

خلاصه
تشخیص تغییر کاربری زمین ; مدل رشد شهری ; اتوماتای سلولی ; کلنی زنبورهای مصنوعی
1. معرفی
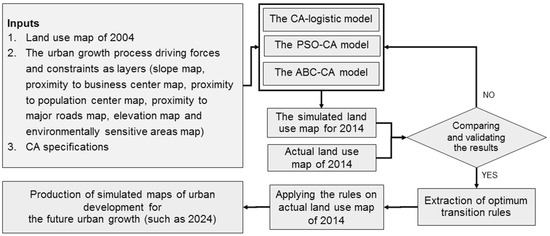
2. مدلسازی رشد شهری توسط CA
جایی که پتیمن جپمن�تیپتانسیل توسعه سلول ij است . استیمن جاسمن�تیمناسب بودن سلول ij برای تغییر بر اساس عوامل مرتبط در زمان های t است . Ωتیمن جΩمن�تیاثر تراکم توسعه محله است. e r یک اصطلاح اختلال تصادفی برای خطاهای ناشناخته است. و Con محدودیت هایی هستند که به عوامل تأثیرگذار اشاره می کنند که رشد شهری را در برخی مناطق از جمله مناطق حساس زیست محیطی یا مناطق کوهستانی حذف می کنند. این یک تابع شرطی است و زمانی درست می شود که مناسب بودن سلول برای رشد پیدا شود [ 40 ]. پتانسیل توسعه محاسبه شده با یک مقدار آستانه بر اساس تقاضای زمین در آینده مقایسه می شود تا تصمیم بگیرد که آیا یک سلول غیر شهری می تواند در زمان t + 1 به سلول شهری تبدیل شود [ 22 ، 34 ].
3. الگوریتم کلونی زنبورهای مصنوعی
که در آن i = 1، … ، SN، j = 1، … ، D. SN تعداد راه حل ها (منابع غذایی) و D نشان دهنده تعداد پارامترهای بهینه سازی است. در الگوریتم اصلی ABC به عنوان یک الگوریتم مبتنی بر جمعیت، تعیین جمعیت اولیه مرحله اصلی است که به صورت تصادفی انجام می شود. این بدان معنی است که هیچ اطلاعات اولیه ای در مورد راه حل وجود ندارد. بهبود در پیکربندی جمعیت اولیه الگوریتم ABC می تواند بر همگرایی الگوریتم و کیفیت نتایج تأثیر بگذارد [ 63 ]. استفاده از نقشه های آشفته در فرآیند اولیه سازی الگوریتم ABC می تواند یک جمعیت اولیه مناسب ایجاد کند [ 66]. از نقشه های آشفته می توان برای افزایش تنوع جمعیت با بهره برداری از اطلاعات فضای جستجو استفاده کرد. روال های آشفته به عنوان یک فرآیند تکرار سینوسی (معادله (3)) می تواند برای ایجاد یک رویکرد اولیه سازی موثر [ 63 ] استفاده شود. بنابراین، در این مقاله، جمعیت اولیه با اجرای یک روال آشفته تولید میشود. به منظور بهبود جمعیت اولیه از رابطه (4) به جای معادله (2) استفاده شده است.
که در آن j یک عدد تصادفی در (1، D است ) ( D نشان دهنده تعداد پارامترهای بهینه سازی است) و k ∈ { 1 , 2 , … , Sن}ک∈{1،2،…،اسن}یک شاخص تصادفی است که باید با i متفاوت باشد . φمن ج�من�یک عدد واقعی توزیع شده یکنواخت در (-1، 1) را نشان می دهد که تولید محل منبع غذا را در اطراف X ij کنترل می کند . یک راه حل بهتر بین X ij و V ij در مرحله بعد با معادله (6) انتخاب می شود:
که در آن f i مقدار بهای تمام شده راه حل تولید شده i و abs مقدار مطلق است. “راه حل حریصانه” بر اساس سودآوری بین ساخته شده است ایکسm nایکسمتر�و V mn . سپس یک انتخاب حریصانه بر اساس سودآوری بین X ij و V mn انجام می شود . مقادیر احتمال برای حل X ij با معادله (7) محاسبه می شود:
4. الگوریتم بهینه سازی ازدحام ذرات
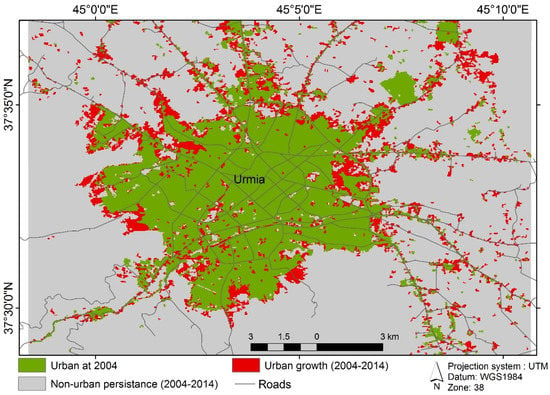
5. منطقه مطالعه و مجموعه داده ها
6. نتایج پیاده سازی و شبیه سازی
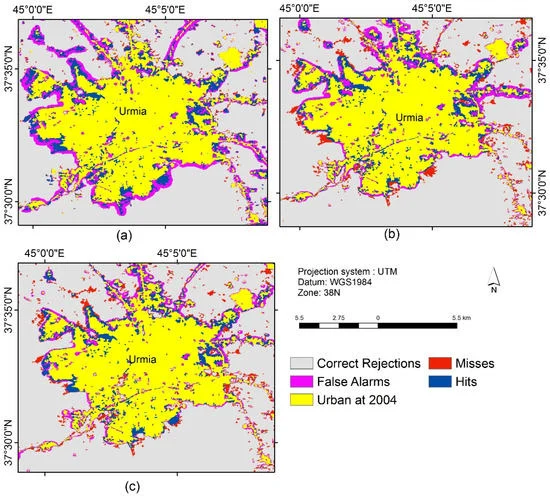
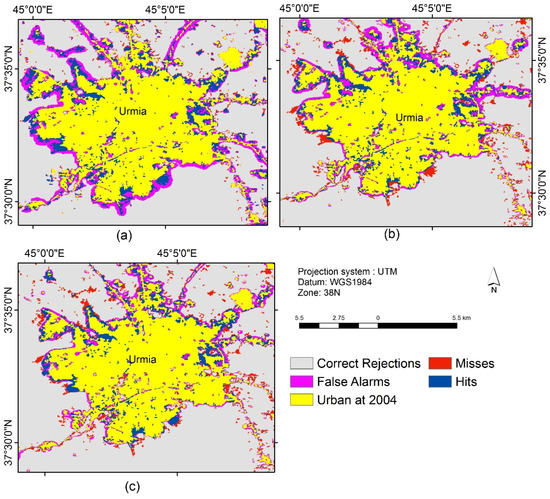
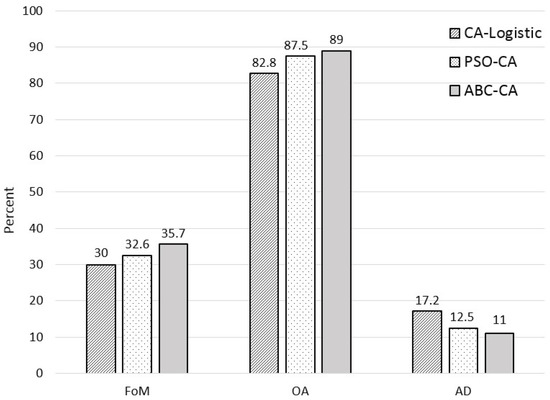
که در آن A ناحیه خطای ناشی از تغییر مشاهده شده است که به عنوان تداوم پیش بینی شده است، B ناحیه صحت ناشی از تغییر مشاهده شده است که به عنوان تغییر پیش بینی شده است، C ناحیه خطای ناشی از تغییر مشاهده شده است که به عنوان دسته اشتباه پیش بینی شده است، و D منطقه است. خطای ناشی از تداوم مشاهده شده به عنوان تغییر پیش بینی شد. شکل 9 نشان می دهد که مدل ABC-CA در مقایسه با مدل های PSO-CA و CA-logistic عملکرد بهتری داشته است.
7. بحث
8. نتیجه گیری
منابع
- فراقیاس، م. بون، CG به سوی چارچوبی جدید برای شهرنشینی و پایداری: پیوند بومشناسی شهری، عدالت زیستمحیطی و تغییر جهانی محیطزیست ؛ Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2013. [ Google Scholar ]
- مک کینی، ML شهرسازی، تنوع زیستی و حفاظت. BioScience 2013 ، 5210 ، 883-890. [ Google Scholar ] [ CrossRef ]
- تانگ، ز. انگل، کارشناسی; پیجانوفسکی، ق.م. پیش بینی تغییر کاربری اراضی و اثرات زیست محیطی آن در مقیاس حوضه آبخیز لیم، کی جی. جی. محیط زیست. مدیریت 2005 ، 761 ، 35-45. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- وایلی، ام جی. Hyndman، DW; پیجانوفسکی، ق.م. کندال، AD; ریسنگ، سی. رادرفورد، ES; Rediske، RR یک رویکرد چند مدل سازی برای ارزیابی اثرات تغییر آب و هوا و کاربری زمین در حوضه رودخانه بزرگ دریاچه ها. Hydrobiologia 2010 ، 6571 ، 243-262. [ Google Scholar ] [ CrossRef ]
- LaBeau، MB; رابرتسون، دی.م. مایر، ع. پیجانوفسکی، ق.م. سعد، DA اثرات توسعه محصولات شهری و سوخت زیستی آینده بر صادرات رودخانه فسفر به دریاچههای بزرگ لورنسی. Ecol. مدل. 2014 ، 277 ، 27-37. [ Google Scholar ] [ CrossRef ]
- دوان، AM; یاماگوچی، ی. رحمان، ام. جئوژورنال 2012 ، 77 ، 315-330. [ Google Scholar ] [ CrossRef ]
- فرومکین، اچ. گسترش شهری و سلامت عمومی. بهداشت عمومی، 2002 ، 117 ، 201-217. [ Google Scholar ] [ CrossRef ]
- خو، X. دو، ز. ژانگ، اچ. ادغام مدلهای اتوماتای پویا و سلولی سیستم برای پیشبینی کاربری زمین و تغییر پوشش زمین. بین المللی J. Appl. زمین Obs. Geoinf. 2016 ، 52 ، 568-579. [ Google Scholar ] [ CrossRef ]
- هوانگ، جی. Gao, W. مطالعه شبیه سازی بر روی مدل CA بر اساس بهینه سازی پارامتر الگوریتم ژنتیک و توسعه شهری. اقدام کرد. مهندس 2011 ، 15 ، 2175-2179. [ Google Scholar ] [ CrossRef ]
- شن، Q. چن، کیو. تانگ، BS; یونگ، اس. هو، ی. Cheung، G. مدل پویایی سیستم برای برنامه ریزی و توسعه کاربری پایدار. Habitat Int. 2009 ، 33 ، 15-25. [ Google Scholar ] [ CrossRef ]
- Basse، RM; عمرانی، ح. Charif، O. گربر، پی. Bódis، K. مدلسازی تغییرات کاربری زمین با استفاده از روشهای پیشرفته: اتوماتای سلولی و شبکههای عصبی مصنوعی. نمایش فضایی و صریح پویایی پوشش زمین در مقیاس منطقه فرامرزی Appl. Geogr. 2014 ، 53 ، 160-171. [ Google Scholar ] [ CrossRef ]
- باتی، م. زی، ی. Sun، Z. مدلسازی دینامیک شهری از طریق اتوماتای سلولی مبتنی بر GIS. محاسبه کنید. محیط زیست سیستم شهری 1999 ، 233 ، 205-233. [ Google Scholar ] [ CrossRef ]
- گوان، دی. لی، اچ. اینوهه، تی. سو، دبلیو. نگائی، تی. هوکائو، ک. مدلسازی تغییر کاربری زمین شهری با ادغام خودکار سلولی و مدل مارکوف. Ecol. مدل. 2011 ، 222 ، 3761-3772. [ Google Scholar ] [ CrossRef ]
- براون، DG; ریلو، آر. رابینسون، دی.تی. شمال، م. رند، دبلیو. مدلهای فرآیند و داده فضایی: به سوی ادغام مدلهای مبتنی بر عامل و GIS. جی. جئوگر. سیستم 2005 ، 71 ، 25-47. [ Google Scholar ] [ CrossRef ]
- پیجانوفسکی، ق.م. پیتادیا، اس. شلیتو، BA; الکساندریدیس، ک. کالیبراسیون یک مدل تغییر شهری مبتنی بر شبکه عصبی برای دو منطقه شهری در غرب میانه بالایی ایالات متحده. بین المللی جی. جئوگر. Inf. علمی 2005 ، 192 ، 197-215. [ Google Scholar ] [ CrossRef ]
- طیبی، ع. پری، کامپیوتر; طیبی، ق پیشبینی گسترش یک مرز شهری با استفاده از رگرسیون لجستیک فضایی و روالهای شطرنجی-بردار ترکیبی با سنجش از دور و GIS. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 639-659. [ Google Scholar ] [ CrossRef ]
- دوان، AM; یاماگوچی، ی. تغییر کاربری زمین و پوشش زمین در داکای بزرگ، بنگلادش: استفاده از سنجش از دور برای ترویج شهرنشینی پایدار. Appl. Geogr. 2009 ، 29 ، 390-401. [ Google Scholar ] [ CrossRef ]
- محبوب، م. عاطف، من. اقبال، جی. سنجش از دور و کاربردهای GIS برای ارزیابی گسترش شهری در کراچی، پاکستان. علمی فنی توسعه دهنده 2015 ، 34 ، 179-188. [ Google Scholar ] [ CrossRef ]
- وو، کیو. لی، اچ. وانگ، آر. پائولوسن، جی. سلام.؛ وانگ، ام. وانگ، بی. Wang, Z. نظارت و پیشبینی تغییر کاربری زمین در پکن با استفاده از سنجش از دور و GIS. Landsc. طرح شهری. 2006 ، 78 ، 322-333. [ Google Scholar ] [ CrossRef ]
- الشریف، AA; پرادان، بی. تحلیل پراکندگی شهری شهر متروپولیتن طرابلس (لیبی) با استفاده از داده های سنجش از دور و مدل رگرسیون لجستیک چند متغیره. J. شرکت هندی Remote Sens. 2014 ، 42 ، 149-163. [ Google Scholar ] [ CrossRef ]
- استور، ر. Kangas, J. یکپارچه سازی ارزیابی چند معیاره فضایی و دانش تخصصی برای مدل سازی مناسب زیستگاه مبتنی بر GIS. Landsc. طرح شهری. 2001 ، 55 ، 79-93. [ Google Scholar ] [ CrossRef ]
- وو، اف. Webster, CJ شبیه سازی توسعه زمین از طریق ادغام اتوماتای سلولی و ارزیابی چند معیاره. محیط زیست طرح. B طرح. دس 1998 ، 25 ، 103-126. [ Google Scholar ] [ CrossRef ]
- Wu, F. کالیبراسیون اتوماتای سلولی تصادفی: کاربرد برای تبدیل زمین روستایی به شهری. بین المللی جی. جئوگر. Inf. علمی 2002 ، 16 ، 795-818. [ Google Scholar ] [ CrossRef ]
- ریچیولی، اف. ال اسمار، تی. ال اسمار، جی پی؛ Fratini, R. استفاده از اتوماتای سلولی در مطالعه متغیرهای دخیل در تغییرات کاربری زمین. محیط زیست نظارت کنید. ارزیابی کنید. 2013 ، 185 ، 5361-5374. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- پیجانوفسکی، ق.م. براون، DG; شلیتو، BA; Manik، GA استفاده از شبکه های عصبی و GIS برای پیش بینی تغییرات کاربری زمین: یک مدل تبدیل زمین. محاسبه کنید. محیط زیست سیستم شهری 2002 ، 266 ، 553-575. [ Google Scholar ] [ CrossRef ]
- طیبی، ع. پیجانوفسکی، ق.م. طیبی، ق، مدل مرز رشد شهری با استفاده از شبکه های عصبی، GIS و پارامترسازی شعاعی: کاربرد در تهران، ایران. Landsc. طرح شهری. 2011 ، 100 ، 35-44. [ Google Scholar ] [ CrossRef ]
- طیبی، ع. Pijanowski، BC مدلسازی چندین تغییر کاربری زمین با استفاده از ANN، CART و MARS: مقایسه معاوضه در خوبی تناسب و قدرت توضیحی ابزارهای دادهکاوی. بین المللی J. Appl. زمین Obs. Geoinf. 2014 ، 28 ، 102-116. [ Google Scholar ] [ CrossRef ]
- طیبی، ع. پیجانوفسکی، ق.م. لیندرمن، ام. Gratton, C. مقایسه سه مدل پارامتری جهانی و ناپارامتریک محلی برای شبیهسازی تغییر کاربری اراضی در مناطق مختلف جهان. محیط زیست مدل. نرم افزار 2014 ، 59 ، 202-221. [ Google Scholar ] [ CrossRef ]
- گرکوسیس، جی. مانتوس، پی. Photis، YN مدلسازی تکامل شهری با استفاده از شبکه های عصبی، منطق فازی و GIS: مورد منطقه شهری آتن. شهرها 2013 ، 30 ، 193-203. [ Google Scholar ] [ CrossRef ]
- ریچیولی، اف. ال اسمار، تی. ال اسمار، جی پی؛ فاگاراتزی، سی. Casini، L. شبکه عصبی مصنوعی برای مناطق چند منظوره. محیط زیست نظارت کنید. ارزیابی کنید. 2016 . [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تریانتاکونستانتیس، دی. استاتاکیس، دی. پیشبینی رشد شهری در آتن، یونان، با استفاده از شبکههای عصبی مصنوعی. بین المللی J. Civ. محیط زیست ساختار. ساختن. معمار. مهندس 2015 ، 9 ، 234-238. [ Google Scholar ]
- هوانگ، بی. زی، سی. تای، آر. Wu, B. مدلسازی تغییر کاربری زمین با استفاده از ماشینهای بردار پشتیبان نامتعادل. محیط زیست طرح. B Plan Des. 2009 ، 36 ، 398-416. [ Google Scholar ] [ CrossRef ]
- تانگ، جی. وانگ، ال. Yao, Z. تجزیه و تحلیل تغییر منظر شهری فضایی-زمانی با استفاده از مدل زنجیره مارکوف و یک الگوریتم ژنتیک اصلاح شده. بین المللی J. Remote Sens. 2007 , 28 , 3255-3271. [ Google Scholar ] [ CrossRef ]
- Batty, M. Cities and Complexity: Understanding Cities with Cellular Automata, Agent-based Models, and Fractals . انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 2007. [ Google Scholar ]
- فنگ، ی. لیو، ی. تانگ، ایکس. لیو، ام. دنگ، اس. مدلسازی رشد شهری پویا با استفاده از اتوماتای سلولی و قوانین بهینهسازی ازدحام ذرات. Landsc. طرح شهری. 2011 ، 102 ، 188-196. [ Google Scholar ] [ CrossRef ]
- کلارک، کی سی; Gaydos، LJ اتصال شل یک مدل خودکار سلولی و GIS: پیشبینی رشد شهری بلندمدت برای سانفرانسیسکو و واشنگتن/بالتیمور. بین المللی جی. جئوگر. Inf. علمی 1998 ، 127 ، 699-714. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- شفیع زاده، م. Helbich، M. فرآیندهای شهرنشینی فضایی و زمانی در کلان شهر بمبئی، هند: مدل رشد شهری زنجیرهای مارکوف-اتوماتای سلولی. Appl. Geogr. 2013 ، 40 ، 140-149. [ Google Scholar ] [ CrossRef ]
- ارسنجانی، ج. هلبیچ، ام. کاینز، دبلیو. Boloorani، AD یکپارچه سازی رگرسیون لجستیک، زنجیره مارکوف و مدل های اتوماتای سلولی برای شبیه سازی گسترش شهری. بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 21 ، 265-275. [ Google Scholar ] [ CrossRef ]
- گوشه، RJ; دوان، AM; چکما، س. پایش و پیشبینی تغییر کاربری و پوشش زمین (LULC). در کلان شهر داکا – دیدگاه های جغرافیایی در شهرسازی، محیط زیست و سلامت ؛ Dewan، AM، Corner، RJ، Eds. Springer Geography: برلین، آلمان، 2014; صص 75-97. [ Google Scholar ]
- الخضر، س. وانگ، جی. Shan, J. Fuzzy مدلسازی رشد شهری اتوماتای سلولی را با استفاده از تصاویر ماهوارهای چند زمانی هدایت کرد. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 1271-1293. [ Google Scholar ] [ CrossRef ]
- لی، ایکس. بله، اتوماتای سلولی مبتنی بر شبکه عصبی AGO برای شبیه سازی چندین تغییر کاربری زمین با استفاده از GIS. بین المللی جی. جئوگر. Inf. علمی 2002 ، 164 ، 323-343. [ Google Scholar ] [ CrossRef ]
- آذری، م. طیبی، ع. هلبیچ، ام. ریوشتی، کارشناسی ارشد ادغام اتوماتای سلولی، شبکه عصبی مصنوعی و نظریه مجموعه فازی برای شبیهسازی باغهای در معرض تهدید: کاربرد در مراغه، ایران. GISci. Remote Sens. 2016 , 53 , 183-205. [ Google Scholar ] [ CrossRef ]
- سامارژیچ-پتروویچ، م. دراگیچویچ، اس. کوواچویچ، م. باجات، ب. مدلسازی تغییرات کاربری اراضی شهری با استفاده از ماشینهای بردار پشتیبان. ترانس. GIS 2016 ، 20 ، 718-734. [ Google Scholar ] [ CrossRef ]
- لیو، ی. فنگ، ی. Pontius، RG شبیهسازی فضایی صریح رشد شهری از طریق الگوریتم ژنتیک خودسازگار و مدلسازی اتوماتای سلولی. Land 2014 , 3 , 719-738. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، ایکس. لیو، ال. او، جی. Ai, B. رویکردی از پایین به بالا برای کشف قوانین انتقال اتوماتای سلولی با استفاده از هوش مورچه. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 1247-1269. [ Google Scholar ] [ CrossRef ]
- کائو، ام. تانگ، GA; شن، Q. Wang, Y. کشف جدید قوانین انتقال برای اتوماتای سلولی با استفاده از الگوریتم جستجوی فاخته. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 806-824. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. لی، ایکس. بله، پیش از این؛ او، جی. تائو، جی. کشف قوانین انتقال برای اتوماتای سلولی جغرافیایی با استفاده از بهینهسازی کلونی مورچهها. علمی چین سر. D Earth Sci. 2007 ، 50 ، 1578-1588. [ Google Scholar ] [ CrossRef ]
- یانگ، جی. تانگ، GA; کائو، ام. Zhu, R. روشی هوشمند برای کشف قوانین انتقال برای اتوماتای سلولی با استفاده از بهینهسازی کلونی زنبور عسل. بین المللی جی. جئوگر. Inf. علمی 2013 ، 2710 ، 1849-1864. [ Google Scholar ] [ CrossRef ]
- لیائو، جی. تانگ، ال. شائو، جی. کیو، کیو. وانگ، سی. ژنگ، اس. Su، X. یک رویکرد اتوماتای سلولی فروپاشی همسایه برای شبیه سازی گسترش شهری بر اساس هوش ازدحام ذرات. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 720-738. [ Google Scholar ] [ CrossRef ]
- Karaboga, D. یک ایده بر اساس ازدحام زنبور عسل برای بهینه سازی عددی . گروه مهندسی کامپیوتر، دانشگاه Erciyes: Kayseri، ترکیه، 2005. [ Google Scholar ]
- ژانگ، سی. اویانگ، دی. نینگ، جی. رویکرد کلونی زنبورهای مصنوعی برای خوشهبندی. انقضا سیستم Appl. 2010 ، 37 ، 4761-4767. [ Google Scholar ] [ CrossRef ]
- آکای، بی. Karaboga, D. الگوریتم کلونی زنبورهای مصنوعی اصلاح شده برای بهینه سازی پارامتر واقعی. Inf. علمی 2012 ، 192 ، 120-142. [ Google Scholar ] [ CrossRef ]
- کارابوگا، دی. گورکملی، بی. اوزتورک، سی. Karaboga, N. یک بررسی جامع: الگوریتم ABC کلونی زنبورهای مصنوعی و کاربردها. آرتیف. هوشمند Rev. 2014 , 421 , 21-57. [ Google Scholar ] [ CrossRef ]
- Bolaji, AL; خادر، AT; البطار، م. Awadallah، MA الگوریتم کلونی زنبورهای مصنوعی، انواع و کاربردهای آن: یک بررسی. جی. تئور. Appl. Inf. فنی 2013 ، 47 ، 434-459. [ Google Scholar ]
- لیو، ی. لیو، دی. لیو، ی. او، جی. جیائو، ال. چن، ی. هنگ، X. تخصیص فضایی استفاده از زمین روستایی در منطقه تپهای لس نیمه خشک در چین: با استفاده از مدل بهینهسازی ازدحام ذرات مجهز به تکنیکهای بهینهسازی چند هدفه. علمی علوم زمین چین 2012 ، 55 ، 1166-1177. [ Google Scholar ] [ CrossRef ]
- اطلاعات سرشماری قابل دسترس آنلاین: http://www.amar.org.ir (در تاریخ 20 آوریل 2012).
- سانته، آی. گارسیا، AM; میراندا، دی. Crecente، R. مدلهای اتوماتای سلولی برای شبیهسازی فرآیندهای شهری دنیای واقعی: بررسی و تحلیل. Landsc. طرح شهری. 2010 ، 96 ، 108-122. [ Google Scholar ] [ CrossRef ]
- وایت، آر. انگلن، جی. اولجی، I. استفاده از اتوماتای سلولی محدود برای مدلسازی با وضوح بالا پویایی کاربری زمین شهری. محیط زیست طرح. B طرح. دس 1997 ، 24 ، 323-343. [ Google Scholar ] [ CrossRef ]
- چن، ی. لی، ایکس. لیو، ایکس. Ai, B. مدلسازی پویایی کاربری زمین شهری در یک شهر در حال توسعه سریع با استفاده از خودکار سلولی لجستیک اصلاحشده با استراتژی شبیهسازی مبتنی بر پچ. بین المللی جی. جئوگر. Inf. علمی 2014 ، 282 ، 234-255. [ Google Scholar ] [ CrossRef ]
- کائو، ک. هوانگ، بی. لی، ام. لی، دبلیو. کالیبراسیون یک مدل اتوماتای سلولی برای درک تبدیل زمین روستایی به شهری: یک رویکرد بهینهسازی چند هدفه مبتنی بر جلوی پارتو. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 1028-1046. [ Google Scholar ] [ CrossRef ]
- لی، ایکس. بله، AGO منطقه بندی زمین برای حفاظت کشاورزی با ادغام سنجش از دور، GIS و اتوماتای سلولی. فتوگرام مهندس Remote Sens. 2001 , 67 , 471-477. [ Google Scholar ]
- لو، سی. وو، ی. شن، Q. وانگ، اچ. نیروی محرکه رشد شهری و برنامه ریزی منطقه ای: مطالعه موردی استان گوانگدونگ چین. Habitat Int. 2013 ، 40 ، 35-41. [ Google Scholar ] [ CrossRef ]
- بنداری، ع.ک. کومار، ا. سینگ، GK اصلاح شده بر اساس آستانه چندسطحی کارآمد محاسباتی برای تقسیم بندی تصاویر ماهواره ای با استفاده از توابع کاپور، اوتسو و تسالیس. انقضا سیستم Appl. 2015 ، 42 ، 1573-1601. [ Google Scholar ] [ CrossRef ]
- لی، جی. نیو، پ. Xiao, X. توسعه و بررسی الگوریتم کلونی زنبورهای مصنوعی کارآمد برای بهینهسازی تابع عددی. Appl. نرم افزار محاسبه کنید. 2012 ، 12 ، 320-332. [ Google Scholar ] [ CrossRef ]
- بیسواس، س. چترجی، ا. گوسوامی، SK یک الگوریتم کلنی زنبورهای مصنوعی-حداقل مربع برای حل مسائل تخمین هارمونیک. Appl. نرم افزار محاسبه کنید. 2013 ، 135 ، 2343-2355. [ Google Scholar ] [ CrossRef ]
- آلاتاس، ب. الگوریتمهای کلونی زنبورهای آشوبزده برای بهینهسازی عددی جهانی. انقضا سیستم Appl. 2010 ، 37 ، 5682-5687. [ Google Scholar ] [ CrossRef ]
- علیزادگان، ع. اسدی، ب. احمدپور، م. دو نسخه اصلاح شده الگوریتم کلونی زنبورهای مصنوعی. Appl. ریاضی. محاسبه کنید. 2013 ، 225 ، 601-609. [ Google Scholar ] [ CrossRef ]
- کندی، جی. ابرهارت، بهینه سازی ازدحام ذرات RC. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد شبکه های عصبی، پرت، استرالیا، 27 نوامبر تا 1 دسامبر 1995. جلد 5، ص 1942–1948.
- آلاتاس، بی. Akin, E. الگوریتم بهینهسازی ازدحام ذرات با کدگذاری آشوبزده و کاربردهای آن. فراکتال های Chaos Solitons 2009 ، 41 ، 939-950. [ Google Scholar ] [ CrossRef ]
- جیانگ، اچ. Kwong، CK; چن، ز. بهینهسازی ازدحام ذرات Ysim، YC Chaos و رویکردهای مدلسازی فازی T-S برای کنترل پیشبینی محدود. انقضا سیستم Appl. 2012 ، 39 ، 194-201. [ Google Scholar ] [ CrossRef ]
- صادق پور، م. سالاریه، ح. وثوقی، غ. Alasty، A. کنترل چند متغیره آشوب با استفاده از کنترل حداقل آنتروپی مبتنی بر PSO. اشتراک. علمی غیر خطی عدد. شبیه سازی 2011 ، 16 ، 2397-2404. [ Google Scholar ] [ CrossRef ]
- Pontius, RG, Jr. خطای کمی سازی در مقابل خطای مکان در مقایسه نقشه های طبقه بندی شده. فتوگرام مهندس Remote Sens. 2000 , 66 , 1011–1016. [ Google Scholar ]
- پونتیوس، آر جی، جونیور؛ کرنل، جی دی. هال، کالیفرنیا مدلسازی الگوی فضایی تغییر کاربری زمین با GEOMOD2: کاربرد و اعتبارسنجی برای کاستاریکا. کشاورزی اکوسیستم. محیط زیست 2001 ، 851 ، 191-203. [ Google Scholar ] [ CrossRef ]
- پونتیوس، آر جی، جونیور؛ Schneider، LC اعتبار مدل تغییر پوشش زمین با روش ROC برای حوضه آبخیز ایپسویچ، ماساچوست، ایالات متحده آمریکا. کشاورزی اکوسیستم. محیط زیست 2001 ، 851 ، 239-248. [ Google Scholar ] [ CrossRef ]
- پونتیوس، آر جی، جونیور؛ Si، K. مشخصه عملیاتی کل برای اندازه گیری توانایی تشخیصی برای چند آستانه. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 570-583. [ Google Scholar ] [ CrossRef ]
- احمد، SJ; براملی، جی. Verburg، PH عوامل کلیدی محرک موثر بر رشد شهری: مدلسازی آماری فضایی با سرنخها. در کلان شهر داکا – دیدگاه های جغرافیایی در شهرسازی، محیط زیست و سلامت ؛ Dewan، AM، Corner، RJ، Eds. Springer Geography: برلین، آلمان، 2014; صص 123-145. [ Google Scholar ]



© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر