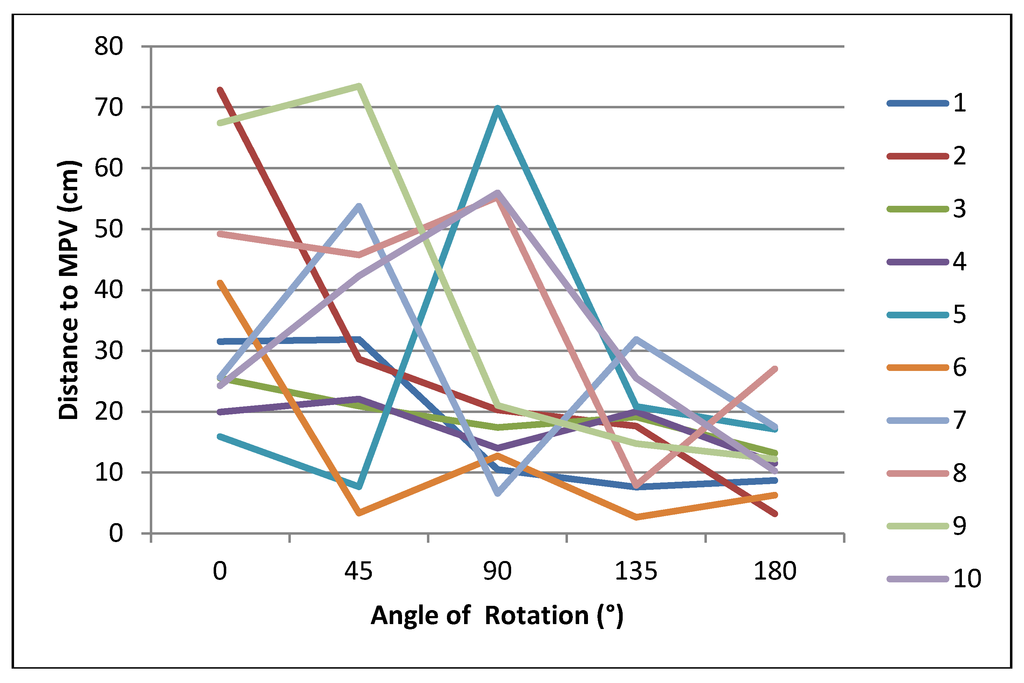
شکل 5. تغییر فاصله (بر حسب سانتی متر) بین MPV و موقعیت صحیح در حالی که بلندگو از جهت پایین به بالا کج می شود. هر رنگ نشان دهنده یک نقطه چک است. محور عمودی فاصله در سانتی متر اندازه گیری می شود. محور افقی زاویه چرخش با 0 درجه به سمت پایین و 180 درجه به سمت بالا است. توجه داشته باشید که چگونه با نزدیک شدن زاویه بلندگو به 180 درجه (به سمت بالا) دقت افزایش می یابد. در همه موارد دقت موقعیت یابی زیر متر باقی می ماند.
از نظر دقت، سرعت تشخیص و قوام، زاویه 180 درجه (به سمت بالا) بلندگو بدون شک قابل اعتمادترین جهت است. این نشان میدهد که مگر اینکه برخی از پارامترهای سیستم مانند افزایش حجم صدا، میکروفنهای جهتدار کمتر یا آستانههای تشخیص سیگنال پایینتر تغییر نکنند، دقیقترین روش این است که به کاربران دستور دهیم بهطور لحظهای گوشی خود را وارونه کنند ( یعنی، صفحه نمایش را در طبقه قرار دهید) و از شتاب سنج های تلفن برای تشخیص این چرخش استفاده کنید تا فرآیند “بیپ” اولتراسونیک را آغاز کنید. اگرچه این ممکن است برای تعامل رابط کاربری ایدهآل نباشد، افزایش دقت موقعیت و قابلیت اطمینان میتواند یک معامله ارزشمند برای افزایش تجربه ناوبری کاربر باشد. با این حال، باید توجه داشت که دقت موقعیت یابی کلی هنوز در تمام جهت گیری های بلندگو زیر متر است.
8. جهت بلندگو و انسداد سیگنال
این بخش دو عامل حذف شده از آزمایش های فوق را برای کاهش تعداد متغیرها بررسی می کند:
-
جهت گیری گوشی: سونوگرافی بسیار جهت دار است و جهت گیری بلندگو نسبت به میکروفون تاثیر بسزایی در کیفیت دریافت دارد. اگر بلندگو مستقیماً به سمت بالا یا پایین باشد، جهت انحراف آن (چرخش حول محور Z) بر کیفیت دریافت در هر یک از چهار میکروفون تأثیر می گذارد. این به نوبه خود می تواند بر کیفیت مهر زمانی رسیدن سیگنال و در نتیجه دقت سه لایه تأثیر بگذارد.
-
کاربر مانع از دید مستقیم بین تلفن و میکروفون:برخلاف صداهای فرکانس پایین که طول موج بلندی دارند، اولتراسوند با صدای فرکانس بالا نفوذ ضعیفی به مانع دارد. این بدان معنی است که برای دستیابی به بهترین دقت، حفظ دید مستقیم بین تلفن و هر چهار میکروفون مهم است. مسدود کردن خط دید مستقیم به یکی از میکروفون ها می تواند بر شدت سیگنال در دریافت تأثیر منفی بگذارد و به دلیل رسیدن سیگنال از طریق پراش، تاخیر ایجاد کند. هم دریافت ضعیف و هم تأخیر می توانند دقت سه لایه را کاهش دهند. محتمل ترین سناریویی که یکی از میکروفون ها مسدود می شود زمانی است که خود کاربر در مسیر سیگنال ایستاده است. اگرچه برای کاهش این مشکل میکروفونهایی روی سقف قرار داده شده بود، اما در برخی موارد هنوز هم میتوان دید مستقیم را مسدود کرد.
8.1. روش آزمایش
تعیین موقعیت در همان آزمایشگاه آزمایشی در بخش قبل انجام شد. با این حال یک مجموعه متفاوت از چهار نقطه چک (P1، P2، P3، P4) این بار استفاده شد. اولین نقطه چک (P1) دقیقاً در مرکز اتاق قرار دارد و هر نقطه چک بعدی در امتداد یک خط مستقیم به یکی از میکروفونهای گوشه در فواصل 1 متری میافتد. در هر یک از چهار نقطه چک، کاربر در هشت مکان مختلف در اطراف نقطه چک ایستاده بود در حالی که تلفن را مستقیماً روی نقطه چک نگه داشته است ( شکل 6)). در موقعیت های B، D، F، H کاربر در خط دید مستقیم بین تلفن و یکی از میکروفون ها قرار می گیرد. به این موقعیت ها “مسدود” می گویند. در موقعیت های A، C، E، G کاربر به گونه ای می ایستد که مسیر هیچ میکروفونی را مسدود نکند. این موقعیت ها به عنوان “مستقیم” نامیده می شوند.

شکل 6. مکان هایی که کاربر در اطراف هر نقطه چک می ایستد. دایره خاکستری در مرکز نشان دهنده نقطه چک است که گوشی هوشمند روی آن نگه داشته شده است. 8 سیلوئت با علامت A-H نمای بالایی از کاربر را نشان می دهد که در همه موارد با پشتش رو به بیرون ایستاده است.
در هر یک از هشت موقعیت، تلفن در سه جهت شیب مختلف قرار داشت: بلندگو رو به بالا (بالا)، رو به کاربر (پشت)، و رو به دور از کاربر (به جلو). در هر جهت 10 بار سیگنال اولتراسوند تولید شد که به عنوان یک نمونه در نظر گرفته شد. در مجموع برای این آزمایش 960 سیگنال ارسال شد که 96 نمونه ساخته شد.
8.2. بحث
F یا هر نمونه MPV محاسبه شد و تفاوت بین MPV و موقعیت واقعی نقطه چک محاسبه شد. نتایج برای هر ایست بازرسی به دو گروه تقسیم شد: مسدود شده (B، D، F، H)، جایی که کاربر در مسیر یکی از میکروفون ها قرار می گیرد و مستقیم (A، C، E، G)، جایی که کاربر در آن قرار دارد. در مسیر هیچ میکروفونی نیست. نتایج را می توان در جدول 5 یافت .
جدول 5. تفاوت بین MPV و موقعیت واقعی ± انحراف استاندارد برای هر نقطه چک، مکان کاربر و جهت گیری. ستون اول ترکیبی از جهت تلفن و مکان کاربر را مشخص می کند. ستون های 2 تا 5 حاوی نتایج برای هر یک از چهار نقطه چک به متر است.
از نظر دقت، جهت گیری بلندگو به سمت بالا نتایج ثابتی را در محدوده 10 تا 20 سانتی متری بدون توجه به جایی که کاربر می ایستد، می دهد، که نشان می دهد در این جهت، مکان کاربر تأثیر کمی بر دقت دارد یا هیچ تأثیری ندارد. با توجه به چهار پیکربندی دیگر، مسدود کردن رو به جلو به طور مداوم در هر چهار نقطه چک بسیار نادرست است، که نتیجه مستقیم ترکیب نامطلوب مکان کاربر و جهت گیری بلندگو است. سونوگرافی بسیار جهت دار است و کمترین انرژی را مستقیماً پشت بلندگو خواهد داشت. در جهت رو به جلو، کاربر مستقیماً پشت بلندگو می ایستد و سیگنال را در این جهت ضعیف تر می کند. در پیکربندیهای بک بلاک، میکروفونی که مستقیماً در جلوی بلندگو قرار دارد مسدود شده است که باعث میشود این دو عامل یکدیگر را خنثی کنند. در نتیجه، بک بلاک شده و دو پیکربندی افقی دیگر که کاربر هیچ میکروفونی را مسدود نمیکند، دقت بسیار مشابهی را برای نقاط چک 1 تا 3 نشان میدهد که بین 20 تا 40 سانتیمتر متغیر است. نتایج برای نقطه چک 4 دقت بدتری را در محدوده 40 سانتی متر تا 1.5 متر نشان می دهد. با این حال، این نتایج کمتر قابل اعتماد هستند، زیرا حدود نیمی از سیگنال ها به هیچ وجه شناسایی نشدند، که منجر به حجم نمونه کوچکتر شد.
تجزیه و تحلیل نرخ شکست تشخیص سیگنال روندهای مشابه را نشان می دهد که اختلاف بین سه نقطه چک اول و آخرین نقطه چک بارزتر است. جهت گیری رو به بالا دارای نرخ شکست 0% در نقاط چک 1-3 است. در نقطه چک 4 2.5 درصد میزان خرابی در پیکربندی مستقیم و 10 درصد نرخ شکست در پیکربندی مسدود شده وجود داشت. از آنجایی که تلفن در نقطه چک 4 از مرکز اتاق دور است، دریافت سیگنال در گوشه مقابل بسیار ضعیف و تقریباً در دو گوشه دیگر ضعیف است.
9. نتیجه گیری
تریلاتراسیون اولتراسوند به عنوان یک رویکرد بسیار امیدوارکننده برای موقعیت یابی موبایل داخلی شناخته شد. سیگنالهایی که با سرعت صوت حرکت میکنند، حتی با سختافزار استاندارد بلندگوی گوشیهای هوشمند، دقت بسیار خوبی، بسیار زیر یک متر ارائه میدهند. بعلاوه، محدوده 20 تا 22 کیلوهرتز معمولاً برای انسان قابل شنیدن نیست، اما می توان آن را توسط بلندگوهای تلفن همراه بازتولید کرد و با میکروفون های ارزان و استاندارد ضبط کرد. از آنجایی که هیچ سخت افزار تخصصی در سمت کلاینت استفاده نمی شود، کاربر فقط باید یک نرم افزار (برنامه) نصب کند تا از سیستم موقعیت یابی Lok8 استفاده کند. ماهیت بسیار جهت دار اولتراسوند، حساسیت به صداهای پس زمینه با فرکانس بالا و نیاز به خط دید بین بلندگو و گیرنده به عنوان بزرگترین موانع برای دقت موقعیت یابی شناخته شد.
یک نمونه اولیه از سیستم موقعیت یابی توسعه داده شد و در یک محیط اداری برای دقت و سایر کاستی های احتمالی آزمایش شد. علیرغم موانع ذکر شده در بالا، میتوان از یک اتاق ۷×۷ متری با چهار میکروفون که مستقیماً در زیر گوشههای سقف قرار گرفته بودند، پوشش موقعیتیابی کامل را دریافت کرد و به درجه قابل اعتمادی از قابلیت اطمینان دست یافت. به طور متوسط این سیستم دقتهایی نزدیک به 10 ± سانتیمتر را تولید میکند که مرتبهای بهتر از روشهای مکانیابی داخلی معاصر است.
