

خلاصه
داده های شناور خودرو (FCD) ثبت شده با سیستم موقعیت یابی جهانی (GPS) یک منبع داده مهم برای تحقیقات ترافیک است. با این حال، FCD در معرض خطا هستند، که میتواند به دقت ضبطها (خطای اندازهگیری) یا به نرخ زمانی نمونهگیری دادهها (خطای درونیابی) مربوط باشد. هر دو خطا بر پارامترهای حرکت مشتق شده از FCD، مانند سرعت یا جهت، تأثیر میگذارند و در نتیجه بر نتایج حاصل از حرکت تأثیر میگذارند. در این مقاله، یافتههای اخیر در مورد همبستگی خودکار خطای اندازهگیری GPS و یافتههای به خوبی تثبیت شده از تئوری پیادهروی تصادفی را برای تجزیه و تحلیل مجموعهای از FCD در دنیای واقعی ترکیب کردیم. اول، ما نشان دادیم که خطای اندازهگیری در FCD تحتتاثیر همبستگی مثبت قرار گرفت. توضیح دادیم که چرا این معیار کیفیت داده ها است. دومین، ما چهار معیار را برای ارزیابی تأثیر خطای درون یابی ارزیابی کردیم. ما دریافتیم که خطای درون یابی به شدت بر تفسیر صحیح دینامیک خودرو (سرعت، جهت) تأثیر می گذارد، در حالی که تأثیر آن بر مسیر (مسافت طی شده، مکان مکانی) متوسط بود. بر اساس این نتایج، توصیه هایی برای ضبط FCD با استفاده از GPS ارائه کردیم. توصیههای ما فقط مربوط به نمونهگیری مبتنی بر زمان است، نمونهگیری مبتنی بر تغییر، مکانمحور یا مبتنی بر رویداد مورد بحث قرار نمیگیرد. رویکرد نمونه گیری اثرات خطا بر پارامترهای حرکت را به حداقل می رساند و در عین حال از جمع آوری اطلاعات اضافی اجتناب می کند. این برای به دست آوردن نتایج قابل اعتماد از FCD بسیار مهم است. جهت)، در حالی که تاثیر آن بر مسیر (مسافت طی شده، موقعیت مکانی) متوسط بود. بر اساس این نتایج، توصیه هایی برای ضبط FCD با استفاده از GPS ارائه کردیم. توصیههای ما فقط مربوط به نمونهگیری مبتنی بر زمان است، نمونهگیری مبتنی بر تغییر، مکانمحور یا مبتنی بر رویداد مورد بحث قرار نمیگیرد. رویکرد نمونه گیری اثرات خطا بر پارامترهای حرکت را به حداقل می رساند و در عین حال از جمع آوری اطلاعات اضافی اجتناب می کند. این برای به دست آوردن نتایج قابل اعتماد از FCD بسیار مهم است. جهت)، در حالی که تاثیر آن بر مسیر (مسافت طی شده، موقعیت مکانی) متوسط بود. بر اساس این نتایج، توصیه هایی برای ضبط FCD با استفاده از GPS ارائه کردیم. توصیههای ما فقط مربوط به نمونهگیری مبتنی بر زمان است، نمونهگیری مبتنی بر تغییر، مکانمحور یا مبتنی بر رویداد مورد بحث قرار نمیگیرد. رویکرد نمونه گیری اثرات خطا بر پارامترهای حرکت را به حداقل می رساند و در عین حال از جمع آوری اطلاعات اضافی اجتناب می کند. این برای به دست آوردن نتایج قابل اعتماد از FCD بسیار مهم است. رویکرد نمونه گیری اثرات خطا بر پارامترهای حرکت را به حداقل می رساند و در عین حال از جمع آوری اطلاعات اضافی اجتناب می کند. این برای به دست آوردن نتایج قابل اعتماد از FCD بسیار مهم است. رویکرد نمونه گیری اثرات خطا بر پارامترهای حرکت را به حداقل می رساند و در عین حال از جمع آوری اطلاعات اضافی اجتناب می کند. این برای به دست آوردن نتایج قابل اعتماد از FCD بسیار مهم است.
کلید واژه ها:
ردیابی GPS ; خطای اندازه گیری GPS ; خطای درونیابی ; فاصله زمانی نمونه گیری ; تجزیه و تحلیل حرکت، گسسته سازی مجدد
1. معرفی
داده های شناور خودرو (FCD) به طور گسترده ای برای تجزیه و تحلیل پدیده های ترافیکی استفاده می شود. اتومبیل های شناور وسایل نقلیه مجهز به دستگاه های موقعیت یابی هستند. معمولاً اینها دستگاه های GPS (سیستم موقعیت یاب جهانی) هستند که حرکت اتومبیل ها و مکان آنها را در مکان و زمان ثبت می کنند. FCD یک منبع داده مهم در تحقیقات ترافیک است. FCD امکان محاسبه زمان سفر وابسته به زمان را در امتداد راهروهای شهری [ 1 ]، آشکارسازی تراکم ترافیک [ 2 ] و آشکارسازی پیچیدگی تحرک انسان [ 3 ] را امکان پذیر می کند. آنها به شناسایی نقص در برنامه ریزی ترافیک شهری [ 4 ] و استنتاج وضعیت های ترافیکی [ 5 ] کمک می کنند. FCD برای به دست آوردن اطلاعات ترافیک در زمان واقعی از پویایی خودروهای تک استفاده می شود [ 6]. علاوه بر این، FCD یک منبع داده مهم برای مسیریابی محیطی [ 7 ] است و به شناسایی نقاط داغ انتشار در شهرها کمک می کند [ 8 ].
FCD جمع آوری شده توسط GPS معمولاً به عنوان یک مسیر ذخیره می شود. خط سیر دنباله ای از تاپل ها است < (پ1،تی1) ، . . . ، (پn،تیn) ><(�1,�1)،...،(پ�،تی�)>، با تی1< . . . <تیnتی1<...<تی�. یک تاپل (پمن،تیمن)(پمن،تیمن)از برآورد موقعیت تشکیل شده است پمنپمنو یک مهر زمان تیمنتیمنو بنابراین، به عنوان یک موقعیت مکانی-زمانی نامیده می شود. حرکت میانی بین موقعیت های مکانی-زمانی متوالی درون یابی می شود. به دلایل سادگی، درون یابی خطی بیشتر استفاده می شود [ 9 ].
مسیر GPS یک نمایش گسسته از حرکت مداوم یک ماشین شناور است که با یک سیستم اندازه گیری ثبت شده است. از این رو به ناچار تحت تأثیر دو نوع خطا قرار می گیرد: خطای اندازه گیری و خطای درون یابی [ 10 ].
-
خطای اندازه گیری ویژگی سیستم اندازه گیری است که برای ثبت حرکت استفاده می شود. برای FCD، خطای اندازه گیری به تفاوت بین موقعیت مکانی واقعی خودروی شناور در یک زمان خاص و تخمین موقعیت GPS در همان زمان اشاره دارد.
-
خطای درون یابی یکی از ویژگی های گسسته حرکت است. برای FCD، خطای درون یابی از تفاوت بین حرکت مداوم خودروی شناور و عکس های فوری گسسته در مسیر ناشی می شود. از این رو، خطای درون یابی ارتباط نزدیکی با نرخ نمونه برداری زمانی دارد که در آن داده ها جمع آوری می شوند.
اندازه گیری و خطای درون یابی بر محاسبه پارامترهای حرکت تأثیر می گذارد و در نتیجه بر نتایج به دست آمده از FCD تأثیر می گذارد. پارامتر حرکت یک کمیت فیزیکی حرکت [ 11 ] است، مانند سرعت یا جهت. با کمال تعجب، تأثیر خطا بر پارامترهای حرکت تنها در مطالعات فوق الذکر در مورد FCD و سایر مقالات منتشر شده به طور خلاصه مورد بررسی قرار گرفته است. نقش نرخ نمونهگیری، برای مثال، برای تخمین زمان سفر [ 12 ] و برآورد وضعیت ترافیک [ 13] مورد بحث قرار گرفته است.] از FCD. هر دو مطالعه بر اندازهگیریهای سرعت نقطهای ناوگان تکیه دارند، که به عنوان شاخصی برای وضعیت ترافیک جمعی در یک شبکه جاده ای عمل میکنند. نویسندگان ارزیابی کردند که در کدام فرکانس زمانی اینها را جمع آوری کنند.
در این مقاله به جای رفتار جمعی خودروها در ترافیک، بر حرکت خودروهای فردی تمرکز می کنیم. ما ادعا میکنیم که یک استراتژی نمونهگیری زمانی مناسب برای جمعآوری FCD فردی با یک GPS هم در ادبیات منتشر شده ضروری است و هم گم شده است. ما معتقدیم که یک استراتژی نمونه گیری زمانی باید جنبه های زیر را در نظر بگیرد:
-
نمونه برداری باید هدف تحلیل حرکت را منعکس کند. کدام اطلاعات برای تجزیه و تحلیل و در کدام سطح از جزئیات مورد نیاز است؟
-
نمونه برداری باید به ویژگی های سیستم اندازه گیری بپردازد. خطای اندازه گیری GPS هنگام جمع آوری FCD چه تأثیری دارد؟
-
نمونه برداری باید به ویژگی های جسم متحرک تحت مشاهده پاسخ دهد. خطای درون یابی نفوذ هنگام جمع آوری FCD چیست؟
در این مقاله ما عمدتاً بر دو جنبه اخیر تمرکز می کنیم. ابتدا، ما ارزیابی می کنیم که چگونه خطای اندازه گیری و درون یابی بر روی FCD دنیای واقعی بر اساس چهار پارامتر حرکتی تأثیر می گذارد. اینها مسیر فضایی، مسافت، سرعت و جهت خودروی شناور هستند. سپس بر روی نتایج تجربی خود میسازیم و توصیههای نمونهگیری موقتی برای ضبط FCD با GPS ارائه میکنیم. هدف توصیههای ما به حداقل رساندن تأثیر خطا در عین اجتناب از ثبت اطلاعات اضافی است. ما معتقدیم که توصیههای ما میتواند به محققان کمک کند تا فاصله زمانی مناسبی برای ضبط FCD با GPS پیدا کنند.
بخش 2 کار مرتبط از ادبیات منتشر شده قبلی را معرفی می کند. بخش 3 داده های تجربی را توصیف می کند و چهار پارامتر حرکتی را که اثر خطا برای آنها بررسی می شود، تعریف می کند. بخش 4 تأثیر خطای اندازه گیری را تجزیه و تحلیل می کند، بخش 5 تأثیر خطای درون یابی بر FCD را تجزیه و تحلیل می کند. بخش 6 توصیه هایی برای ضبط FCD می دهد، بخش 7 نتایج ما را مورد بحث قرار می دهد.
2. کارهای مرتبط
در این بخش ابتدا کار مربوط به اندازه گیری و خطای درون یابی در داده های حرکت را معرفی می کنیم (1). سپس رویکردهای فیلترینگ و هموارسازی موجود را نشان میدهیم که هدف آنها حذف اثرات خطا است و شبیهسازی حرکت را مورد بحث قرار میدهیم (2). در نهایت، توضیح میدهیم که چگونه میتوان از ایدههای مطرح شده در شبیهسازی حرکت برای ارزیابی تأثیر خطای درونیابی در FCD استفاده کرد (3).
(1) هر دو خطای درون یابی و خطای اندازه گیری بر اطلاعات بازیابی شده از داده های مسیر GPS تأثیر می گذارند. نرخ نمونه برداری زمانی تأثیر اساسی بر روی، به عنوان مثال، محاسبات سرعت و سرفصل در حرکات عابر پیاده [ 14 ] و مسافت طی شده توسط کشتی های ماهیگیری [ 15 ] دارد: خطاهای اندازه گیری منجر به تخمین بیش از حد مسافت طی شده در زمانی که نرخ نمونه برداری بالا است، می شود. ، در حالی که خطاهای درون یابی منجر به دست کم گرفتن مسافت طی شده در زمانی که نرخ نمونه برداری کم است [ 15 ].
دقت تخمین موقعیت GPS و تأثیر خطای اندازه گیری به طور گسترده در ادبیات منتشر شده مورد بحث قرار گرفته است، به عنوان مثال در [ 16 ]. عملکرد فعلی GPS و دقت آن در گزارش تحلیل عملکرد سه ماهه سیستم موقعیت یابی جهانی (GPS) خدمات موقعیت یابی استاندارد (SPS) در دسترس عموم قرار گرفته است [ 17 ]. نشان داده شده است که دقت GPS در طول زمان متفاوت است [ 18 ]، با مکان [ 19 ] و دستگاه [ 20]]. با این حال، تخمین موقعیت GPS در یک مسیر معمولاً از نظر مکان و زمان نزدیک است، که بر دقت پارامترهای حرکت تأثیر می گذارد. خطای اندازه گیری GPS به دنبال همبستگی خودکار مکانی و زمانی [ 21 ، 22 ، 23 ] و باعث تخمین بیش از حد سیستماتیک فاصله [ 24 ] شده است.
مشکل خطای درون یابی در نمایش حرکت قبلاً در جغرافیای دوران اولیه شناخته شده بود . [ 25 ]. هاگرستراند خاطرنشان کرد که آگاهی از موقعیت یک جسم متحرک در فضا به طور غیرقابل برگشتی با زمان مرتبط است: هر چه زمان بین دو موقعیت شناخته شده یک جسم بیشتر باشد، مکان آن بین اینها کمتر است. مفهوم هاگرستراند از بیضی های خطا بعدها برای نشان دادن موقعیت احتمالی وابسته به زمان یک شی در فضای دو بعدی نامحدود استفاده شد [ 26 ]. این رویکرد متعاقباً به اجسام متحرک در یک محیط محدود، مانند اتومبیلها در یک شبکه جادهای گسترش یافت [ 27 ، 28 ].
(2) در علم ناوبری و اطلاعات جغرافیایی، از فیلتر کردن و صاف کردن برای کاهش تأثیر خطاها در مسیر حرکت استفاده شده است. این شامل هموارسازی حداقل مربعات، هموارسازی مبتنی بر هسته و فیلتر کالمن است [ 29 ]. برخی از روش های هموارسازی پارامترهای حرکت را بهتر از بقیه حفظ می کنند. برای مثال، برای خودروهای شناور مشخص شد که فیلتر کالمن کمترین تفاوت را بین مسافت پیموده شده، سرعت و شتاب ثبتشده با GPS و مواردی که از گذرگاه شبکه کنترلکننده ماشین (CAN) به دست میآیند، دارد [ 30 ] .
در زمینه اکولوژی حرکت، مدلهای آماری یا خطاهای موجود در مسیرهای حرکت ثبتشده را در نظر میگیرند یا فرآیندهای حرکت را به روش محاسباتی محاسباتی شبیهسازی میکنند. ما به طور خلاصه به سه رویکرد مورد استفاده خواهیم پرداخت: مدلهای فضای حالت (SSM)، مدلهای حرکت پل براونی (BBMMs) و مدلهای پیادهروی تصادفی (RW).
مدلهای فضای حالت اجازه میدهند تا حرکت واقعی اما مشاهدهنشده یک شی را به مشاهده این حرکت پیوند دهیم [ 31 ]. حرکت واقعی با استفاده از یک مدل فرآیند توصیف میشود، که مدلی از پویایی حرکت است، در حالی که مشاهدات از اندازهگیریها، مانند موقعیتهای یک دستگاه ردیابی GPS ناشی میشوند و عموماً تحت تأثیر خطاها قرار میگیرند. مدلهای فرآیند را میتوان با پارامترهای مختلفی کنترل کرد، بهعنوان مثال، به رفتار یک حیوان تحت مشاهده، که اجازه میدهد انواع مختلف حرکت توصیف شود [ 32 ]. یک مثال برای SSM فیلتر کالمن است.
مدل های حرکت پل براونی (BBMMs) برای بازسازی حرکت بین موقعیت های ثبت شده استفاده می شود. بر خلاف درونیابی خطی ساده، BBMMها یک حرکت تصادفی [ 33 ] یا یک حرکت تصادفی مغرضانه [ 34 ] بین دو موقعیت ثبت شده را فرض می کنند. از آنجایی که BBMM ها احتمال اشغال یک شی متحرک در طول حرکت خود را توصیف می کنند، اغلب برای تخمین استفاده از فضای حیوانات استفاده می شوند [ 34 ]. با این حال، آنها همچنین می توانند الگوهای حرکتی، مانند برخورد دو جسم را توصیف کنند [ 33 ].
مدل های پیاده روی تصادفی (RW) به طور گسترده ای برای شبیه سازی حرکت اجسام، عمدتا حیوانات استفاده می شود. در سادهترین شکل، مدل RW یک فرآیند گامبهگام متوالی است که در آن یک شی در یک جهت تصادفی در هر مرحله حرکت میکند. سایر نسخههای واقعیتر این مدلها یک سوگیری را در قالب تمایل به ترجیح یک جهت خاص، یا یک همبستگی در قالب تمایل به ادامه حرکت در همان جهت معرفی میکنند [35 ] . علاوه بر این، یک شاخص سینوسیتی فضایی محض می تواند “درجه سیم پیچی” حرکت را در مدل RW کنترل کند [ 36 ، 37]. یک نمای کلی ساختار یافته از تئوری ریاضی پشت انواع مختلف مدلهای RW (با سوگیری و غیر مغرضانه، همبسته و غیرهمبسته)، و همچنین سناریوها و محدودیتهای کاربردی ممکن را میتوان در [35] یافت . مدلهای RW یک پایه نظری صریح برای مشاهدات مرتبط با حرکت ارائه میکنند و به یافتههای موجود در دادههای دنیای واقعی مربوط میشوند [ 38 ]. در پاراگراف زیر نشان می دهیم که چگونه از این رابطه استفاده می کنیم.
(3) در نظریه RW، گسسته سازی مجدد زمانی برای ارزیابی اثرات نرخ نمونه بر روی آمار به دست آمده از پیاده روی تصادفی استفاده می شود. تفکیک مجدد یک RW تأثیر قابل توجهی در محاسبه پارامترهای حرکت دارد [ 39 ، 40 ]. هنگامی که نرخ نمونه برداری کاهش می یابد، افزایش خطای درون یابی منجر به کاهش سرعت مشاهده شده می شود، به نظر می رسد جسم کندتر حرکت می کند.
در این کار، مفهوم تفکیک مجدد زمانی را برای FCD دنیای واقعی اعمال کردیم. ابتدا، مطمئن شدیم که تأثیر خطای اندازهگیری زیر یک آستانه معین و قابل تحمل است. سپس چهار پارامتر حرکتی تعریف کردیم و این پارامترها را برای کاهش فرکانسهای نمونهبرداری محاسبه کردیم. با مقایسه تفاوت بین پارامترهای حرکت، اثرات خطای درون یابی بر FCD را ارزیابی کردیم.
3. FCD و پارامترهای حرکت
در این بخش FCD تجربی مورد استفاده برای تجزیه و تحلیل را معرفی می کنیم. سپس پارامترهای حرکت را تعریف می کنیم و نشان می دهیم که چگونه از FCD مشتق شده اند.
3.1. مجموعه داده های تجربی
برای جمع آوری FCD، ماشینی را به گیرنده GPS (AMV On-Board Einheit ASG؛ برای جزئیات، نگاه کنید به: http://www.amv-networks.com/amv_r_system/amv_r__on-board_einheit_asg_r_ ) مجهز کردیم و حرکت آن را حدود 60 ردیابی کردیم. روزها. این خودرو در داخل و اطراف شهر سالزبورگ، اتریش، در یک شبکه جاده ای عمدتا شهری که شامل خیابان های درون شهری، جاده های برون شهری و بزرگراه ها بود، حرکت کرد. بنابراین FCD طیف وسیعی از سرعت ها را پوشش می دهد (حداقل: 0کیلومتر در ساعت0کیلومتر/ساعت، بیشترین: 140کیلومتر در ساعت140کیلومتر/ساعت، میانگین: 50کیلومتر در ساعت50کیلومتر/ساعت). داده ها با نرخ نمونه گیری زمانی ثبت شد 1هرتز1هرتز.
ابتدا داده ها را از قبل پردازش و پاکسازی کردیم. ما تمام قسمت هایی را که حرکتی از نظر فیزیکی غیرممکن یا غیر قانونی را پیشنهاد می کردند، یعنی حرکت با سرعت بالاتر را حذف کردیم.140کیلومتر در ساعت140کیلومتر/ساعتیا شتاب بالا 5متر /س25متر/س2. اگرچه جی پی اس بیشتر حرکت رو به جلو خودرو را در جاده باز ثبت می کرد، اما برخی از داده ها در زمانی که خودرو ساکن بود، در حال معکوس بود یا در یک تونل قرار داشت نیز جمع آوری شد. ما این فازها را با یک الگوریتم تشخیص حالت ساده حذف کردیم. این الگوریتم سرعت و شتاب خودرو را تجزیه و تحلیل میکند و فازهایی را که خودرو در آن رانندگی میکرد از فازهایی که خودرو در آن رانندگی نمیکرد، متمایز میکند [ 41 ]. پس از پیش پردازش، داده ها در حدود 570کیلومتر570کیلومتراز حرکت پیوسته رو به جلو، نمونه برداری با نرخ نمونه گیری ثابت 1هرتز1هرتز.
3.2. تعریف پارامترهای حرکت
حرکت واقعی یک ماشین یک فرآیند پیوسته است، در حالی که FCD شامل اندازه گیری هایی است که با GPS در نقاط گسسته از زمان ثبت می شود. حرکت بین اینها درون یابی است. در نتیجه، یک پارامتر حرکت واقعی وضعیت فیزیکی واقعی خودروی شناور را منعکس میکند، در حالی که یک پارامتر حرکت اندازهگیری شده از تخمینهای موقعیت GPS متوالی در طول مسیر به دست میآید و تحتتاثیر اندازهگیری و خطای درونیابی قرار میگیرد. میز 1چهار پارامتر حرکت (مسیر فضایی، مسافت، سرعت و جهت) را معرفی می کند و یک تعریف رسمی ارائه می دهد. برای همه ملاحظات زیر فرض می کنیم که ماشین شناور در فضای اقلیدسی دوبعدی حرکت می کند، که مسیر به صورت خطی درون یابی شده و فاصله نمونه گیری ثابت است. علاوه بر این، ما فقط به موقعیت مکانی مسیر نیاز داریم پمنپمنتحت تأثیر خطا قرار می گیرد، در حالی که مهر زمان تیمنتیمنبدون خطا است این برای داده های حرکت نمونه برداری شده در فرکانس های بالا معقول است [ 22 ، 42 ].
پارامترهای حرکت فهرست شده در جدول 1 جامع نیستند (به عنوان مثال، [ 11 ] را ببینید)، اما بسیاری از پارامترهای دیگر را می توان به راحتی از آنها استخراج کرد. به عنوان مثال، شتاب، تغییر سرعت در طول زمان است. زاویه چرخش تغییر جهت در طول زمان است. توجه داشته باشید که در عمل، سرعت اغلب مستقیماً از اندازه گیری های سرعت نقطه ای بازیابی می شود. سرعت نقطه بخشی از تخمین موقعیت GPS است و معمولاً کمی تحت تأثیر خطای اندازه گیری قرار می گیرد [ 43 ]. با این حال، ما نمی دانستیم که سرعت نقطه در گیرنده GPS مورد استفاده چگونه محاسبه می شود. بنابراین، سرعت را از دو تخمین موقعیت متوالی به دست آوردیم. این سرعت متوسط برای تشخیص نقاط پرت و تطبیق نقشه مهم است [ 44 ].

جدول 1. پارامترهای حرکت و تعاریف آنها.
به دلایل واضح، نمی توان حرکت واقعی یک خودرو را با هیچ سیستم اندازه گیری ثبت کرد. متأسفانه، تمام آزمایشات بعدی نیاز به ارجاعی دارند که حرکت ثبت شده با GPS را بتوان با آن مقایسه کرد. از این رو، ما یک پارامتر مرجع را به عنوان تقریبی از پارامتر حرکت واقعی تعریف میکنیم که به طور ایدهآل تحت تأثیر خطای نسبتاً کمی قرار میگیرد یا با یک سیستم اندازهگیری متفاوت محاسبه میشود. مثلاً فاصله مرجع را محاسبه کردیم د0د0با ثبت چرخش محور محرک خودرو، مشابه [ 30 ]. همه پارامترهای مرجع را با زیرنویس مشخص می کنیم 00.
4. ارزیابی تأثیر خطای اندازه گیری
در این بخش، تأثیر خطای اندازهگیری بر روی FCD تجربی را از بخش 3.1 تحلیل میکنیم . ما رویکرد را در [ 24]، که امکان محاسبه همبستگی خودکار خطای اندازه گیری GPS در داده های حرکتی را بدون استفاده از حقیقت موقعیتی زمین فراهم می کند. نویسندگان نشان میدهند که خطای اندازهگیری GPS باعث یک سوگیری سیستماتیک در دادههای حرکتی میشود. مسافت های ثبت شده با GPS – به طور متوسط - بزرگتر از مسافت های واقعی است که توسط یک جسم متحرک طی می شود، اگر خطای درون یابی نادیده گرفته شود. این سوگیری سیستماتیک از نظر عملکردی با همبستگی خودکار خطای اندازهگیری GPS مرتبط است. اگر خطای اندازه گیری شدیداً همبسته خودکار باشد، سوگیری سیستماتیک باید کم باشد. این بدان معنی است که مسافت های ثبت شده با GPS فقط کمی بیشتر از مسافت های واقعی طی شده توسط خودروی شناور است. این رابطه در معادله زیر [ 24 ] خلاصه می شود:
سی=د20– E (د2متر) +V a rg p s�=�02−�(��2)+Varجی پی اس
در معادله ( 1 ) C ، همبستگی خودکار غیر عادی خطای اندازه گیری GPS است. د20�02فاصله مرجع مجذور (یا فاصله واقعی) و E (د2متر)�(��2)فاصله مربع مورد انتظار ناشی از خطای اندازه گیری است. علاوه بر این، V a rg p sVarجی پی اسواریانس ترکیبی خطای اندازه گیری GPS در هر دو تخمین موقعیت است که فاصله بین آنها محاسبه شده است. به دلایل سادگی، فرض می شود که خطای اندازه گیری GPS از توزیع یکسانی در هر دو تخمین موقعیت تبعیت می کند. این واقع بینانه است زیرا اینها در فضا نزدیک هستند. از این رو V a rg p sVarجی پی اسبه عنوان … تعریف شده است V a rg p s= 2σ2ایکس+ 2σ2yVarجی پی اس=2�ایکس2+2��2، جایی که σایکس�ایکسو σy��خطای اندازه گیری GPS در جهت x و y هستند. جایگزین می کنیم E (د2متر)�(دمتر2)با د2متر¯دمتر2¯، میانگین مشاهده شده از تمام اندازه گیری های فاصله و نرمال شدن توسط V a rg p sVarجی پی اس. این بازده سی^سی^، برآوردی برای همبستگی خودکار نرمال شده خطای اندازه گیری GPS.
سی^=د20–د2متر¯+V a rg p sV a rg p sسی^=د02–دمتر2¯+Varجی پی اسVarجی پی اس
ما معادله ( 1 ) را به FCD تجربی شرح داده شده در بخش 3.1 اعمال کردیم . مشابه [ 30 ]، فاصله مرجع د0د0از اتوبوس شبکه کنترل کننده ماشین (CAN) بازیابی شد، جایی که یک سنسور چرخش محور محرک ماشین را ثبت کرد. تنظیم کردیم σایکس=σy= 3متر�ایکس=��=3متر. این مقدار با توجه به تجربه ما با دستگاه GPS در محیط ضبط انتخاب شد. نتایج معادله (2) بیانگر موارد زیر است: اگر خطای اندازه گیری در داده ها دارای واریانسی از V a rg p sVarجی پی اسو اگر تحت تأثیر خودهمبستگی قرار نگیرد، پس سی^سی^دقیقا صفر است اگر سی^سی^مثبت است باید در داده ها همبستگی خودکار وجود داشته باشد.
ما آن را پیدا کردیم دمتر¯دمتر¯همیشه از فاصله مرجع فراتر رفته است د0د0مشتق شده از گذرگاه CAN، به طوری که میانگین از دمتر–د0دمتر–د0در اطراف برابر شد 0 . 7متر0.7m. از این رو، داده ها تأیید می کنند که GPS فاصله ها را بیش از حد برآورد می کند و امکان محاسبه را فراهم می کند سی^�^. شکل 1 مقدار را نشان می دهد سی^�^برای فواصل مرجع مختلف د0�0که در 1متر1mسطل زباله سی^�^همیشه مثبت است خطای اندازه گیری در FCD تجربی تحت تأثیر خودهمبستگی مثبت قرار می گیرد. این بدان معنی است که تخمین های موقعیت متوالی خطای بسیار مشابهی دارند. گسترش این خطا به طور قابل توجهی کمتر از آن چیزی است که توسط پیشنهاد شده است V a rg p sVargps. خودهمبستگی در شکل 1 با افزایش فاصله مرجع کاهش می یابد د0�0. این نشان میدهد که خطای اندازهگیری در دادهها از نظر مکانی همبستگی خودکار دارد. توجه داشته باشید که معادله ( 1 ) تخمینی از همبستگی خودکار خطای اندازه گیری GPS را با توجه به V a rg p sVargps. اگر مقادیر کوچکتری را برای آن انتخاب کرده بودیم σایکس��و σy��، مثلا σایکس=σy= 2متر��=��=2mخود همبستگی تخمین زده شده در شکل 1 نیز کوچکتر خواهد بود. با این حال، سی^سی^همچنان مثبت خواهد بود و همچنان همان روند کاهشی را دنبال خواهد کرد. این به این معنی است که ما هنوز می توانیم نتیجه بگیریم که همبستگی زمانی و مکانی در داده ها وجود دارد.
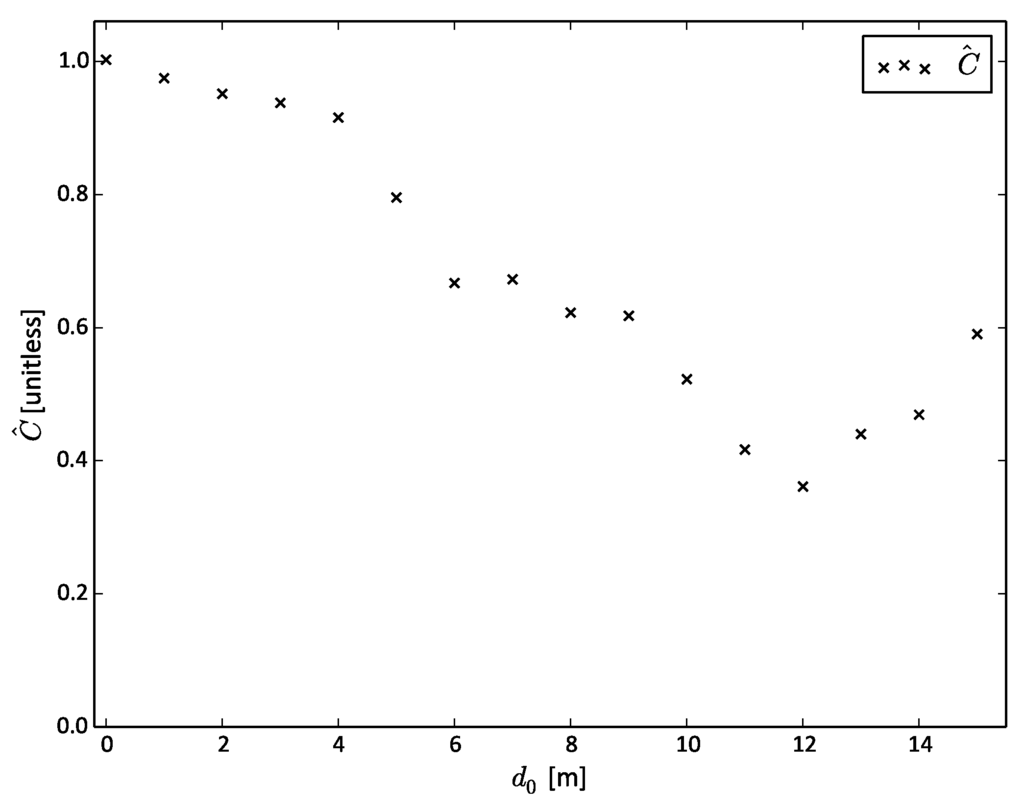
شکل 1. همبستگی خودکار خطای اندازه گیری GPS در FCD تجربی. همبستگی ( سی^سی^) با فاصله مرجع کاهش می یابد ( د0د0) افزایش. د0د0فاصله بین ثبت دو تخمین موقعیت متوالی با توجه به گذرگاه CAN خودرو است.
نتایج در شکل 1 با یافته های تجربی از ادبیات منتشر شده مطابقت دارد. خطای اندازه گیری GPS تحت تأثیر همبستگی خودکار مکانی و زمانی قرار می گیرد [ 21 ، 22 ، 23 ]. این خودهمبستگی را می توان به عنوان یک معیار کیفیت برای داده های حرکتی [ 24 ] تفسیر کرد. اگرچه خطای اندازه گیری در FCD وجود دارد، اما این خطا برای تخمین های موقعیت متوالی مشابه است. اگر پارامترهای حرکتی مانند مسافت، جهت یا سرعت از این موارد محاسبه شوند، خطا تمایل به خنثی شدن دارد. بنابراین، ما ادعا می کنیم که درمان FCD نمونه برداری شده در آن مشروع است 1هرتز1هرتزبه عنوان تقریبی از حرکت واقعی خودروی شناور. در نگاه اول، این نتیجه گیری با نتایج به دست آمده توسط سایر نویسندگان در تضاد است. در [ 45 ]، از شبیه سازی مونت کارلو برای نشان دادن اینکه خطای اندازه گیری در مسیرهای نمونه برداری شده در فرکانس های بالا اجازه محاسبه پارامترهای حرکت واقعی را نمی دهد استفاده می شود. با این حال، این شبیهسازی فرض میکند که خطای اندازهگیری GPS به طور کاملاً تصادفی بین هر دو تخمین موقعیت متوالی پراکنده میشود. شکل 1 نشان می دهد که این مورد برای FCD تجربی ما صادق نیست.
5. ارزیابی تأثیر خطای درونیابی
خطای درون یابی ارتباط نزدیکی با نرخ نمونه برداری زمانی دارد که حرکت در آن ثبت می شود: هر چه فاصله زمانی بین دو تخمین موقعیت کمتر باشد، خطای درون یابی کوچکتر است. در این بخش، تأثیر خطای درون یابی را بر پارامترهای حرکت مشتق شده از FCD در فرکانس های نمونه برداری مختلف نشان می دهیم. ما چهار معیار برای خطای درون یابی تعریف کردیم و آنها را با FCD تجربی شرح داده شده در بخش 3.1 ارزیابی کردیم .
5.1. تفکیک مجدد مسیرها
از آنجایی که رفتار واقعی یک خودروی شناور را نمی توان با اندازه گیری های گسسته توصیف کرد، FCD ثبت شده در فرکانس های نمونه برداری مختلف باید با یکدیگر مقایسه شود. رویکرد مشابهی در بومشناسی حرکت برای تجزیه و تحلیل اثرات نرخ نمونهبرداری بر پیادهرویهای تصادفی شبیهسازیشده استفاده میشود [ 39 ، 40 ]. ما FCD تجربی ثبت شده در را تعریف می کنیم 1هرتز1هرتزتا جنبش مرجع باشد. ما در بخش 4 نشان دادیم که FCD تحت تأثیر خودهمبستگی قرار گرفت. از این رو، این تقریب مشروع است. از FCD در 1هرتز1هرتزما مسیر مرجع را محاسبه کردیم ( Π0Π0، فاصله مرجع ( د0د0، سرعت مرجع ( v0�0) و جهت مرجع ( θ0�0) مطابق جدول 1 . سپس FCD را مجدداً تفکیک کردیم و پارامترهای حرکت را برای فواصل نمونه برداری بزرگتر دوباره محاسبه کردیم.
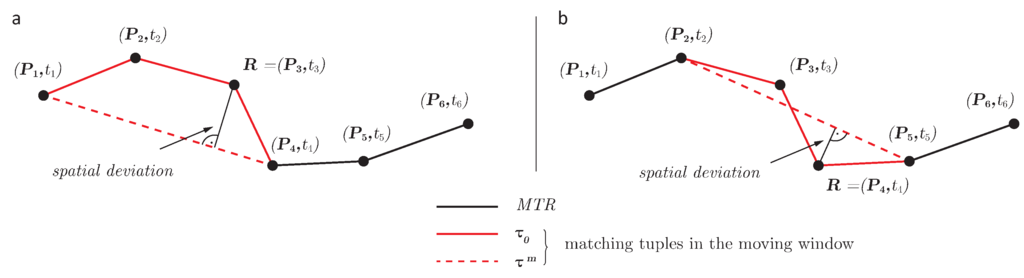
گسستهسازی مجدد عامل k توضیح میدهد که نرخ نمونهگیری موقت چقدر کاهش مییابد. به عنوان مثال، گسسته سازی مجدد از k = 3ک=3به این معنی که نرخ نمونه برداری از کاهش یافته است 1هرتز1هرتزبه 1/3 _ _هرتز1/3هرتز( شکل 2 را ببینید ). استفاده از پنجره متحرک در حین تفکیک مجدد تضمین می کند که فقط آن دسته از عناصر مرجع و حرکت تفکیک شده با هم مقایسه می شوند که نمایانگر همان مراحل حرکت هستند. برای گسسته سازی مجدد ضریب k ، هر پنجره متحرک ابتدا حرکت را به یک بخش مسیر تقسیم می کند τ0=< (پمن،تیمن) ، . . . ، (پi + k،تیi + k) >�0=<(پمن،تیمن)،...،(پمن+ک،تیمن+ک)>شامل k + 1ک+1موقعیت های مکانی-زمانی τ0�0سپس به تفکیک مجدد می شود τمتر=< (پمن،تیمن) ، (پi + k،تیi + k) >�متر=<(پمن،تیمن)،(پمن+ک،تیمن+ک)>متشکل از دو موقعیت مکانی-زمانی، یکی در موقعیت شروع τ0�0و دیگری در موقعیت انتهایی. τ0�0و τمتر�مترحرکت یکسان را در فواصل مختلف نمونه برداری نشان می دهد. بنابراین از آنها به عنوان یک جفت حرکت تطبیق یاد می شود.

شکل 2. تفکیک مجدد FCD. جنبش مرجع در 1هرتز1هرتزبه وضوح تفکیک مجدد می شود 1/3 _ _هرتز1/3هرتز، یعنی _ k = 3ک=3. در یک پنجره متحرک در محل اولیه خود قرار دارد و حرکت بین آن را در بر می گیرد (پ1،تی1)(پ1،تی1)و (پ4،تی4)(پ4،تی4). خط قرمز یکدست نشان دهنده حرکت مرجع و خط قرمز نقطه چین گسسته سازی مجدد آن است. در b پنجره متحرک به جلو منتقل شده است، به طوری که حرکت مرجع و گسسته سازی مجدد آن اکنون بین (پ2،تی2)(پ2،تی2)و (پ5،تی5)(پ5،تی5).
5.2. معیارهای خطای درون یابی
خطای درون یابی باعث ایجاد مسیر اندازه گیری شده می شود ΠمترΠمتربا مسیر مرجع متفاوت باشد Π0Π0. از این پس، ما از این به عنوان عدم قطعیت مسیر یاد می کنیم . عدم قطعیت مسیر نه تنها بر هندسه مسیر (نگاه کنید به شکل 3 ) بلکه فاصله درون یابی شده را نیز تحت تأثیر قرار می دهد.دمتردمتر. مانند دمتردمتراز یک خط مستقیم بین دو موقعیت پیروی می کند و همیشه کمتر یا مساوی با فاصله مرجع است د0د0.

شکل 3. عدم قطعیت مسیر و تأثیر آن بر فاصله اندازه گیری شده دمتردمتر. فاصله اندازه گیری شده دمتردمتر(خط چین) کوچکتر از فاصله مرجع است د0د0(خط توپر). خطای درون یابی باعث یک تخمین سیستماتیک فاصله می شود.
عدم قطعیت مسیر معیاری برای تفاوت مسیر پس از تفکیک مجدد است. برای هر جفت حرکت تطبیق، دو پارامتر را محاسبه کردیم که به ما امکان میدهد عدم قطعیت مسیر را توصیف کنیم، اینها تفاوت فاصله و حداکثر انحراف فضایی است.
تفاوت فاصله، از یک طرف، معیاری است که نشان می دهد طول فاصله تفکیک شده مجدد چقدر با فاصله مرجع متفاوت است:
D i s t a n c ed i f f e r e n c e =د0–دمترفاصلهتفاوت=د0–دمتر
انحراف فضایی، از سوی دیگر، معیاری است که نشان می دهد مکان مکانی مسیر تفکیک مجدد شده چقدر با مسیر مرجع تفاوت دارد. محاسبه انحراف فضایی بر اساس R ، نقطه امتداد استΠ0Π0که از همه دورتر است ΠمترΠمتر. در شکل 2 a، برای مثال، R در است (پ3،تی3)(پ3،تی3). فاصله عمودی (مکانی) از R تا ΠمترΠمترانحراف فضایی است. بدین ترتیب،
S p a t i a ld e v i a t i o n = D ( R،Πمتر)فضاییانحراف=�(آر،Πمتر)
از آنجایی که هر جفت حرکت منطبق دارای موقعیت های اول و آخر یکسان است و هر دو به صورت خطی درون یابی می شوند، R باید یکی از موقعیت های مسیر مرجع باشد. از این رو، محاسبه فاصله عمود از آن کافی است k − 1ک–1موقعیت های اندازه گیری شده بین نقطه شروع و پایان Π0Π0به ΠمترΠمترو سپس حداکثر از اینها را انتخاب کنید.
خطای درون یابی به دو صورت بر سرعت و جهت تأثیر می گذارد: اول اینکه عدم قطعیت مسیر باعث می شود سرعت و جهت اندازه گیری شده با سرعت و جهت مرجع متفاوت باشد. از آنجا که دمتر≤د0دمتر≤د0، خطای درون یابی تمایل به دست کم گرفتن سرعت دارد: جسم نمی تواند آهسته تر حرکت کند تا به موقعیت شناخته شده بعدی برسد. vمتر�متر، اما می توانست با سرعت بیشتری حرکت کند و مسیر طولانی تری را طی کند.
ثانیا، پیشرفت مکانی-زمانی جسم در طول مسیر نامشخص است. سرعت اندازه گیری شده vمتر�متریک مقدار متوسط در بازه زمانی بین دو تخمین موقعیت است. جسمی که با سرعت متغیر حرکت میکند و جسمی که با سرعت یکنواخت حرکت میکند میتواند سرعت متوسط یکسانی داشته باشد، اما تنها مورد دوم به طور مناسب توسط یک مسیر GPS ثبت میشود.
از این پس ما به عدم قطعیت در مورد مسیر مکانی و پیشرفت مکانی-زمانی یک شی به عنوان عدم قطعیت پویا اشاره می کنیم . این عدم قطعیت دو جنبه دارد. این باعث می شود vمتر�مترمتفاوت بودن از v0�0، به عنوان اختلاف سرعت و θمتر�مترمتفاوت بودن از θ0�0، به عنوان انحراف زاویه ای شناخته می شود.
تفاوت سرعت وسیله ای برای ارزیابی اطلاعات مربوط به سرعت در طول حرکت مرجع است که با درون یابی میانگین گیری شده است. برای گسسته سازی مجدد عامل k ، سرعت اندازه گیری شده است vمتر�مترابتدا بین دو موقعیت همراه محاسبه شد τمتر�متر. از آنجا که τ0�0شامل k + 1ک+1موقعیت ها k اندازه گیری سرعت مرجع بین اینها وجود دارد . در نتیجه، v0( من )�0(من)سرعت مرجع بین است منتی ساعتمنهفتمو من +1تی ساعتمن+1هفتمموقعیت های متوالی در کنار τمتر�متر، جایی که من ∈ { 1 , . . . ، ک }من∈{1،...،ک}. سپس، تفاوت بین هر یک را بازیابی کردیم v0( من )�0(من)و vمتر�متر. بنابراین، تفاوت سرعت به صورت تعریف می شود
S p e e dd i f f e r e n c e = |v0( من ) –vمتر|سرعتتفاوت=|�0(من)–�متر|
انحراف زاویه ای، از سوی دیگر، تفاوت مطلق بین جهت را توصیف می کند τمتر�مترنسبت به جهت τ0�0. همانطور که با اختلاف سرعت انجام دادیم، ابتدا جهت را محاسبه کردیم θمتر�متربین دو موقعیت در امتداد τمتر�متر. سپس جهت را محاسبه کردیم θ0( من )�0(من)بین منتی ساعتمنهفتمو من +1تی ساعتمن+1هفتمموقعیت در امتداد τ0�0، جایی که من ∈ { 1 , . . . ، ک }من∈{1،...،ک}. در نهایت، ما تفاوت مطلق بین هر یک را تعیین کردیم θ0( من )�0(من)و θمتر�متر. از این رو، انحراف زاویه ای به عنوان تعریف می شود
A n g u l a rd e v i a t i o n = |θ0( من ) –θمتر|زاویه ایانحراف=|�0(من)–�متر|
5.3. ارزیابی خطای درون یابی در FCD دنیای واقعی
در این بخش، اثرات خطای درون یابی بر پارامترهای حرکت مشتق شده از FCD در فرکانس های نمونه برداری مختلف را ارزیابی می کنیم. ما از مجموعه داده های شرح داده شده در بخش 3.1 استفاده کردیم .
شروع از FCD در 1هرتز1هرتزما 19 مرحله جداسازی مجدد مستقل فاکتور را انجام دادیم k ∈ { 2 , . . . , 20 }ک∈{2،...،20}. برای هر مرحله گسسته سازی مجدد، داده های مسیر را برای همه جفت های ممکن حرکت تطبیق جستجو کردیم. سپس پارامترهای حرکت را محاسبه کردیم و چهار معیار را برای خطای درون یابی ارزیابی کردیم. در پاراگراف زیر یافتههای خود را ارائه میکنیم و آنها را با توجه به نتایج شناخته شده نظریه RW تفسیر میکنیم.
شکل 4 تفاوت فاصله را پس از گسسته سازی مجدد نشان می دهد. تفاوت فاصله همیشه مثبت است. در مقایسه با د0د0، مسیرهای نمونه برداری شده در فرکانس های نمونه برداری پایین تر باعث دست کم گرفتن فاصله می شود. میانه، محدوده بین ربعی و سبیل ها تقریباً به صورت درجه دوم افزایش می یابد. با نمونه برداری کمتر از برخی از دمتردمتربسیار کوچک می شوند، در حالی که بقیه تقریباً بدون تغییر باقی می مانند.

شکل 4. اختلاف فاصله پس از تفکیک مجدد عامل k . در ( a )، طرح جعبه دارای سبیل هایی است 99 %99%چندک؛ در ( ب ) سبیل ندارد.
نتایج مشابهی نیز قبلاً در شبیهسازیهای پرش سرعت پیادهرویهای تصادفی همبسته توضیح و بررسی شده است [ 39 ، 40 ]. در یک فرآیند پرش سرعت، یک جسم با سرعت ثابتی برای یک بازه زمانی تصادفی حرکت میکند و سپس به سمت جدیدی میچرخد، که معمولاً از یک توزیع عادی دایرهای گرفته میشود. تکرار این مراحل یک پیاده روی تصادفی همبسته ایجاد می کند. در [ 39 ، 40نویسندگان این پیاده روی های تصادفی را با استفاده از کاهش فرکانس های نمونه برداری مجدداً تفکیک کردند و تغییر سرعت را پس از تفکیک مجدد ثبت کردند. آنها دریافتند که لگاریتم طبیعی منفی میانگین سرعت مشاهده شده به صورت خطی با کاهش نرخ نمونه برداری افزایش می یابد. این یافتهها را میتوان به راحتی با فاصله مرتبط کرد: از آنجایی که فرآیند پرش سرعت، سرعت واقعی را ثابت فرض میکند، هر تغییری در سرعت مشاهدهشده ناشی از تغییر در فاصله مشاهدهشده است. بنابراین این نتایج حاکی از کاهش در فاصله مشاهده شده و افزایش تغییرپذیری آن است. نتایج ما همچنین نشاندهنده افزایش اختلاف فاصله با کاهش نرخ نمونهبرداری، و همچنین افزایش در تغییرپذیری اختلاف فاصله است (محدوده بین چارکی و سبیلها را در شکل 4 ببینید ).
شکل 5 انحراف فضایی پس از گسسته سازی مجدد را نشان می دهد. با کاهش فرکانس های نمونه برداری، انحراف فضایی به طور درجه دوم افزایش می یابد. باز هم، این یافته به نظریه راه رفتن تصادفی مربوط می شود، جایی که میانگین جابجایی مجذور ( M S DMSD) برای توصیف میانگین وسعت فضایی یک حرکت تصادفی استفاده می شود. در یک پیاده روی تصادفی، M S DMSDبا کاهش نرخ نمونه برداری افزایش می یابد [ 36 ، 37 ].

شکل 5. انحراف فضایی پس از تفکیک مجدد عامل k . در ( a )، طرح جعبه دارای سبیل هایی است 99 %99%چندک؛ در ( ب ) سبیل ندارد.
شکل 6 تفاوت سرعت را پس از گسسته سازی مجدد نشان می دهد. برخلاف عدم قطعیت مسیر، اختلاف سرعت به صورت تقریبا لگاریتمی افزایش می یابد. این بدان معنی است که از دست دادن اطلاعات ناشی از کاهش فرکانس نمونه برداری از بالا به متوسط (مثلاً از k = 2ک=2به k = 5ک=5) بطور قابل ملاحظه ای بیشتر از تلفات ناشی از کاهش فرکانس نمونه برداری از متوسط به پایین است (مثلاً از k = 10ک=10به k = 15ک=15). این برای میانه، ربع و سبیل صادق است. به طور مشابه، شکل 7 تفاوت سرعت بین توالی های تطبیق را در امتداد یک مسیر GPS دنیای واقعی برای یکسان سازی مجدد نشان می دهد. k ∈ { 2 , 3 , 5 , 10 }ک∈{2،3،5،10}.
یافتههای شکل 6 با نتایج بهدستآمده در [ 39 ، 40 ] مطابقت دارد، جایی که تغییر سرعت مشاهدهشده در یک شبیهسازی به صورت نمایی یافت شد. با این وجود، یک تفاوت اساسی وجود دارد: تغییر در سرعت گزارش شده توسط این نویسندگان به دلیل تغییر فاصله مشاهدهشده در فرآیند پرش سرعت گسستهشده با سرعت ثابت بود. این مربوط به تفاوت فاصله در شکل 5 است . در مقابل، تفاوت سرعت در شکل 7 به دلیل تغییر در فاصله مشاهده شده و درک نادرست از دینامیک حرکت است. بنابراین تفاوت سرعت مشاهده شده بسیار بیشتر از اختلاف فاصله در شکل 4 است.
شکل 8 انحراف زاویه ای را پس از گسسته سازی مجدد نشان می دهد. همانطور که در مورد اختلاف سرعت بود، انحراف زاویه ای به صورت تقریبا لگاریتمی افزایش می یابد. تا k = 20ک=20میانه انحراف زاویه ای بسیار پایین تر است 10∘10∘. با این حال، حتی برای افزایش بسیار متوسط نرخ نمونه برداری به k = 2ک=2چارک بالایی در حال حاضر انحراف قابل توجهی را نشان می دهد 120∘120∘. مجدداً، نتایج در شکل 8 با نتایج شبیهسازیهایی که در آن انحراف زاویهای با کاهش نرخ نمونهبرداری تغییر لگاریتمی تغییر میکند، مطابقت خوبی دارد [ 40 ].

شکل 6. اختلاف سرعت پس از تفکیک مجدد ضریب k . در ( a )، طرح جعبه دارای سبیل هایی است 99 %99%چندک؛ در ( ب ) سبیل ندارد.

شکل 7. تفاوت سرعت برای گسسته سازی مجدد عامل k نگاشت شده به FCD ثبت شده در 1هرتز1هرتز. رنگ سبز نشان دهنده اختلاف سرعت کم است ( < 1کیلومتر در ساعت<1کیلومتر/ساعت)، رنگ قرمز تفاوت سرعت بالا ( > 20کیلومتر در ساعت>20کیلومتر/ساعت). نرخ نمونه برداری کمی کمتر ( k = 5ک=5) در حال حاضر منجر به از دست دادن شدید اطلاعات می شود. فازهای سبز و قرمز اغلب متناوب می شوند. به خصوص در نزدیکی تقاطعهای جادهای که سرعت خودرو کاهش مییابد یا شتاب میگیرد. 20کیلومتر در ساعت20کیلومتر/ساعتاز مرجع

شکل 8. انحراف زاویه ای پس از گسسته سازی مجدد عامل k . در ( a )، طرح جعبه دارای سبیل هایی است 99 %99%چندک؛ در ( ب ) سبیل ندارد.
6. توصیه های نمونه برداری موقت برای ضبط FCD با GPS
در این مقاله تأثیر خطا بر پارامترهای حرکت محاسبه شده از FCD ثبت شده با GPS را مورد بحث و بررسی قرار دادیم. اول، ما نشان دادیم که خطای اندازهگیری در FCD تجربی بسیار همبسته است. این اساس همه تحلیل های متوالی را ایجاد کرد. سپس چهار معیار برای ارزیابی تأثیر خطای درون یابی تعریف کردیم و آنها را در FCD تجربی ارزیابی کردیم. در این بخش، نتایج خود را خلاصه کرده و نتیجهگیریهای خود را میآوریم، که سپس از آن برای ارائه توصیههای نمونهگیری موقت برای ضبط FCD با GPS استفاده کردیم. هدف این توصیهها حفظ ویژگیهای واقعی پارامترهای حرکت و به حداقل رساندن تأثیر خطاها و در عین حال اجتناب از جمعآوری اطلاعات اضافی است. ترکیبی از توصیه های نمونه گیری را می توان درجدول 2 .
جدول 2. توصیه های نمونه گیری زمانی برای ضبط FCD با GPS. منطق پشت همه مقادیر به تفصیل در متن توضیح داده شده است.
6.1. مسیر
خطای درون یابی باعث انحراف فضایی می شود ΠمترΠمتراز جانب Π0Π0. در FCD تجربی، انحراف فضایی پس از گسست مجدد متوسط هنوز کوچک است ( شکل 5 را ببینید ). بنابراین ما یک نرخ نمونه برداری را پیشنهاد می کنیم 1/3 _ _1/3به 1/5 _ _هرتز1/5هرتزبرای ضبط مسیرها به منظور جلوگیری از ثبت اطلاعات اضافی. برای این نرخ نمونهبرداری، انحراف فضایی میانه هنوز بسیار پایینتر است 1متر1متر.
6.2. (تجمعی) فاصله
خطای اندازه گیری GPS باعث بیش از حد تخمین سیستماتیک فواصل می شود، در حالی که خطای درون یابی باعث کاهش سیستماتیک فاصله ها می شود. بنابراین یک نرخ نمونه گیری زمانی مناسب باید تعادلی بین این دو تأثیر متناقض پیدا کند. از دادههای تجربی ما مشاهده کردیم که به طور متوسط، این تعادل با نرخ نمونهگیری در حدود رخ میدهد 1/8 _ _هرتز1/8هرتز. برای این نرخ نمونهبرداری، میانگین تخمین بیش از حد فاصله ناشی از خطای اندازهگیری تقریباً برابر است 0 . 70.7متر (نگاه کنید به بخش 4 )، و همچنین تفاوت میانگین فاصله ناشی از خطای درون یابی (نگاه کنید به شکل 4 ). این مشاهدات مبتنی بر داده های تجربی است و بنابراین باید فقط به عنوان یک تقریب تقریبی در نظر گرفته شود. از این رو، ما یک نرخ نمونهگیری را پیشنهاد میکنیم 1/5 _ _1/5و 1/10 _ _هرتز1/10هرتزبرای ضبط فواصل توسط FCD. حد بالایی از 1/5 _ _هرتز1/5هرتزتمایل به تخمین بیش از حد فاصله دارد در حالی که حد پایینی از 1/10 _ _هرتز1/10هرتزتمایل به دست کم گرفتن دارد.
6.3. سرعت
به دلیل همبستگی خودکار خطای اندازهگیری، فرکانسهای نمونهگیری بالا تمایل دارند تا تأثیرات مثبتی بر محاسبه فواصل و سرعت داشته باشند. تأثیر خطای اندازه گیری برای سرعتی که از دو تخمین موقعیت که از نظر مکان و زمان نزدیک به هم هستند به دست می آید، خنثی می شود. با این حال، فرکانس های نمونه برداری بالا همچنین منجر به تخمین بیش از حد سیستماتیک مسافت و بنابراین سرعت می شود. در مقابل فاصله، سرعت تجمعی نیست و بنابراین، این خطاهای سیستماتیک جزئی تجمعی نیستند.
برای خطای درون یابی، آزمایشهای ما نشان میدهند که تفاوت سرعت در حال حاضر بهطور قابلتوجهی برای یک گسستهسازی مجدد کوچک افزایش مییابد ( شکل 7 را ببینید ) که باعث سرعت درونیابی میشود. vمتر�مترتفاوت قابل توجهی با v0�0. از آنجایی که هم خطاهای اندازه گیری و هم خطاهای درون یابی نشان می دهد که نمونه برداری بسیار مکرر مورد نیاز است، ما نرخ نمونه برداری حداقل 1 تا را پیشنهاد می کنیم. 1/2 _ _هرتز1/2هرتزبرای ثبت سرعت و شتاب از FCD.
6.4. جهت
به دلیل همبستگی مکانی-زمانی خطای اندازهگیری، فرکانسهای نمونهگیری بالا نیز تأثیر مثبتی بر محاسبه جهت دارند. با این حال، اگر دو موقعیت نامشخص دورتر از یکدیگر باشند، جهت بین آنها معمولا کمتر تحت تأثیر خطا قرار می گیرد. این در شکل 9 نشان داده شده است ، که در آن A و B دو موقعیت در فضا و آ“آ“و ب“ب“تخمین موقعیت GPS تحت تأثیر خطای اندازه گیری هستند.

شکل 9. تأثیر خطای اندازه گیری در جهت بین دو موقعیت نامشخص. زاویه γ تفاوت بین بردارها است A Bآبو آ“ب“آ“ب“. در ( a )، A و B نزدیک به هم هستند. در ( ب )، آنها از هم دورتر هستند. موقعیت نسبی آ“آ“به A و ب“ب“به B تغییر نمی کند. هنوز γ در (b) کوچکتر از (a) است.
اثرات خطای درون یابی بر انحراف زاویه ای در شکل 8 نشان داده شده است . برای سه چارک انحراف زاویه ای متوسط تا اطراف است 1/5 _ _هرتز1/5هرتزدر حالی که برای چارک بالایی باقی مانده، انحراف زاویه ای برای همه فرکانس های نمونه برداری بسیار زیاد است. ما نرخ نمونه برداری را در حدود پیشنهاد می کنیم 1/3 _ _1/3به 1/5 _ _هرتز1/5هرتزبرای ثبت جهت ها و زوایای چرخش.
جدول 2 یافته های ما را خلاصه می کند و توصیه های نمونه گیری زمانی را برای ضبط FCD با GPS ارائه می دهد. هدف این استراتژی کاهش تأثیر خطاهای اندازه گیری و درونیابی هنگام محاسبه پارامترهای حرکتی بین دو تخمین متوالی موقعیت GPS است. رویکردهای مشابه قبلاً در ادبیات منتشر شده برای پرداختن به جنبههای تکمیلی نمونهگیری دادههای حرکتی استفاده شده است. تکنیک های فیلتر برای کاهش خطای GPS نشان داده شد [ 30 ]. اثرات نرخ نمونه برداری بر پارامترهای حرکت در داده های پیاده روی تصادفی مصنوعی [ 39 ، 40 ] توضیح داده شد.
7. بحث
رویکرد ما با رویکردهای اتخاذ شده توسط نویسندگان قبلی متفاوت است: اولاً، ما بر نرخ نمونهگیری زمانی به عنوان تنها ابزار نظارتی برای کنترل کیفیت اطلاعات در دادههای مسیر تمرکز کردهایم. به عنوان مثال، فیلتر کردن در تحقیقات ما مورد توجه قرار نمی گیرد زیرا قبلاً توجه قابل توجهی از سوی نویسندگان دیگر به خود جلب کرده است [ 29 ، 30 ]. ثانیاً، پارامترهای حرکت ما از دادههای حرکت در دنیای واقعی بهجای تولید شبیهسازی مشتق شدهاند. داده های دنیای واقعی تحت تأثیر خطای اندازه گیری و درون یابی قرار می گیرند و اینها گاهی اوقات تأثیر متناقضی بر محاسبه پارامترهای حرکت دارند [ 15]]. در این تحقیق ما به هر دو نوع خطا پرداختیم، با هدف یافتن یک استراتژی متعادل برای کاهش آنها. به طور طبیعی، ویژگی های داده ها بر یافته های ما تأثیر می گذارد. FCD در سالزبورگ، شهری با خیابانهای باریک و زاویهدار بسیاری ضبط شد. ماشین های شناور اغلب سرعت خود را تغییر می دهند و مکررا می چرخند. بنابراین، انتظار می رود که خطای درون یابی بیشتر از شبکه جاده ای متشکل از خطوط مستقیم طولانی باشد که در آن اتومبیل ها به طور یکنواخت حرکت می کنند.
گاهی اوقات ممکن است استفاده از فرکانس های نمونه گیری توصیه شده در این مقاله برای ضبط FCD امکان پذیر نباشد. بنابراین، ما در مورد چگونگی تفسیر نتایج مفید از دادههای نمونهگیری پراکنده بحث میکنیم. اولاً، برخی از پارامترهای حرکت تحت تأثیر نرخ نمونهبرداری قرار نمیگیرند. شاخص سینوسی معیاری است برای اینکه حرکت هدف گرا چقدر است [ 36] و نرخ نمونه بر آن تأثیری ندارد. در مرحله دوم، FCD را می توان با اطلاعات جغرافیایی اضافی افزایش داد. به جای حرکت آزادانه در فضا، خودروهای شناور در یک شبکه جاده ای محدود می شوند. اطلاعات هندسی و اسنادی شبکه می تواند برای بازسازی حرکت خودرو مفید باشد. برای مثال، فاصله در امتداد یک شبکه جادهای ممکن است اجازه دهد تا تخمین دقیقی از مسافت طی شده یک وسیله نقلیه انجام شود، جایی که دادهها به صورت پراکنده نمونهبرداری میشوند. ثالثاً، مدلهای احتمالی مانند مدل حرکت پل براونی [ 34] را می توان برای توصیف حرکت احتمالی یک جسم به جای یک خط واضح که توسط درون یابی خطی تعریف می شود استفاده کرد. در یک شبکه جادهای، حرکت محتمل مجموعهای از تمام مسیرهایی است که به وسیله نقلیه اجازه میدهد در زمان در دسترس به موقعیت اندازهگیریشده بعدی در طول مسیر حرکت کند [ 27 ]. با این حال، حتی برای FCD که در فرکانسهای نمونهبرداری کمتر ثبت شدهاند، یافتههای ما میتواند آموزنده باشد. آنها خطایی را آشکار می کنند که به احتمال زیاد هنگام جمع آوری FCD معرفی شده است.
فضای اقلیدسی یا فضای شبکه؟
در این مقاله تمامی پارامترهای حرکتی در فضای اقلیدسی دو بعدی محاسبه شد. با این حال، اتومبیل های شناور در یک شبکه جاده حرکت می کنند. برای بسیاری از کاربردهای عملی لازم است ابتدا FCD را با فضای شبکه مطابقت دهیم. در فضای شبکه موقعیت فعلی خودروی شناور را می توان به صورت ترکیبی از شناسه پیوند و موقعیت نسبی روی پیوند بیان کرد [ 46 ]. در این بخش، تأثیر نرخ نمونه برداری بر پارامترهای تطبیق نقشه و حرکت در فضای شبکه را مورد بحث قرار می دهیم. ما روی دو جنبه زیر تمرکز می کنیم:
-
چگونه یافته های ما می توانند از تطبیق نقشه از فضای دو بعدی به فضای شبکه پشتیبانی کنند؟
-
کدام پارامترهای حرکتی باید از مسیر در فضای اقلیدسی دو بعدی و کدام در فضای شبکه محاسبه شوند؟
(1) از آنجایی که داده های شناور خودرو تحت تأثیر خطا قرار می گیرند، نمی توان آنها را به سادگی به فضای شبکه نمایش داد. به دلیل خطای اندازه گیری، تخمین های موقعیت احتمالاً از جاده ها خارج می شوند. علاوه بر این، به دلیل خطای درون یابی، ممکن است یافتن یک مسیر منحصر به فرد بین دو تخمین موقعیت که به درستی با نقشه تطبیق داده شده اند، امکان پذیر نباشد. از این رو، یک الگوریتم تطبیق نقشه برای مرتبط کردن مسیر GPS به شبکه جاده مورد نیاز است. چهار نوع الگوریتم تطبیق نقشه وجود دارد [ 47]. الگوریتم های هندسی از ویژگی های هندسی مسیر و شبکه راه ها استفاده می کنند. الگوریتم های توپولوژیکی اتصال و توپولوژی شبکه جاده ها را نیز در نظر می گیرند. الگوریتمهای احتمالی یک منطقه خطا در اطراف هر تخمین موقعیت GPS ایجاد میکنند تا پیوندهای نامزد در شبکه جادهای را که ممکن است خودرو در آن سفر کرده باشد، مشخص کنند. از میان این نامزدها، الگوریتم محتمل ترین را انتخاب می کند. الگوریتمهای تطبیق نقشه پیشرفته از مفاهیم آماری پیشرفته برای پیوند دادن مسیر به شبکه جادهها استفاده میکنند.
اکثر الگوریتم های تطبیق نقشه به پارامترهای حرکتی قابل اعتماد برای مرتبط کردن یک مسیر به یک شبکه جاده ای نیاز دارند. این پارامترهای حرکتی ناگزیر باید در فضای دو بعدی اقلیدسی محاسبه شوند. الگوریتم های هندسی ساده فقط مسیر و شکل آن را در نظر می گیرند [ 48 ، 49 ]. سایر الگوریتمهای پیچیدهتر، جهت مسیر را با جهت پیوندها در شبکه جاده مقایسه میکنند [ 50 ]. با این حال، الگوریتمهای دیگر از اطلاعات مسافت طی شده [ 51 ] یا سرعت خودروی شناور [ 52 ] استفاده میکنند. یافتههای ما میتواند به انتخاب یک الگوریتم تطبیق نقشه مناسب برای نرخ نمونهگیری معین کمک کند. ما نشان دادیم که برای مسیرهای نمونه برداری شده در 1هرتز1هرتزجهت تمایل به ناپایدار بودن و فاصله ها بیش از حد برآورد می شود. برای مسیرهای نمونه برداری شده در 1/5 _ _هرتز1/5هرتزسرعت متوسط نمی تواند سرعت واقعی ماشین را منعکس کند. برای مسیرهای نمونه برداری شده در 1 / _هرتز1/20هرتزمسیر ثبت شده در حال حاضر به طور قابل توجهی با مسیر واقعی متفاوت است. این مثالها نشان میدهند که FCD بسته به نرخ نمونهگیری که در آن ثبت شدهاند، به رویکردهای تطبیق نقشه متفاوتی نیاز دارند.
برای FCD ثبت شده با نرخ نمونه برداری بسیار پایین ( < 1/20 _ _هرتز<1/20هرتز) الگوریتم های سنتی تطبیق نقشه احتمالاً نتایج ضعیفی ارائه می دهند. بنابراین، الگوریتم های ویژه ای برای FCD فرکانس پایین باید استفاده شود [ 46 ، 53 ]. این الگوریتم ها تخمین موقعیت را با مسیرهای نامزد متصل می کنند. مسیر با محتمل ترین این مسیرها مطابقت دارد. با این حال، همچنین دقت این الگوریتم ها با نرخ نمونه گیری کاهش می یابد [ 54 ]. در نرخهای نمونهگیری پایینتر، مسیرهای احتمالی زیادی بین دو تخمین موقعیت متوالی وجود دارد و تطبیق نقشه به احتمال زیاد پیوند نادرست را انتخاب میکند [ 28 ].
(2) در نهایت، ما بحث می کنیم که کدام داده ها برای محاسبه پارامترهای حرکت مناسب تر هستند، داده های خط سیر GPS خام در فضای دو بعدی یا داده های مسیر مطابق نقشه در فضای شبکه. در فضای دوبعدی، اگر نمونه برداری بیش از حد مکرر باشد، یک مسیر طولانی تر از آنچه بود، خواهد بود. اگر نمونه برداری خیلی کم باشد، کوتاهتر خواهد بود. به منظور اجتناب از خطای سیستماتیک در هر جهت، ترجیح داده می شود که ابتدا FCD را با نقشه تطبیق دهید و فواصل را در فضای شبکه استخراج کنید. برای مسیر و جهت نیز می توان استدلال های مشابهی ارائه داد. شبکه جاده مسیر و جهت یک خودروی شناور را مشخص می کند. بنابراین، منطقی تر است که هر دو را از مسیر مطابق نقشه استنتاج کنیم. با این حال، اگر سرعت متوسط از فضای شبکه گرفته شود، طرح ریزی از فضای دو بعدی ممکن است دو موقعیت را از بین ببرد. که باعث می شود گهگاه سرعت را سریعتر یا کندتر از آنچه واقعاً بود می کند. از آنجایی که مسیرهای GPS تحت تأثیر همبستگی مکانی-زمانی قوی قرار می گیرند، محاسبات سرعت بین دو تخمین موقعیت متوالی باید بسیار دقیق باشد. از این رو، محاسبه سرعت متوسط در فضای اقلیدسی دو بعدی ترجیح داده می شود.
منابع
- Ehmke، JF; مایزل، اس. Mattfeld، DC زمان سفر بر اساس ماشین شناور برای تدارکات شهر. ترانسپ Res. C 2012 ، 21 ، 338-352. [ Google Scholar ] [ CrossRef ]
- آندرینکو، جی. آندرینکو، ن. هرتر، سی. رینزیویلو، اس. Wrobel, S. از مسیرهای حرکت از طریق رویدادها به مکان ها: استخراج و مشخص کردن مکان های مهم از داده های تحرک. در مجموعه مقالات کنفرانس IEEE 2011 در علم و فناوری تجزیه و تحلیل بصری (VAST)، پراویدنس، RI، ایالات متحده آمریکا، 23 تا 28 اکتبر 2011. صص 161-170.
- جیانوتی، اف. نانی، م. پدرشی، دی. پینلی، اف. رنسو، سی. رینزیویلو، اس. Trasarti، R. پرده برداری از پیچیدگی تحرک انسان با جستجو و استخراج داده های عظیم مسیر. VLDB J. 2011 ، 20 ، 695-719. [ Google Scholar ] [ CrossRef ]
- ژنگ، ی. لیو، ی. یوان، جی. Xie, X. محاسبات شهری با تاکسی. در مجموعه مقالات سیزدهمین کنفرانس بین المللی محاسبات همه جا حاضر، پکن، چین، 17-21 سپتامبر 2011. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2011; صص 89-98. [ Google Scholar ]
- پاپالاردو، ال. رینزیویلو، اس. Qu، Z. پدرشی، دی. Giannotti، F. درک الگوهای سفر با ماشین. یورو فیزیک J. Spec. بالا. 2013 ، 215 ، 61-73. [ Google Scholar ] [ CrossRef ]
- بروناور، آر. Rehrl, K. استخراج اطلاعات سفر محور راننده با الگوهای تأخیر استخراج از مسیرهای تک GPS. در مجموعه مقالات هفتمین کارگاه بین المللی ACM SIGSPATIAL در علوم حمل و نقل محاسباتی، دالاس، تگزاس، ایالات متحده آمریکا، 4 نوامبر 2014. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; صص 25-30. [ Google Scholar ]
- یاکوبسن، ک. Mouritsen, SCH; Torp، K. ارزیابی توصیه های رانندگی با محیط زیست با استفاده از داده های GPS/CANBus. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، اورلاندو، فلوریدا، ایالات متحده آمریکا، 5 تا 8 نوامبر 2013. صص 44-53.
- برورینگ، آ. رمکه، ا. استاش، سی. اوترمن، سی. ریکه، ام. Möllers, J. EnviroCar: یک پلتفرم علمی شهروندی برای تجزیه و تحلیل و نقشهبرداری دادههای حسگر خودرو با منبع جمعیت. ترانس. GIS 2015 ، 19 ، 362-376. [ Google Scholar ] [ CrossRef ]
- مکدو، جی. وانگنوت، سی. عثمان، دبلیو. پلکیس، ن. فرنتزوس، ای. کویجپرز، بی. نتوسی، س. اسپاکاپیترا، اس. تئودوریدیس، Y. مدل های داده مسیر. در تحرک، داده کاوی و حریم خصوصی: کشف دانش جغرافیایی ؛ Giannotti, F., Pedreschi, D., Eds. Springer: برلین، آلمان، 2008; بخش 5; صص 123-150. [ Google Scholar ]
- اشنایدر، ام. مدیریت عدم قطعیت برای داده های مکانی در پایگاه های داده: انواع داده های فضایی فازی. در مجموعه مقالات پیشرفتها در پایگاههای داده فضایی – ششمین سمپوزیوم بینالمللی، هنگ کنگ، چین، 20 تا 23 ژوئیه 1999. Springer: برلین، آلمان، 1999; صص 330-351. [ Google Scholar ]
- دوج، اس. ویبل، آر. Lautenschütz، AK به سوی طبقه بندی الگوهای حرکت. Inf. Vis. 2008 ، 7 ، 13. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پاتیره، AD; رایت، ام. پرودهوم، بی. Bayen، AM به چه مقدار داده GPS نیاز داریم؟ ترانسپ Res. C 2015 ، 58 ، 325-342. [ Google Scholar ] [ CrossRef ]
- باکنل، سی. هررا، JC تجزیه و تحلیل مبادله بین نرخ نفوذ و فرکانس نمونه برداری از حسگرهای تلفن همراه در برآورد وضعیت ترافیک. ترانسپ Res. C 2014 ، 46 ، 132-150. [ Google Scholar ] [ CrossRef ]
- موریرا، ا. سانتوس، من؛ واچوویچ، ام. Orellana، D. تاثیر کیفیت داده ها در زمینه تحلیل حرکت عابر پیاده. در تفکر جغرافیایی ; Springer: برلین، آلمان، 2010; صص 61-78. [ Google Scholar ]
- پالمر، MC محاسبه مسافت طی شده توسط کشتی های ماهیگیری با استفاده از داده های موقعیتی GPS: یک ارزیابی نظری از منابع خطا. ماهی. Res. 2008 ، 89 ، 57-64. [ Google Scholar ] [ CrossRef ]
- هافمن-ولنهوف، بی. لگات، ک. Wieser, M. Navigation: Principles of Positioning and Guidance ; Springer: وین، اتریش، 2003; پ. 427. [ Google Scholar ]
- ویلیام، جی. مرکز فنی هیوز گزارش تجزیه و تحلیل عملکرد سیستم موقعیت یابی جهانی (GPS) سرویس موقعیت یابی استاندارد (SPS) ; اداره هوانوردی فدرال: واشنگتن، دی سی، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- Olynik، M. ویژگی های زمانی منابع خطای GPS و تأثیر آنها بر موقعیت یابی نسبی . دانشگاه کلگری: کلگری، کانادا، 2002. [ Google Scholar ]
- مدشینگ، ام. کرامر، آر. ten Hagen، K. آزمایش میدانی در مورد دقت GPS در یک شهر با اندازه متوسط: تأثیر ساختوساز. در مجموعه مقالات سومین کارگاه آموزشی موقعیت یابی، ناوبری و ارتباطات، هانوفر، آلمان، 16 مارس 2006. ص 209-218.
- Zandbergen، PA دقت مکانهای آیفون: مقایسه GPS کمکی، WiFi و موقعیتیابی سلولی. ترانس. GIS 2009 ، 13 ، 5-25. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. ساتیراپود، سی. Rizos, C. ارزیابی تصادفی اندازه گیری فاز حامل GPS برای موقعیت یابی نسبی استاتیک دقیق. جی. جئود. 2002 ، 76 ، 95-104. [ Google Scholar ] [ CrossRef ]
- الربانی، ع. Kleusberg، A. اثر همبستگی فیزیکی زمانی بر تخمین دقت در موقعیت یابی نسبی GPS. J. Surv. مهندس 2003 ، 129 ، 28-32. [ Google Scholar ] [ CrossRef ]
- هاویند، جی. کوترر، اچ. هک، ب. تأثیر همبستگی های زمانی بر موقعیت های نقطه نسبی حاصل از GPS. جی. جئود. 1999 ، 73 ، 246-258. [ Google Scholar ] [ CrossRef ]
- راناچر، پ. بروناور، آر. تروتشنیگ، دبلیو. ون در اسپک، اس. ریچ، اس. چرا GPS مسافت ها را بزرگتر از آنچه که هستند می کند. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 316-333. [ Google Scholar ] [ CrossRef ]
- Hägerstrand، T. در مورد افراد در علوم منطقه ای چطور؟ پاپ Reg. علمی 1970 ، 24 ، 6-21. [ Google Scholar ] [ CrossRef ]
- Pfoser، D.; جنسن، سی. ثبت عدم قطعیت بازنماییهای شی متحرک. در پیشرفت در پایگاه داده های فضایی ; Springer: برلین، آلمان، 1999; صص 111-131. [ Google Scholar ]
- ژنگ، ک. ترایچفسکی، جی. ژو، ایکس. Scheuermann, P. پرس و جوهای محدوده احتمالی برای مسیرهای نامشخص در شبکه های جاده ای. در مجموعه مقالات چهاردهمین کنفرانس بین المللی گسترش فناوری پایگاه داده، اوپسالا، سوئد، 21 تا 24 مارس 2011. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2011; صص 283-294. [ Google Scholar ]
- تانگ، جی. آهنگ، ی. میلر، اچ جی; ژو، ایکس. تخمین محتمل ترین مسیرهای فضا-زمان، زمان های اقامت و عدم قطعیت های مسیر از داده های مسیر وسیله نقلیه: یک روش جغرافیایی زمانی. ترانسپ Res. ج: ظهور. تکنولوژی 2015 . [ Google Scholar ] [ CrossRef ]
- پدر و مادر، سی. اسپاکاپیترا، اس. رنسو، سی. آندرینکو، جی. آندرینکو، ن. بوگورنی، وی. دامیانی، ام.ال. گکولالاس-دیوانیس، ع. مکدو، جی. پلکیس، ن. و همکاران مدلسازی و تحلیل مسیرهای معنایی کامپیوتر ACM. نظرسنجی 2013 ، 45 ، 1-32. [ Google Scholar ] [ CrossRef ]
- جون، ج. گونسلر، آر. روشهای Ogle، JH Smoothing برای به حداقل رساندن تأثیر خطای تصادفی سیستم موقعیتیابی جهانی بر برآورد مسافت سفر، سرعت و پروفیل شتاب. ترانسپ Res. ضبط: J. Transp. Res. هیئت 2006 ، 1972 ، 141-150. [ Google Scholar ] [ CrossRef ]
- پترسون، تی. توماس، ال. ویلکاکس، سی. اواسکاینن، او. ماتیوپولوس، جی. مدلهای فضایی حالت حرکت حیوانات فردی. Trends Ecol. تکامل. 2008 ، 23 ، 87-94. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- مورالس، جی. هایدون، دی. فرایر، جی. هولسینگر، ک. Fryxell, J. استخراج بیشتر از داده های جابجایی: ساخت مدل های حرکتی به عنوان مخلوطی از پیاده روی تصادفی. اکولوژی 2004 ، 85 ، 2436-2445. [ Google Scholar ] [ CrossRef ]
- بوچین، ک. سیجبن، اس. Arseneau، TJM; ویلمز، EP تشخیص الگوهای حرکتی با استفاده از پل های قهوه ای. در مجموعه مقالات بیستمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 7-9 نوامبر 2012. صص 119-128.
- Benhamou، S. رویکرد پویا به فضا و استفاده از زیستگاه بر اساس پل های تصادفی مغرضانه. PLoS ONE 2011 ، 6 ، 1-8. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Codling، EA; پلانک، ام جی; Benhamou، S. مدل های راه رفتن تصادفی در زیست شناسی. JR Soc. رابط 2008 ، 5 ، 813-834. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بووت، پی. بنهامو، اس. تحلیل فضایی حرکات حیوانات با استفاده از مدل پیاده روی تصادفی همبسته. جی. تئور. Biol. 1988 ، 131 ، 419-433. [ Google Scholar ] [ CrossRef ]
- Benhamou، S. چگونه می توان به طور قابل اعتماد پیچ خوردگی مسیر یک حیوان را تخمین زد: راستی، سینووسیت، یا بعد فراکتال؟ جی. تئور. Biol. 2004 ، 229 ، 209-220. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کاریوا، پ. Shigesada، N. تجزیه و تحلیل حرکت حشرات به عنوان یک راه رفتن تصادفی همبسته. Oecologia 1983 ، 56 ، 234-238. [ Google Scholar ] [ CrossRef ]
- Codling، EA; هیل، ن. اثرات نرخ نمونه بر روی اندازه گیری پیاده روی تصادفی همبسته و مغرضانه. جی. تئور. Biol. 2005 ، 233 ، 573-588. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- راسر، جی. فلچر، ا. ماینی، پ. بیکر، آر. تأثیر نرخ نمونه گیری بر آمار مشاهده شده در یک پیاده روی تصادفی همبسته. JR Soc. رابط 2013 , 10 . [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژنگ، ی. چن، ی. لی، کیو. Xie، X. Ma, WY درک حالت های حمل و نقل بر اساس داده های GPS برای برنامه های کاربردی وب. ACM Trans. وب (TWEB) 2010 ، 4 ، 1-36. [ Google Scholar ] [ CrossRef ]
- Mumford، P. مشخصات زمانبندی نسبی پالس خروجی یک پالس در ثانیه (1PPS) سه گیرنده GPS. در مجموعه مقالات ششمین سمپوزیوم بینالمللی فناوری ناوبری ماهوارهای شامل موقعیتیابی تلفن همراه و خدمات مکان (SatNav 2003)، ملبورن، ویک، استرالیا، 22 تا 25 ژوئیه 2003. ص 22-25.
- بروتون، ا. گلنی، سی. شوارتز، ک. تمایز برای تعیین سرعت و شتاب GPS با دقت بالا. راه حل GPS. 1999 ، 2 ، 7-21. [ Google Scholar ] [ CrossRef ]
- قدوس، م. واشنگتن، اس. کوتاهترین مسیر و مسیر وسیله نقلیه به تطبیق نقشه برای داده های GPS فرکانس پایین کمک می کند. ترانسپ Res. C 2015 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لاوب، پی. Purves، RS سرعت یک گاو چقدر است؟ تجزیه و تحلیل مقیاس متقابل داده های حرکت. ترانس. GIS 2011 ، 15 ، 401-418. [ Google Scholar ] [ CrossRef ]
- چن، توسط; یوان، اچ. لی، کیو. شاو، اس ال. لام، WHK; چن، ایکس. مدل داده های مکانی-زمانی برای تحلیل جغرافیایی زمان شبکه در عصر داده های بزرگ. بین المللی جی. جئوگر. Inf. علمی 2015 . [ Google Scholar ] [ CrossRef ]
- قدوس، م. Ochieng، WY; Noland، RB الگوریتمهای تطبیق نقشه فعلی برای کاربردهای حمل و نقل: جدیدترین و جهتهای تحقیقاتی آینده. ترانسپ Res. ج: ظهور. تکنولوژی 2007 ، 15 ، 312-328. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سفید، CE; برنشتاین، دی. Kornhauser، AL برخی از الگوریتم های تطبیق نقشه برای دستیاران ناوبری شخصی. ترانسپ Res. ج: ظهور. تکنولوژی 2000 ، 8 ، 91-108. [ Google Scholar ] [ CrossRef ]
- چینگ جی، ک. کیانکون، ز. چائو، دبلیو. Yuncai، L. برآورد وضعیت ترافیک کارآمد برای شبکه های جاده ای شهری در مقیاس بزرگ. IEEE Trans. هوشمند ترانسپ سیستم 2013 ، 14 ، 398-407. [ Google Scholar ]
- منگیین، اف. جی، ال. Meiling، W. الگوریتم تطبیق نقشه ترکیبی بر اساس قضاوت جامع فازی. در مجموعه مقالات هفتمین کنفرانس بین المللی IEEE در مورد سیستم های حمل و نقل هوشمند، واشنگتن، دی سی، ایالات متحده آمریکا، 3 تا 6 اکتبر 2004. صص 613-617.
- سید، س. کانن، M. الگوریتم تطبیق نقشه مبتنی بر منطق فازی برای سیستم ناوبری خودرو در دره های شهری. در مجموعه مقالات نشست فنی ملی ION، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 26-28 ژانویه 2004. جلد 1، ص 26-28.
- قدوس، م. اوچینگ، دبلیو. ژائو، ال. Noland, R. الگوریتم تطبیق نقشه کلی برای برنامه های کاربردی مخابراتی حمل و نقل. راه حل GPS. 2003 ، 7 ، 157-167. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رحمانی، م. کوتسوپولوس، استنتاج مسیر HN از دادههای شناور پراکنده خودرو برای شبکههای شهری. ترانسپ Res. ج: ظهور. تکنولوژی 2013 ، 30 ، 41-54. [ Google Scholar ] [ CrossRef ]
- چن، توسط; یوان، اچ. لی، کیو. لام، WHK; شاو، اس ال. Yan, K. الگوریتم تطبیق نقشه برای دادههای ماشین شناور با فرکانس پایین در مقیاس بزرگ. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 22-38. [ Google Scholar ] [ CrossRef ]
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر