1. معرفی
فن آوری وب 2.0 تعامل بین سرورها و مشتریان را تسهیل می کند [ 1 ]. به طور خاص، نه تنها افراد می توانند داده ها را از صفحات وب وب 2.0 دانلود کنند، بلکه می توانند به پایگاه داده دسترسی پیدا کرده و رکوردهای آن را اصلاح کنند. در نتیجه چنین توسعه ای، راه های دستیابی به داده های جغرافیایی دیگر به منابع مجاز سنتی محدود نمی شود. داده ها می تواند از اطلاعات جغرافیایی داوطلبانه (VGI) باشد که به طور داوطلبانه توسط تعداد زیادی از شهروندان عادی با استفاده از ابزارهای شبکه ارائه می شود [ 2 ]]. علاوه بر راحتی در توزیع و دسترسی به اطلاعات، جمع آوری داده های جغرافیایی با دستگاه های نقشه برداری غیرحرفه ای مانند گیرنده های GPS در تلفن های هوشمند یا سیستم های ناوبری خودرو نیز آسان تر است. از نظر فنی، همه شهروندان را می توان به عنوان حسگر [ 2 ] در نظر گرفت و در نتیجه منابع اطلاعات جغرافیایی می تواند به اندازه افراد جمع آوری کننده آن متنوع و پیچیده باشد. در این شرایط، مشارکت کنندگان داده آماتور و متعدد هستند. گودچایلد و گلنونا [ 3] پیشنهاد کرد که اصطلاحات دادههای جغرافیایی جمعسپاری تقریباً برابر با VGI است، و اولی ممکن است برای توصیف اثربخشی و دقت بهدستآمده توسط کاربران معمولی بدون تخصص با استفاده از این رویکرد، کمی مناسبتر باشد. پتانسیل عظیم این داده های جمع سپاری تولید شده به طور داوطلبانه به طور فزاینده ای مورد توجه قرار می گیرد. اعتقاد بر این است که VGI باید به منبعی ضروری برای داده های جغرافیایی در عصر آینده وب 3.0 تبدیل شود. این نه تنها پایگاههای اطلاعاتی و آرشیوهای جغرافیایی موجود را گسترش، تکمیل و بهبود میبخشد، بلکه اشکال جدیدی از اطلاعات جغرافیایی را جمعآوری و تولید میکند که الگوهای مکانی-زمانی را نشان میدهد و به شیوههای اجتماعی و اقتصادی کمک میکند. در نتیجه، تحقیق در مورد کاربردهای بالقوه VGI ضروری و قابل توجه است.
OpenStreetMap (OSM) یکی از امیدوارکنندهترین پروژهها برای ارائه دادههای crowdsourced است. هدف آن ایجاد یک نقشه رایگان قابل ویرایش از جهان از طریق همکاری بین افراد است [ 4 ]. داده های OSM موجود شامل جاده ها، مرزهای اداری، چند ضلعی های طبیعی، نقاط دیدنی و سایر ویژگی ها است. کیفیت داده های OSM (جاده) توسط بسیاری از محققان تجزیه و تحلیل شده است. موضوعات مرتبط در مورد اعتبار داده های جمع سپاری، از جمله داده های OSM، توسط Flanagin و Metzger [ 5 ] و Ying و همکاران مورد بحث قرار گرفت. [ 6 ]. آنها خاطرنشان کردند که داده های جغرافیایی ارائه شده توسط افراد غیر متخصص نیز معتبر است. هاکلی [ 7] ادعا کرد که داده های OSM، در مقایسه با پایگاه داده Ordnance Survey (OS)، بیش از 80 درصد در لندن همپوشانی دارند و تنها 4 درصد از خطوط فاقد ویژگی های کامل هستند. Ather [ 8 ] به این نتیجه رسید که دقت موقعیتی داده های OSM در مقایسه با لایه ITN OS MasterMap در انگلستان بسیار خوب است. Girres و Touya [ 9 ] کیفیت داده های OSM را در فرانسه ارزیابی کردند. در حالی که مزایای خاصی از داده های OSM را نشان دادند، آنها همچنین اشاره کردند که ناهمگونی ذاتی آن کاربردهای بالقوه آنها را بسیار محدود می کند. Zielstra و Zipf [ 10 ] ارزیابی خود را بر روی داده های OSM آلمان گزارش کردند که با دقت موقعیت نسبی و کامل بودن نسبی ارزیابی شد. آنها نتایج مشابهی را با Girres و Touya بدست آوردند [ 9]. به طور مشابه، لودویگ و همکاران. [ 11 ] دریافتند که 73٪ از جاده های OSM در آلمان در فاصله 5 متری از جاده های مرجع ارائه شده توسط NavTeq قرار دارند. مطالعه مشابهی در مورد ارزیابی کیفیت نیز در یونان توسط کونادی [ 12 ] تکمیل شد، که به این نتیجه رسید که دادههای OSM را میتوان با قابلیت اطمینان برای چندین هدف نقشهبرداری استفاده کرد، زیرا از دقت موضوعی و موقعیتی خوبی برخوردار بود. هلبیچ و همکاران [ 13] کار مشابهی را با مقایسه داده های OSM و داده های Tele Atlas با نقشه برداری میدانی در آلمان انجام داد. آنها دریافتند که داده های OSM و Tele Atlas برای برنامه های نقشه برداری در مقیاس کوچک و متوسط به اندازه کافی خوب هستند. آنها همچنین نشان دادند که داده های Tele Atlas دارای اعوجاج کمتری نسبت به داده های OSM هستند و کیفیت داده های OSM ناهمگن است. اولین مطالعه در مونیخ آلمان توسط فن و همکاران ارائه شد. [ 14 ] در مورد کیفیت داده های ردپای ساختمان در OSM با استفاده از چهار معیار ( به عنوان مثال ، کامل بودن، دقت معنایی، دقت موقعیت و صحت شکل) با ارجاع به پایگاه داده توپوگرافی و کارتوگرافی معتبر آلمانی ATKIS. از نظر ارزیابی کلی کیفیت، مونی و همکاران. [ 15] معیارهای کیفیت داده های OSM را بدون استفاده از منبع داده مرجع بررسی کرد. اخیراً بارون و همکاران. [ 16 ] چارچوبی را ارائه کرد که شامل بیش از 25 روش مختلف برای تحلیل کیفیت دادههای OSM بر اساس OSM-Full-History-Dump بود. مطالعاتی با تمرکز بر استفاده از داده های OSM نیز در حال انجام است. خدمات دسترسی آنلاین بر اساس داده های جاده OSM با ایجاد یک شبکه جاده با روابط توپولوژیکی صحیح [ 17 ] محقق شد. Over et al. [ 18ویژگیهای جاده OSM را پس از مثلثسازی در یک مدل ارتفاعی دیجیتال (DEM) ادغام کرد و اصلاح خط DEM تطبیقی را برای تولید مدلهای سهبعدی انجام داد. این کار نشان داد که OSM پتانسیل بالایی برای ایجاد مدلهای شهر مجازی دارد، اما هنوز هم در دقت و کاملی مطلق فضایی برای پیشرفت دارد. Mondzech و Sester [ 19 ] یک شبکه مسیر برای پیاده سازی ناوبری عابر پیاده با استفاده از داده های OSM ایجاد کردند و ادعا کردند که مناطق شهری یا روستایی ممکن است نتایج بسیار متفاوتی داشته باشند. پورعبدالله و همکاران [ 20 ] با موفقیت ویژگیهای جاده OSM، از جمله نام و کد مرجع، را با جادههای Ordnance Survey ترکیب کرد و جادههای جدید را با ویژگیها به سمت یک OSM معتبر علامتگذاری کرد. ژانگ و همکاران [ 21] یکی از چند آزمایش را با استفاده از داده های OSM در چین انجام داد که به موجب آن داده های OSM را با پایگاه داده تجاری تطبیق دادند. دلیل عدم تحقیق با استفاده از داده های OSM در چین ممکن است این باشد که کامل بودن جاده های OSM در آن زمان در چین در مقایسه با اروپا ضعیف بود. با این حال، کمیت و کیفیت آن با افزایش تعداد کاربران ثبتشده چینی OSM روز به روز در حال افزایش است و برنامههای کاربردی آن را معنادارتر و سودمندتر میکند. اخیراً، Neis و Zielstra [ 22 ] یک بررسی و دیدگاه های خود را در مورد پتانسیل داده های OSM ارائه کردند.
با در دسترس قرار گرفتن منابع داده جدید، ایجاد نقشه های راه به روز شده از منابع مختلف برای نیازهای خاص ضروری است [ 20 ، 23 ]. ترکیب نقشه برای ادغام نقشه های ناهمگن که در همان منطقه همپوشانی دارند، اعمال می شود. برای بدست آوردن یک نقشه راه به موقع و مقرون به صرفه برای برخی از برنامه ها مانند خدمات ناوبری و مکان یابی، ما نقشه راه ناوبری را با داده های جاده OSM با سه روش اصلی ترکیب می کنیم: تطبیق جاده، تشخیص تغییر و به روز رسانی. چین به عنوان بزرگترین کشور در حال توسعه، شاهد نرخ بسیار بالای جاده سازی در مقایسه با کشورهای توسعه یافته است. یافتن تغییرات، بهویژه جادههای تازهساخته و بهروزرسانی پایگاه داده بهموقع و مؤثر، یک نیاز ضروری است [ 24 ]]. به عنوان یکی از مهم ترین رویه ها در ترکیب نقشه، تطبیق ویژگی (نقطه، چند خط و چندضلعی) با هدف ایجاد پیوند بین یک شیء مشابه در دنیای واقعی از نقشه های مختلف [ 25 ، 26 ، 27 ] است. روش رشد بافر در تطبیق جاده محبوب است و تعیین شعاع بافر کلیدی برای نتیجه تطبیق است [ 28 ]. از آنجایی که کیفیت ثبت بین جاده های تطبیق بالقوه ممکن است از ناحیه ای به منطقه دیگر متفاوت باشد، توسعه یک روش بافر تطبیقی برای به دست آوردن شعاع بافر دقیق برای تطبیق جاده ضروری است.
نقشه راه (پایه) در چین یک لایه موضوعی از سیستم اطلاعات جغرافیایی بنیاد ملی (NFGIS) در مقیاس 1:10000 است. از طریق گردآوری با اشاره به تصاویر تازه به دست آمده و کار میدانی، این نقشه راه به طور معمول به یک نقشه ناوبری به روز می شود. با این حال، به دلیل وضوح تصویر محدود یا انسداد ناشی از درختان، ساختمانهای بلند و ابر و غیره ، هنوز جادههای گمشده در طول تدوین وجود دارد .همچنین، فرکانس به روز رسانی می تواند کم باشد، به عنوان مثال، یک بار در سال در مثال نقشه راه 1:10000 در استان هوبی. علاوه بر این، به روز رسانی اغلب بسیار پرهزینه است زیرا تعداد زیادی خدمه برای انجام نقشه برداری میدانی مورد نیاز است. بنابراین کار ما در این مقاله راهحلی ساده و در عین حال مؤثر برای تشخیص خودکار تغییرات و بهروزرسانی نقشههای راه با استفاده از دادههای OSM ارائه میکند. از دادههای OSM بهره میبرد و یک روش پویا تشخیص تغییر نقشه راه و بهروزرسانی را برای ایجاد یک نقشه راه کامل و جدید ارائه میکند. ابتدا نقشه های راه را به عنوان جاده های مرجع در نظر می گیریم و آنها را با داده های OSM پس از تغییرات توپولوژی آن مقایسه می کنیم. سپس، تمام جادهها در دادههای OSM توسط آنالیز بافر مترقی پیشنهادی ما پیدا میشوند، که از طریق آن بافر بهینه تعیین میشود. جاده های جدید شناسایی شده، چه به تازگی نقشه برداری شده یا ساخته شده اند، سپس از طریق ترکیب با جاده های مرجع ترکیب می شوند و یک نقشه راه مرجع به روز شده را به دست می دهند. برای این مطالعه از جاده های مرجع و داده های OSM شهر ووهان در چین استفاده شده است. بر اساس این مطالعه و ارزیابی گسترده، یافتههای خود را نتیجهگیری میکنیم و توصیههایی برای تلاشهای آتی ارائه میکنیم. این کار می تواند در کاهش چشمگیر سرمایه گذاری انسانی و مالی برای به روز رسانی نقشه راه برای دولت و صنعت اهمیت داشته باشد.
2. روش شناسی
به منظور به روز رسانی نقشه راه مرجع با استفاده از داده های OSM، ابتدا باید دو مجموعه داده تقریباً مطابقت داده شوند. محبوب ترین روش، فناوری ترکیب نقشه است که از ترکیب هندسی، ترکیب توپولوژیکی و ترکیب معنایی تشکیل شده است [ 29 ]. یک کاربرد اولیه از ترکیب نقشه با استفاده از یک الگوریتم لایهبندی لاستیکی تکراری در پروژهای انجام شد که TIGER (رمزگذاری و ارجاع جغرافیایی یکپارچه توپولوژیکی) از اداره سرشماری ایالات متحده و پایگاه داده DLG (گراف خط دیجیتال) از سازمان زمینشناسی ایالات متحده را ادغام کرد. 1983 [ 25 ]، بیشتر برای تطابق 1:1. گابای و دویتشر [ 30] ادعا کرد که توپولوژی خطوط باید برای دستیابی به تطابق m:n استفاده شود. بر اساس روش رشد بافر، والتر [ 31 ] از شباهت زوایا، طول ها و شکل جاده ها برای مطابقت با داده های مدل مختلف استفاده کرد و آستانه تشابه با بررسی های آماری محاسبه می شود. کاب و همکاران [ 23 ] یک سیستم خبره ارائه کرد و اطلاعات غیر مکانی را به محاسبه شباهت اضافه کرد. یک الگوریتم خوشه نقطه ای به کمک تعامل دستی توسط Xiong و Sperling [ 27 ] برای تعیین جفت های تطبیق استفاده شد. گوسلن [ 32 ] و ولز [ 26] از نزدیکترین نقطه تکراری (ICP) برای مطابقت دادن نقاط و سپس اتصال گره های مربوطه برای به دست آوردن خط جاده منطبق استفاده کرد. چهار ابزار نرمافزاری (Conflex، JCS Conflation Suite، MapMerger و TotalFit) برای تطبیق جادهها از دو مجموعه داده و ایجاد یک مجموعه داده ادغام شده توسعه داده شد.
ما ایده روش تجزیه و تحلیل بافر را اتخاذ می کنیم. این به این دلیل است که دادههای OSM و نقشههای راه مرجع مربوطه از نظر جغرافیایی به یکدیگر نزدیک هستند زیرا جادههای OSM برگرفته از GPS یا جادههای OSM برگرفته از تصویر دارای کیفیت موقعیت مناسبی هستند و دادههای ملی NFGIS تحت مشخصات 1 تولید شدهاند: 10000 نقشه توپوگرافی (5 متر در پلان سنجی). علاوه بر این، همانطور که ناسازگاری توپولوژیکی بین دو مجموعه داده را پاک کردیم، یک تحلیل بافر ساده برای این منظور کافی است. برای پیاده سازی، ابتدا جاده های مرجع را بافر می کنیم و یک تحلیل تقاطع برای یافتن جاده هایی که فقط در داده های OSM وجود دارند دنبال می شود. این جاده ها به عنوان جاده های جدید بالقوه در نظر گرفته می شوند زیرا داده های OSM بیشتر از جاده های مرجع به روز می شوند. از آنجایی که نتایج تحت تأثیر شعاع بافر قرار می گیرند، شعاع بافر بهینه را با بررسی نتایج جاده های جدید تحت شعاع های بافر مختلف محاسبه می کنیم. در مرحله نهایی، جاده های تازه یافت شده از نظر ترکیب هندسی، توپولوژیکی و معنایی در جاده های مرجع ادغام می شوند.
2.1. بافر و تجزیه و تحلیل متقاطع
بافر نشان دهنده افست حول ویژگی های جغرافیایی است. همانطور که در شکل 1 نشان داده شده است ، جاده های مرجع ( شکل 1 a، مشکی) به ( شکل 1 b، آبی) بافر می شوند که از یک مستطیل تقریبی در نقاط راه پیوسته و دو نیم دایره در نقاط انتهایی ناپیوسته تشکیل شده است. یک تحلیل متقاطع ( شکل 1 ج) بین چند ضلعی بافر و جاده های OSM ( شکل 1 ج، قرمز) برای تعیین جاده های جدید احتمالی اجرا می شود. اگر یک جاده OSM به طور کامل در چند ضلعی بافر قرار گیرد، به عنوان جاده بدون تغییر در نظر گرفته می شود. با این حال، اگر بخشی از آن در داخل یا کاملاً خارج از چند ضلعی باشد، به عنوان یک جاده جدید در نظر گرفته می شود ( شکل 1 d، بنفش).
شکل 1. تجزیه و تحلیل بافر برای یافتن جاده های جدید ( a ) مرجع; ( ب ) مرجع باف. ( ج ) جاده های OSM در داخل بافر به رنگ قرمز. ( د ) جاده های جدید را به رنگ بنفش شناسایی کرد.
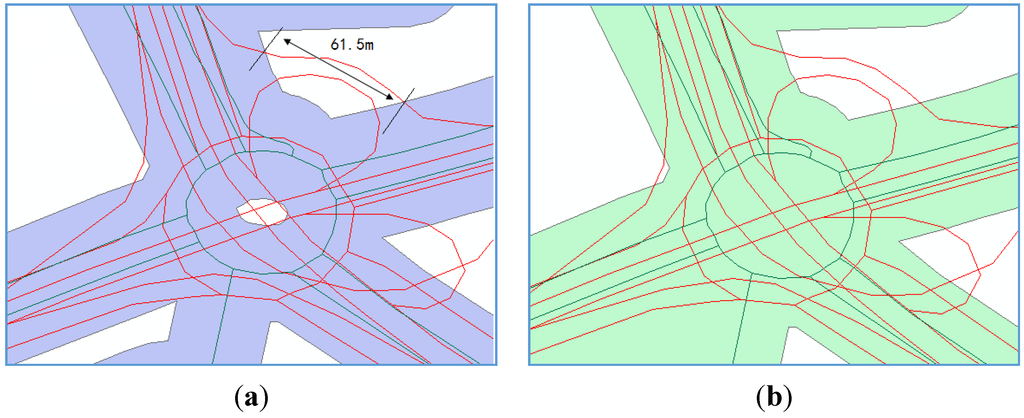
با این حال، برای تقاطع های جاده پیچیده، مانند دوربرگردان [ 33 ]، تجزیه و تحلیل بافر ممکن است به سوراخی در مرکز منجر شود. در شکل 2 ، جاده های OSM که از سوراخ عبور می کنند ممکن است پس از تجزیه و تحلیل تقاطع به عنوان جاده های جدید اشتباه گرفته شوند. بنابراین چنین حفره هایی باید پر شوند تا از قضاوت نادرست احتمالی جلوگیری شود. این امر با تجمیع چند ضلعی های بافر در فاصله معینی از یکدیگر در چند ضلعی های جدید انجام می شود.
شکل 2. بافرهای ( a ) (به رنگ آبی) در یک دوربرگردان و تجمع آنها ( b ) (به رنگ سبز) برای پر کردن سوراخ در تجزیه و تحلیل تقاطع. جاده های OSM قرمز و جاده های مرجع سبز هستند.
2.2. بافر پیشرونده
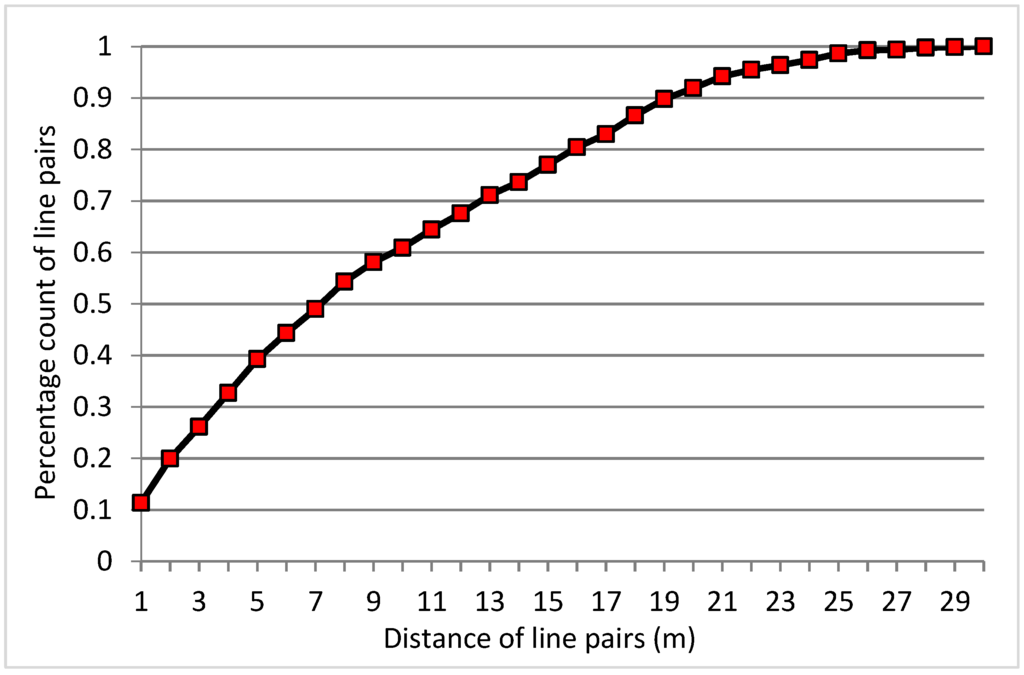
از آنجایی که شعاع بافر نقش کلیدی در تعیین جاده های جدید ایفا می کند، باید یک رویکرد پیش رونده اجرا شود، که برای آن یک راه حل دو مرحله ای پیشنهاد می کنیم. ابتدا محدوده شعاع بافر را تعیین می کنیم. جاده های OSM که به صورت خطوط منفرد نشان داده می شوند باید در چند ضلعی قرار بگیرند که خطوط مرکزی جاده مرجع را با عرضشان بافر می کنند. مجموعه داده مرجع در مطالعه ما از خط مرکزی یک جاده یک جهته برای نشان دادن جاده استفاده می کند، یعنی یک خط برای یک خیابان یک طرفه. دو خط با شکل مشابه در یک فاصله مشخص نشان دهنده یک خیابان دو طرفه است. هنگام تصمیم گیری در مورد جاده های بدون تغییر در دو مجموعه داده یک منطقه، حداکثر عرض جاده برای انتخاب محدوده شعاع بافر مورد نیاز است. عرض جاده در شهرهای مختلف متفاوت است. مثلا، ووهان عمدتا دارای چهار خط ترافیک در یک جهت با عرض حدود 3.75 متر و یک خط دوچرخه با عرض حدود 3.0 متر است. با توجه به دقت پلانیمتری 5.0 متر جاده های مرجع، دامنه عرض جاده 5 ± 3.75 × 4 + 5 متر است.یعنی از 13 تا 23 متر. برای اطمینان از صحت این تخمین، ما به طور تصادفی فواصل 791 جفت خط متناظر را در دو مجموعه داده اندازهگیری کردیم. هیستوگرام آنها در شکل 3 نشان داده شده است . بافرینگ با شروع از شعاع بافر مناسب (مثلا 9 متر)، درصد قابل توجهی (~58%) از جاده های همسایه را شامل می شود. افزایش بیشتر شعاع بافر اساساً شامل تمام جاده های همسایه می شود (به عنوان مثال، 96٪ در یک بافر 23 متری). بر اساس دو تخمین ثابت بالا، دامنه شعاع بافر در نهایت 11-24 متر انتخاب می شود.
شکل 3. هیستوگرام فواصل بین جفت جاده مرجع و OSM.
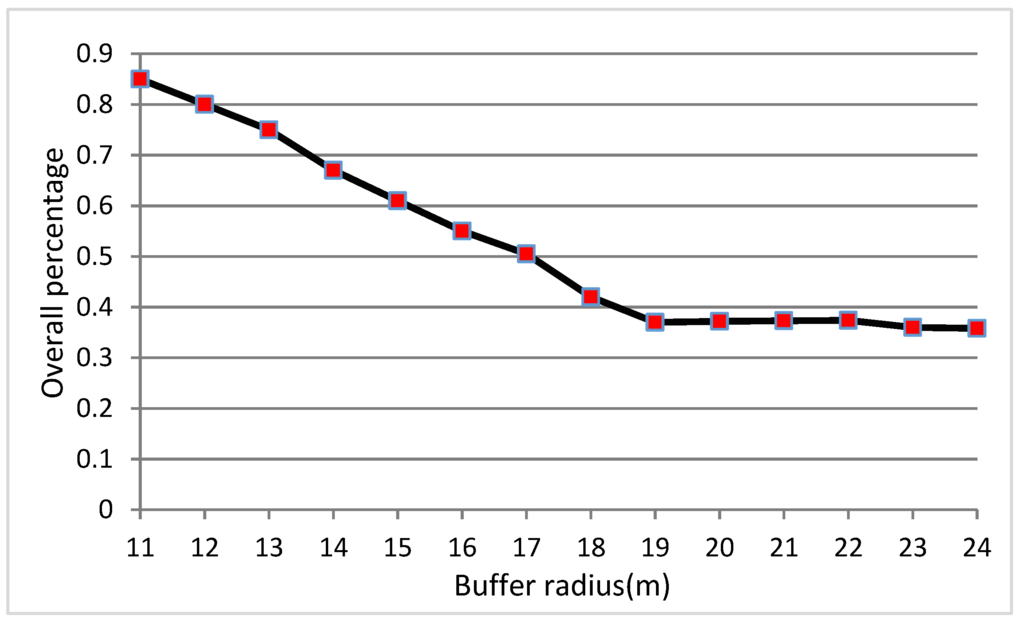
مرحله دوم محاسبه شعاع بافر بهینه است. شعاع بافر بهینه در محدوده تعیین شده در بالا است. تعداد کل و طول کل جاده های OSM در یک منطقه را به ترتیب T n و T l نشان می دهیم . به طور مشابه، برای جادههای جدید شناساییشده تحت شعاع بافر r i ، تعداد کل جادههای آنها n ( r i ) و طول کل جاده l ( r i ) را محاسبه میکنیم.). استفاده از تعداد یا طول برای توصیف جاده ها مناسب نیست زیرا جاده های ثبت شده در مجموعه داده ها بخش هایی غیر از جاده های انتگرال در واقعیت هستند. بنابراین، تعداد و طول با هم در معادله 1 در نظر گرفته می شوند، که در آن p ( r i ) درصد کلی جاده های جدید شناسایی شده است.
برای رسیدن به یک تعیین قابل اعتماد از شعاع بافر بهینه، ما در مجموع N برابر بافر را اعمال می کنیم، یعنی i = 1, 2, …, N . شکل 4 نمودار درصد کلی را برای یک منطقه 5 کیلومتر × 5 کیلومتر رسم می کند.
شکل 4. درصد کلی معادله (1) در یک منطقه 5 کیلومتر × 5 کیلومتر.
شعاع بافر بهینه باید به p پایدار ( r ) برسد، یعنی اولین مشتق آن
باید به حداقل برسد. برای رسیدن به یک راه حل قابل اعتماد، ما از یک استراتژی حداقل حداکثر استفاده می کنیم. با شروع از r 1 ، p ( r i ) را به صورت متوالی به گروه های همپوشانی N − M + 1 تقسیم می کنیم، جایی که M اندازه یک گروه است. سپس حداکثر dp ( r i ) را در هر گروه انتخاب می کنیم. این گروه max( dp ) برای بدست آوردن حداقل مقایسه می شوند. گروهی که دارای min(max( dp )) است به عنوان فاصله بهینه مورد انتظار ما در نظر گرفته می شود زیرا حداکثر مقدار اختلاف آن کمتر از گروه های دیگر است. به این معنی است که dp ( r i) در این گروه کمترین تغییرات یعنی گرایش تقریباً پایدار را تجربه می کند. پس از تعیین فاصله بهینه، شعاع بافر بهینه را می توان به سادگی با میانگین شعاع بافر در این گروه به دست آورد. فرض کنید که اولین شعاع در این گروه r k است و شعاع بافر بهینه r o به صورت محاسبه می شود.
در مطالعه ما، اندازه یک گروه به عنوان M = 4 انتخاب شده است. برای تأیید بیشتر این ایده، جاده های جدید شناسایی شده نیز با تفسیر بصری شناسایی می شوند. جادههای جدید بهدستآمده با شعاع بافری که کمتر یا بیشتر از مقادیر در بازه بهینه است، میتواند منجر به اشتباهاتی شود، مانند جادههایی که جدید نیستند یا جادههایی که جدید هستند را حذف کنند. بنابراین شعاع بافر بهینه باید در بازه بافر بهینه باشد.
2.3. جاده های جدید را به جاده های مرجع اضافه کنید
برای تشکیل یک جاده مرجع کامل و به روز شده، جاده های OSM تازه یافته شده باید از نظر هندسی، توپولوژیکی و معنایی به بهترین حد ممکن به جاده مرجع اضافه شوند. برای این منظور، دور دیگری از تجزیه و تحلیل بافر استفاده شده است، اما این بار به جاده های OSM جدید. در شکل 5 a نشان داده شده است، اگر بافر یک جاده OSM ایزوله با هیچ جاده مرجع تقاطع نکند، جاده OSM می تواند مستقیماً به جاده مرجع اضافه شود. شکل 5 ب یک جاده مرجع را نشان می دهد که به طور کامل در بافر جاده OSM سقوط می کند. سپس آنها را از نظر اهمیت، به عنوان مثال، طول و جهت مقایسه میکنند تا تصمیم بگیریم که آیا باید هر دو را نگه داریم یا مرجع را با OSM بهروزرسانی کنیم. در سناریوهای نشان داده شده در شکل 5c و d، یک جاده OSM به سختی یک جاده مرجع را در یک آستانه خاص لمس می کند. به عنوان مثال ، یا از جاده مرجع در بافر خود عبور می کند یا از آن عبور می کند. پس از آن جاده جدید باید به صورت توپولوژیکی برای اتصال به جاده مرجع قطع شود.
شکل 5. سناریوهای اضافه کردن جاده های OSM (جدید) (قرمز) به جاده های مرجع (سبز). ( الف ) جاده جدید جدا شده؛ ( ب ) حذف جاده مرجع ناچیز. ( ج ) زیراندازی جاده جدید. ( د ) عبور از جاده جدید.
علاوه بر هندسه و توپولوژی، ویژگی های جاده های مرجع باید تحت معیارهای معنایی خاصی به روز شوند. از آنجایی که ویژگی های دو مجموعه داده ممکن است سازگار نباشند، قوانین مطابقت یک به یک باید ایجاد شود. فیلدهایی مانند Shape، NAME و TYPE (یا “KIND”) در جاده های OSM برای بهترین تطابق آنها در جاده های مرجع یافت می شوند. هنگامی که دو فیلد در دو مجموعه داده یک نام داشته باشند، مستقیماً مطابقت داده می شوند. در غیر این صورت، فیلدها به صورت دستی مطابقت داده می شوند تا از اشتباهات تطبیق جلوگیری شود. شرایطی وجود دارد که ویژگی های جاده های نهایی باید با استفاده از ویژگی های جاده های OSM تعیین شوند. برای این منظور ابتدا باید معیارهای تشابه بین صفات تعریف شود. شباهت ویژگی (رشته) بین OSM و جاده های مرجع با یک معیار پرکاربرد محاسبه می شود.34 ]، که در مورد ما به عنوان هزینه تبدیل یک رشته در جاده OSM به رشته دیگر در جاده مرجع تعریف می شود. وزن برای درج و حذف به ترتیب 1 و وزن جایگزین برای دو کلمه یکسان 0 و برای دو کلمه متفاوت 1 تنظیم می شود. به عنوان مثال، فاصله ویرایش بین “جاده یینگ یوان” در جاده OSM و “جاده دا زو یوان” در جاده مرجع به صورت زیر محاسبه می شود:
جدول 1. مثالی برای محاسبه فاصله ویرایش بین دو نام جاده.
همانطور که در جدول 1 نشان داده شده است، عنصر عددی D i,j ، که فاصله ویرایش بین اولین کلمات i در نام جاده مرجع و اولین کلمات j در نام جاده OSM را نشان می دهد، می تواند با عبارت زیر محاسبه شود:
فاصله ویرایش بین «جاده دا زو یوان» و «جاده یینگ یوان» 2 است (عدد در گوشه پایین سمت راست). اگر فاصله Edit در محدوده قابل قبول (<3) باشد، ویژگی های جاده مرجع را اتخاذ می کنیم و همه آنها به جاده های نهایی منتقل می شوند. اگر فاصله ویرایش فراتر از حد تحمل باشد، جاده های نهایی از ویژگی های جاده های OSM استفاده می کنند. گاهی اوقات، ویژگی های جاده OSM باید به نوع ویژگی های مربوط به جاده مرجع تغییر یابد. به عنوان مثال، ویژگی جاده های OSM ONEWAY است و مقدار می تواند “بله” یا “خیر” باشد. اگر این مقدار جاده جدید بله باشد، پس از اضافه شدن جاده جدید به جاده مرجع، مقدار LANNUM در جدول اسنادی نقشه راه مرجع برابر با 1 تعیین می شود.
3. داده های تست
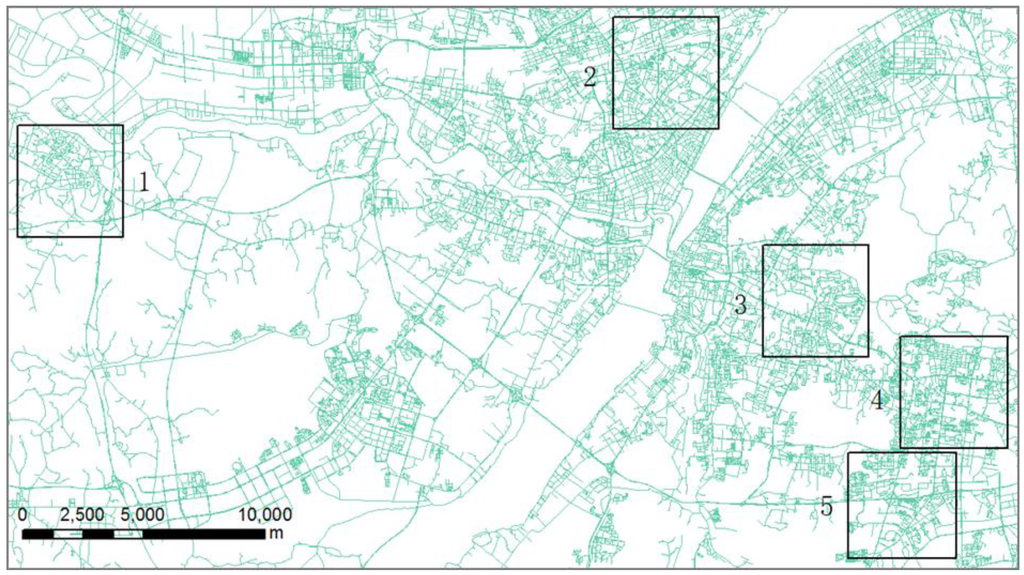
در این مطالعه از نقشه های راهیابی به عنوان جاده های مرجع استفاده شده است. چنین دادههایی بر اساس نقشههای پایه راه NFGIS، که در ابتدا با VirtuoZo و JX4 (ایستگاههای کاری فتوگرامتری دیجیتالی ساخت چین) از عکسهای هوایی سپتامبر 2003 جمعآوری شدند، جمعآوری شدند. دقت نقشههای راه NFGIS به ترتیب 5.0 متر برای نقشهسنجی و 1.5 متر است. برای ارتفاع از سال 2003، نقشه برداری میدانی معمولی توسط یک شرکت ناوبری (NavInfo) هر ساله برای به روز نگه داشتن داده های جاده به منظور تولید نقشه های راه ناوبری انجام می شود. نقشه راه ناوبری مورد استفاده در این مطالعه در آگوست 2008 تکمیل شد و مساحت 8494 کیلومتر مربع را پوشش می دهد .در شهر ووهان برای اهداف ارزیابی و تصویرسازی، ما همچنین پنج زیر مجموعه کوچکتر را از این مجموعه داده ووهان انتخاب کردیم که هر کدام 5 کیلومتر × 5 کیلومتر است. توزیع آنها در شکل 6 در زیر نشان داده شده است. برای در نظر گرفتن ساختارهای جاده ای متنوع، زیرمجموعه 1 به عنوان یک منطقه حومه شهری حاوی چند بزرگراه انتخاب می شود، در حالی که زیر مجموعه 2 یک منطقه تجاری قدیمی است. هر دو زیر مجموعه 3 و 4 مناطق تجاری جدید و مناطق آموزشی هستند. زیر مجموعه 5 نزدیک حومه شهر است و شامل بخشی از یک منطقه آموزشی است.
شکل 6. جاده های مرجع بخشی از شهر ووهان و پنج زیر مجموعه 5 کیلومتر × 5 کیلومتر آن.
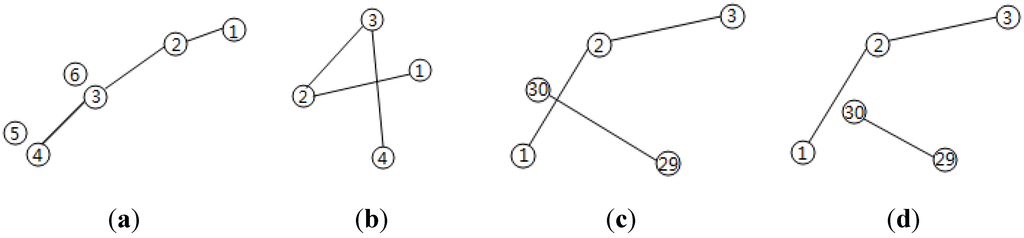
در مورد داده های جاده OSM، عمدتاً چهار راه برای به دست آوردن وجود دارد: (1) توسط JOSM (ابزار ویرایش جاوا OSM رومیزی)، (2) با وارد کردن URL متشکل از OSM API و طول و عرض جغرافیایی منطقه مورد نظر، ( 3) توسط ابزار Osmosis، یک برنامه جاوا خط فرمان، و (4) با دانلود مستقیم از وب سایت Cloudmade Corp، یک شرکت تجاری که دانلود رایگان داده های جاده OSM را در شش فرمت ارائه می دهد. ما از وبسایت Cloudmade برای دانلود دادههای جاده OSM در منطقه آزمایشی در هر دو فرمت OSM xml و shapefile استفاده کردیم. با این حال، داده های جاده OSM، که اغلب توسط افرادی بدون تخصص فنی آموزش دیده و بدون نیاز به کیفیت مشترک تولید می شوند، ممکن است خطاهای توپولوژیکی زیادی را نشان دهند. برخی از این خطاهای توپولوژیکی ممکن است روی روش اختلاط بعدی تأثیر بگذارند و باید قبل از آن اصلاح شوند. در آزمایشات ما، چهار نوع خطای توپولوژیکی در جاده های OSM مشاهده می شود: (الف) افزونگی، (ب) خود تقاطع، (ج) بیش از حد شلیک، و (د) زیر تیراندازی. که درشکل 7 ، اعداد دایره شده گره ها را مشخص می کنند و خط بین گره ها یک رکورد جاده ای در جاده OSM است. افزونگی زمانی رخ می دهد که بخشی از یک خط خود را تکرار کند. در شکل 7 الف مشاهده می شود که خط تشکیل شده توسط گره 3 و گره 4 همان خطی است که بین گره 5 و گره 6 ایجاد شده است. برای تصحیح آن باید خط اضافی حذف شود. خود تقاطع به این معنی است که بخشی از یک خط قسمت دیگری از همان خط را قطع می کند، همانطور که در شکل 7 ب نشان داده شده است. برای اصلاح، خطوط گره 1-2 و گره 3-4 را در تقاطع آنها تقسیم می کنیم. Over-shoot در شکل 7 نشان داده شده استc، جایی که خط گره 29-30 خط گره 1-2 را قطع می کند. اگر پاره خط اضافی در گره 30 در محدوده تلورانس باشد، گره 30 باید به خطی که توسط گره های 1 و 2 تشکیل شده است، بریده شود. زیرشاخه در شکل 7 d زمانی رخ می دهد که خط گره 29 تا 30 خط را لمس نکند. گره 1-2 در محدوده تحمل. ما این خطا را با گسترش خط گره 29-30 به خط گره 1-2 اصلاح می کنیم.
شکل 7. برخی از خطاهای توپولوژیکی در جاده های OSM: ( الف ) افزونگی. ( ب ) خود تقاطع. ( ج ) بیش از حد شلیک. ( د ) زیر تیراندازی.
تعداد خطاهای توپولوژیکی در جاده های OSM شهر ووهان در جدول 2 خلاصه شده است. نتایج برای دو فرمت داده ثابت می ماند، که نشان می دهد فرمت های داده OSM .xml و shapefile از نظر توپولوژیکی سازگار هستند. با این حال، اطلاعات ویژگی در قالب داده .xml کاملتر است.
جدول 2. تعداد خطاهای توپولوژیک در جاده های OSM شهر ووهان.
4. نتایج و بحث
این بخش نتایج حاصل از مجموعه داده شهر ووهان را ارائه و ارزیابی می کند. این به انتخاب بافرهای بهینه می پردازد و جاده های جدید شناسایی شده و جاده های مرجع به روز شده را ارائه می دهد.
4.1. بافرهای بهینه
همانطور که قبلا توضیح داده شد، شعاع بافر بهینه بر اساس جاده های جدید شناسایی شده در زیر شعاع بافر از 11 تا 24 متر تعیین می شود. شکل 8 زیر نمودارهای تعداد جاده های جدید شناسایی شده را بر حسب شعاع بافر نشان می دهد. نشان داده شده است که نتایج در برخی از فواصل زمانی برای هر زیر مجموعه گرایش پایداری را تجربه می کنند. با استفاده از روش ارائه شده در بخش 2.2 ، شعاع های بافر بهینه انتخاب شده در ردیف دوم جدول 3 فهرست شده است .. زیرمجموعه های 2، 3 و 4 دارای شعاع بافر بهینه نسبتاً بالاتری در مقایسه با دو زیر مجموعه دیگر هستند، زیرا مناطق تجاری اغلب به دلیل نیازهای ترافیکی سنگین جاده های وسیع تری دارند. همانطور که برای زیر مجموعه 1، بزرگراه های آن به عرض جاده ها در زیر مجموعه کمک می کنند. زیر مجموعه 5 از منطقه مرکز شهر دور است و بنابراین شعاع بافر بهینه آن کوچکترین است. شعاع بافر بهینه برای منطقه بزرگ شهر ووهان تحت تأثیر جاده های عریض در زیرمجموعه های 2، 3 و 4 است و مانند آن سه زیر مجموعه تعیین می شود.
شکل 8. نمودارهای تعداد شناسایی شده جاده های جدید ( a ) و طول آنها ( b ) در مقابل شعاع بافر برای پنج زیر مجموعه 5 کیلومتر × 5 کیلومتر در ووهان.
4.2. جاده های جدید شناسایی شد
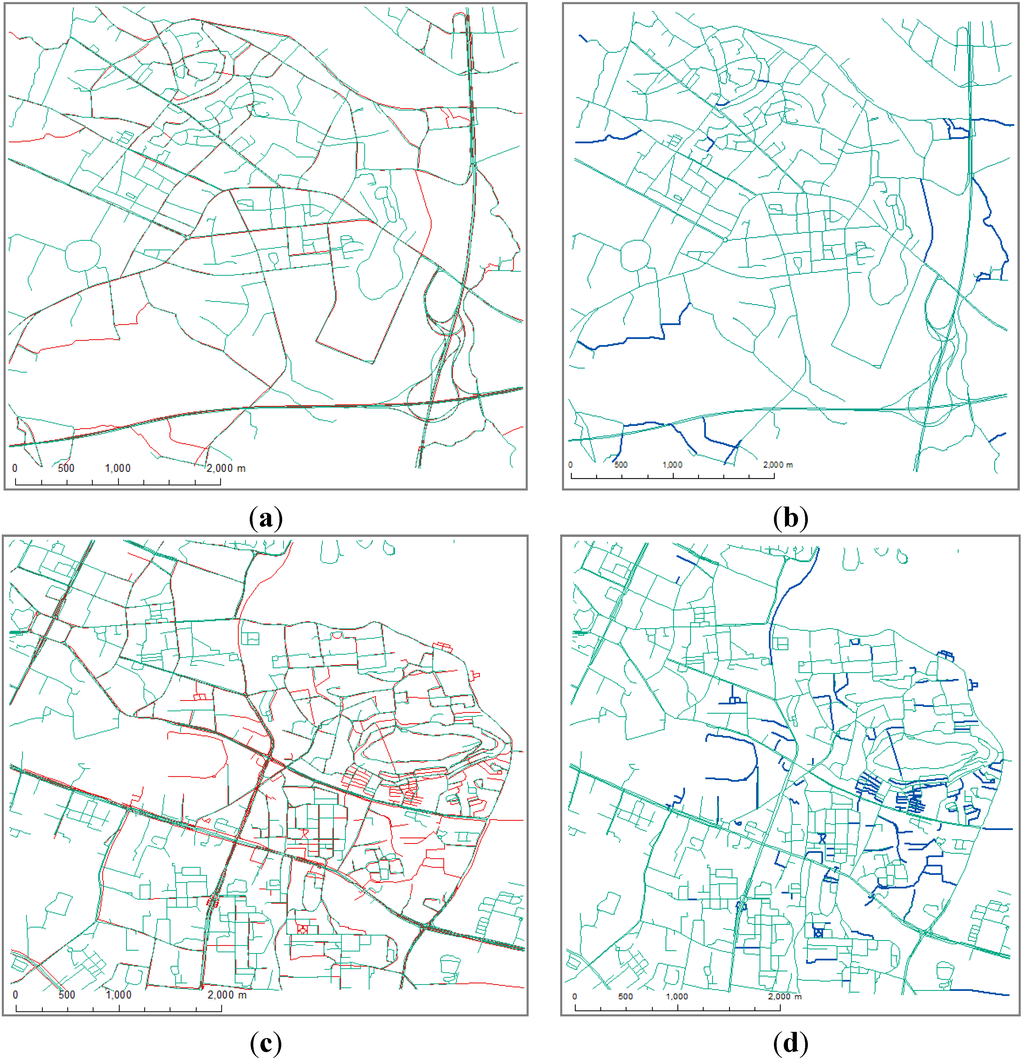
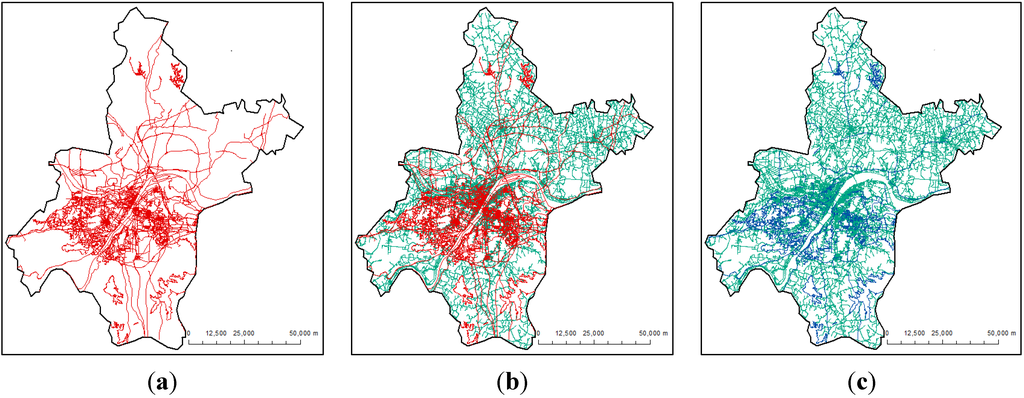
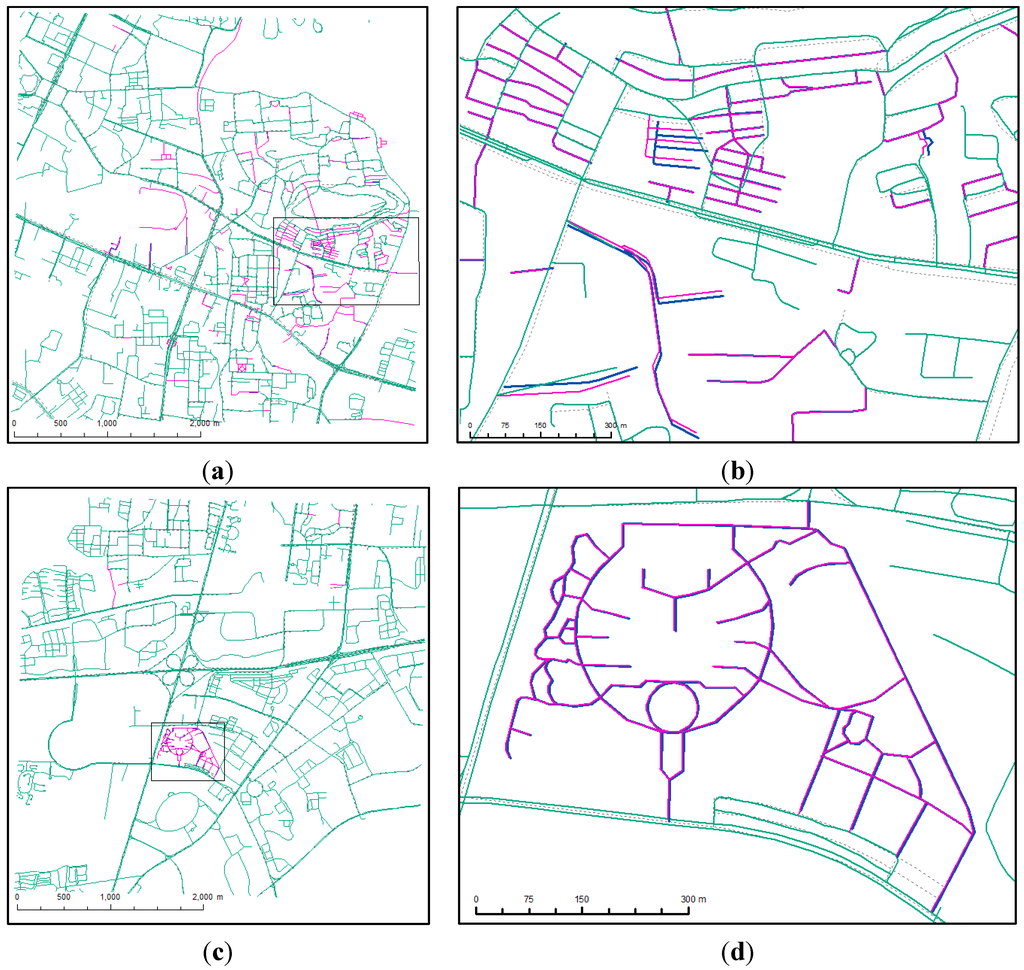
جاده های جدید آنهایی هستند که با مناطق حائل جاده های مرجع مطابقت ندارند. به عنوان مثال، نتایج زیر مجموعه های 1 و 3 در شکل 9 نشان داده شده است. جاده های جدید شناسایی شده به رنگ آبی در شکل 9 نشان داده شده اند . آنها منحصر به فرد هستند زیرا هیچ جاده مربوطه در مجموعه داده مرجع (سبز) وجود ندارد. همچنین، نتیجه شهر ووهان در شکل 10 با همان طرح رنگی نشان داده شده است. این نشان می دهد که بیشتر جاده های OSM (قرمز، شکل 10 a) که توسط جاده های مرجع (سبز) در شکل 10 ب پوشانده نشده اند، به عنوان جاده های جدید (آبی) در شکل 10 ج یافت می شوند. این بدان معناست که جاده های جدید با روش ما با موفقیت شناسایی می شوند.
شکل 9. جاده های مرجع (سبز)، جاده های OSM (قرمز)، و جاده های جدید شناسایی شده (آبی) برای زیر مجموعه های 1 و 3 در ووهان. ( الف ) مرجع در بالای جاده های OSM برای زیر مجموعه 1؛ ( ب ) جاده های جدید شناسایی شده برای زیر مجموعه 1. ( ج ) مرجع در بالای جاده های OSM برای زیر مجموعه 3. ( د ) جاده های جدید برای زیر مجموعه 3 شناسایی شده است.
شکل 10. جاده های OSM (قرمز)، جاده های مرجع (سبز)، و جاده های جدید شناسایی شده (آبی) برای مجموعه داده ووهان. ( الف ) جاده های OSM؛ ( ب ) OSM در بالای جاده های مرجع. ( ج ) جاده های جدید در بالای جاده های مرجع شناسایی شده است.
برای ارزیابی بیشتر جادههای جدید حاصل از نظر کمی، ما بهصورت دستی همه جادههای جدید را در پنج زیرمجموعه 5 × 5 کیلومتر مربع انتخاب میکنیم و بهطور تصادفی 100 جاده را برای مجموعه داده ووهان انتخاب میکنیم. سپس از آنها به عنوان مرجعی برای مقایسه با جاده های جدید شناسایی شده خودکار استفاده می شود. در کار ما، از دقت و یادآوری برای ارزیابی نتایج استفاده می شود:
در دو معادله فوق، TPL (طول مثبت واقعی) طول جاده های جدید به درستی شناسایی شده، FPL (طول مثبت کاذب) طول جاده های جدید نادرست شناسایی شده و FNL (طول منفی کاذب) طول جاده های جدید است. جاده های جدید را از دست دادم دقت، درجه دقت را با توجه به جادههای جدید ادعا شده اندازهگیری میکند، و فراخوان نشاندهنده درجه دقت با توجه به جادههای جدید واقعی است. نتایج در جدول 3 فهرست شده است. همانطور که مشاهده می شود، روش ما درجه بالایی از اعتبار را با دقت متوسط 96.49٪ و میانگین یادآوری 97.63٪ نشان می دهد.
جدول 3. انتخاب شعاع بافر بهینه، شناسایی جاده های جدید و ارزیابی برای پنج زیر مجموعه و شهر ووهان. توجه: 100 جاده از مجموعه داده ووهان به طور تصادفی برای ارزیابی انتخاب شدند.
4.3. جاده های مرجع به روز شده
جاده های جدید شناسایی شده در نهایت در جاده های مرجع در مطالعه ادغام می شوند. به عنوان مثال، شکل 11 نتیجه زیرمجموعه 3 و زیرمجموعه 5 را نشان می دهد. از نظر هندسی، جاده های جدید بر اساس روابط هندسی جاده های همسایه که با آنها تلاقی می کنند، به جاده های مرجع نزدیک تر شده اند. جادههای جدید (آبی) با توجه به جادههای OSM (خاکستری نقطهدار) مقدار کمی نسبت به جادههای مرجع نشان میدهند تا به پایگاه داده جادههای جدید ادغام شده (صورتی) تبدیل شوند. از نظر توپولوژی، پس از تبدیل هندسی، اگر فاصله در محدوده تحمل باشد، توپولوژی به روز می شود.
شکل 11. جاده های جدید به جاده های مرجع زیرمجموعه 3 ( a , b ) و زیر مجموعه 5 ( c , d ) اضافه شده است. شکل های سمت راست b و d نسخه بزرگ شده ای از قسمت های کادر بندی شده در شکل های سمت چپ a و c هستند. جاده های مرجع به رنگ سبز، جاده های جدید به رنگ آبی، جاده های جدید ادغام شده به رنگ صورتی، جاده های OSM با رنگ خاکستری نقطه چین نشان داده شده اند.
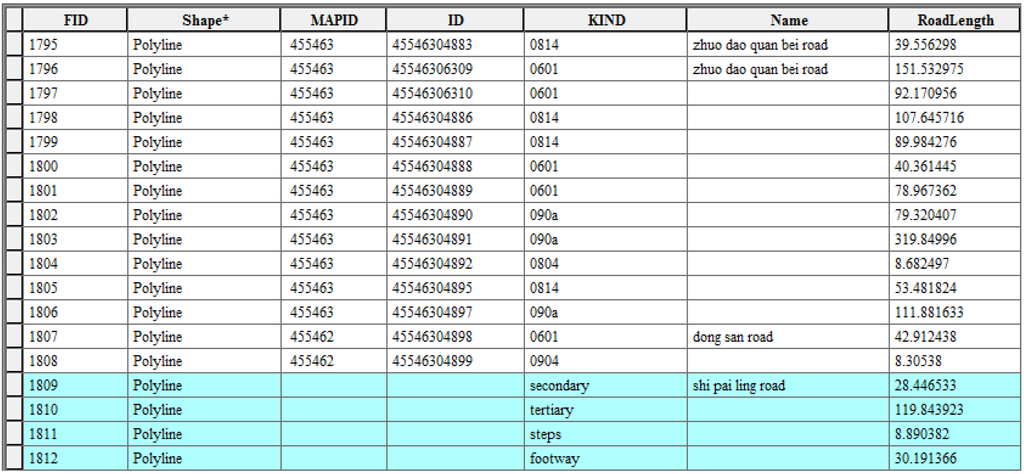
از نظر ویژگیها، ویژگی «نوع» جادههای OSM به ویژگی «نوع» جادههای مرجع اضافه میشود، در حالی که فیلد «نام» باید توسط همسایگانش در صورت لزوم تصمیمگیری شود. در شکل 12 ، ویژگی های Shape، Kind و Name و غیره برای جاده های جدید (اقلام برجسته شده) اضافه شده است.
شکل 12. جاده های OSM جدید به جدول ویژگی های جاده های مرجع به روز شده (زیر مجموعه 3) اضافه شده است.
طول راه های جدید و درصد آنها نسبت به طول راه های مرجع در جدول 4 آمده است. از آنجایی که زیرمجموعه 2 عمدتاً از مناطق تجاری قدیمی تشکیل شده است، تنها درصد کمی (2.61٪) از جاده های جدید از آگوست 2008 تا نوامبر 2011 توسعه یافته است. از سوی دیگر، زیر مجموعه های 3 و 4 مناطق تجاری و مناطق آموزشی جدید هستند. هر دوی آنها در نتیجه سیاست دولت محلی در سال های اخیر مراکزی هستند که به سرعت در حال توسعه هستند. جاده های جدید در این مناطق به ترتیب به 19.60 درصد و 9.68 درصد بسیار متمایز می رسد. زیرمجموعه های 1 و 5 دورتر از مرکز شهر قرار دارند و در آن دوره زمانی هدف توسعه قرار نگرفته اند. فقط تعداد کمی از تولیدکنندگان در آنجا مستقر بودند و تغییرات متوسط (5.62٪ و 5.89٪) بود. همچنین میتوان نتیجه گرفت که درصد جادههای جدید تحت تأثیر مشارکتکنندگان در جادههای OSM در مناطق خاص است. برای مثال، زیرمجموعه 3 دارای بالاترین نرخ جاده جدید (19.60%) است. و این ممکن است تا حدی به خاطر دانشجویان کالج در آن منطقه باشد که به فناوری جدید حساس هستند و احتمال بیشتری دارد که داده های خود را به موقع آپلود و ویرایش کنند. برای منطقه بزرگ ووهان، جاده های جدید OSM شناسایی شده می تواند به 11.96٪ از جاده های مرجع برسد که ارزش داده های جغرافیایی جمع سپاری را نشان می دهد.
جدول 4. طول و درصد جاده های جدید OSM شناسایی شده.
5. نتیجه گیری
هدف این کار یافتن جادههای جدید، اعم از جدید نقشهبرداری شده یا ساختهشده، در دادههای OSM در دسترس عموم برای یک نقشه راه مرجع معین و ایجاد یک نقشه راه بهروز شده است. مطالعات کنونی نشان میدهد که دادههای OSM معمولاً باید دقت موقعیت چند متری داشته باشند، که یک ثبت مشترک اولیه مناسب با نقشه راه مرجع ارائه میکند. تحت این شرایط، جاده های جدید عمدتاً آنهایی هستند که در محدوده جاده های مرجع به درستی بافر نیستند. ما یک روش بافر پیشرونده را برای تعیین شعاع بافر بهینه ارائه میکنیم به طوری که تعداد ثابتی از جادههای جدید شناسایی شده را به دست میدهد. آزمایش با مجموعه داده شهر ووهان به مساحت 8494 کیلومتر مربعو در مجموع 16783 کیلومتر جاده کارایی چنین تکنیکی را نشان داد. با این روش، می توان به دقت متوسط 96.49٪ و میانگین فراخوانی 97.63٪ برای تشخیص تغییر جاده بین دو مجموعه داده دست یافت. تغییرات اندک ~ 6٪ در کیفیت در بین پنج مجموعه داده 5 کیلومتر × 5 کیلومتر آزمایش شده، استحکام و عمومیت روش بافر پیشرونده را نشان می دهد. علاوه بر این، نشان داده شد که دادههای OSM میتوانند 11.96 درصد یا در مجموع 2008.6 کیلومتر جادههای جدید را به نقشه راه مرجع اضافه کنند، که افزوده بسیار مهمی است و ارزش دادههای OSM را در صورت استفاده صحیح نشان میدهد. از آنجایی که ممکن است ناهماهنگیهای هندسی، توپولوژیکی و معنایی بین جادههای مربوطه وجود داشته باشد، برخی قوانین برای تعریف و تبدیل جادههای جدید شناساییشده به نقشه راه مرجع برای دستیابی به یک نتیجه ترکیبی سازگار ضروری است. نشان داده شده است که بیشتر جاده های جدید شناسایی شده در مناطق تجاری جدید و مناطق آموزشی قرار دارند. این مطالعه نشان میدهد که دادههای OSM میتواند منبع بسیار امیدوارکنندهای برای بهروزرسانیهای دینامیک دادههای جاده و تشخیص شانس باشد.
با وجود ارزش زیاد داده های OSM، هنوز محدودیت هایی در به روز رسانی نقشه راه وجود دارد. کامل بودن و کیفیت جادههای OSM هنوز یک مسئله باقی مانده است. به عنوان مثال، در میان تمام شهرهای استان هوبی، تنها ووهان تا کنون اطلاعات دقیق OSM را دارد. برای سایر شهرها، داده های OSM فقط شامل بزرگراه های اصلی می شود. بنابراین، ما معتقدیم که جنبه های زیر در آینده نیاز به بهبود دارند. ابتدا، در مرحله افزودن اطلاعات هندسی به پایگاه داده جاده مرجع، ممکن است به الگوریتم های تطبیق دقیق با استفاده از گره های جاده یا تقاطع ها نیاز باشد. علاوه بر این، مطالعه معنادار دیگری را می توان در تلفیق اطلاعات معنایی انجام داد. ممکن است بتوان با در نظر گرفتن اطلاعات اسنادی تحت طرحی از سطوح جزئیات، تطابق را بهبود بخشید. ثانیاًیعنی.، تغییر منفی) زیرا هیچ تضمینی وجود ندارد که مجموعه داده های OSM شامل تمام جاده های موجود باشد. در واقع، داده های OSM اغلب پوشش کاملی ندارند. تنها زمانی که مردم واقعاً یک جاده را دیجیتالی کنند، چه با ارجاع به یک تصویر یا از طریق GPS، می توانند اطلاعات جاده را ضبط و به اشتراک بگذارند. هنگامی که OSM پوشش کامل تری داشته باشد یا بتواند حاشیه نویسی های به روز رسانی خاصی را در خود جای دهد، تعیین جاده های حذف شده ممکن است امکان پذیر شود و باید برای به روز رسانی واقعی تر پایگاه داده جاده ها به فرآیند اضافه شود. در نهایت، چهار نوع خطای توپولوژیکی که در دادههای OSM با آنها مواجه میشوند ممکن است شامل نباشند و نیاز به انجام یک مطالعه جامعتر در مورد خطاهای توپولوژیکی در دادههای OSM وجود دارد. علاوه بر این، برخی ناسازگاری های توپولوژیکی بین جاده های OSM اضافه شده و جاده های مرجع در مناطق پیچیده وجود دارد.
ما انتظار داریم که OSM به دلیل رشد سریعتر به زودی به عنوان یک منبع داده ارزشمند به رسمیت شناخته شود. به عبارت دیگر، این امکان وجود دارد که دیگر فرض نکنیم پایگاه داده رسمی یا تجاری جاده ها از نظر موقعیت، مضامین، توپولوژی و سایر اطلاعات فضایی برتر است. بنابراین، چگونگی بازسازی یک شبکه جاده ای جدید از طریق ترکیب داده ها ممکن است در آینده موضوعی مناسب تر باشد.






بدون نظر