1. معرفی
مصب ها محیط های خاصی را نشان می دهند که آب های شور قاره ای و شیرین را با هم مخلوط می کنند و با تنوع زیستی غنی و خدمات زیست محیطی مرتبط هستند. علاوه بر این، آنها مکان های مطلوب برای توسعه اجتماعی و اقتصادی هستند. سیستمهای دهانه رودخانه پیچیده هستند و از نواحی مختلف به هم پیوسته تشکیل شدهاند، که معمولاً شامل یک کانال اصلی، کرانههای دلتای جزر و مدی و گل و لای جانبی میشود. گل و لای جزر و مدی یکی از ویژگی های کلیدی در اکوسیستم پیچیده رودخانه است. سواحل رسوبات جانبی و مختلط (رس، سیلت، ماسه) کانال اصلی، که به طور متوالی توسط جزر و مد و/یا تغییرات دبی رودخانه پوشیده شده و پرآب می شوند، نقش مهمی در دینامیک رسوب مصب به عنوان منبع رسوب یا فرورفتگی موقت دارند (مثلاً ، [ 1 ، 2]). لجنزارها رابط بین دشت سیلابی و کانال اصلی رودخانه هستند و با یک شیب متقاطع (شیب یا صاف) مشخص می شوند که معمولاً به دو محیط خاص تقسیم می شوند: ساحل که در قسمت بالایی دشت گل و لای قرار دارد و سیلابی است. در طول جزر و مد بهار؛ و صفحه جزر و مدی، قسمت پایینی پهنه گلی، با حد بالایی که مربوط به بالاترین سطح دریا است که در طول میانگین دامنه جزر و مد به دست آمده است. سواحل عمدتاً با پوشش گیاهی هالوفیل (محمل به نمک) مستعمره می شوند، در صورتی که پوشش گیاهی وجود داشته باشد، در حالی که تخت جزر و مدی می تواند یا برهنه باشد یا توسط پوشش گیاهی در قسمت بالایی خود در هنگام گذار به ساحل مستعمره شود. خط الراس/روانل و نهرهای جزر و مدی پرپیچ و خم عمود بر کانال اصلی نیز یکی از ویژگی های معمولی فلات های جزر و مدی هستند. به عنوان مسیرهای تبادل ترجیحی برای رسوبات و آب بین دشت سیلابی، ساحل، تخت جزر و مد و کانال اصلی شناسایی شده است. شرایط هیدرودینامیکی (جریانها، تنش برشی بستر) در تمام قسمتهای سیستم بر توسعه پوشش گیاهی تأثیر میگذارد، اما برعکس، وجود پوشش گیاهی میتواند بر هیدرودینامیک نیز تأثیر بگذارد (به عنوان مثال، کاهش سرعت جریان، کاهش تلاطم.3 ])، منجر به تغییرات در دینامیک رسوب (به عنوان مثال، فرسایش / رسوب [ 4 ، 5 ]).
عوامل هیدرولوژیکی (تخلیه رودخانه و ورودیهای جامد معلق قاره)، هواشناسی (باد، موج) و هیدرودینامیکی (جندر) دینامیک رسوبات دهانه رودخانه و بنابراین مورفودینامیک گل و لای را در مقیاسهای زمانی مختلف کنترل میکنند: از ساعتها (جندرو مد)، روز (رویدادهای طوفانی). چرخههای دو هفتهای (نیاپ/ جزر و مد) و فصول (تخلیه رودخانهها) تا دههها (تغییر در کاربری زمین، تغییر جریانهای انسانی) و قرنها (تغییر آب و هوا). تغییرات مورفولوژیکی با رویدادهای فرسایش / رسوب منجر به تغییرات ارتفاعی بستر گل و لای، یا توسعه نهر جزر و مدی و/یا مهاجرت همراه است. اجبار جزر و مد و طوفان ها منجر به تغییرات میلی متر تا سانتی متر در ارتفاع بستر [ 6 ] و تشکیل فرم های بستر می شود ( به عنوان مثال، امواج). تغییراتی که در مقیاسهای زمانی متوسط رخ میدهند با تغییرات سانتیمتر به دسیمتر مرتبط هستند، در حالی که تغییرات آهسته و طولانیمدت به طور بالقوه با عقبنشینی یا افزایش سطح گل و لای، یعنی تغییرات دسیمتر به متر مرتبط است. این تغییرات به طور کلی به طور همگن در سراسر گل و لای اعمال نمی شوند، اما با تنوع فضایی قوی بیان می شوند. در نهایت، فرآیندهای فیزیکی فوق الذکر که مورفودینامیک گل و لای را هدایت می کنند، به طور مستقیم با پوشش گیاهی زمین تعامل دارند.
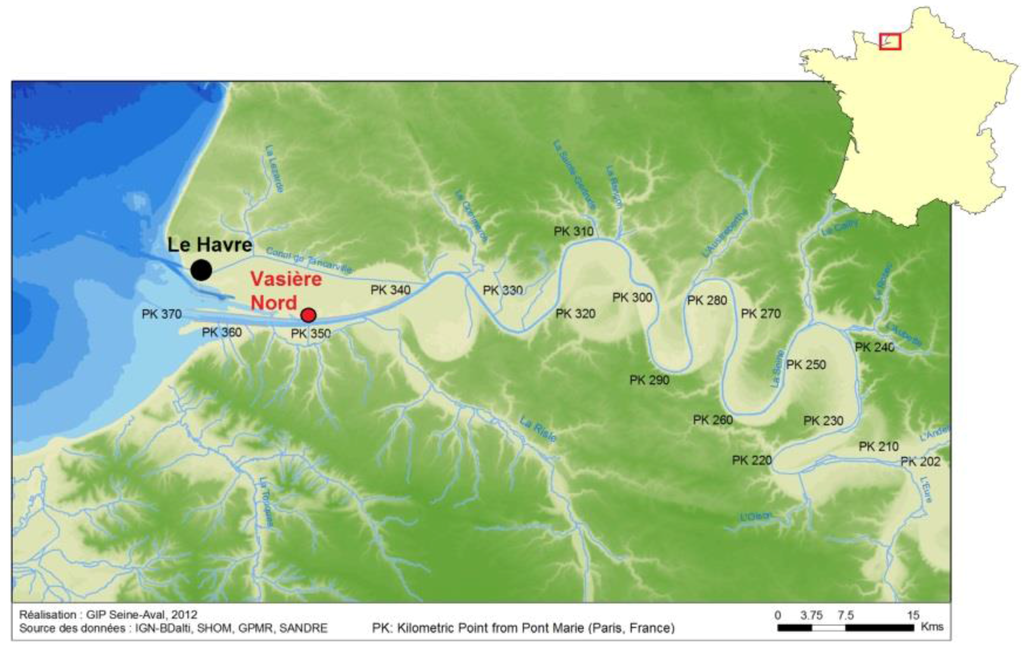
با انعکاس چنین محیط پیچیده ای، خور ماکروتیدال سن (حداکثر دامنه جزر و مدی 8.0 متر در دهانه آن) در قسمت شمال غربی فرانسه واقع شده است ( شکل 1 ). این یکی از بزرگترین مصب ها در فلات قاره شمال غربی اروپا است که حوضه آبریز آن بیش از 79000 کیلومتر مربع است . میانگین جریان سالانه رودخانه سن که در 50 سال گذشته محاسبه شده است، 450 متر مکعب در ثانیه -1 است . در طول دو قرن گذشته، خور سن به طور گسترده توسط فعالیت های انسانی تغییر کرده است [ 7 ]. در نتیجه، رودخانه سن پایین از یک سیستم غالب طبیعی به یک سیستم کنترل شده از نظر انسانی تغییر یافت [ 8]]. علیرغم ماهیت بسیار پویا سیستم، مناطق جزر و مدی و باتلاق های نمکی هنوز در خور پایین توسعه یافته اند. با این حال، سطح بین جزر و مدی در طول 30 سال گذشته به شدت کاهش یافته است. مصب قیفی شکل در معرض بادهای غالب SSW قرار می گیرد، به طوری که مناطق جزر و مدی در دهان تحت تأثیر ترکیبی امواج و جریان ها در معرض فرسایش قرار می گیرند [ 2 ]. خور پایین با کدورت مشخصی مشخص می شود [ 7 ]، که کنترل واضحی بر روی الگوهای ته نشینی در گل و لای جزر و مدی در دهانه خور دارد.
در خور سن، در میان دیگران، نظارت بر مورفودینامیک گل و لای در مقیاس های زمانی مختلف برای دهه ها توسعه یافته است. ابتدایی ترین روش اندازه گیری دستی ارتفاع میله است که شامل قرار دادن یک تیر در زمین در طول یک دوره معین و اندازه گیری منظم (مثلاً هر روز، هفته یا ماه) تغییرات سطح بستر در پایه تیرک است. این یک روش نقطه ای و فرکانس پایین را نشان می دهد که با دقت سانتی متری همراه است، که برای تعیین کمیت برافزایش یا فرسایش استفاده شده است. طی 20 سال گذشته، ارتفاع سنجهای صوتی مستقل برای نظارت بر تغییرات ارتفاع بستر با وضوح بالا (زیر میلیمتری) و فرکانس بالا (به ترتیب 1 هرتز) در دورههای طولانی (سال) توسعه داده شدند [9 ، 10 ]]. با این حال، منطقه بررسی محلی است و اندازهگیریها لزوماً نمایانگر تغییرات مورفولوژیکی کل فلت گلی نیستند، بنابراین منجر به عدم قطعیتهای بزرگ هنگام ارزیابی بودجههای رسوب میشود. اخیراً، بررسی های LIDAR در هوا برای ارائه توپوگرافی گل و لای در مناطق وسیع (در حد 1 تا 10 کیلومتر مربع ) مورد استفاده قرار گرفته است. با این حال، با وضوح عمودی از ترتیب دسیمتریک، فواصل برگشت بررسی نادر، و هزینه استقرار بالای آنها، بررسیهای هوایی LiDAR تنها به ما اجازه میدهند تا تغییرات مورفولوژیکی بلندمدت را ثبت کنیم. اسکن لیزری زمینی (TLS) یک جایگزین ممکن است [ 11 ، 12]، حتی اگر پوشش زمین از نظر فضایی در اطراف TLS محدود است و وجود آب باقیمانده سطحی یک محدودیت اصلی است که از پراکندگی نور ساطع شده جلوگیری می کند، بنابراین به طور بالقوه مناطق بزرگی را در بررسی های TLS پوشانده است. در نتیجه، یک شکاف روش شناختی برای نظارت بر تکامل مورفودینامیک گل و لای فضایی سریع و متوسط وجود دارد که می تواند با بررسی های فتوگرامتری از وسایل نقلیه هوایی بدون سرنشین (پهپادها) پل شود.
در یک زمینه گسترده تر، همانطور که در بررسی های اخیر در مورد این موضوع ذکر شد [ 13 ، 14 ]، رویکردهای سنجش از دور با استفاده از پهپادها در حوزه های تحقیقاتی و عملیاتی مختلفی مانند ژئوماتیک، ناوبری، نقشه برداری، مهندسی، رباتیک و پردازش داده ها. طیف گستردهای از پلتفرمها اکنون در دسترس هستند که امکانات متفاوتی را از نظر بار محموله و استقلال زمان پرواز ارائه میدهند. به لطف کوچکسازی حسگرها و الکترونیک داخلی برای سیستمهای ثبت و کنترل دادهها، تعداد فزایندهای از انواع حسگرها (مانند دوربین نوری، LiDAR، دوربین ابرطیفی) میتوانند از یک پهپاد کار کنند و امکانات گستردهای برای بهرهبرداری کامل از کل طیف الکترومغناطیسی برای اهداف سنجش از دور [ 14]. بررسی های فتوگرامتری از پهپادها به ویژه برای نظارت بر محیط زیست، در مناطق کوهستانی [ 15 ]، کشاورزی [ 16 ]، رودخانه ها و مناطق ساحلی [ 17 ، 18 ، 19] مفید است.]. پهپادها میتوانند در فرکانسهای زمانی بالاتری نسبت به فتوگرامتری هوابرد یا سیستمهای LIDAR توپوگرافی هوابرد، بررسیها را انجام دهند. همچنین در استفاده از آنها انعطاف پذیرتر و قابلیت مانور بیشتری دارند. از آنجایی که آنها مشمول مقررات مشابهی نیستند، می توان آنها را در ارتفاع کم پرواز کرد، که برای بهبود وضوح و دقت داده ها بسیار مهم است. با پیشرفتهای اخیر در پهپادهای کوچک و استفاده از الگوریتمهای Structure from Motion (SfM)، دستیابی سریع دادههای توپوگرافی با وضوح مکانی و زمانی بالا اکنون با هزینه کم امکانپذیر است [19 ، 20 ، 21 ، 22 ] . رویکرد SfM بر اساس روش ثبت تصویر به تصویر SIFT (تبدیل ویژگی تغییرناپذیر مقیاس) است [ 23 ، 24]]. در مقایسه با فتوگرامتری دیجیتال کلاسیک، گردش کار SfM امکان اتوماسیون بیشتری را فراهم می کند و بنابراین برای کاربران ساده تر است [ 21 ، 23 ].
بررسی های پهپاد قبلاً در بالای مناطق مسطح گلی برای به دست آوردن تصاویر انجام شده است [ 25 ، 26 ، 27 ، 28 ]، اما به ندرت برای اهداف فتوگرامتری [ 29]]. بررسی های فتوگرامتری پهپاد در مناطق گل و لای چالش برانگیز است. گل و لای مناطقی هستند که دسترسی به زمین دشوار است، که برای بررسی های توپوگرافی و همچنین برای استقرار و بررسی نقاط کنترل زمینی (GCPs) برای بررسی های پهپاد مشکل ساز است. علاوه بر این، مدت زمان موجود برای عملیات بررسی توسط دوره های جزر و مد کنترل می شود. مشکل دیگر مربوط به خود روش استریو فتوگرامتری است. گل و لای به طور کلی با رسوبات سطحی با محتوای آب بالا و حتی گودال ها و لایه های آب جزر و مدی باقی مانده مشخص می شود. در چنین محیطهایی، روش بازیابی استریو به دلیل مشکلات همبستگی تصویر به دلیل الگوی بافتی کم یا اثرات درخشش خورشید، عموماً به محدودیتهای خود میرسد.
هدف این مطالعه نشان دادن پتانسیل و محدودیتهای عکسبرداری هوایی با وضوح بالا و استریو از یک پهپاد سبک بر روی زمینهای گلی است. نتایج در رابطه با مقیاسهای مورفولوژیکی مختلف که دینامیک مسطح گلی را مشخص میکنند، تفسیر میشوند. در نهایت، این نتایج از نظر کیفیت محصولات تصویری حاصل، استفادههای احتمالی برای نظارت بر گل و لای، و پیشرفتهای روششناختی آینده مورد بحث قرار میگیرند.
2. منطقه مطالعه
این مطالعه در پروژه Seine-Aval HYMOSED (مدلسازی عملکرد هیدرومورفو- رسوبی خور سن)، با تمرکز بر روی گلالری «Vasière Nord»، بزرگترین تخته گلی در خور سن (3.2 کیلومتر مربع) انجام شده است . ، در قسمت شمالی دهانه مصب قرار دارد ( شکل 1 ). جریان رودخانه سن از 100 m 3 · s -1 تا 2000 m 3 ·s – 1 در 20 سال گذشته، با میانگین دبی سالانه حدود 500 m 3 ·s -1 متغیر بود.. مطالعات قبلی نشان می دهد که رسوب به صورت انفجاری در طول دوره های تخلیه رودخانه کم رخ می دهد و ارتباط نزدیکی با بالاترین جزر و مد بهار و وجود منطقه حداکثر کدورت در دهانه خور دارد [2 ] . این رسوبات تحت سلطه رسوبات ریز (<50 میکرومتر)، که 70٪ – 90٪ از مواد را نشان می دهد. همانطور که در گل و لای رودخانه بالادست، رویدادهای فرسایش چندین سانتی متری مشاهده می شود که عمدتاً پس از دوره های رسوب گذاری [ 30 ] است.
در طول بازه زمانی مطالعه، سه ارتفاع سنج ALTUS [ 9 ] بر روی پهنه گلی Vasière Nord در امتداد یک ترانسکت عمود بر کانال اصلی مستقر شدند. ALTUS اندازه گیری ارتفاع بستر را با وضوح زیر میلی متری و فرکانس نمونه برداری هر چهار دقیقه یک بار بین آوریل 2014 و اکتبر 2015 ارائه کرد. یکی در بخش مرکزی (“مسطح”) و یکی در یا نزدیک شیب شکسته. این توزیع برای ثبت فرآیندهای متمایز است، زیرا بخشهای تخت جزر و مدی ممکن است رفتار متفاوتی داشته باشند، هم در سطح جهانی ( یعنیدر مقیاس فصلی: فرسایش/رسوب بسته به قدرت جریان در لحظات مختلف چرخه جزر و مد، بنابراین با عمق های مختلف ستون آب پوشاننده) و در مقیاس های زمانی کوتاه (زیرا زمان غوطه وری آنها نسبت به دامنه جزر و مدی متفاوت است).
3. مواد و روشها
3.1. روش پردازش داده ها
روش استخراج ارتفتوگرافی و DEM بر اساس گردش کار SfM برای استریوفتوگرامتری Multiview است. الگوریتم SfM پیاده سازی شده توسط PhotoScan® برای بازسازی سطح سه بعدی به چهار مرحله اصلی تقسیم می شود [ 22 ، 31 ]:
- من)
-
تراز دوربین با تنظیم بسته. نقاط کراوات مشترک در عکسهای همپوشانی شناسایی و مطابقت داده میشوند تا پارامترهای دوربین خارجی (موقعیت و جهت) برای هر عکس محاسبه شود و پارامترهای کالیبراسیون دوربین اصلاح شود.
- ii)
-
از موقعیت های تخمینی دوربین و خود تصاویر، معادلات استریوفتوگرامتری به نرم افزار اجازه می دهد تا موقعیت هر نقطه اتصال را محاسبه کند تا یک ابر نقطه متراکم بسازد.
- III)
-
سپس یک شبکه چند ضلعی سه بعدی به عنوان نمایشی از سطح جسم بر اساس ابر نقطه متراکم ساخته می شود.
- iv)
-
مش بازسازی شده را می توان بافت کرد و از آن برای تولید یک عکس ارتوگرافی استفاده کرد. DEM با درون یابی مش چند ضلعی نامنظم بر روی یک شبکه منظم محاسبه می شود.
ارتفتوگراف موزاییکی از عکس های هوایی است که به صورت هندسی برای اعوجاج لنز و جلوه های تسکین زمین تصحیح شده است. عکسهای ارتفوگرافی در سراسر مقیاس یکسان هستند و میتوان از آنها به عنوان نقشه استفاده کرد. یک DEM به طور کلی به یک نمایش مبتنی بر شبکه از توپوگرافی اشاره دارد که با درونیابی نقاط توپوگرافی در یک شبکه منظم ساخته شده است. به طور دقیق تر، یک مدل سطح دیجیتال (DSM) ارتفاعات زمین و تمام ویژگی های روی آن (به عنوان مثال، ساختمان ها، پوشش گیاهی) را نشان می دهد، در حالی که یک مدل دیجیتالی زمین (DTM) یک نمایش زمین برهنه است [32 ] . این مطالعه بر روی DSM ها متمرکز است، همانطور که به طور مستقیم توسط PhotoScan ® محاسبه شده است. با این وجود، می توان متوجه شد که DSM و DTM در بخش اصلی منطقه مورد مطالعه مترادف هستند. در متن زیر، اصطلاحات DSM و DEM به جای یکدیگر استفاده خواهند شد.
پس از ساخت، DEM و ارتفتوگرافی به یک سیستم مختصات مرجع صادر می شوند (در اینجا، RGF93-Lambert 93).
تفاضل DEM شامل تفریق دو DEM دیاکرونیک به منظور محاسبه DEM تفاوت (DoD) است، به عنوان مثال ، یک شبکه تغییر ارتفاع که بین دو تاریخ اکتساب رخ داده است. در مورد ما، DSM ها با استفاده از نرم افزار ESRI ArcGIS کم می شوند .
3.2. مشخصات فنی خرید پهپاد
این بررسی توسط یک پلت فرم هگزاکوپتر DS6، ارائه شده توسط DroneSys، به نام DRELIO انجام می شود ( شکل 2 a). این پهپاد برقی مولتی روتور دارای قطر 0.8 متر است و به یک قاب جمع شونده مجهز شده است که به پهپاد اجازه می دهد تا برای حمل و نقل آسان به عقب باز شود. DS6 کمتر از 4 کیلوگرم وزن دارد و می تواند بار 1.6 کیلوگرمی را تحمل کند. برای اطمینان از فرود نرم در صورت بروز مشکلات فنی، مجهز به سیستم نجات چتر نجات است. اگرچه DRELIO قادر به انجام پرواز، برخاست و فرود مستقل است، اما از نرم افزار ایستگاه زمینی برای کنترل پهپاد در طول پرواز استفاده می شود.
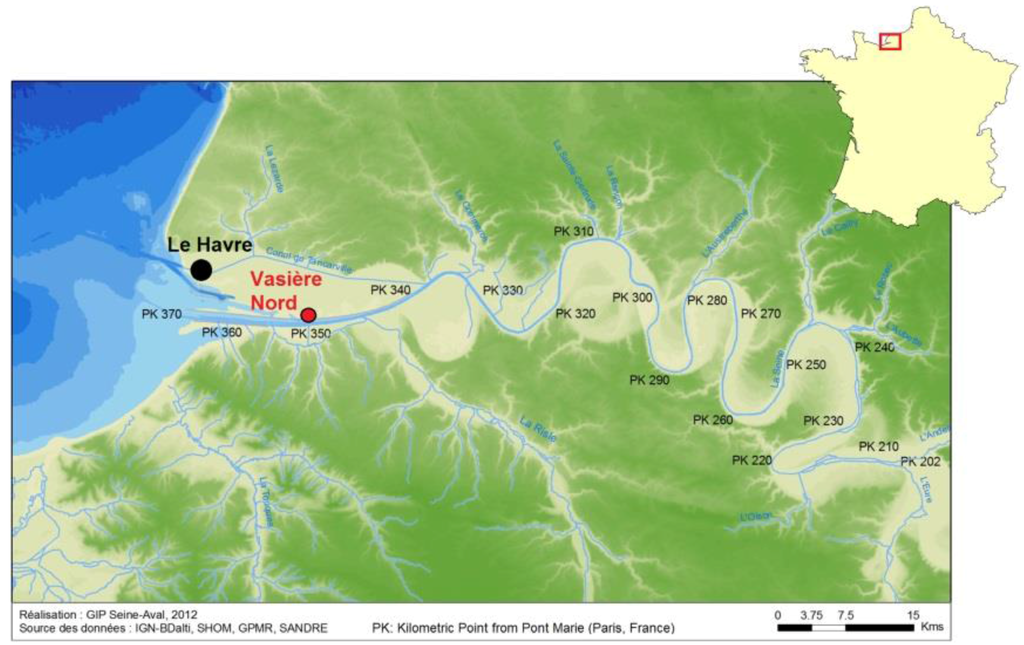
برای جلوگیری از اثرات درخشش خورشید در سطح رسوبات اشباع شده از آب، از جمله بر روی گودالها و لایههای آب جزر و مدی باقیمانده، پروازها ترجیحاً در هوای ابری و در اوایل صبح یا اواخر عصر، در صورت سازگاری با جزر و مد انجام میشدند. خودمختاری پرواز DRELIO 10 حدود 20 دقیقه است. این دوربین برای عکاسی نادر با دوربین رفلکس دیجیتال Nikon D700 با فاصله کانونی ثابت 35 میلی متر مجهز شده است که در هر ثانیه یک عکس 12 مگاپیکسلی در حالت فاصله سنج می گیرد. سیستم کنترل پرواز داخل هواپیما از یک GPS و یک خلبان خودکار تشکیل شده است. کنترل پرواز توسط نرم افزار DJI® iOSD® اجرا می شود . برد عملیات می تواند تا 1 کیلومتر افزایش یابد. سرعت معمولی پهپاد 3 m·s -1 استبه منظور تضمین حداقل همپوشانی 60 درصدی بین تصاویر متوالی ( شکل 3 ) در ارتفاع 100 متری. پس از پرواز، تصاویر جمع آوری شده از دوربین به کامپیوتر منتقل می شوند تا پردازش شوند.
محدودیت بار اجازه نمی دهد پهپاد به تجهیزات ناوبری و موقعیت یابی دقیق مجهز شود. در نتیجه، نقاط کنترل زمینی (GCPs) برای ثبت نتایج در یک سیستم مختصات مرجع (در اینجا، RGF93 Lambert 93 که سیستم مرجع رسمی در فرانسه است) مورد نیاز است. GCPها شامل اهداف بسیار قابل مشاهده هستند که در منطقه بررسی توزیع شده اند ( شکل 2ب). این اهداف دیسک های قرمز رنگ به قطر 30 سانتی متر هستند. آنها با استفاده از یک گیرنده Topcon HiPer II GNSS توسط یک GPS دیفرانسیل پس پردازش شده ارجاع داده می شوند. میانگین دقت نظرسنجی دیفرانسیل GPS (DGPS) به صورت افقی 3 سانتی متر و عمودی 4 سانتی متر است. قرار دادن GCP ها و اندازه گیری موقعیت آنها یک مرحله بسیار وقت گیر از نظرسنجی است، به ویژه در مناطق گل و لای که دسترسی با پای پیاده چالش برانگیز است و گاهی اوقات توسط کانال های صعب العبور محدود می شود (به عنوان مثال، پنجره زمانی برای راه اندازی، اندازه گیری با DGPS و انتخاب بالاتر از 23 هدف برای نظرسنجی در سپتامبر 2015 حدود 2 ساعت بود). برای اهداف بازده زمانی با توجه به محدودیت جزر و مد، اهداف ترجیحاً در اطراف سایتهای ALTUS قرار میگرفتند ( شکل 4)الف) به منظور تضمین دقت بالا در حوزه اصلی مورد علاقه. GCPها در AgiSoft® PhotoScan Professional (نسخه 1.1.5) وارد می شوند تا عکس های ارتو و DSM را محاسبه کنند.
3.3. جمع آوری داده های نظرسنجی میدانی
برای این مطالعه، سه بررسی انجام شد: اولی در 12 سپتامبر 2014 (دبی کم رودخانه)، دومی در 11 مارس 2015 (یک ماه پس از دوره اوج سیل)، و آخرین مورد در 2 سپتامبر 2015 (بازگشت). به شرایط کم دبی رودخانه). میز 1پارامترهای کلیدی هر نظرسنجی را خلاصه می کند. این پروازها در ارتفاع حدود 100 متری برای دستیابی به بهترین مصالحه بین وضوح فضایی و پوشش زمین انجام شد. از این رو، این پیکربندی وضوح فضایی حدود 2 سانتی متر بر پیکسل را ارائه می دهد و یک پرواز برای پوشش کل منطقه مطالعه کافی است. هر عکس مساحتی به اندازه 67 متر × 45 متر روی زمین را پوشش می دهد. ارتفاع پرواز بر پوشش زمین و وضوح فضایی تصاویر تأثیر می گذارد. با این حال، دقت نتایج نیز توسط دقت GPS دیفرانسیل در هنگام اندازهگیری GCP محدود میشود. علاوه بر این، پرواز در ارتفاعات پایین تر وضوح بهتری را به همراه خواهد داشت اما پوشش زمین را کاهش می دهد. با توجه به تنظیم intervelometer ما، کاهش پوشش زمین باعث کاهش همپوشانی تصویر می شود، مرحله ای که در فرآیند استریو استریو ضروری است.
به عنوان مثال، در طی بررسی انجام شده در سپتامبر 2015، 250 عکس در طول پرواز جمع آوری شد. از میان این عکس ها، 99 عکس برای پردازش استریو استریو انتخاب شدند ( شکل 3 ). عکسهای بهدستآمده در هنگام برخاستن و فرود، عکسهای تار و آنهایی که تصاویر دیگر را کپی میکردند را حذف کردیم. قبل از پرواز پهپاد، 23 هدف قرمز رنگ قرار داده شد و توسط DGPS اندازه گیری شد ( شکل 4 ). 15 مورد از آنها به عنوان GCP و هشت مورد از آنها به عنوان مرجع زمینی (GR) برای ارزیابی کیفیت DSM محاسبهشده و ارتوفوتو استفاده شد.
4. نتایج
4.1. ارتفتوگراف و مدل رقومی ارتفاع
برای هر بررسی، یک عکس ارتوگرافی و یک DEM با فتوگرامتری SfM محاسبه میشود که نمایش سطحی از منطقه مورد مطالعه را ارائه میکند (مثالی برای سپتامبر 2015 در شکل 4 ). کیفیت نتایج در جدول 2 خلاصه شده است . دقت افقی و عمودی عمدتاً توسط دقت موقعیت یابی DGPS GCP ها تعیین می شود. دقت با استفاده از مجموعه اهداف GR (که با نقاط آبی در شکل 4 نشان داده شده است ) ارزیابی می شود. خطاهای ریشه افقی و عمودی میانگین مربعات (RMSE) برای هر بررسی در جدول 2 خلاصه شده است . این خطاها به اندازه عدم قطعیت در اندازهگیریهای DGPS هستند.
با در نظر گرفتن پیکربندی پرواز (دوربین اشاره گر نادر، خطوط پرواز موازی، ارتفاع پرواز ثابت)، DEM های مشتق شده احتمالاً تغییر شکل های گسترده ای را نشان می دهند [ 21 ، 33 ]. این مصنوعات با گنجاندن GCP در مرحله تنظیم بستهای از گردش کار SfM [ 31 ] کاهش مییابد. با این وجود، از آنجایی که GCPها در بخش مرکزی منطقه متمرکز شدهاند، احتمالاً خطاهای سیستماتیک در بخشهای شرقی و غربی، جایی که GCP وجود ندارد، باقی میماند.
4.2. بررسی روند کلی تکامل منطقه: وزارت دفاع و بودجه های حجمی
اکتسابهای مکرر DEMهای با وضوح بالا، نقشهبرداری و نظارت بر فرسایش و رسوب، محاسبه تغییرات حجمی در طول زمان، و ارزیابی بودجههای رسوب را ممکن میسازد [ 34 ، 35 ]. با کم کردن DEM قبلی از DEM بعدی، DoD های تولید شده در اینجا فرسایش را به عنوان مقادیر منفی و افزایش را به عنوان مقادیر مثبت نشان می دهند.
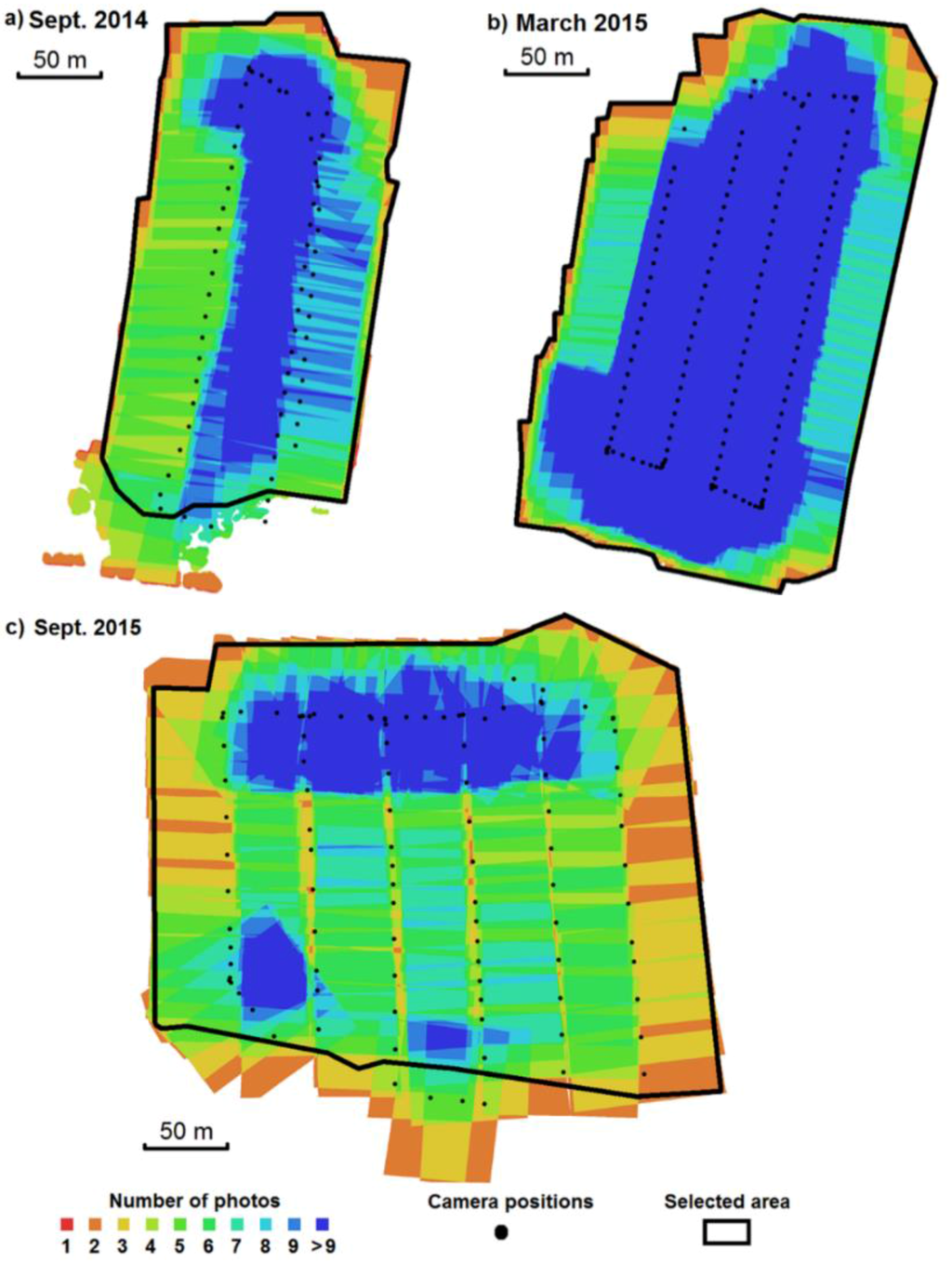
DEM سپتامبر 2014 از DEM مارس 2015 کم می شود و DEM مارس 2015 از DEM سپتامبر 2015 کم می شود . . نهر جزر و مدی واقع در قسمت غربی منطقه مورد مطالعه به نظر می رسد که به دلیل بازآرایی پر پیچ و خم بسیار متحرک باشد. گام زمانی بین دو بررسی به ما اجازه نمی دهد تا تعیین کنیم که آیا مقیاس زمانی این بازآرایی چندین ماه است یا یک چرخه جزر و مدی. وزارت دفاع بین مارس 2015 و سپتامبر 2015 همچنین نشان می دهد که نهر جزر و مدی در قسمت شمالی منطقه در حال فرو ریختن است.
برای در نظر گرفتن تأثیر عدم قطعیت های DEM بر روی DoD ها، ما روش رایج تعیین آستانه سطح تشخیص (LoD) را اتخاذ می کنیم [ 36 ، 37 ]. خطاهای فردی در DEM به صورت زیر در وزارت دفاع منتشر می شود:
جایی که δتوD o D�تو���عدم قطعیت منتشر شده در وزارت دفاع است و δzمنتی 1��منتی 1و δzمنتی 2��منتی 2خطاهای فردی در DEM ها هستند که برای محاسبه DoD استفاده می شوند [ 34 ]. برای این مطالعه، LoD با استفاده از RMSE در هر DEM محاسبه می شود. بر اساس معادله (1)، عدم قطعیت در وزارت دفاع بین سپتامبر 2014 و مارس 2015 و بین مارس 2015 و سپتامبر 2015 به ترتیب عبارتند از: δتوD oDs e p t 2014 – m a r 2015=�تو���سهپتی2014–مترآ�2015=4.7 سانتی متر و δتوD oDm a r 2015 – s e p t 2015=�تو���مترآ�2015–سهپتی2015=4.4 سانتی متر
در حالی که محصولات تصویری در واقع در سطح وضوح مورد نیاز قابل بهره برداری هستند، وزارت دفاع مصنوعات را نشان می دهد (به ویژه در قسمت غربی هر دو وزارت دفاع در شکل 5 و در گوشه سمت راست بالای وزارت دفاع بین مارس 2015 و سپتامبر 2015 ظاهر می شوند). این مصنوعات تایید میکنند که RMSEهای DEMs در قسمتهای خارجی منطقه مورد مطالعه بالاتر هستند، احتمالاً به دلیل کالیبراسیون خودکار نامطلوب در طول مرحله تنظیم بستهای.
برای اهداف تصویری، تعادل مواد کمی در مقیاس محل مطالعه در یک منطقه مرجع مشترک برای همه بررسی ها محاسبه می شود ( شکل 6 ). یک نوار متقاطع تعریف شد و حجم های فرسایش یافته یا افزایش یافته از وزارت دفاع بین سپتامبر 2014 و مارس 2015 و بین مارس 2015 و سپتامبر 2015 محاسبه شد. نتایج در جدول 3 ارائه شده است . علیرغم سطوح بالای عدم قطعیت، این نتایج یک روند کلی را نشان می دهد: رسوب گذاری بین سپتامبر 2014 و مارس 2015 و تمیز کردن بین مارس 2015 و سپتامبر 2015.
دقت بسیار بالا ضروری است به طوری که “نویز”، بزرگی خطای منتشر شده در طول تفاضل DEM [ 35 ، 38 ]، از “سیگنال”، بزرگی تغییرات عمودی بین اکتساب های دیاکرونیک تجاوز نکند. همانطور که در [ 39 ] ذکر شد، به دلیل تفکیک زمانی درشت، تاریخ هر بررسی محدودیت هایی را برای دوره ای که در طی آن تغییرات رخ می دهد تعیین می کند، اما زمان دقیق یا عوامل تغییر را مشخص نمی کند.
4.3. ارتفاع سنجی نقطه ای گسترده در مقابل: مقایسه با اندازه گیری های ALTUS
همانطور که در بخش 2 ذکر شد، ارتفاع سنجهای ALTUS اندازهگیری ارتفاع بستر را به صورت نقطهای با وضوح زیر میلیمتری و فرکانس نمونهبرداری یک اندازهگیری در هر 4 دقیقه ارائه میکنند. سه ALTUS در امتداد یک ترانسکت از بالای سطح جزر و مدی تا شکاف شیب قرار دارند. گستره فضایی اطلاعات ارتفاع سنجی امکانات جدیدی برای مطالعه دینامیک گل و لای ارائه می دهد. هدف این بخش نشان دادن مقایسه بین اندازه گیری های نقطه ای ALTUS و داده های فضایی است. برای مثال، ما تغییرات ∆z در ارتفاع بستر اندازهگیری شده توسط ALTUS واقع در شمال منطقه مورد مطالعه را با تغییرات بهدستآمده از DoDs استریو استریو مقایسه کردیم.
برای دوره مورد مطالعه، ALTUS فرسایش 2.3 سانتی متری را بین سپتامبر 2014 و مارس 2015 و افزایش 6.0 سانتی متری بین مارس 2015 و سپتامبر 2015 اندازه گیری کرد. حلقه هایی با شعاع های مربوطه 2 متر، 5 متر و 10 متر استخراج شده اند. DoDs ( شکل 7 ). از آنجایی که ALTUS در عکس های هوایی قابل مشاهده است، در DEM بازسازی شده است و می تواند بر مقایسه تأثیر بگذارد. بنابراین، یک دیسک با شعاع 1 متر از تجزیه و تحلیل حذف شد (از این رو انتخاب حلقه برای سطح مرجع). میانگین تغییرات ارتفاع Δz در سطح مرجع برای هر وزارت دفاع محاسبه می شود. نتایج مقایسه در جدول 4 ارائه شده است .
بودجههای بهدستآمده از DoDهای استریو استریو کمتر از LoD به نظر میرسد. با این وجود، با میانگینگیری بیش از حلقههای اندازه متریک، «نویز» محلی (خطای تصادفی) تا حدی حذف میشود و خطای باقیمانده عمدتاً به دلیل یک سوگیری منسجم در مقایسه با اندازهگیری ALTUS است. به عبارت دیگر، خطا عمدتاً به دلیل دقت است تا دقت، و مقادیر نسبی بودجه ها همچنان قابل بهره برداری است.
هر دو بودجه ALTUS و وزارت دفاع یک گرایش فصلی را نشان می دهند، با فرسایش بین سپتامبر 2014 و مارس 2015 و واریز بین مارس 2015 تا سپتامبر 2015. دوره زمستانی و افزایش ارتفاع بستر در طول دوره تابستان در مقایسه با اندازهگیریهای ALTUS را دستکم گرفت. این نشان می دهد که ALTUS ممکن است به عنوان یک تله رسوب عمل کند. تکامل میانگین تغییرات ارتفاعی هنگام تغییر سطح مرجع (اندازه حلقه) به دلیل تغییر فضایی در منطقه در نظر گرفته شده (بافت، شیب متوسط، لکه های پوشش گیاهی و غیره) است .). آزمایش مقایسه ای مشابه در مناطق دیگر احتمالاً با افزایش اندازه حلقه به دلیل تنوع فضایی، به عنوان مثال با وجود شکاف شیب یا نهرهای جزر و مدی، تفاوت های مهم تری را به همراه خواهد داشت. تفاوت بین اندازهگیری ALTUS و بازیابی استریو DoD نیز از این تنوع فضایی ناشی میشود، که نمیتواند توسط ALTUS در نظر گرفته شود، و همچنین از عدم قطعیت در محصولات استریو استریو (که از همان ترتیب پس از پردازش است. دقت RTK GPS، یعنی 3 سانتی متر افقی و 4 سانتی متر به صورت عمودی).
4.4. بررسی نهرهای جزر و مدی
از آنجایی که استریوفتوگرامتری پهپاد امکان یک رویکرد چند مقیاسی را فراهم می کند، ساختارهای رسوبی معمولی در منطقه جزر و مدی تخت گل را می توان مطالعه کرد. به عنوان مثال، مورفودینامیک نهر جزر و مدی واقع در بخش غربی منطقه بررسی را می توان با وضوح و دقت کافی توصیف کرد تا تغییرات ژئومورفولوژیکی دقیق (به ترتیب سانتی متر) را ثبت کند. شکل 8 بازآرایی پرپیچ و خم بین عکسهای متوالی متوالی و روی DoD را نشان میدهد. مانند قبل، تراز مواد برای دو دوره محاسبه شد ( جدول 5 ). مهاجرت سریع دهانه نهر جزر و مدی (اتصال با یک کانال اصلی) و همچنین تکامل الگوی پرپیچ و خم به طرز قابل توجهی ثبت شده است.
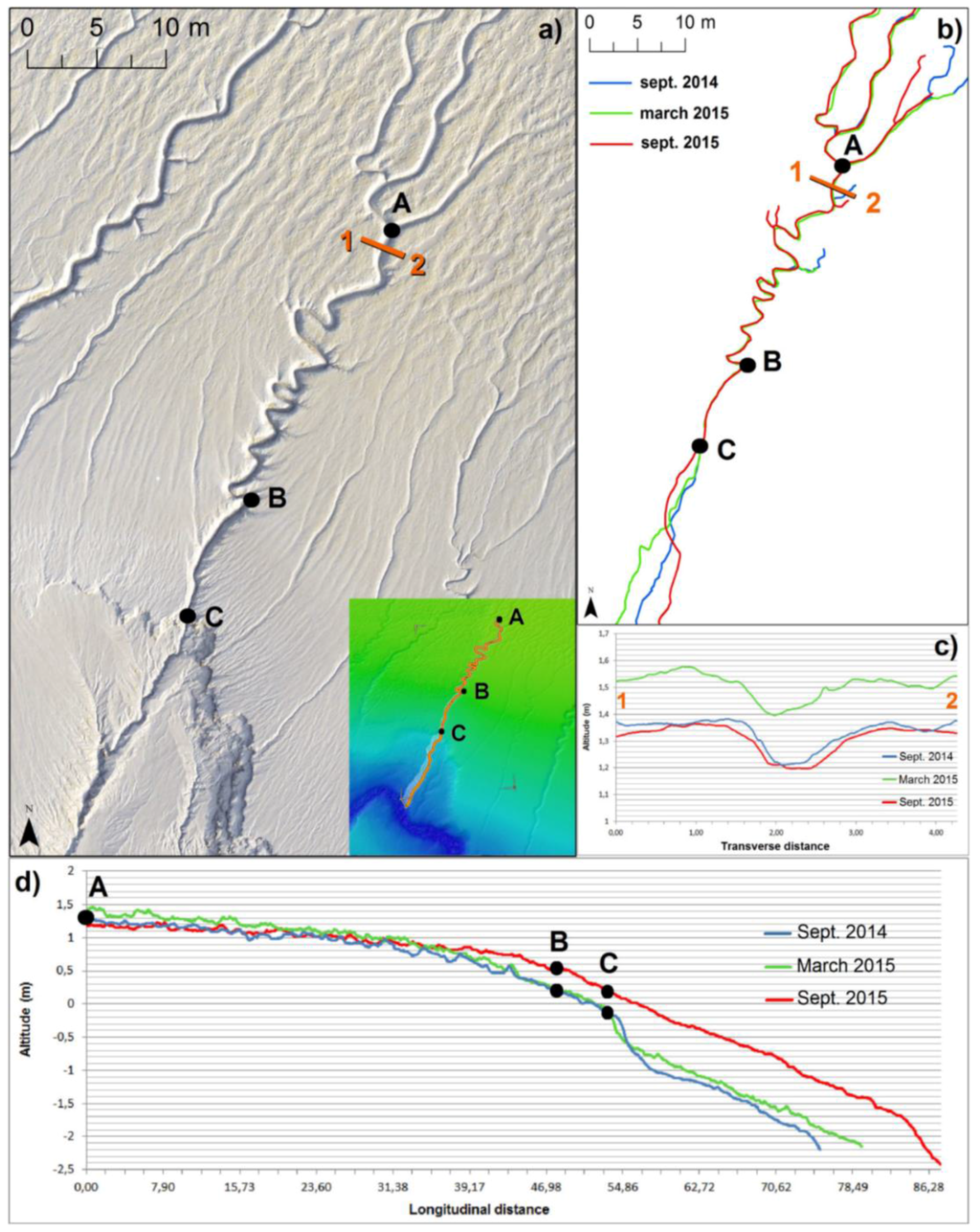
عکسهای ارتوگرافی با وضوح بالا و DEMها نیز ما را قادر میسازند تا مورفولوژی ریز کانالهای عمود بر نهر جزر و مدی اصلی را شناسایی و نقشهبرداری کنیم ( شکل 9 a). از بررسیهای مکرر، میتوان مهاجرت این ریز نهرها و دینامیک پیچ خوردگی آنها را مطالعه کرد ( شکل 9 ب). ویژگی های هندسی اصلی ریز نهر (طول، عرض، عمق و شیب اصلی تالوگ) را می توان همانطور که در شکل 9 c,d در پروفیل های عمودی طولی و عرضی نشان داده شده است استخراج کرد. همه این پارامترها به ما اجازه می دهد تا ظرفیت به دام انداختن یا خروج از شبکه های نهر جزر و مدی را مشخص کنیم. برای مثال، ما تکامل یک ریز نهر را بین سه بررسی زیر نظر داشتیم ( شکل 9). از یک طرف، بخش بالایی ریز نهر (از A تا C) واقع در صفحه جزر و مد فوقانی به صورت جانبی در مقیاس سالانه حرکت نمی کند، در حالی که از طرف دیگر قسمت پایینی ریز نهر واقع در شیب دار قرار دارد. بخشی از گل و لای، پایین دست محل C، به طور قابل توجهی مهاجرت کرده است، که مورفودینامیک سیستم بافته معمولی را نشان می دهد. به طور کلی، به نظر می رسد که سطح بالای جزر و مد در مقیاس فصلی در حال افزایش و فرسایش است ( بخش 1 و بخش 2 در محل A) بدون مهاجرت جانبی.
4.5. پوشش زمین نقشه برداری
مشاهده الگوهای پوشش گیاهی باتلاق نمکی یک قابلیت افزوده SfM از پهپادها است که می تواند توسط جامعه علمی در حال مطالعه بر روی گل و لای بررسی شود. تکامل پوشش زمین توسط گیاهان را می توان از عکس های ارتوپدی و DEM های متوالی ارزیابی کرد. شکل 10 وزارت دفاع بخش شمالی منطقه مورد مطالعه را نشان می دهد. پوشش زمین توسط گیاهان بین سپتامبر 2014 و مارس 2015 کاهش می یابد ( شکل 10 a) و بین مارس 2015 و سپتامبر 2105 افزایش می یابد ( شکل 10 ب). مقایسه نظرسنجی سپتامبر 2014 و سپتامبر 2015 ( شکل 10ج)، برای جلوگیری از تأثیر چرخه رشد گیاهان با در نظر گرفتن بازه زمانی یک سال کامل، سطوح ارتفاعی بسیار مشابه به نظر می رسد (اختلاف کمتر از 5 سانتی متر)، همانطور که انتظار می رود. تغییرات ارتفاع مرتبط با پوشش گیاهی نیز در پشته پروفیل های عمودی استخراج شده از DEM های متوالی قابل مشاهده است ( شکل 10 d,e). اثر پوشش گیاهی بر هیدرودینامیک رسوب را نیز می توان از این مجموعه داده فتوگرامتری پهپاد مورد مطالعه قرار داد. در اینجا، مرز منطقه پوشش گیاهی (بیش از 20 سانتی متر) بین سپتامبر 2014 و مارس 2015 فرسایش یافت که مربوط به عقب نشینی افقی در حدود 1 متر از پوشش گیاهی است.
وضوح مکانی دادههای هوایی ماهوارهای و ارتفاع بالا برای ثبت چنین تغییرات خوبی در تکامل زمانی پوشش زمین گیاه کافی نیست. علاوه بر این، پروازها در ارتفاعات پایینتر را میتوان به منظور دستیابی به وضوح بهتری که امکان طبقهبندی گونههای مختلف گیاهی را فراهم میکند، برنامهریزی کرد، همانطور که قبلاً برای کشاورزی دقیق انجام شده بود [14، 40 ، 41 ] .]. به عنوان مثال، در این مطالعه، پروازها در ارتفاع حدود 100 متر با فاصله کانونی 35 میلی متر انجام شد که وضوح فضایی حدود 2 سانتی متر بر پیکسل را ارائه می کرد. پرواز در ارتفاع 50 متری، وضوح فضایی تصاویر را به 1 سانتی متر بر پیکسل افزایش می دهد. از آنجایی که پوشش زمین کاهش می یابد، سرعت پرواز باید کاهش یابد تا همپوشانی کافی بین تصاویر حفظ شود. توجه داشته باشید که افزایش وضوح لزوماً دقت DEM را افزایش نمیدهد، زیرا عمدتاً توسط دقت DGPS کنترل میشود و در واقع مجموعه دادههای موجود در حال حاضر به حد بالایی دقت میرسند.
5. بحث
5.1. محدودیتهای کاربرد SfM از پهپادها در محیطهای مادفلات
همانطور که قبلا ذکر شد، در مناطق گل و لای، قرار دادن GCP ها و اندازه گیری موقعیت آنها یک مرحله وقت گیر از بررسی است (حدود 2 ساعت برای راه اندازی، اندازه گیری با DGPS، و انتخاب 23 هدف در سپتامبر 2015). این یک نگرانی عمده در شرایطی است که نظرسنجی توسط برنامه جزر و مد محدود شده است. این منجر به تعداد کمی از GCP ها و ارجاعات حقیقت زمینی، با یک تقسیم بندی فضایی زیر بهینه می شود. به نظر میرسد حساسیت زنجیره پردازش فتوگرامتری به عدم وجود GCPs در مناطق پیرامونی منطقه مورد بررسی در این زمینه گلآلود شدید باشد. برای ارزیابی تأثیر توزیع GCP، یک بازگردانی استریو بدون استفاده از GCP قسمت جنوبی محاسبه شده است (GCP 10 تا 15 در شکل 4). در این حالت RMSE افقی 2.0 سانتی متر و RMSE عمودی 5.4 سانتی متر است در حالی که خطای عمودی در قسمت جنوبی به 10 سانتی متر افزایش می یابد. رزولوشن دسیمتریک یا حتی متریک ممکن است برای یک مطالعه مورفولوژیکی توصیفی یا پایش حجم خشن کافی باشد. با این حال، دقت سانتی متری ممکن است در مطالعات دیاکرونیک شامل اکتساب های مکرر به منظور محدود کردن خطاهای حجمی سیستماتیک و در نتیجه ردیابی تغییرات مورفولوژیکی با دامنه کم مورد نیاز باشد.
رویکرد SfM سطح بالاتری از اتوماسیون را اجازه میدهد [ 20 ، 23 ]، اما انتظار میرود که خطاهای سیستماتیک در DEMهای حاصله آشکارتر باشند [ 33 ]. طبق [ 31]، از جمله GCPها در تنظیم بسته ما را قادر می سازد تا خطای z را کاهش دهیم. با این حال، به نظر می رسد که تقسیم مجدد GCP ها یک عامل کلیدی است که بر خطاهای سیستماتیک تأثیر می گذارد. وجود چنین عدم قطعیتهایی در DEM حاصل، پتانسیل SfM را برای بودجهبندی رسوب به مناطقی که تغییرات مورفولوژیکی بیشتر از LoD است محدود میکند. محاسبه LoD نیز توسط تعداد کمی از GRها چالش برانگیز است. RMSE فقط بر روی هفت یا هشت GR محاسبه می شود که در ناحیه مورد علاقه اصلی قرار دارند (همانطور که GCP ها هستند). علاوه بر این، همانطور که RMSE در سراسر سطح به طور میانگین می شود، این رویکرد فرض می کند که LoD از نظر فضایی همگن است [ 37 ]. کمی سازی مکانی دقت DEM ها دشوار است زیرا به سطح اعتبارسنجی با دقت بالاتری به عنوان مرجع حقیقت زمین نیاز دارد [38 ]. در مورد ما، هیچ داده مرجع همزمان (Terrestrial Laser Scan-TLS-، LiDAR توپوگرافی هوایی) در دسترس نیست.
در [ 20 ]، همچنین گزارش شده است که یکی دیگر از محدودیت های رویکرد SfM، وابستگی به بافت تصویر است، زیرا الگوریتم تطبیق تصویر بر آن متکی است. بنابراین بازیابی SfM روی سطوح مسطح و یکنواخت یا سطوح بسیار بازتابنده مانند تختههای گلی که در آن رسوبات سطحی از آب اشباع شده است چالش برانگیز است. وجود گودالها و لایههایی از آب جزر و مدی باقیمانده که سطح گل و لای را میپوشاند، مسئله همبستگی تصویر را تقویت میکند. با این حال، در مطالعه حاضر، فرآیند استریو استریو نتایج رضایتبخشی را علیرغم بافت گل و لای ارائه میدهد. در واقع، وضوح تصویر بالا ما را قادر میسازد تا جزئیات بافتی (کانالهای کوچک، موجها، ردپاها و غیره) را ثبت کنیم.) که به کارایی فرآیند فتوگرامتری SfM کمک می کند. چنین جزئیاتی در تصاویر هوایی یا ماهوارهای که معمولاً وضوح کمتری دارند قابل مشاهده نیستند.
وضوح و دقت بالای DEM ها ما را قادر می سازد تا انتشار خطا در تفاوت DEM را محدود کنیم. برخی از مراجع [ 35 ، 37 ] روش هایی را برای تخمین میزان عدم قطعیت DEM بدون مقایسه حقیقت زمینی، تنها با استفاده از پارامترهای ذاتی داده های خام پیشنهاد می کنند. این روشها (در ابتدا برای دادههای TLS توسعه یافتند) کیفیت DEM را تابعی از کیفیت نقطه بررسی، تراکم نقطه، پیچیدگی توپوگرافی و ناهمواری منطقه و روشهای درونیابی در نظر میگیرند. با توجه به چگالی نقطه بالا (حدود 500 نقطه بر متر مربع ) و برجستگی نسبتاً مسطح، انتظار میرود که خطاهای ناشی از درونیابی کم باشد [ 38]]. بنابراین، این روشهای ارزیابی فضایی خطا با ابر نقطه خام TLS تطبیق داده میشوند، اما لزوماً برای ابرهای نقطه ناشی از گردش کار SfM نیست.
در مقایسه با ارتفاع سنجهای نقطهای ALTUS، وزارت دفاع ارزیابی فضایی تغییرات ژئومورفولوژیکی را ارائه میدهد. بنابراین، بودجههای رسوبی بهدستآمده، تنوع فضایی فلت گلی را در نظر میگیرند. برعکس، ارتفاع سنجهای ALTUS ضبط مداوم تغییرات ارتفاع را ارائه میدهند، در حالی که وزارت دفاع دارای وضوح زمانی درشتی است زیرا نشاندهنده تجمع تغییراتی است که بین تاریخهای هر بررسی رخ داده است. این دو رویکرد مکمل یکدیگر هستند و بینشی در مورد پویایی خور و فرآیندهای اساسی ارائه می دهند.
5.2. رهنمودهای عملی برای مانیتورینگ پهپادهای گل و لای
در اینجا ما تعدادی دستورالعمل را پیشنهاد میکنیم که به بهینهسازی کیفیت دادههای بهدستآمده برای SfM از پهپاد بر روی زمینهای گلی کمک میکند. برای محدود کردن اثرات درخشش خورشید در سطح رسوبات اشباع شده از آب، از جمله بر روی گودالها و فیلمهای آب جزر و مدی باقیمانده، پروازها ترجیحاً در هوای ابری، و در اوایل صبح یا اواخر عصر، در صورت سازگاری با جزر و مد انجام میشد. در صورت امکان، تغییر جهت دوربین ممکن است به بهبود کارایی گردش کار SfM کمک کند [ 33 ].
ارتفاع پرواز پهپاد باید به اندازهای کم باشد که عکسهای بهدستآمده وضوح کافی برای ثبت جزئیات بافتی داشته باشند که به اجرای روان جریان کار SfM کمک میکند.
نتایج نشان میدهد که اگر GCPها به طور یکنواختتر در کل منطقه بررسی، از جمله مناطق پیرامونی توزیع شوند، دقت DEM بیشتر خواهد بود. از این رو، باید بین زمان اکتساب و توزیع هدف سازشی پیدا کرد. برخی از اهداف را می توان به راحتی در محدوده منطقه پوشش گیاهی اضافه کرد. علاوه بر این، ممکن است برای افرادی که اهداف را تنظیم میکنند، داشتن دیدگاهی همدید از تقسیم مجدد آنها دشوار باشد. موقعیت اهداف (که به عنوان GCP و GR استفاده می شود) را می توان از قبل با در نظر گرفتن دشواری های زمین انتخاب کرد و افراد می توانستند با GPS دستی به میدان بروند تا اهداف را در موقعیت های انتخاب شده تنظیم کنند. یک راه حل جایگزین تغییر استراتژی بررسی، به ویژه طرح پرواز، با پیروی از دستورالعمل های پیشنهاد شده توسط [ 33] است] به منظور کاهش تغییر شکل سطح. یک پیشرفت قابل پیشبینی، به لطف کوچکسازی حسگر، کاهش تعداد اهداف مورد نیاز با استفاده از سنسورهای ناوبری با دقت کافی خواهد بود.
6. نتیجه گیری
عکسهای پهپاد و DEM، عکسهای اورتوفوگراف و وزارت دفاع بهدستآمده، اطلاعات فراوانی را برای مطالعات گل و لای فراهم میکنند. با توجه به بافت زمین چنین محیط هایی، فرآیند استریو استریو به لطف وضوح فضایی بالای عکس های پهپاد امکان پذیر شده است. برای هر ماموریت پهپاد، عکسهای ارتو و DEMهای محاسبهشده به ترتیب با وضوح حدود ۲ و ۴ سانتیمتر ساخته شدهاند. RMSE های افقی و عمودی DEM که بر روی هشت نقطه GR محاسبه شده اند، کمتر از 5 سانتی متر هستند.
بررسیهای فتوگرامتری هوایی با ارائه یک نمای سینوپتیک، ارزش قابل توجهی را هنگام نظارت بر مناطق بزرگ میافزایند. گستره فضایی اطلاعات یک دارایی کلیدی در مطالعه دینامیک گل و لای است. هر دو تنوع در ساحل و متقاطع با وضوح و دقت بالا ضبط می شوند. فتوگرامتری پهپاد همچنین مطالعات چند مقیاسی را با مشخص کردن و کمی کردن دینامیک رسوب برای نظارت بر روند کلی در مناطق بزرگ و همچنین تکامل ساختارهای کوچکتر امکان پذیر می کند، بنابراین احتمالاً نقش ساختارهای کوچکتر را در پاسخ در مقیاس بزرگ استنباط می کند.
به منظور دور زدن اثرات درونیابی زمانی نرخهای تغییر، این رویکرد دیاکرونیک را میتوان با ترکیب آن با مجموعه دادههای ALTUS نقطهای و پیوسته به منظور استنباط زمان و چرایی تغییرات غنیتر کرد.









بدون نظر