سیستم موقعیت یابی داخلی توسعه یافته را می توان از نظر سناریوهای کاربر ارائه شده در بخش 2 ارزیابی کرد. سناریوهای 1 و 2 شامل نشان دادن تلفن به سمت یک شی و انجام پرس و جوی جهت دار است. سناریوهای 2-4 شامل راهنمایی کاربر در اطراف ساختمان است. دقت در سطح سانتی متر به این معنی است که اشیایی به اندازه یک گلدان را می توان به درستی شناسایی و پرس و جو کرد، مشروط بر اینکه جهت گیری تلفن نیز با دقت کافی مشخص شود. علاوه بر این، رفع موقعیت میتواند تقریباً فوراً بدون نیاز به اجرای مداوم سیستم در پسزمینه انجام شود، که برای سناریوهایی مانند جستجوی جهت و برای بهبود عمر باتری ایدهآل است. این واقعیت که تلفن باید برای لحظه ای وارونه شود (به عنوان مثال، بلندگو رو به بالا) برای به دست آوردن بهترین دقت یک نقطه ضعف است. انجام یک تعمیر موقعیت با صفحه رو به بالا ( یعنی بلندگو رو به پایین)، منجر به کاهش دقت موقعیت به 30 تا 40 سانتی متر می شود.
اگرچه موقعیت یابی اولتراسوند، در بیشتر موارد، از داخل کیف یا جیب به خوبی کار نمی کند، اما در هیچ یک از سناریوهای داده شده مشکلی نیست زیرا نیازی به ردیابی مداوم کاربر در پس زمینه نیست. به محض اینکه کاربر گوشی را بیرون آورد و شروع به تعامل با برنامه کرد، موقعیت او بلافاصله محاسبه و توسط برنامه استفاده می شود. توانایی کار در پسزمینه تنها زمانی مهم است که بخواهیم نحوه حرکت افراد در ساختمان را ردیابی و ثبت کنیم، چیزی که جزو اهداف ما نبود.
سیستم موقعیت یابی Lok8 در یک محیط معمولی دفتر/آزمایشگاه دانشگاه آزمایش شد که در آن امکان حفظ خط دید مستقیم برای هر چهار میکروفون وجود داشت. محیطهای زیادی وجود دارد که در آنها عملی است: بیمارستانها، موزهها، سالنهای کنفرانس. در محیطهایی که موانع بلند (مانند قفسههای فروشگاه، پارتیشنهای اتاقک) رایج هستند، هنوز هم میتوان با قرار دادن میکروفونهای بیشتر در فضا، خط دید را حفظ کرد. با توجه به اینکه خرید میکروفون می تواند نسبتاً ارزان باشد، این غیرعملی نیست. هنگامی که خط دید مسدود می شود یا کاربر خارج از فضای دریافت بهینه یکی از میکروفون ها قرار می گیرد، گاهی اوقات مشکلاتی در دقت وجود دارد. این مشکل را میتوان با اضافه کردن میکروفونهای بیشتر یا احتمالاً با استفاده از میکروفونهای همه جهته برطرف کرد. با وجود این محدودیت ها،
منابع
- بوریو، دی. اودریسکول، سی. Fortuny-Guasch، J. اثرات سیگنال شبهدولیت پالسی بر گیرندههای GNSS غیر مشارکتی. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011. صص 1-6.
- هوئن، سی. Willmann, J. TOA چهار طرفه و سه گانه مبتنی بر نرم افزار دستگاه های IEEE 802.11. در مجموعه مقالات نوزدهمین سمپوزیوم بین المللی IEEE در مورد ارتباطات رادیویی شخصی داخلی و سیار، 2008 (PIMRC 2008)، کن، فرانسه، 15 تا 18 سپتامبر 2008. صص 1-6.
- تاپا، ک. Case, S. یک سرویس موقعیت یابی داخلی برای شبکه های Ad Hoc بلوتوث. در مجموعه مقالات MICS، Duluth، MN، ایالات متحده، 11-12 آوریل 2003.
- Mestre، P. سرودیو، سی. کوتینیو، ال. ریگوتو، ال. Matias, J. تکنیک ترکیبی برای اثر انگشت با استفاده از شبکه های بی سیم IEEE802.11. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011.
- فریس، بی. هانل، دی. فرآیندهای فاکس، دی. گاوسی برای تخمین مکان مبتنی بر قدرت سیگنال. در مجموعه مقالات علم و سیستم های رباتیک، فیلادلفیا، PA، ایالات متحده آمریکا، 16-19 اوت 2006.
- مدیو، اس. بنچینی، ال. سیدرونالی، ع. Manes، G. جهت تک لنگر سیستم موقعیت یابی ورود، تقویت استاندارد استاندارد ارتباطات بی سیم. در مجموعه مقالات IPIN 2010، زوریخ، سوئیس، 15-17 سپتامبر 2010. ص 19-20.
- پرز، ام. نوکیا نقشه سه بعدی فوق العاده دقیق و درون در را نشان می دهد . در دسترس آنلاین: www.intomobile.com/2011/11/29/nokia-shows-off-super-accurate-3d-indoor-mapping/ (دسترسی در 17 ژانویه 2012).
- اوتساسون، وی. ورشاوسکی، آ. لامارکا، آ. De Lara، E. محلی سازی دقیق GSM داخلی. در مجموعه مقالات هفتمین کنفرانس بین المللی UbiComp 2005، توکیو، ژاپن، 11-14 سپتامبر 2005. صص 141-158.
- Ball، M. Sensors & Systems، Google شروع قدرتمندی در مرز مکان داخلی دارد. 2012. در دسترس آنلاین: http://www.sensysmag.com/dialog/interviews/28563-google-has-a-strong-start-on-the-indoor-location-frontier.html (در 6 نوامبر 2012 قابل دسترسی است).
- ژو، اس. پولارد، جی. اندازه گیری موقعیت با استفاده از بلوتوث. IEEE Trans. مصرف کنید. الکترون. 2006 ، 52 ، 555-558. [ Google Scholar ] [ CrossRef ]
- پی، ال. چن، آر. لیو، جی. کوسنیمی، اچ. تنهونن، تی. Chen, Y. تعیین موقعیت داخلی بلوتوث مبتنی بر پرسش از طریق توزیعهای احتمالی RSSI. در مجموعه مقالات دومین کنفرانس بین المللی پیشرفت در ارتباطات ماهواره ای و فضایی (SPACOMM 2010)، آتن، یونان، 13 تا 19 ژوئن 2010.
- دوستان، اچ. دای، ز. گرابوفسکی، جی. Neukirchen، H. مدلسازی رومینگ مبتنی بر UML با دستگاههای بلوتوث. در مجموعه مقالات اولین کارگاه Hangzhou-Lübeck در مهندسی نرم افزار 2003، هانگژو، چین، 1-2 نوامبر 2003.
- سبحان، ف. Hasbullah, H. طراحی یک پروتکل رومینگ برای شبکه های بلوتوث. در مجموعه مقالات کنفرانس ملی تحصیلات تکمیلی (NPC) 2009، Universiti Teknologi Petronas، Perak، مالزی، 25-26 مارس 2009.
- پنگ، سی. شن، جی. ژانگ، ی. لی، ی. Tan, K. BeepBeep: یک سیستم محدوده صوتی با دقت بالا با استفاده از دستگاه های موبایل COTS. در مجموعه مقالات پنجمین کنفرانس بین المللی سیستم های حسگر شبکه جاسازی شده (SenSys ’07)، سیدنی، استرالیا، 6-9 نوامبر 2007. صص 1-14.
- بوریلو، جی. لیو، آ. پیشنهاد، T. پالیستانت، سی. شارپ، R. WALRUS: موقعیت مکانی صوتی بی سیم با وضوح در سطح اتاق با استفاده از سونوگرافی. در مجموعه مقالات سومین کنفرانس بین المللی سیستم های تلفن همراه، برنامه ها و خدمات (MobiSys 2005)، سیاتل، WA، ایالات متحده آمریکا، 6-8 ژوئن 2005. ص 191-203.
- فیلوننکو، وی. کالن، سی. Carswell, J. بررسی موقعیت یابی اولتراسونیک در تلفن های همراه. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی (IPIN)، زوریخ، سوئیس، 15-17 سپتامبر 2010.
- هارتر، ا. هاپر، ا. استگلز، پی. وارد، ا. وبستر، پی. آناتومی یک برنامه کاربردی آگاه از زمینه. در مجموعه مقالات پنجمین کنفرانس بینالمللی سالانه ACM/IEEE در محاسبات و شبکهسازی سیار (MobiCom ’99)، سیاتل، WA، ایالات متحده آمریکا، 15-19 اوت 1999. صص 59-68.
- ادلسی، م. کورون، آر. هاجز، اس. نیومن، جی. استگلز، پی. وارد، ا. هاپر، A. پیاده سازی یک سیستم محاسباتی حساس. کامپیوتر 2001 ، 34 ، 50-56. [ Google Scholar ]
- پریانتا، ن. سیستم مکان یابی داخلی کریکت. دکتری پایان نامه، گروه مهندسی برق و علوم کامپیوتر، موسسه فناوری ماساچوست، کمبریج، MA، ایالات متحده آمریکا، 2005. [ Google Scholar ]
- مینامی، م. فوکوجو، ی. هیراساوا، ک. یوکویاما، اس. میزوماچی، م. موریکاوا، اچ. Aoyama, T. DOLPHIN: یک رویکرد عملی برای اجرای یک سیستم موقعیت یابی اولتراسونیک داخلی کاملاً توزیع شده. لکت. توجه داشته باشید. محاسبه کنید. علمی 2004 ، 3205 ، 347-365. [ Google Scholar ]
- هازاس، م. Hopper، A. سیستم های مکان یابی فراصوت باند پهن برای موقعیت یابی بهتر در داخل ساختمان. IEEE Trans. اوباش محاسبه کنید. 2006 . [ Google Scholar ] [ CrossRef ]
- راندل، سی. Muller, H. سیستم موقعیت یابی داخلی کم هزینه. لکت. توجه داشته باشید. محاسبه کنید. علمی 2001 ، 2201 ، 42-48. [ Google Scholar ] [ CrossRef ]
- ویلیامز، بی. کلاین، جی. Reid, I. تغییر مکان SLAM در زمان واقعی. در مجموعه مقالات یازدهمین کنفرانس بین المللی IEEE در بینایی کامپیوتر، 2007 (ICCV 2007)، ریودوژانیرو، برزیل، 14 تا 20 اکتبر 2007. صص 1-8.
- واگنر، دی. Schmalstieg, D. گامهای اولیه به سوی واقعیت افزوده دستی. در مجموعه مقالات هفتمین سمپوزیوم بین المللی IEEE در مورد رایانه های پوشیدنی، White Plains، ایالات متحده، 21-23 اکتبر 2003. صص 127-136.
- سیسیلینو، بی. خطیب، او.اسپرینگر هندبوک رباتیک ; Springer: برلین، آلمان، 2008. [ Google Scholar ]
- Bowditch، N. Dead Reckoning. در ناوبر عملی آمریکایی: مظهر ناوبری . Reprint Services Corp: Temecula، CA، USA، 1995. [ Google Scholar ]
- راندل، سی. جیالیس، سی. مولر، اچ. اندازه گیری موقعیت شخصی با استفاده از محاسبه مرده. در مجموعه مقالات هفتمین سمپوزیوم بین المللی IEEE در مورد رایانه های پوشیدنی، White Plains، نیویورک، ایالات متحده آمریکا، 21-23 اکتبر 2003. صص 166-173.
- گویال، پ. ریبیروی، وی. سرانز، ح. کومارکس، A. سیستم محاسبه مرده عابر پیاده با تسمه پایین. در مجموعه مقالات کنفرانس بین المللی 2011 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، گیماراس، پرتغال، 21 تا 23 سپتامبر 2011. صص 1-7.
- فیلوننکو، وی. کالن، سی. Carswell, J. سه لایه اولتراسونیک ناهمزمان برای موقعیت یابی داخلی تلفن های همراه. لکت. توجه داشته باشید. محاسبه کنید. علمی 2012 ، 7236 ، 33-46. [ Google Scholar ] [ CrossRef ]
- Filonenko، V. سه لایه اولتراسونیک ناهمزمان برای موقعیت یابی داخلی تلفن های همراه. دکتری پایان نامه، موسسه فناوری دوبلین، دوبلین، ایرلند، 2012. [ Google Scholar ]
- Paarmann, L. طراحی و تجزیه و تحلیل فیلترهای آنالوگ: دیدگاه پردازش سیگنال . Springer: برلین، آلمان، 2001. [ Google Scholar ]
© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر