

خلاصه
الگوهای مکانی-زمانی در حال تکامل ؛ دامنه های هدف ؛ رویدادهای فضایی-زمانی توییتر ؛ خوشه بندی فضایی ; خوشه بندی مکانی-زمانی
1. معرفی
-
توسعه یک چارچوب استخراج: یک چارچوب یکپارچه برای کشف الگوهای مکانی-زمانی مرتبط با دامنه در حال تکامل در توییتر پیشنهاد شده است. دانش قبلی در چارچوب جدید مورد نیاز نیست.
-
استخراج رویدادهای توییتر مرتبط با دامنه با گسترش پرس و جو پویا: برای دامنه هدف، توییت های مرتبط را می توان با استفاده از استراتژی گسترش پرس و جو پویا به دست آورد. این توییتهایی که با اطلاعات مکان جغرافیایی و زمان برچسب گذاری شدهاند، رویدادهای فضایی-زمانی توییتر را تشکیل میدهند.
-
کشف الگوهای مکانی-زمانی در حال تکامل از رویدادهای توییتر: برای رویدادهای فضایی-زمانی توییتر مربوط به دامنه استخراج شده، خوشههای مکانی و نقاط پرت با خوشهبندی مکانی شناسایی میشوند، پس از آن الگوهای مکانی-زمانی با خوشهبندی مکانی-زمانی در حین تکاملشان کشف میشوند.
-
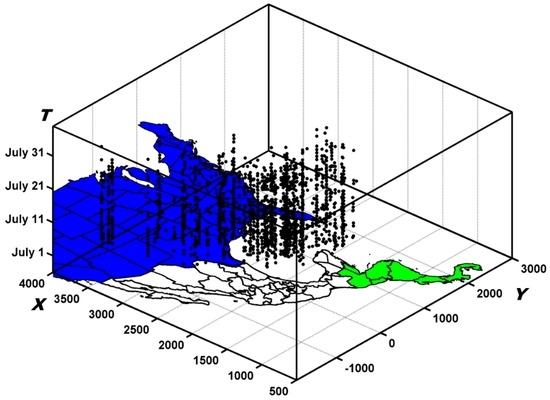
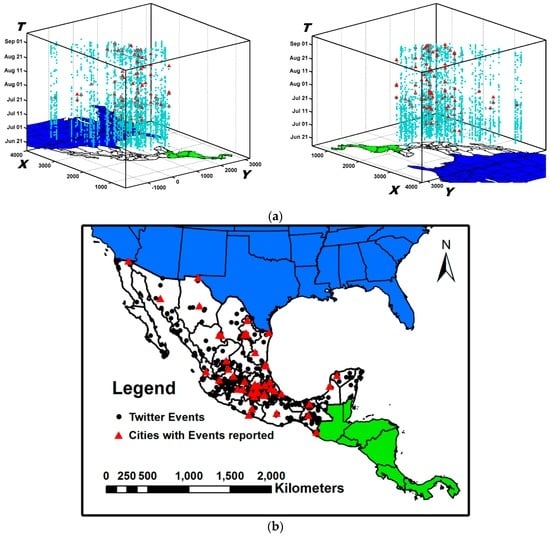
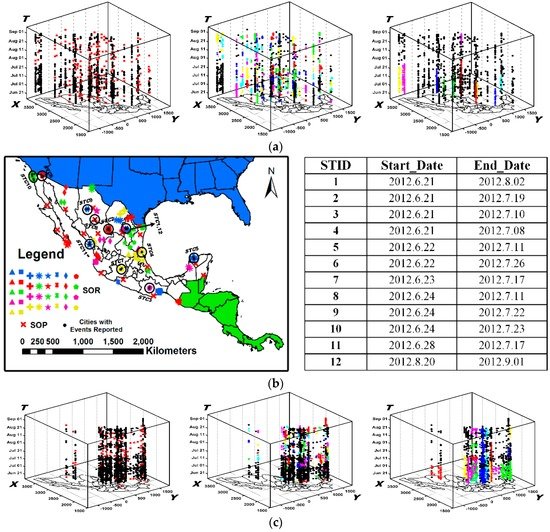
ارزیابی تجربی با استفاده از دادههای واقعی توییتر: چارچوب پیشنهادی بهطور گسترده برای رویدادهای فضایی-زمانی توییتر مربوط به «ناآرامیهای مدنی» در مکزیک آزمایش شد. مزایا و اثربخشی روش جدید با مقایسه نتایج با روش های جایگزین و داده های پایه نشان داده شده است.
2. کارهای مرتبط
2.1. استخراج رویداد توییتر
2.2. خوشه، Outlier و تشخیص نقطه هات
3. انگیزه و استراتژی پیشنهادی
3.1. انگیزه
3.2. یک استراتژی جدید برای کشف الگوهای فضایی-زمانی مرتبط با دامنه در حال تکامل در توییتر
4. تشخیص رویداد توییتر مرتبط با دامنه
4.1. تعاریف پایه
4.2. بسط پرس و جو پویا
4.3. رویدادهای فضایی-زمانی توییتر
5. کشف الگوهای مکانی-زمانی در حال تکامل
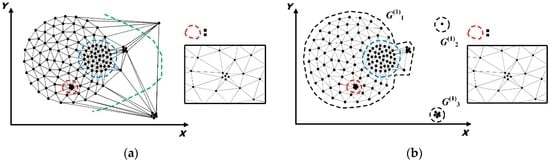
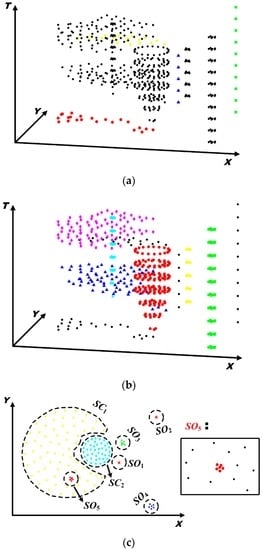
5.1. تشخیص الگوهای توزیع فضایی
5.1.1. شناسایی و حذف لبه های I-Long
که در آن DT نشان دهنده مثلث Delaunay است در حالی که E i هر یالی در DT با طول | E i |. میانگین ( DT ) و Std ( DT ) به ترتیب میانگین طول یال ها در DT و استاندارد مربوطه را نشان می دهند.
5.1.2. شناسایی و حذف II- لبه های بلند
که در آن Std ( G (1) k ) نشان دهنده میانگین استاندارد LE i در G (1) k است . به همین ترتیب، مهآn(LEمن)|Loجآل_Eدgه(j)|همچنین یک ضریب تنظیم برای شناسایی کافی لبه های طول II است .
5.1.3. شناسایی و حذف لبه های بلند III
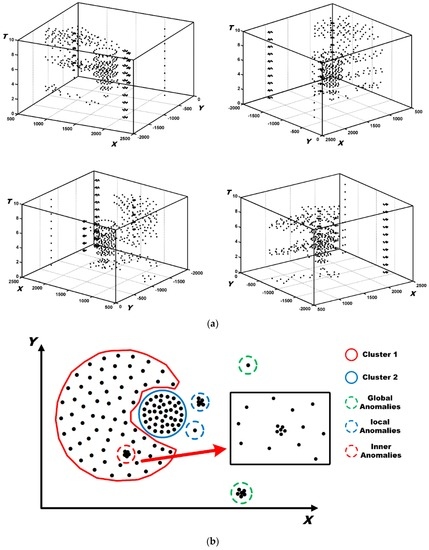
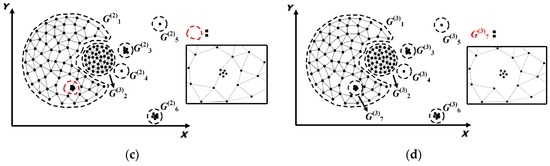
5.1.4. تعیین الگوهای فضایی
که در آن میانگین ( RVol ) و Std ( RVol ) به ترتیب نشان دهنده مقدار متوسط و استاندارد مجموعه RVol هستند . برای یک نمودار فرعی کوچکتر، عبارت سمت راست نماد “≤” در معادله (10) مقدار بیشتری خواهد داشت و بنابراین می تواند برای شناسایی نقاط پرت فضایی استفاده شود. شکل 5 a,b به ترتیب نقاط و نواحی پرت فضایی را نشان می دهد در حالی که شکل 5 c خوشه های فضایی را نشان می دهد.
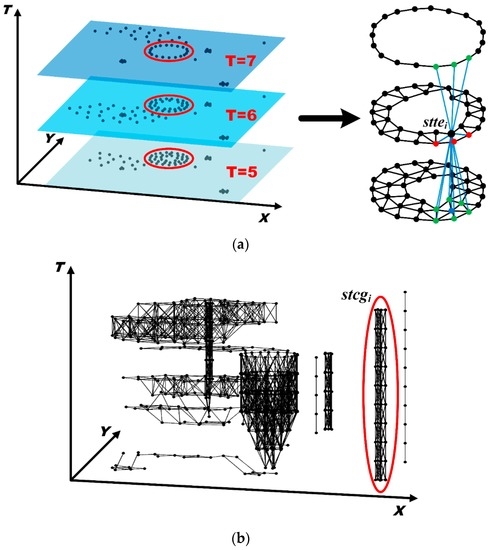
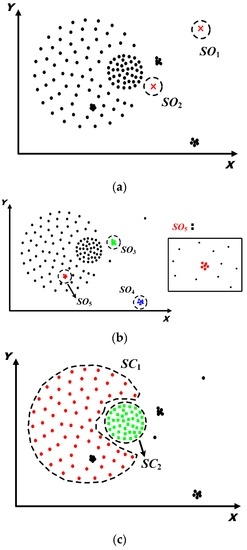
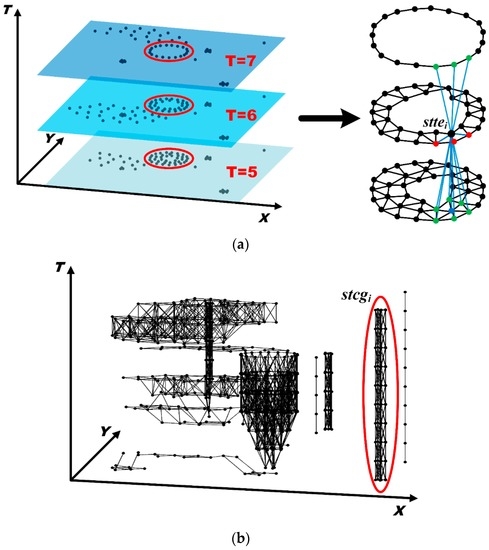
5.2. کشف الگوهای در حال تکامل مکانی-زمانی
- (من)
-
همه رویدادهای فضایی-زمانی توییتر متعلق به SN δ ( stte i );
- (II)
-
همه رویدادهای فضایی-زمانی توییتر متعلق به TN ε ( stte i ); و
- (iii)
-
همه رویدادهای فضایی- زمانی توییتر مربوط به رویدادهای فضایی توییتر در SN δ ( ste i’ ) با IsOccur _ T twi ( tw i∈ TW ε )=1، که در آن ste i’ رویداد فضایی توییتر stte i است .
5.3. الگوریتم_تحول_الگوی_کشف
-
ورودی: رویدادهای فضایی-زمانی توییتر STTE ، رویدادهای فضایی توییتر پیش بینی شده STE ، آستانه δ و ε
-
خروجی: الگوهای مکانی-زمانی در حال تکامل
- (من)
-
مثلث Delaunay را برای STE بسازید تا نمودار مجاورت فضایی اولیه را بدست آورید.
- (II)
-
لبههای بلند ناسازگار، یعنی لبههای بلند I، لبههای بلند II و لبههای بلند III را از مثلث دلونی شناسایی و حذف کنید.
- (iii)
-
نمودارهای فرعی متصل را استخراج کنید و خوشه های فضایی و نقاط پرت را بر اساس حجم هر زیرگراف متصل شناسایی کنید.
- (من)
-
همسایگی های فضایی هر رویداد فضایی توییتر و همسایگی های مکانی هر رویداد فضایی-زمانی توییتر را بر اساس δ ;
- (II)
-
پنجره های زمانی را بر اساس ε بسازید و همسایگی های زمانی هر رویداد فضایی-زمانی توییتر را تعیین کنید.
- (iii)
-
محله های مکانی-زمانی هر رویداد فضایی-زمانی توییتر را تعیین کنید. و
- (IV)
-
نمودارهای متصل مکانی-زمانی را بر اساس روابط مجاورت مکانی-زمانی استخراج کنید و خوشه های مکانی-زمانی و نقاط پرت را بر اساس حجم هر نمودار متصل مکانی-زمانی شناسایی کنید.
6. ارزیابی تجربی و تجزیه و تحلیل با تجسم
6.1. مجموعه داده ها و برچسب ها
6.2. مقایسه های تجربی
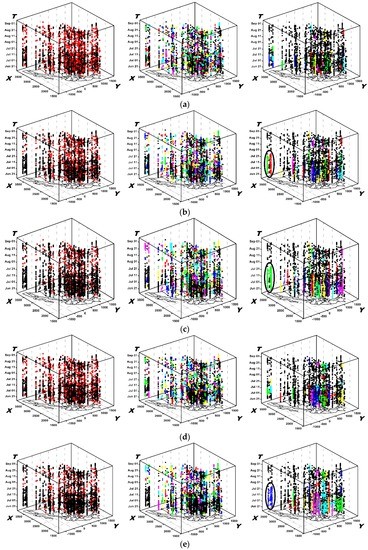
6.2.1. نتایج به دست آمده با روش جدید
6.2.2. نتایج بدست آمده توسط ST-DBSCAN
6.2.3. نتایج بدست آمده توسط STSNN
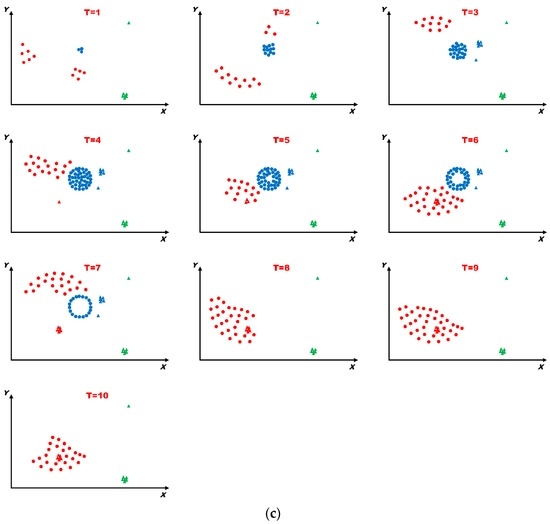
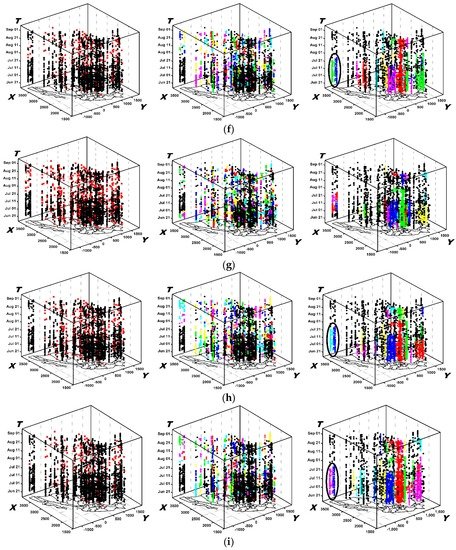
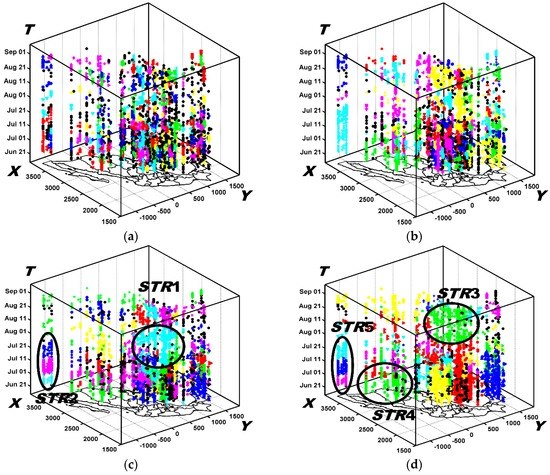
6.3. تجزیه و تحلیل الگوهای مکانی-زمانی در حال تحول
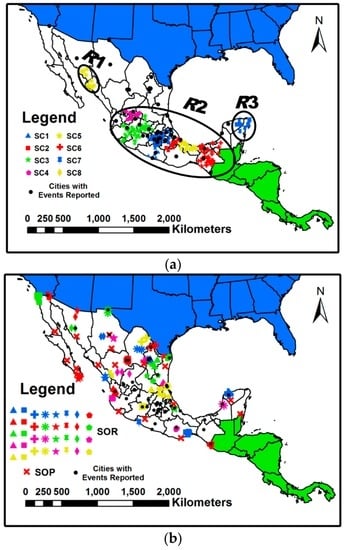
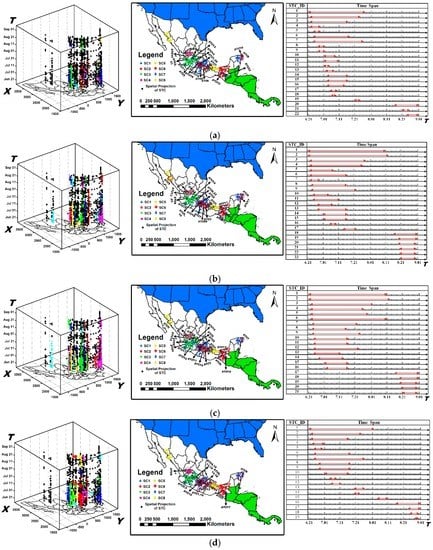
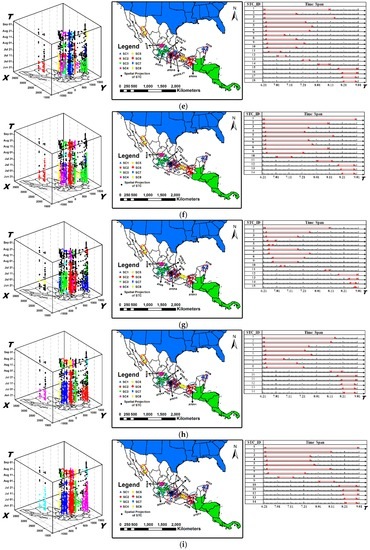
6.3.1. تجزیه و تحلیل خوشه های مکانی- زمانی با روش ما
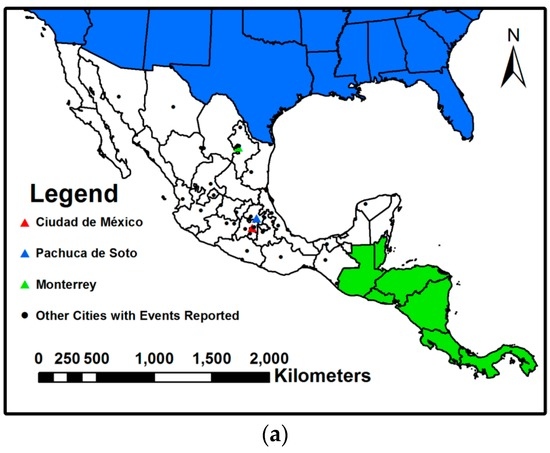
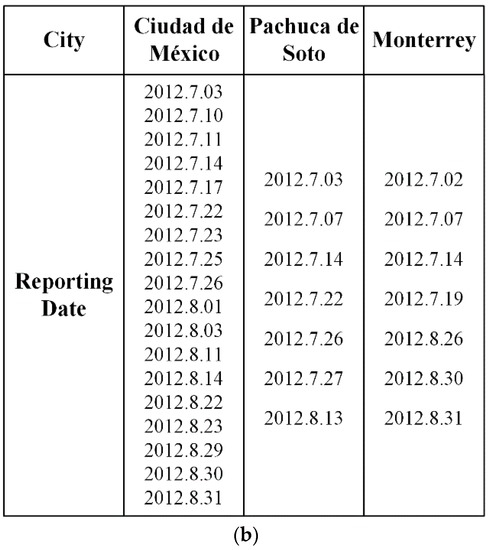
6.3.2. مقایسه با برچسب ها
7. نتیجه گیری
منابع
- جاوا، A. آهنگ، X. فینین، تی. Tseng، B. چرا ما توییتر می کنیم: درک استفاده از میکروبلاگینگ و جوامع. در مجموعه مقالات نهمین WebKDD و اولین کارگاه SNAKDD 2007 در مورد وب کاوی و تجزیه و تحلیل شبکه های اجتماعی، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 12 تا 15 اوت 2007. صص 56-65.
- چنگ، ا. مارک، ای. هارشدی، اس. داخل توییتر: نگاهی عمیق به دنیای توییتر . SYSOMOS: تورنتو، ON، کانادا، ژوئن 2009. [ Google Scholar ]
- دی آلبوکرک، جی پی; هرفورت، بی. برنینگ، آ. Zipf، A. یک رویکرد جغرافیایی برای ترکیب رسانه های اجتماعی و داده های معتبر به منظور شناسایی اطلاعات مفید برای مدیریت بلایا. بین المللی جی. جئوگر. Inf. علمی 2015 . [ Google Scholar ] [ CrossRef ]
- هیورین، تی. Zach, L. میکروبلاگینگ برای ارتباطات بحران: بررسی استفاده از توییتر در پاسخ به یک بحران خشونت آمیز در سال 2009 در سیاتل-تاکوما، منطقه واشنگتن. در مجموعه مقالات هفتمین کنفرانس بین المللی ISCRAM، سیاتل، WA، ایالات متحده آمریکا، 2-5 مه 2010.
- پان، بی. ژنگ، ی. ویلکی، دی. شهابی، ج. سنجش جمعیت از ناهنجاری های ترافیکی بر اساس تحرک انسان و رسانه های اجتماعی. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، اورلاندو، فلوریدا، ایالات متحده آمریکا، 5 تا 8 نوامبر 2013. صص 334-343.
- جویدن، سی. آیزنباخ، جی. همهگیریها در عصر توییتر: تحلیل محتوای توییتها در طول شیوع H1N1 در سال 2009. PLoS ONE 2009 ، 5 ، e14118. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- راماژ، دی. دومایس، اس. Liebling، D. مشخص کردن میکروبلاگ ها با مدل های موضوعی. در مجموعه مقالات چهارمین کنفرانس بین المللی AAAI در وبلاگ ها و رسانه های اجتماعی، واشنگتن، دی سی، ایالات متحده آمریکا، 23 تا 26 مه 2010. صص 130-137.
- Markman, V. کشف بدون نظارت خوشههای موضوعی ریز در پستهای توییتر. پاپ AAAI کارگاه مقعدی. Microtext 2011 ، WS-11-05 ، 32-37. [ Google Scholar ]
- فوجیساکا، تی. لی، آر. Sumiya, K. تشخیص مکان های غیرمعمول شلوغ از طریق سایت های میکروبلاگینگ. در مجموعه مقالات بیست و چهارمین کنفرانس بین المللی IEEE 2010 در کارگاه های آموزشی شبکه های اطلاعاتی پیشرفته و برنامه های کاربردی، پرت، استرالیا، 20-23 آوریل 2010. صص 467-472.
- لی، آر. واکامیا، س. سومیا، ک. کشف فعالیتهای اجتماعی غیرمعمول منطقهای با استفاده از میکروبلاگهای دارای برچسب جغرافیایی. وب جهانی 2011 ، 14 ، 321-349. [ Google Scholar ] [ CrossRef ]
- چای، جی. تام، دی. بوش، اچ. جانگ، ی. Maciejewski، R. تجزیه و تحلیل رسانه های اجتماعی فضایی-زمانی برای تشخیص رویداد غیرعادی یک بررسی با استفاده از تجزیه فصلی روند. در مجموعه مقالات کنفرانس IEEE 2012 در علم و فناوری تجزیه و تحلیل بصری (VAST)، سیاتل، WA، ایالات متحده آمریکا، 14-19 اکتبر 2012. صص 143-152.
- چنگ، تی. Wicks, T. تشخیص رویداد با استفاده از توییتر: یک رویکرد مکانی-زمانی. PLoS ONE 2014 ، 9 ، e97807. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژائو، ال. چن، اف. دای، جی. هوآ، تی. لو، سی.-تی. راماکریشنان، ن. تشخیص رویداد فضایی بدون نظارت در حوزه های هدفمند با برنامه های کاربردی برای مدل سازی ناآرامی های مدنی. PLoS ONE 2014 ، 9 ، e110206. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- باکیالله، م. لی، RY; Liang، SH شناسایی جامعه جغرافیایی در توییتر با بهینهسازی سریع ماژولاریته: مطالعه موردی طوفان Haiyan. بین المللی جی. جئوگر. Inf. علمی 2014 . [ Google Scholar ] [ CrossRef ]
- لیو، کیو. دنگ، م. بی، جی. یانگ، دبلیو. روشی جدید برای کشف خوشههای مکانی-زمانی با اندازهها، شکلها و چگالیهای مختلف در حضور نویز. بین المللی جی دیجیت. زمین 2014 ، 7 ، 138-157. [ Google Scholar ] [ CrossRef ]
- بلی، دی. نگ، ا. جردن، M. تخصیص دیریکله نهفته. جی. ماخ. فرا گرفتن. Res. 2003 ، 3 ، 993-1022. [ Google Scholar ]
- سیگنورینی، آ. Segre, AM; Polgreen, PM استفاده از توییتر برای ردیابی سطوح فعالیت بیماری و نگرانی عمومی در ایالات متحده در طول همهگیری آنفولانزای H1N1. PLoS ONE 2011 ، 6 ، e19467. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چاکرابارتی، دی. Punera، K. خلاصهسازی رویداد با استفاده از توییتها. در مجموعه مقالات پنجمین کنفرانس بین المللی AAAI در وبلاگ ها و رسانه های اجتماعی، بارسلون، اسپانیا، 17 تا 21 ژوئیه 2011. صص 66-73.
- وانگ، ام. وانگ، آ. Li، A. استخراج خوشه های مکانی-زمانی از پایگاه داده های جغرافیایی. لکت. یادداشت ها Artif. هوشمند 2006 ، 4093 ، 263-270. [ Google Scholar ]
- چنگ، تی. Li، Z. یک رویکرد چند مقیاسی برای تشخیص نقاط پرت مکانی-زمانی. ترانس. GIS 2006 ، 10 ، 253-263. [ Google Scholar ] [ CrossRef ]
- وو، ای. لیو، دبلیو. Chawla، S. تشخیص پرت مکانی-زمانی در داده های بارش. دانستن کشف کنید. Sens. Data 2010 ، 5840 ، 115-133. [ Google Scholar ]
- کولدورف، ام. هفرنان، آر. هارتمن، جی. آسونسائو، آر. مستشاری، ف. آمار اسکن جایگشت فضا-زمان برای تشخیص شیوع بیماری. PLoS Med. 2005 ، 2 ، e59. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- لیو، پی. ژو، دی. Wu, N. VDBSCAN: خوشه بندی فضایی مبتنی بر چگالی متنوع کاربرد با نویز. در مجموعه مقالات کنفرانس بین المللی 2007 در سیستم های خدمات و مدیریت خدمات، چنگدو، چین، 9-11 ژوئن 2007. صص 528-531.
- ونگ، جی. لی، BS تشخیص رویداد در توییتر. در مجموعه مقالات پنجمین کنفرانس بین المللی AAAI در وبلاگ ها و رسانه های اجتماعی، بارسلون، اسپانیا، 17 تا 21 ژوئیه 2011. ص 401-408.
- استیویل کاسترو، وی. Lee, I. خوشهبندی بدون استدلال برای مجموعه دادههای نقطهای مکانی بزرگ. محاسبه کنید. محیط زیست سیستم شهری 2002 ، 26 ، 315-334. [ Google Scholar ] [ CrossRef ]
- دنگ، م. لیو، کیو. چنگ، تی. Shi, Y. یک الگوریتم خوشهبندی فضایی تطبیقی مبتنی بر مثلثسازی دلونی. محاسبه کنید. محیط زیست سیستم شهری 2011 ، 35 ، 320-332. [ Google Scholar ] [ CrossRef ]
- جیانگ، M.-F. Tseng، S.-S.; سو، سی.-ام. فرآیند خوشه بندی دو فازی برای تشخیص نقاط پرت. تشخیص الگو Lett. 2001 ، 22 ، 691-700. [ Google Scholar ] [ CrossRef ]
- الذوبی، م.ب. الدهود، ع.ا. یحیی، ع. روش جدید تشخیص پرت مبتنی بر خوشه بندی فازی. WSEAS Trans. Inf. علمی Appl. 2010 ، 7 ، 681-690. [ Google Scholar ]
- شی، ی. دنگ، م. یانگ، ایکس. لیو، کیو. تشخیص تطبیقی نقاط پرت رویداد نقطه فضایی با استفاده از مثلث بندی دلونی محدود شده چند سطحی. محاسبه کنید. محیط زیست سیستم شهری 2016 . [ Google Scholar ] [ CrossRef ]
- وانگ، جی. Ge، Y. لی، ال. منگ، بی. وو، جی. پسر.؛ دو، اس. لیائو، ی. هو، م. Xu, C. تجزیه و تحلیل داده های فضایی و زمانی در جغرافیا. Acta Geogr. گناه 2014 ، 69 ، 1326-1345. [ Google Scholar ]
- چنگ، تی. Adepeju، M. مسئله واحد زمانی قابل تغییر (MTUP) و تأثیر آن بر تشخیص خوشه فضا-زمان. PLoS ONE 2014 ، 9 ، e100465. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هوانگ، Q. Wong، DWS مدلسازی و تجسم الگوهای حرکتی منظم انسان با عدم قطعیت: مثالی با استفاده از دادههای توییتر. ان دانشیار صبح. Geogr. 2015 ، 105 ، 1179-1197. [ Google Scholar ] [ CrossRef ]
- ژنگ، ی. روشهای ادغام دادههای متقابل دامنه: یک مرور کلی. IEEE Trans. کلان داده 2015 ، 1 ، 16-34. [ Google Scholar ] [ CrossRef ]
- ژنگ، ی. ژانگ، اچ. Yu, Y. تشخیص ناهنجاری های جمعی از مجموعه داده های مکانی-زمانی متعدد در دامنه های مختلف. در مجموعه مقالات بیست و سومین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، Bellevue، WA، ایالات متحده، 3-6 نوامبر 2015. صص 1-10.




© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر