

خلاصه
بهینه سازی ازدحام ذرات ; یادگیری چندین هسته ماشین بردار ارتباط ; حساسیت زمین لغزش ; سیستم اطلاعات جغرافیایی (GIS)
1. معرفی
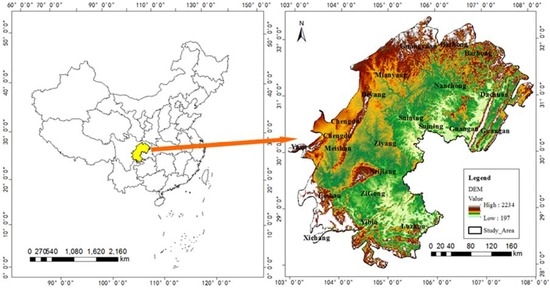
2. منطقه مطالعه
3. روش ها
3.1. ماشین بردار مربوط
جایی که εمن= ن( 0 ,σ2)��=�(0,�2)نویز گاوسی افزودنی است، ایکس�بردار ورودی است که باید پیش بینی شود، ω =[ω0،ω1،ω2, … , ωم]تی�=[�0,�1,�2, …,��]�، ωمن ��مدل “وزن” است، ω0 �0انحراف است و ک( x _ایکسمن)�(�,��)تابع هسته انتخاب شده است.
جایی که تی∗�*هدف پیشبینی بردار ورودی جدید است ایکس�.
جایی که μمن��عنصر i بردار میانگین پسینی ( μ ) اوزان است ،∑من ، من∑�,�عنصر قطری i- امین ماتریس کوواریانس است( ∑ ) و γمن= 1 –∂من∑من ، من(∑) and ��=1−∂�∑�,�. در فرآیند آموزش، معادله (6) به تکرار تا زمانی ادامه میدهد ∂n e wمن∂����و (σ2)n e w(�2)���تقریبا هستند ∂مپ∂��و σ2مپ���2. در آن صورت، بیشتر ∂من ∂� تمایل به بی نهایت، و مربوطه ωمن��تمایل به 0. در نهایت، چند ω�تمایل به مقادیر متناهی و متناظر با آنها دارند ایکسمن��بردارهای مربوط به مدل RVM هستند.
جایی که t ={تیn}مn = 1�={��}�=1�و معیار تشخیص زمین لغزش عبارت است از:
3.2. RVM کرنل چندگانه
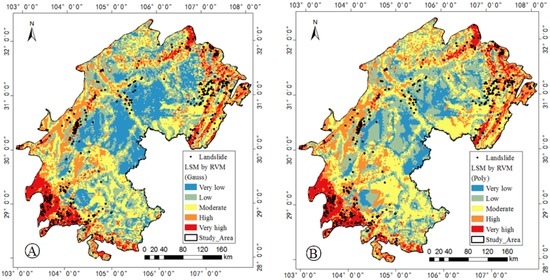
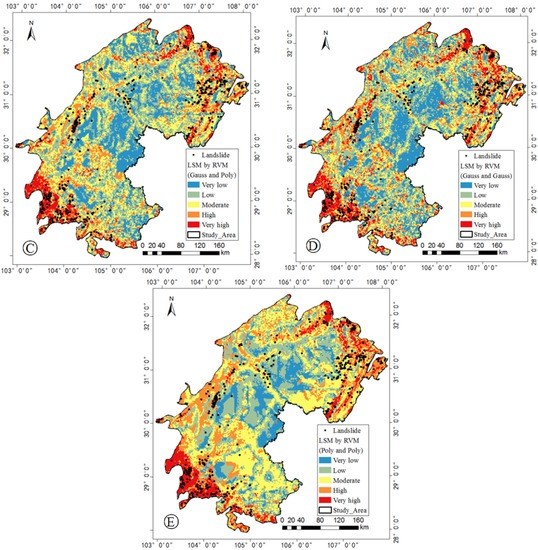
جایی که کgیک شما _ _( x _ایکسمن)ک�آتوسس(ایکس،ایکسمن)تابع هسته گاوسی است و کپی و یا _( x _ایکسمن)کپ�ل�(ایکس،ایکسمن)تابع هسته چند جمله ای است. وزن هسته β( β∈ ( 0 , 1 ) )�(�∈(0،1))یک عامل تنظیمی است که برای تنظیم سهم هر کرنل استفاده می شود. چه زمانی β�1 است، تابع چند هسته ای همان تابع هسته گاوسی است و چه زمانی β�0 است، تابع چند هسته ای برابر با یک تابع هسته چند جمله ای است. هر چه وزن هسته بیشتر باشد، سهم هسته مربوطه بیشتر خواهد بود کm i x( x _ایکسمن) کمترمنایکس(ایکس،ایکسمن).
3.3. بهینه سازی ازدحام ذرات
جایی که vمن�منسرعت ذره است، ایکسمن ایکسمن یک ذره منفرد است، ω � وزن اینرسی است، پb e s t( من ) پبهستی(من) و جیb e s t( من )جیبهستی(من)بهترتیب بهینهسازیهای فردی و سراسری در تکرار i- ام هستند ، r1�1و r2�2اعداد تصادفی (0-1) و ج1ج1و ج2ج2عوامل یادگیری هستند
- (1)
-
چه زمانی fکمن≤f“a v g�منک≤�آ��“برازش این ذرات به جواب بهینه (کمترین میزان خطا) نزدیکتر است. بنابراین، مقدار وزن اینرسی کم را تنظیم کنید ( ω = 0.2 )(�=0.2)برای سرعت بخشیدن به همگرایی محلی
- (2)
-
چه زمانی fکمن<f” “a v g�منک<�آ��““و fکمن>f“a v g�منک>�آ��“، این ذرات نسبتاً با بهترین تناسب فاصله دارند که می تواند با مدل ابری بهبود یابد.انتظار از مدل ابری است سابق =fکb e s tسابق=�بهستیک.آنتروپی را می توان با استفاده از فاصله انتظار و f“a v g�آ��“: En = (f“a v g–fکb e s t) /ج1En=(�آ��“–�بهستیک)/ج1.علاوه بر این، هیپر آنتروپی با استفاده از آن تنظیم شد او = En /ج2او=En/ج2.مقدار وزن اینرسی را می توان به صورت زیر توصیف کرد:ω = 0.9 – 0.5ه–(fکمن– سابق )22(En“)2، En‘= normrnd ( En , He )�=0.9–0.5ه–(�منک–سابق)22(En“)2، En‘=normrnd(En،او)طبق قوانین “3En”، پارامترهای کنترل ج1ج1و ج2ج2روی 3 و 10 تنظیم شدند [ 24 ]. “normrnd” داده های توزیع شده معمولی را تولید می کند.
- (3)
-
چه زمانی fکمن≥f” “a v g�منک≥�آ��““، این ذرات به وزن اینرسی بالاتری نیاز دارند ( ω = 0.9 )(�=0.9)برای بهبود قابلیت جستجوی جهانی
3.4. PSO-MKRVM
4. داده ها
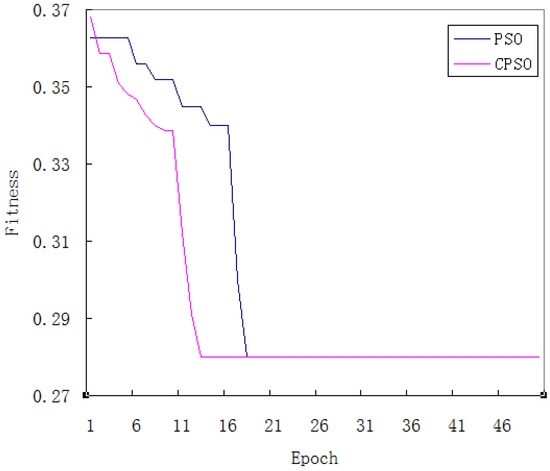
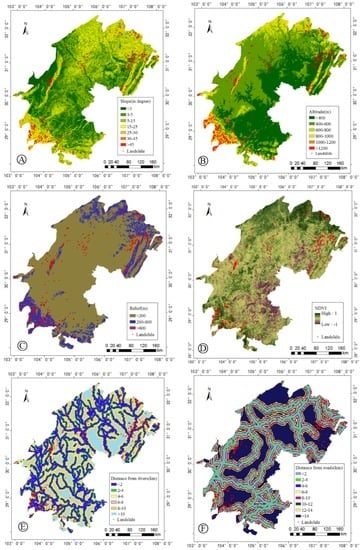
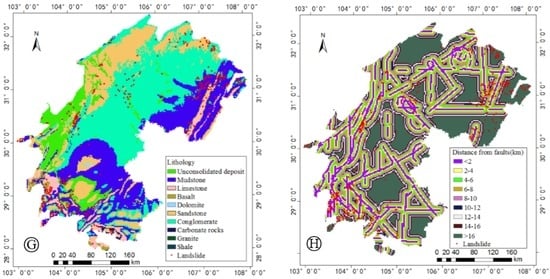
4.1. عوامل موثر بر زمین لغزش
4.2. پردازش عادی سازی
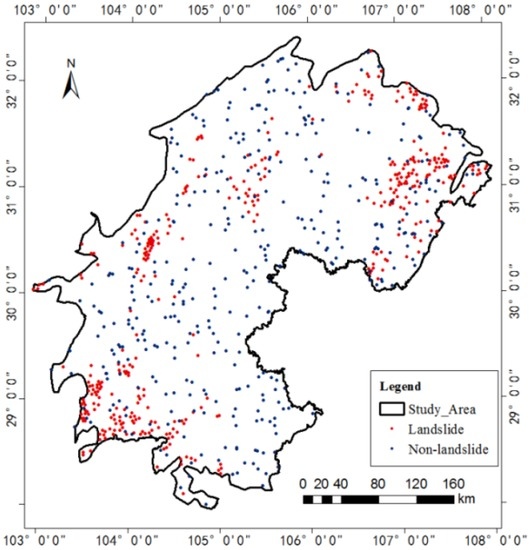
جایی که x ( x ∈ [ایکسm i n،ایکسm a x] )ایکس(ایکس∈[ایکسمترمن�،ایکسمترآایکس])مقدار واقعی یک عامل را نشان می دهد، ایکسm i nایکسمترمن�و ایکسm a xایکسمترآایکسبه ترتیب حداقل و حداکثر آن عامل و ایکس“∈ ( 0 − 1 )ایکس“∈(0–1)نتیجه عادی سازی است. زمین لغزش ها به دو حالت 1 (لغزش) و 0 (غیر لغزش) تقسیم شدند. برای اطمینان از پایایی و پایداری مدلهای پیشبینی، از روش اعتبارسنجی متقابل 5 برابری برای تقسیم 750 نمونه آموزشی به پنج قسمت مساوی استفاده شد. در فرآیند آموزش از چهار قسمت به عنوان نمونه آموزشی و قسمت دیگر به عنوان نمونه آزمایشی استفاده شد. هر قسمت از نمونه ها در نقش آموزشی و نقش آزمون پنج بار استفاده شد. نتیجه روش اعتبارسنجی متقابل 5 برابری به عنوان برازش الگوریتم PSO استفاده شد.
5. نتایج و بحث
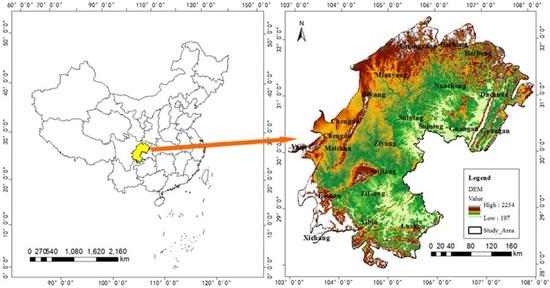
5.1. آموزش مدل
5.2. منحنی مشخصه عملکرد گیرنده
5.3. تراکم نقطه لغزش
6. نتیجه گیری
منابع
- پاول، جی. مفاهیم و دستورالعمل های مدیریت ریسک زمین لغزش. اوست ژئومک. 2000 ، 35 ، 49-92. [ Google Scholar ]
- چن، XL; ران، اچ ال. Qi، SW عوامل محرک حساسیت زمین لغزش های ناشی از زلزله در زلزله 1976 Longling. Acta Sci. نات. دانشگاه Pekinensis 2009 ، 45 ، 104-110. (به زبان چینی) [ Google Scholar ]
- پرادان، ب. تجلی یک مدل منطق فازی پیشرفته همراه با تکنیکهای اطلاعات جغرافیایی برای نگاشت حساسیت زمین لغزش و مقایسه آنها با مدلسازی رگرسیون لجستیک. محیط زیست Ecol. آمار 2011 ، 18 ، 471-493. [ Google Scholar ] [ CrossRef ]
- Wu، XL; نیو، RQ; رن، اف. پنگ، ال. نقشهبرداری حساسیت زمین لغزش با استفاده از مجموعههای خشن و شبکههای عصبی پس انتشار در سه دره، چین. محیط زیست علوم زمین 2013 ، 70 ، 1307-1318. [ Google Scholar ] [ CrossRef ]
- لینگ، پی. نیو، RQ; هوانگ، بی. Wu، XL; ژائو، YN; بله، نقشهبرداری حساسیت زمین لغزش RQ بر اساس نظریه مجموعههای خشن و ماشینهای بردار پشتیبان: موردی از منطقه سه دره، چین. ژئومورفولوژی 2014 ، 204 ، 287-301. [ Google Scholar ]
- ملکیور، سی. ماتئوچی، ام. آزونی، آ. زنچی، ع. شبکههای عصبی مصنوعی و تحلیل خوشهای در پهنهبندی حساسیت زمین لغزش. ژئومورفولوژی 2008 ، 94 ، 379-400. [ Google Scholar ] [ CrossRef ]
- Wu، XL; رن، اف. ارزیابی حساسیت زمین لغزش نیو، RQ با استفاده از واحدهای نگاشت شی، درخت تصمیم، و مدلهای ماشین بردار پشتیبان در سه دره چین. محیط زیست علوم زمین 2014 ، 71 ، 4725-4738. [ Google Scholar ] [ CrossRef ]
- Isik، Y. مقایسه روشهای نگاشت حساسیت زمین لغزش برای Koyulhisar، ترکیه: احتمال شرطی، رگرسیون لجستیک، شبکههای عصبی مصنوعی، و ماشین بردار پشتیبانی. محیط زیست علوم زمین 2010 ، 61 ، 832-836. [ Google Scholar ]
- پورقاسمی، HR; جیرنده، AG; پرادان، بی. چونگ، XU؛ نقشهبرداری حساسیت زمین لغزش با استفاده از ماشین بردار پشتیبان و GIS در استان گلستان، ایران. J. Earth Syst. علمی 2013 ، 122 ، 349-369. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- انعام، یادگیری بیزی پراکنده ME و ماشین بردار ارتباط. جی. ماخ. فرا گرفتن. Res. 2001 ، 1 ، 211-244. [ Google Scholar ]
- Vapnik، VN ماهیت نظریه یادگیری آماری ، ویرایش دوم. Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2000. [ Google Scholar ]
- خطا، AC; انعام، تحلیل ME از یادگیری پراکنده بیزی. در مجموعه مقالات پیشرفتها در سیستمهای پردازش اطلاعات عصبی 14، ونکوور، BC، کانادا، 3 تا 8 دسامبر 2001.
- لیو، ZB; شائو، جی اف. Xu، WY مقایسه تحلیل و پیشبینی جابجایی غیرخطی زمین لغزش با رویکردهای هوش محاسباتی. زمین لغزش 2014 ، 11 ، 889-896. [ Google Scholar ] [ CrossRef ]
- Lin، YL; وانگ، ژ. Xia، KW; ارزیابی حساسیت زمین لغزش منطقهای Li، ZG بر اساس ماشین بردار مربوط. J. Inf. محاسبه کنید. علمی 2015 ، 12 ، 6893-6903. [ Google Scholar ] [ CrossRef ]
- نزدیک تر.؛ ویلسون، جی. گادر، P. یک رویکرد بیزی برای یادگیری چند هسته ای محلی با استفاده از ماشین بردار ارتباط. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور (IGARSS)، ونکوور، بریتیش کلمبیا، کانادا، 24 تا 29 ژوئیه 2011.
- گونن، ام. Ethem، A. الگوریتم های یادگیری چندگانه هسته. جی. ماخ. فرا گرفتن. Res. 2011 ، 12 ، 2211-2268. [ Google Scholar ]
- مهمت، جی. Ethem، A. الگوریتم های محلی سازی شده برای یادگیری چندین هسته. تشخیص الگو 2013 ، 46 ، 798-807. [ Google Scholar ]
- وانگ، مقر; Sun، FC; Cai, YN در مورد روش های یادگیری هسته های متعدد. Acta Autom. گناه 2010 ، 36 ، 1037-1050. [ Google Scholar ] [ CrossRef ]
- لی، دی ایکس؛ وانگ، جی. ژائو، XQ؛ لیو، ی. Wang، DW الگوریتم های یادگیری چند نمونه ای مبتنی بر هسته چندگانه برای طبقه بندی تصاویر. J. Vis. اشتراک. تصویر نشان می دهد. 2014 ، 25 ، 1112-1117. [ Google Scholar ] [ CrossRef ]
- کندی، جی. ابرهارت، آر. بهینه سازی ازدحام ذرات. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد شبکه های عصبی، واشنگتن، دی سی، ایالات متحده، 27 نوامبر تا 1 دسامبر 1995.
- شی، ی. ابرهارت، RC بهینه ساز ازدحام ذرات اصلاح شده. در مجموعه مقالات کنفرانس بین المللی IEEE در محاسبات تکاملی، انکوریج، AK، ایالات متحده آمریکا، 4 تا 9 مه 1998.
- لیانگ، ایکس. لی، دبلیو. ژانگ، ی. ژو، ام. روش بهینهسازی ازدحام ذرات تطبیقی مبتنی بر خوشهبندی. محاسبات نرم. 2015 ، 19 ، 431-448. [ Google Scholar ] [ CrossRef ]
- لی، جی. ژانگ، جی. جیانگ، سی. ژو، بهینه ساز ازدحام ذرات کامپوزیت MC با حافظه تاریخی برای بهینه سازی عملکرد. IEEE Trans. سایبرن. 2015 ، 45 ، 2350-2363. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، جی دی. هو، جی پی. تشخیص نفوذ Xia، KW با استفاده از دستگاه بردار ربط بر اساس بهینهسازی ازدحام ذرات ابری. تصمیمات کنترلی 2015 ، 30 ، 698-702. [ Google Scholar ]
- لیو، QF; بو، HL; Qin، BK بهینه سازی شیر برقی عمل مستقیم بر اساس Cloud PSO. ان هسته انرژی 2013 ، 53 ، 299-308. [ Google Scholar ] [ CrossRef ]
- دوان، کیو. ژائو، جی جی؛ Ma, Y. ماشین بردار مرتبط بر اساس بهینهسازی ازدحام ذرات هستههای ترکیبی در پیشبینی بار الکتریکی. برق ماخ کنترل 2010 ، 14 ، 33-38. (به زبان چینی) [ Google Scholar ]
- فی، SW; سلام.؛ ما، XJ; Miao، YB یک مدل ترکیبی از RVM و PSO برای پیشبینی محتوای گازهای محلول در روغن ترانسفورماتور. پت اخیر برق برق مهندس 2013 ، 6 ، 183-189. [ Google Scholar ] [ CrossRef ]
- فی، SW; او، Y. یک ماشین بردار ربط چند هسته ای با وزن اینرسی کاهنده غیرخطی PSO برای پیش بینی حالت تحمل. شوک ویب. 2015 ، 2015 ، 1-6. [ Google Scholar ] [ CrossRef ]
- ژانگ، CL; او، YG; یوان، LF; دنگ، FM یک رویکرد جدید برای پیش آگهی خطا مدار آنالوگ بر اساس RVM بهبود یافته است. جی الکتر. تست. تئوری کاربردی 2014 ، 30 ، 343-356. [ Google Scholar ] [ CrossRef ]
- آنتوان، اس. ایزابل، م. Van Wesmael، B. پیشبینی کربن آلی خاک با طیفسنجی تصویربرداری هوابرد: مقایسه اعتبار متقاطع و اعتبار. علم خاک Soc. صبح. J. 2012 ، 76 ، 2174-2183. [ Google Scholar ]
- Fushik, T. برآورد خطای پیشبینی با استفاده از اعتبارسنجی متقاطع K-fold. آمار محاسبه کنید. 2011 ، 21 ، 137-146. [ Google Scholar ] [ CrossRef ]
- Milos, M. مقایسه عملکرد مدلهای مختلف حساسیت زمین لغزش در فضای ROC. در مجموعه مقالات علم و عمل زمین لغزش: فهرست زمین لغزش و حساسیت و منطقه بندی خطر، رم، ایتالیا، 3-9 اکتبر 2011.
- بردلی، AP استفاده از ناحیه زیر منحنی ROC در ارزیابی الگوریتمهای یادگیری ماشین. تشخیص الگو 1997 ، 30 ، 1145-1159. [ Google Scholar ] [ CrossRef ]
- جان، م. Jha، VK; نقشهبرداری پهنهبندی حساسیت زمین لغزش راوات، GS و اعتبار سنجی آن در بخشی از گرهوال هیمالایای کوچک هند، با استفاده از تحلیل رگرسیون لجستیک باینری و روش منحنی مشخصه عملکرد گیرنده. زمین لغزش 2009 ، 6 ، 17-26. [ Google Scholar ]
- گوتز، JN; برنینگ، آ. پتچکو، اچ. لئوپولد، پی. ارزیابی تکنیکهای یادگیری ماشین و پیشبینی آماری برای مدلسازی حساسیت زمین لغزش. محاسبه کنید. Geosci. 2015 ، 81 ، 1-11. [ Google Scholar ] [ CrossRef ]
- فراتینی، پ. کروستا، جی. Carrara, A. تکنیک های ارزیابی عملکرد مدل های حساسیت زمین لغزش. مهندس جئول 2010 ، 111 ، 62-72. [ Google Scholar ] [ CrossRef ]
- یو، SH بر روی ویژگیهای مکانی-زمانی جریان گل و سنگ و لغزش زمین در حوضه سیچوان و علت هواشناسی آن تجزیه و تحلیل میکند. فلات Meteorol. 2003 ، 22 ، 83-89. (به زبان چینی) [ Google Scholar ]
- تانگ، ایکس سی; Xie, SY کاوش در علل ژئوتکتونیکی برای تشکیل نظم توزیع لندفرمهای بلای کوهی اطراف حوضه سیچوان. J. حفظ آب خاک. 1994 ، 8 ، 76-84. (به زبان چینی) [ Google Scholar ]
- وانگ، ژ. Hu، ZW; لیو، CQ تجزیه و تحلیل حساسیت عوامل محیطی فاجعه باردار لغزش زمین در منطقه تپه ای در سیچوان بر اساس نظریه فراکتال ابعاد متغیر. محیط زمین. 2013 ، 41 ، 680-687. (به زبان چینی) [ Google Scholar ]
- وانگ، ژ. Hu، ZW; ژائو، WJ; گونگ، HL؛ دنگ، JX تجزیه و تحلیل حساسیت عوامل محیطی باردار فاجعه زمین لغزش ناشی از بارش بر اساس مدل احتمال عامل قطعیت – در نظر گرفتن منطقه تپه ای در سیچوان به عنوان مثال. جی فاجعه. 2014 ، 29 ، 109-115. (به زبان چینی) [ Google Scholar ]
- Zhang, SY اساس پیش بینی آب و هوا بلایای زمین شناسی ; مطبوعات هواشناسی چین: پکن، چین، 2009. (به زبان چینی) [ Google Scholar ]
- Huang, Q. در مورد جلوگیری از لغزش در کوه های کم ارتفاع و تپه های کشور در استان جیانگشی. جی. جیانگشی هنجار. دانشگاه 1992 ، 2 ، 161-166. (به زبان چینی) [ Google Scholar ]



© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر