


خلاصه
زیرساختهای جادهای در کشورهایی مانند هند با سرعتی سریع در حال گسترش است و شناسایی و تعمیر به موقع جادههای بد برای مقامات به طور فزایندهای دشوار میشود. سیستمهای اطلاعات جغرافیایی فعلی (GIS) فاقد اطلاعات در مورد ویژگیهای جادهای مانند نوع سطح جاده، قطعکنندههای سرعت و دادههای ویژگی پویا مانند کیفیت جاده هستند. از این رو نیاز به ساخت سیستم های نظارت بر جاده ها وجود دارد که قادر به جمع آوری چنین اطلاعاتی به صورت دوره ای باشند. محدودیتهای تصاویر ماهوارهای با توجه به وضوح و در دسترس بودن، نظارت بر جادهها را در درجه اول به یک فعالیت در میدان تبدیل میکند. نظارت در حال حاضر با استفاده از وسایل نقلیه ویژه ای انجام می شود که مجهز به اسکنرهای لیزری گران قیمت هستند و علاوه بر پوشش بسیار کم، به منابع ماهری نیز نیاز دارند. از این رو چنین سیستم هایی برای نظارت مداوم جاده ها مناسب نیستند. سیستمهای جایگزین ارزانتری با استفاده از حسگرهایی مانند شتابسنج و GPS (سیستم موقعیتیابی جهانی) وجود دارد، اما برای دستیابی به سطوح اطلاعات بالاتر مجهز نیستند. این مقاله نمونه اولیه سیستم MAARGHA (MAARGHA در زبان سانسکریت به معنای مسیر ابدی به سمت راه حل) را ارائه می دهد که نشان می دهد می تواند با ترکیب داده های چند حسی مانند تصویر دوربین، داده های شتاب سنج و مسیر GPS در یک اطلاعات، بر معایب سیستم های موجود غلبه کند. سطح، جدا از ارائه اطلاعات اضافی جاده مانند نوع سطح جاده. MAARGHA در شرایط مختلف جاده و ویژگی های داده های حسگر برای ارزیابی کاربردهای بالقوه آن در سناریوهای دنیای واقعی آزمایش شده است. سیستم توسعهیافته در مقایسه با پیشرفتهترین سیستمهای تخمین وضعیت جاده مانند Roadroid به سطوح اطلاعات بالاتری دست مییابد. عملکرد سیستم در طبقه بندی نوع سطح جاده به شرایط محیطی محلی در زمان تصویربرداری بستگی دارد. در مطالعه ما، دقت طبقهبندی نوع سطح جاده برای مجموعههای داده با شرایط محیطی تقریباً ایدهآل به 100٪ رسید و برای مجموعه دادههای دارای سایه و موانع به 60٪ کاهش یافت.
کلید واژه ها:
وضعیت جاده ؛ نوع سطح جاده ؛ سنسورهای کم هزینه ؛ GPS ؛ شتاب سنج ; دوربین
1. معرفی
اتصال شهرها و مناطق داخلی، زیرساخت جاده ها شریان اقتصاد یک کشور است. این امکان حمل و نقل ارزان و سریع افراد، خدمات و کالاها را به داخل کشور فراهم می کند. در کشورهای در حال توسعه اخیراً تمرکز و بودجه برای ساخت و نگهداری بزرگراه ها افزایش یافته است. اما راه های محلی شهری و روستایی به دلیل کمبود بودجه، برنامه ریزی ضعیف و عدم هماهنگی بین شهرداری و پیمانکاران مورد بی توجهی قرار گرفته است. جاده های بدون تعمیر و نگهداری به مرور زمان خراب می شوند و غیرقابل استفاده می شوند و از تعمیر فراتر می روند. در هند، بزرگراه های ملی با بودجه بهتر تنها 1.9 درصد از کل شبکه راه ها را تشکیل می دهند، اگرچه این کشور دومین جاده طولانی دنیا را دارد. این جاده ها آسفالت شده است قیر و بتن یا حتی گل فشرده بسته به نیاز محل و هزینه های نگهداری متفاوتی را متحمل می شود. از این رو، آمار وضعیت جاده یا کیفیت و نوع سطح جاده برای کمک به متقاعد کردن تصمیمگیرندگان برای تخصیص بودجه به جادههای جدید و پروژههای تعمیر و نگهداری ضروری است. همچنین می تواند به آنها کمک کند تا بر اساس میزان آسیبی که جاده متحمل می شود، تعمیر و نگهداری مناطق خاصی را در اولویت قرار دهند.
تعمیر و نگهداری جاده به صورت دوره ای یا به عنوان یک رویداد برای رفع مشکلات عمده وضعیت جاده مانند چاله ها، ترک های سطحی و موارد مشابه انجام می شود. برای شناسایی و مکان یابی دومی، نظارت مستمر جاده ها برای این تغییرات پویا به عنوان بخشی از سیستم های اطلاعات جغرافیایی عملیاتی تعریف شده (GIS) مبتنی بر سیستم اطلاعات جاده که وضعیت جاده و نوع سطح را ردیابی می کند، مورد نیاز است. جدا از ارائه هندسه و مکان ویژگیهای جاده، سیستمهای GIS فعلی معمولاً دادههای ویژگیهایی مانند محدودیت سرعت، نوع منطقه، جهت جریان ترافیک و گاهی اوقات برخی از مبلمان جاده مانند علائم راهنمایی و رانندگی و تابلوهای راهنما را ارائه میدهند. با این حال، این سیستمها زیرساخت جمعآوری داده کارآمدی برای بهروزرسانی ویژگیهای پویا ندارند.
به جای مشاهده حقیقت زمین از بازرسی های دستی، استفاده از فناوری برای نظارت دقیق بر کیفیت جاده ترجیح داده شده است. سیستمهای گرانقیمت سوار بر خودرو که از حسگرهای لیزری یا راداری با قدرت بالا استفاده میکنند، پیشنهاد شدهاند، اما به دلیل پوشش کم و در دسترس نبودن اپراتورهای ماهر، برای گسترش در شهرها و مناطق چالشبرانگیز هستند. از طرف دیگر، استفاده از تلفنهای هوشمند بهعنوان پلتفرمهای جمعآوری دادهها در مطالعات مختلف از جمله برنامههای نظارت بر جادهها بسیار مورد توجه بوده است، زیرا دارای مجموعهای از حسگرهای مفید مانند GPS، دوربین و غیره است.. تلفنهای هوشمند نیز پلتفرمهای فراگیر و ارزانی هستند، اما استفاده از حسگرهای درجه مصرفکننده برای جمعآوری دادهها ممکن است دادههای پر سر و صدا و غیر قابل اعتماد تولید کند. از این رو در زمینه نظارت بر جاده ها، سیستم های ارزان و هوشمندی باید ساخته شود که از داده های ناهمگن برای دستیابی به سطح اطلاعات قابل مقایسه از وضعیت جاده استفاده کند [ 1 ، 2 ]] شبیه به سیستم های گران قیمت مبتنی بر لیزر. این مقاله یک سیستم نمونه را پیشنهاد میکند و میسازد که وضعیت جاده و نوع سطح جاده را با ترکیب دادههای چندحسی، مشتقشده از شتابسنج، GPS و دوربین، در سطح اطلاعات شناسایی و طبقهبندی میکند. این به طور موثر نوع سطح جاده را به قیر آسفالت / قیر، جاده های بتنی یا گلی و وضعیت جاده را به چهار سطح مجزا طبقه بندی می کند که خوب، رضایت بخش، نامطلوب و ضعیف هستند.
2. سیستم های مانیتورینگ جاده های موجود
در حالی که طیف وسیعی از سیستمهای مانیتورینگ جاده در عمل هستند، از یک سیستم کاملاً دستی و مبتنی بر کاغذ تا یک ارائهدهنده اطلاعات مهندسی با هدایت لیزری کاملاً خودکار، درک و ارزیابی این موارد از نظر تنوع اطلاعات، دقت و پارامترهای مرتبط مهم است. : مقرون به صرفه بودن و مقیاس پذیری. آژانسهای نظارت بر جادهها با معرفی «سیستم تصویربرداری جاده لیزری» (LRIS) در سال 2005 [ 3 ] و سیستمهای لیزری مشابه مانند IBEO Laser [ 4 ] و PPS [ 5 ] شاهد تغییر الگو از سیستمهای مبتنی بر دوربین به اسکنرهای لیزری بودهاند.]. به طور معمول، یک یا دو پرتو لیزر روشنایی که توسط سطح جاده منعکس میشوند، توسط دوربینهای خطی تصویربرداری میشوند تا نمایه سهبعدی جاده را ارائه دهند. این سیستم ها وفاداری بالا (رزولوشن 1 میلی متر) و زمان عملیاتی در هر پرواز کم (> 100 کیلومتر در ساعت) را ارائه می دهند. با این حال هزینه بالای تجهیزات، پیچیدگی پردازش داده ها و نیاز به منابع ماهر این سیستم ها، عملکرد کلی را کند می کند و استفاده از آنها را به عنوان ابزاری برای نظارت مداوم جاده ها غیرعملی می کند. رای دهندگان پاومون [ 6] یک سیستم GIS مبتنی بر وب است که از دادههای چند حسگر یکپارچه مانند سنسور فشار تایر، شتابسنج، لیزر، رادار و تصاویر برای رسیدن به پارامترهای آسیب جاده استفاده میکند. علیرغم قابلیتها، نیاز به راهاندازی خودروی تخصصی، استفاده از سیستم را به عنوان یک پلت فرم جمعآوری دادههای انبوه محدود میکند. در حالی که دو سیستم فوق اطلاعات دقیق درجه مهندسی را در مورد وضعیت جاده ارائه می دهند، سایر اطلاعات اضافی مانند سطح جاده باید به صورت دستی جمع آوری شوند. علاوه بر این، این سیستم ها امتیاز کمتری در مقرون به صرفه بودن و مقیاس پذیری دارند.
با تقلید از روند اخیر در روش های جمع آوری داده ها، تلفن های هوشمند به عنوان یک پلت فرم نظارت بر جاده ها مورد استفاده قرار گرفته اند. گوشیهای هوشمند در دنیای امروزی منظره مکرر هستند و همچنین دارای زرادخانهای از حسگرهای ارزشمند برای جمعآوری دادهها هستند. سیستمهای پیچیده ممکن است سودمند باشند، اما سیستمهای مبتنی بر تلفن همراه میتوانند به راحتی افزایش یابند و مزیت ارزشمندی است که ارائه میدهند. نمونه های اولیه مبتنی بر تلفن هوشمند Nericell [ 7 ] و Wolverine [ 8] بر اساس تغییر در خوانش شتاب سنج در جهت گرانش (جهت Z) دست اندازهای جاده را تشخیص دهد. علاوه بر این، آنها همچنین شرایط ترافیکی را بر اساس رویدادهای ترمز که منجر به تداوم افزایش در خواندن شتاب سنج در امتداد جهت حرکت وسیله نقلیه (جهت X) می شود، تخمین می زنند. در حالی که Nericell از آستانه های ثابت Z-Peak [ 9 ] و Z-Sus [ 7 ] در دو سطح سرعت برای طبقه بندی وضعیت جاده استفاده می کند، Wolverine آستانه ها را با آموزش SVM بر اساس شش ویژگی – میانگین و انحراف استاندارد در سه محور مختصات، یاد می گیرد. (µX، µY، µZ، σX، σY و σZ) در یک پنجره 1 ثانیهای. همچنین در تشخیص چالهها از سایر ناهنجاریهای جادهای مانند عبور راه آهن، چراغهای خط مرکزی، سرعتشکنها و غیره کار شده است (گشت چاله (P2 ) [ 9 ]) با تجزیه و تحلیل الگوها در خواندن شتاب سنج با استفاده از نسبت X–Z و نسبت Speed-Z. این فرض که چاله ها تنها یک طرف خودرو را تحت تاثیر قرار می دهند و خوشه بندی فضایی بر روی داده های جمع آوری شده، دقت تشخیص را با کاهش مثبت کاذب بهبود می بخشد. رودروید [ 1] یک سیستم مبتنی بر تلفن هوشمند تجاری برای نظارت بر جاده است. این جاده را بر اساس مقادیر محاسبهشده IRI (شاخص ناهمواری بینالمللی) به خوب، رضایتبخش، نامطلوب و ضعیف طبقهبندی میکند و برای نتایج ادعا میکند که دقت ۸۰ تا ۹۰ درصد است. نوع خودرو و حساسیت پلت فرم تلفن همراه برای محاسبات در نظر گرفته شده است. این سیستم همچنین می تواند به عنوان یک ابزار بازرسی با افزودن دستی اطلاعات در مورد دست اندازها و همچنین گرفتن عکس های فوری از جاده و آپلود آنها در پایگاه داده وب استفاده شود. تصاویر سطح جاده که جمع آوری می شود فقط برای اعتبار سنجی دستی گزارش های وضعیت جاده استفاده می شود و هیچ اطلاعات مفیدی به طور خودکار از آنها استخراج نمی شود. تلفن هوشمندی که برنامه Roadroid را اجرا می کند در شکل 1 نشان داده شده است .

شکل 1. برنامه Roadroid در تلفن هوشمند.
اگرچه این سیستمهای مبتنی بر گوشیهای هوشمند مقرونبهصرفه و مقیاسپذیر هستند، اما اشکال اصلی این سیستمها این است که دادهها را در سطح کیفی اطلاعات 3 یا 4 در مقایسه با سیستمهای لیزری دقیق که سطح کیفیت آن 1 است، تولید میکنند [ 2 ]. تحقیقات باید بر روی استفاده از داده های اضافی، اعم از ناهمگن یا اضافی، تمرکز کند تا امتیاز دقت این سیستم ها را بالا ببرد. طراحیهای قبلی سیستم تحت تسلط عملکرد سیستم [ 7 ، 8 ] بود، اما با قابلیتهای پردازش روزافزون، تلفنها برای انجام وظایف محاسباتی گرانقیمت مانند پردازش تصویر روی برد مجهز شدهاند. این امر امکانات بسیار بیشتری را در جمع آوری داده ها باز می کند. علاوه بر این، نظارت بر جاده ها لوکس پردازش آفلاین را ارائه می دهد.
3. طراحی سیستم
3.1. نمودار بلوک فرآیند
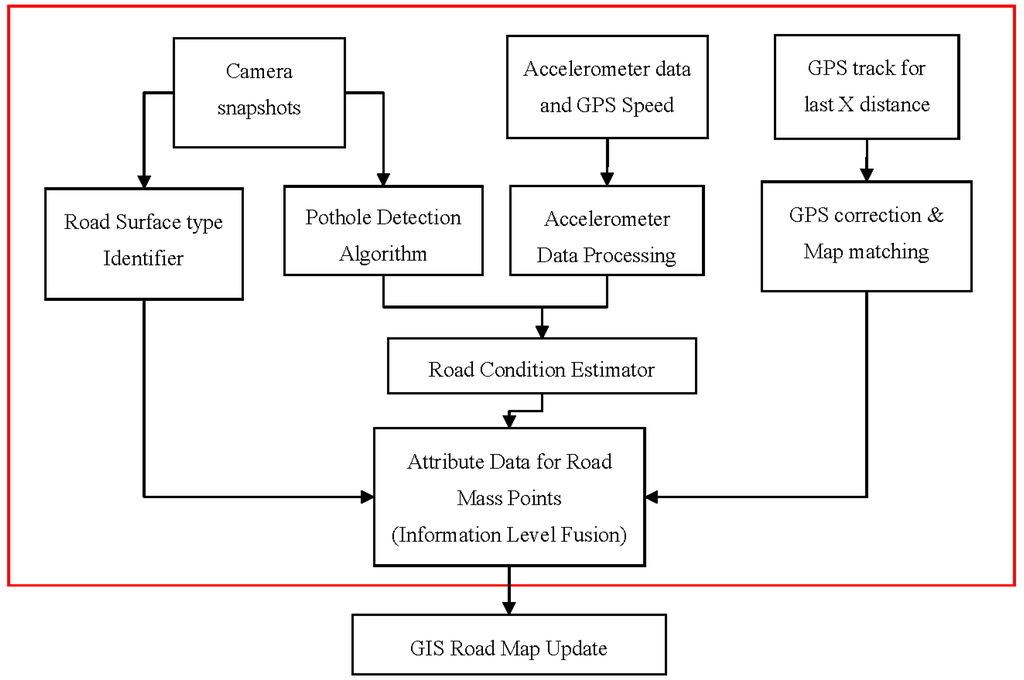
سیستم پیشنهادی از تصاویر دوربین، مسیر GPS و دادههای شتابسنج برای انجام نوع سطح جاده و نقشهبرداری وضعیت جاده بهصورت فضایی صریح استفاده میکند. هدف این سیستم در درجه اول نظارت و به روز رسانی پایگاه داده GIS جاده با اطلاعات ویژگی مناسب است. در حال حاضر این سیستم یک ابزار ارزیابی جاده نیست و تولید داده های درجه مهندسی خارج از محدوده آن است. شکل 2 بلوک های عملکردی سیستم پیشنهادی MAARGHA را نشان می دهد.
تخمین نوع سطح جاده با استفاده از عکس های فوری دوره ای از دوربین انجام می شود. به طور مستقل، تصاویری که گرفته می شوند برای تشخیص چاله ها استفاده می شوند. این اطلاعات اضافی را به رشته برآوردگر وضعیت جاده ارائه می دهد که به صورت موازی با استفاده از داده های شتاب سنج و سرعت GPS انجام می شود. اطلاعات بهدستآمده از تمام رشتههای پردازشی در نهایت با استفاده از موقعیت فعلی ارائه شده توسط الگوریتم تطبیق نقشه GPS در سطح اطلاعات ترکیب میشوند. نتیجه مجموعه ای از نقاط جرم جاده است که داده های ویژگی آنها تولید می شود. سپس می توان از داده های ویژگی برای به روز رسانی مشخصات جاده در پایگاه داده GIS استفاده کرد. این مقاله بر روی بخشی از سیستم که توسط بلوک های فرآیند محدود شده در کادر قرمز در شکل 2 نشان داده شده است، تمرکز می کند .
شکل 2. نمای کلی سیستم MAARGHA.
3.2. طراحی نمونه اولیه
نمونه اولیه با استفاده از یک تلفن هوشمند اندرویدی برای جمعآوری دادهها و یک لپتاپ برای اجرای الگوریتمهای پردازش آفلاین داده توسعه داده شد. تلفن هوشمند بر روی شیشه جلو اتومبیل یا داشبورد نصب شده بود ( شکل 3 را ببینید ) و داده ها با استفاده از یک برنامه ثبت اطلاعات سنسور، در فرکانس های فهرست شده در جدول 1 برای هر سنسور جمع آوری شد. برنامه تلفن هوشمند داده های خام جمع آوری شده از حسگرهای مختلف را با استفاده از مهر زمانی همگام می کند.

جدول 1. فرکانس جمع آوری داده های حسگر.
اسکرین شات برنامه نرم افزاری در حال اجرا بر روی لپ تاپ در شکل 4 نشان داده شده است و نسخه نمایشی آن قابل دسترسی است [ 10 ]. جدول 2 الزامات نرم افزاری و سخت افزاری برای توسعه سیستم پیشنهادی را نشان می دهد.
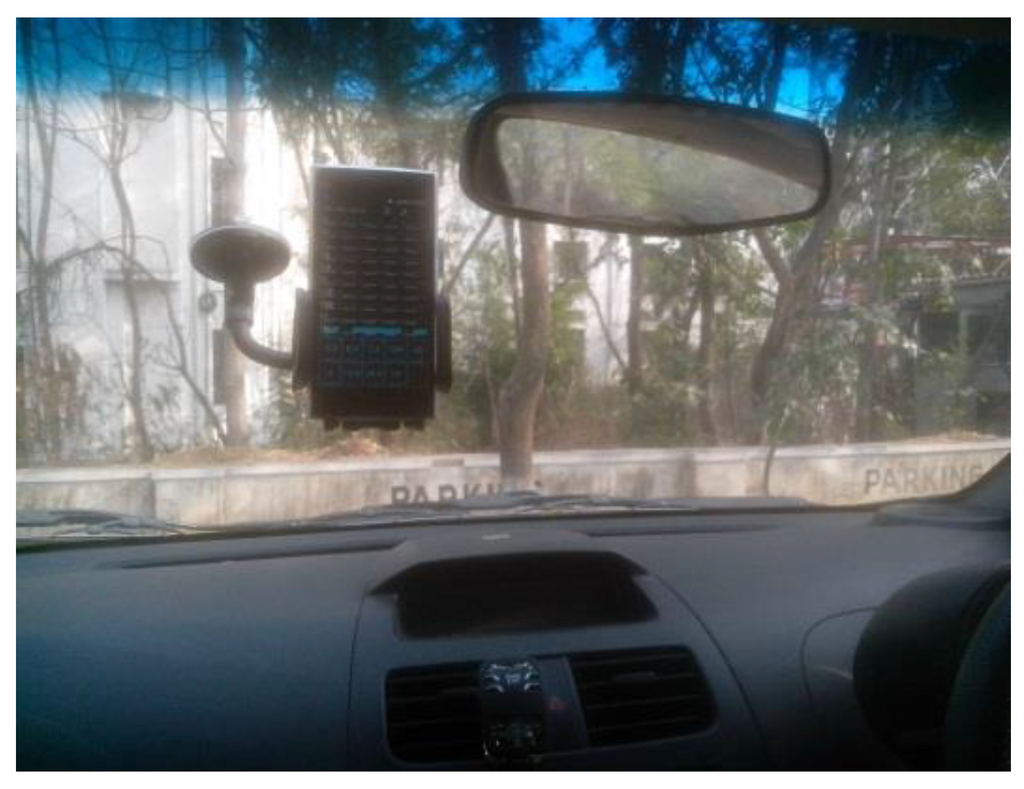
شکل 3. گوشی هوشمند نصب شده روی شیشه جلو با برنامه جمع آوری داده در حال اجرا.
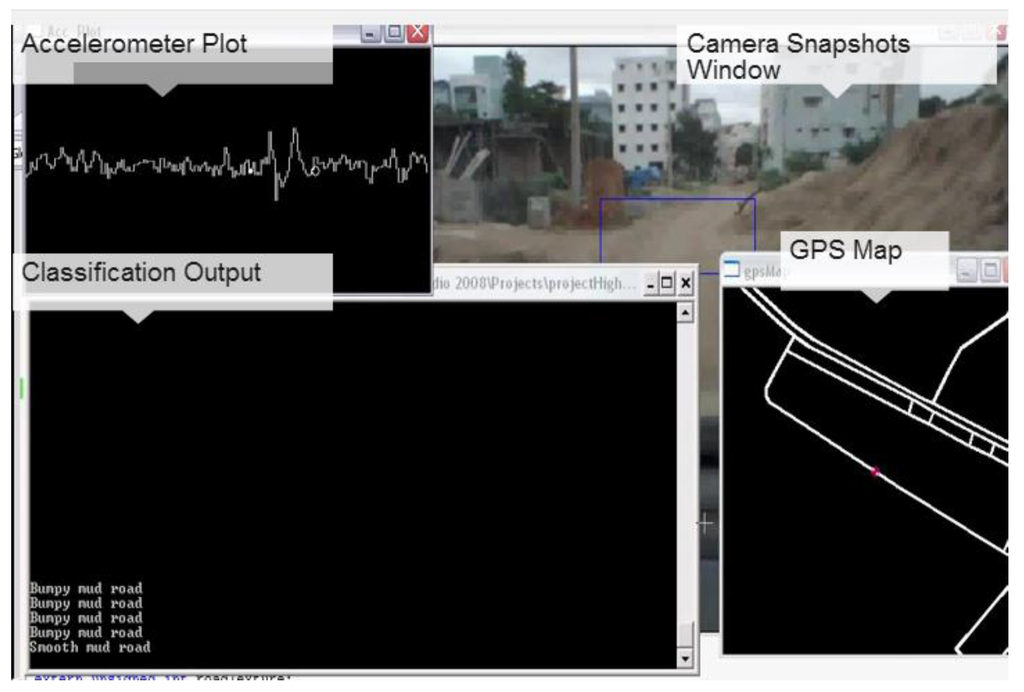
شکل 4. تصویری از برنامه رایانه شخصی.
جدول 2. نرم افزار و سخت افزار سیستم مورد نیاز.
4. روش شناسی
4.1. برآوردگر وضعیت جاده
4.1.1. پردازش داده های شتاب سنج
خوانش های شتاب سنج روشی غیرمستقیم برای یافتن موج های روی سطح جاده با اندازه گیری درجه ارتعاش داخل وسیله نقلیه است. ارتعاشات در امتداد سه محور اندازه گیری می شوند: جهت گرانش ( محور Z )، جهت حرکت وسیله نقلیه ( محور Y ) و جهت موازی با داشبورد ( محور X ). برای سادگی، تلفن هوشمند به دقت در موقعیت مناسبی قرار می گیرد و محورهای X -، Y – و Z تلفن با محورهای اندازه گیری همسو هستند. در عمل قرائت های شتاب سنج باید مانند Nericell تغییر جهت دهند [ 7] بسته به موقعیت نصب. به جز سرعت شکنهای عمدی، ارتعاشاتی که از سیستم تعلیق خودرو عبور میکنند عمدتاً آشفته هستند و در هر سه محور اندازهگیری شتابسنج منعکس میشوند. انحراف استاندارد (SD) قرائتهای شتابسنج در امتداد محورهای X- ، Y- ، و Z ( Ax ، Ay ، Az ) و سرعت GPS به عنوان ویژگی در نظر گرفته میشوند ( σ x ، σy ، σ z ، V g ) . سرعت وسیله نقلیه در نظر گرفته شده در بردار ویژگی، سرعت آنی است. برخلاف P 2 [ 9]، سرعت به عنوان یک ویژگی جداگانه به جای نسبت A z / V g در نظر گرفته می شود زیرا مشخص شده است که نسبت حداکثر ارتعاش دامنه به سرعت در هنگام عبور از قطع کننده های سرعت مشابه در مقادیر مختلف سرعت ثابت نیست ( شکل 5 ) . . شکستن و چرخش وسیله نقلیه تغییرات مداوم خواندن را در Ax و Ay نشان می دهد. از این رو چنین تغییرات آهسته در قرائت ها با استفاده از یک فیلتر بالا گذر حذف می شوند به طوری که فقط داده های فرکانس بالا برای محاسبه SD استفاده می شود. خوانش شتاب سنج در فرکانس 15 هرتز به دست می آید و ویژگی ها در یک پنجره 2 ثانیه استخراج می شوند. یک رویکرد ناپارامتریک اتخاذ شده و سیستم به صورت دستی برای طبقهبندی تحت نظارت آموزش داده میشود. جاده ها به عنوان فقیر، نامطلوب، رضایت بخش و خوب برای آموزش برچسب گذاری شده و نمونه های کافی جمع آوری می شود. بعداً از الگوریتم K-Nearest Neighbor (K-NN) برای طبقه بندی داده های تازه در کلاس های فوق استفاده می شود.
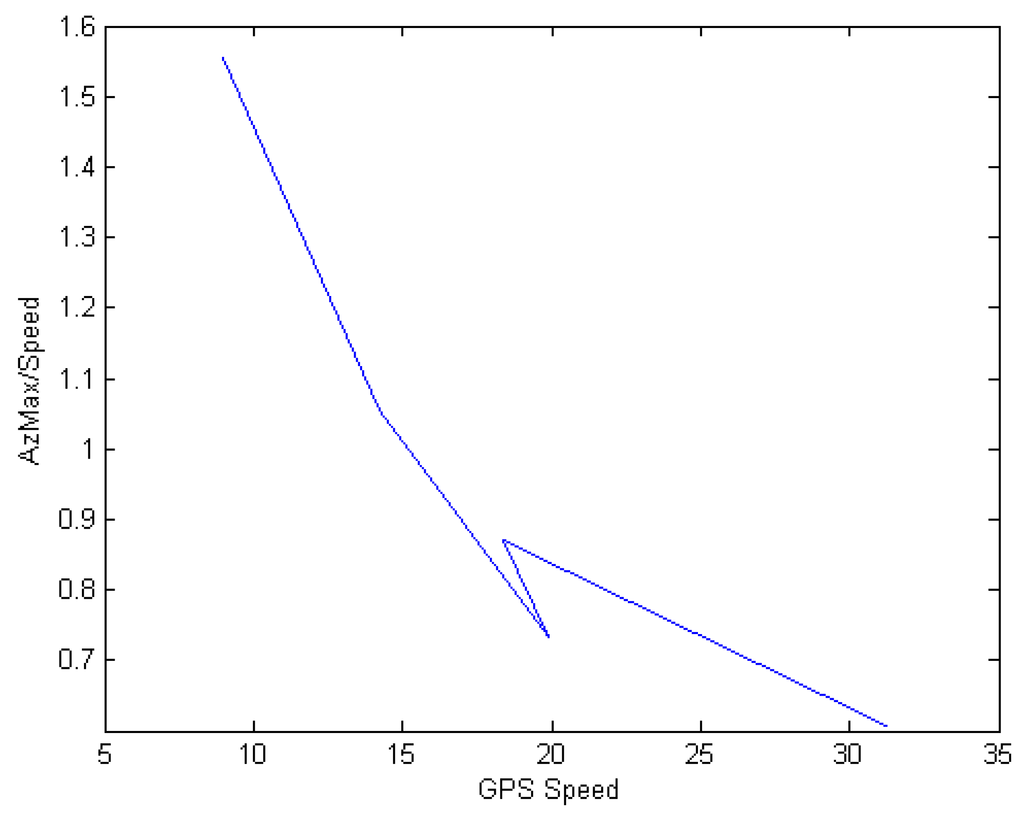
شکل 5. پاسخ ارتعاشی: نمودار نسبت بین A z Max و میانگین سرعت GPS ( V g ) در حین رانندگی از طریق قطع کننده های سرعت مشابه.
4.1.2. تشخیص چاله بر اساس دوربین
هدف اصلی این کار بهبود سطح کیفی اطلاعات وضعیت فعلی هنر در سیستمهای نظارت بر جاده با استفاده از دادههای ناهمگن است. وضعیت بد جاده در عرض جادهها با استفاده از شتابسنج تشخیص داده میشود، اما چالههای پراکنده عمدتاً نادیده گرفته میشوند، زیرا تمایل عمومی برای اجتناب از آنها در حین رانندگی است. در سیستم های فعلی، Nericell [ 7 ] و Roadroid [ 1]، از تصاویر گرفته شده توسط دوربین استفاده نمی شود و فقط به عنوان یک اثبات اعتبار بصری گاه به گاه عمل می کند. عکسهای فوری دوربین معمولاً با فرکانس 0.3 هرتز تا 0.5 هرتز گرفته میشوند و در نتیجه بازرسی دستی ثبت دادههای ارسالی تصویر، بهویژه زمانی که نظارت در یک منطقه وسیع انجام میشود، سربار است. با این حال، با توجه به پیچیدگی صحنه های ضبط شده توسط دوربین داشبورد، تشخیص چاله بر اساس تقسیم بندی تصویر قوی، مشکلی دشوار است. امیر بوزا و همکاران [ 11 ] روشی را برای تشخیص چاله با استفاده از پردازش تصویر و خوشهبندی طیفی برای تخمین تقریبی چالهها پیشنهاد کرد. اوتشو [ 12آستانه بر اساس ] برای انتخاب پیکسل های تیره تر جاده برای تشخیص چاله اعمال می شود. با این حال، چاله ها را نمی توان تنها به عنوان تکه هایی تعمیم داد که دارای پیکسل های تیره تر در داخل مرز در مقایسه با محیط اطراف هستند. رنگ پیکسل های داخلی به جاده یا لایه گلی بستگی دارد که در نتیجه ساییدگی لایه بالایی در معرض دید قرار می گیرد. این میتواند منجر به این شود که پیکسلهای داخلی چالهها دارای شدت پیکسلی یکسان یا حتی بالاتر از محیط اطراف باشند ( شکل 6 ). سیستم پیشنهادی MAARGHA، چالهها را بر اساس ویژگیهای لبهای که روی تصاویر شناسایی میشوند، شناسایی میکند ( شکل 7 ). نتایج تشخیص مبتنی بر تصویر، قرائتهای شتابسنج را در تشخیص چالههای از دست رفته تکمیل میکند.

شکل 6. چاله هایی که به راحتی قابل اجتناب هستند.

شکل 7. ( الف ) چاله در جاده ( ب ) اطلاعات مربوط به لبه.
تلفن هوشمند طوری نصب میشود که دوربین رو به جاده باشد و عکسهای فوری گرفته شده برش داده میشوند تا ناحیه مورد نظر را در فاصله ۱ یا ۲ متری جلوتر از ماشین متمرکز کنند. سپس تصویر فرعی با استفاده از یک فیلتر دوطرفه 5 × 5 صاف می شود که لبه های تیز چاله ها و سایه ها را حفظ می کند. از آنجایی که سایه ها مناطقی با شدت کم هستند ( شکل 8 الف) و به مرز تصویر متصل می شوند، با استفاده از تجزیه و تحلیل مؤلفه های متصل مبتنی بر آستانه شدت شناسایی می شوند ( شکل 8)ب). اگر مناطق سایه دار بیش از 50 درصد تصویر را تشکیل دهند، صحنه برای پردازش بیشتر نادیده گرفته می شود تا از مثبت کاذب جلوگیری شود. در نتیجه، از یک فیلتر کاننی با آستانه گرادیان پایین تجربی 30 برای به دست آوردن لبههای تصاویر فرعی استفاده میشود و خطوط لبه استخراج میشوند. معمولاً از نسبت آستانه گرادیان بالا: پایین 3:1 برای به دست آوردن مقدار آستانه بالاتر استفاده می شود. سطح دوم فیلتر با انتخاب تصاویری انجام می شود که دارای تعداد محدودی n (مقدار تجربی) هستند. به تصاویر انتخاب شده نمره وضعیت جاده نامطلوب اختصاص داده شده است. شبه الگوریتم در زیر در الگوریتم 1 آورده شده است.
| الگوریتم 1. الگوریتم تشخیص چاله |
| مرحله 1: فیلتر دوطرفه 5 × 5 را روی تصویر فرعی I اعمال کنید |
| مرحله 2: اگر پیکسلهایی با مقادیر شدت کمتر از 100 بیش از 50 درصد تصویر فرعی را تشکیل میدهند، I را رد کنید. |
| مرحله 3: تشخیص n کانتور {C 1 , C 2 , …, C n } بر اساس لبه های Canny با مقدار آستانه 90 بالا و 30 پایین |
| مرحله 4: اگر 1 < n < 5 باشد، گودال شناسایی می شود |
تصاویر ارواح به دلیل انعکاس روی شیشه جلوی خودرو شکل می گیرند و این تصاویر باید از مجموعه ورودی به الگوریتم فیلتر شوند. از موقعیت خورشید نسبت به خودرو می توان برای تشخیص چنین تصاویر احتمالی و نادیده گرفتن آنها استفاده کرد. اشکال خطی مانند علامت گذاری خطوط را می توان با استفاده از نسبت کوچک طول به عرض یک جعبه محدود حذف کرد. با این حال، چنین پیشرفتهایی جزییات عملیاتی هستند و در محدوده این کار پیادهسازی نشدهاند.

شکل 8. ( الف ) منطقه سایه دار در امتداد جاده، ( ب ) تقسیم بندی بر اساس شدت.
برآوردگر وضعیت جاده، هر دو طبقهبندی مبتنی بر شتابسنج و الگوریتم تشخیص چاله را برای ارائه خروجی چهار طبقه، با اولویت الگوریتم دوم در مواردی که طبقهبندی بدتر از روش قبلی است، میگیرد.
4.2. طبقه بندی نوع سطح جاده با استفاده از دوربین
4.2.1. تشخیص نوع سطح جاده بر اساس هیستوگرام
بر اساس ترکیب مصالح ساختمانی مورد استفاده، جاده ها به رنگ های مختلف ظاهر می شوند. کارهای زیادی در حوزه سیستم های ناوبری خودمختار انجام شده است (بررسی توسط Vipul و همکاران [ 13 ، 14 ])، اما بیشتر برای تمایز بین مناطق جاده ای و غیر جاده ای انجام شده است. محتوای رنگ، ویژگیهای رنگ و ویژگیهای اضافی مانند مرز جاده [ 6 ] و مدلسازی منطقه جاده مبتنی بر حسگرهای عمق در تشخیص جاده استفاده شدهاند. اما مشکل موجود این است که جاده شناسایی شده را به انواع مختلف مواد سطحی مانند قیر، بتن و گل طبقه بندی کنیم. این یک مشکل طبقه بندی رنگ در فضای باز است. روش های مورد بحث در [ 15] رویکردهای پارامتریک و ناپارامتریک را برای طبقه بندی رنگ در فضای باز اتخاذ کرده اند و می توانند در زمینه شناسایی نوع سطح جاده اعمال شوند. روش های پارامتریک [ 16 ، 17 ، 18 ، 19 ، 20 ، 21 ، 22 ] رنگ را بر اساس مدل های روشنایی پیش بینی می کنند در حالی که روش های ناپارامتریک [ 23 ، 24 ، 25 ، 26] آموزش مبتنی بر نمونه و رژیم طبقه بندی را دنبال کنید. بعدها با موفقیت برای تخمین نوع سطح جاده در سیستم پیشنهادی به دلیل ردپای محاسباتی کوچکتر آن اعمال شده است. مشکل طبقه بندی اگر در دو مرحله انجام شود، ساده می شود. اول، تمایز بین جاده های قیر در مقابل جاده های گلی/بتنی بر اساس توزیع شدت صحنه است. در مرحله دوم جاده های گلی بسته به رنگارنگی تصویر از جاده های بتنی متمایز می شوند.
تصویر به فضای رنگی HSI تبدیل میشود و هیستوگرامها برای مولفههای Saturation و Intensity تصویر فرعی محاسبه میشوند. سپس هیستوگرام های شدت به عنوان ویژگی در طبقه بندی مرحله اول استفاده می شوند. در شرایط آسمان باز، مقادیر شدت جادههای گلی و بتنی بیشتر از جادههای قیر/قیر است. فضای رنگی HSI نزدیکترین فضا به درک انسان از رنگها است و از این رو رنگ معمولاً برای طبقهبندی رنگ استفاده میشود [ 27 ]]. با این حال، HSI که یک فضای رنگی استوانهای است، جزء رنگی که رنگ جسم را توضیح میدهد، با کاهش اشباع و شدت ناپایدار است. در حالی که اشباع ثابت است و رنگارنگ بودن صحنه را توصیف می کند. بنابراین، هیستوگرام کانال اشباع به عنوان یک بردار ویژگی برای آموزش سیستم برای تمایز بین جاده های گلی و بتنی در طبقه بندی مرحله دوم استفاده می شود. تفاوت مشخص بین مقادیر اشباع جاده های گلی و بتنی در هیستوگرام کانال اشباع نشان داده شده در شکل 9 و شکل 10 مشاهده می شود.. مجموعه داده آموزشی مورد استفاده برای طبقهبندی مرحله اول با جمعآوری هیستوگرامهای کانال با شدت کافی از نمونههای کلاس تار، گل و بتن و برچسبگذاری آنها به عنوان جفت گل-بتن یا قطران ساخته میشود. مجموعه داده آموزش مرحله دوم با جمع آوری نمونه های هیستوگرام کانال اشباع کلاس های گل و بتن ساخته شده است. در طول طبقه بندی، اگر طبقه بندی مرحله اول منجر به جفت گل و بتن شود، طبقه بندی مرحله دوم برای تمایز بین گل و بتن مورد استفاده قرار می گیرد.
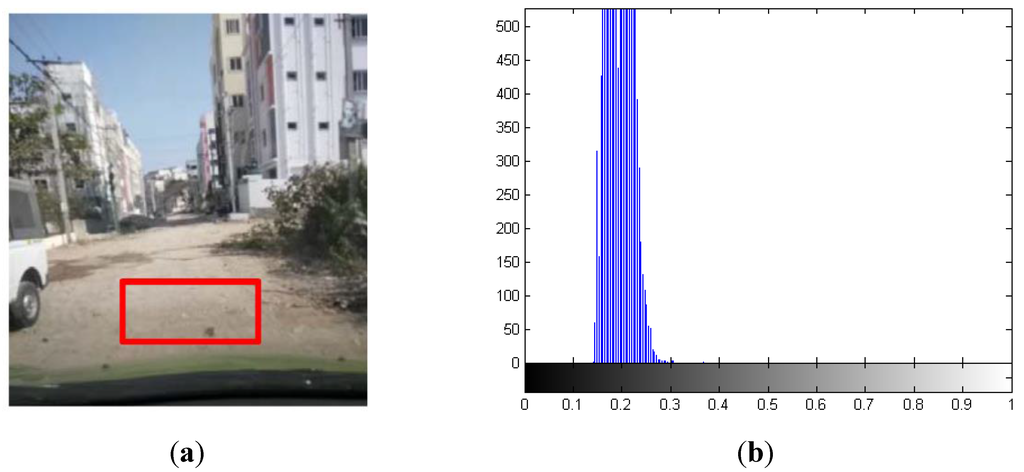
شکل 9. ( الف ) نمونه جاده گلی و ( ب ) هیستوگرام کانال اشباع آن.
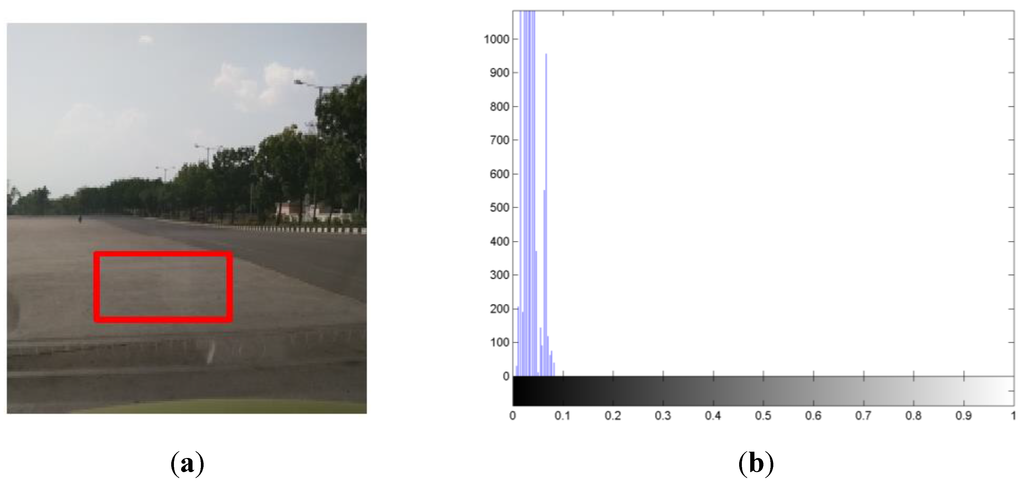
شکل 10. ( الف ) نمونه جاده بتنی و ( ب ) هیستوگرام کانال اشباع آن.
4.2.2. متریک فاصله هیستوگرام
انجام طبقه بندی رنگ با استفاده از هیستوگرام نیاز به اندازه گیری شباهت هیستوگرام دارد. تعدادی معیار فاصله وجود دارد که برای مقایسه هیستوگرام استفاده می شود. مقاله [ 28 ] در مورد شکست متریک فاصله اقلیدسی در ابعاد بالاتر صحبت می کند. آهرین و همکاران [ 29 ] فاصله Bhattacharyya (معادله 1) را برای مقایسه هیستوگرام در مقایسه با روش معروف فاصله Chi-Squared پیشنهاد می کند. فاصله Bhattacharyya صفر به معنای تطابق کامل است در حالی که فاصله 1 به معنای عدم تطابق کامل است. این متریک فاصله برای انجام یک طبقه بندی K-NN با استفاده از مجموعه داده آموزشی استفاده می شود.
دB h a t t a c h a r yyآ(اچ1،اچ2) =1 – ∑اچ1( من ) ⋅اچ2( من )––––––––––√∑مناچ1( من ) ⋅∑مناچ2( من )––––––––––––––––√––––––––––––––––––––––––⎷دبساعتآتیتیآجساعتآ���آ(اچ1،اچ2)=1–∑اچ1(من)⋅اچ2(من)∑مناچ1(من)⋅∑مناچ2(من)
اچ( من )اچ(من)اشاره به ارزش منتی ساعتمنتیساعتbin هیستوگرام
4.3. تطبیق نقشه تیک های GPS
برای ارتباط دقیق مشخصات جاده و نوع سطح داده ها با کشش صحیح جاده، از داده های GPS استفاده می شود. اما جی پی اس های تجاری رایج که در تلفن های همراه استفاده می شود دقت کمتری دارند و ممکن است در هنگام رانندگی در خیابان ها بازتاب چند مسیری را نیز تجربه کنند. بنابراین تیک های GPS به دست آمده توسط دستگاه ها به صورت تصادفی در دو طرف بخش جاده توزیع می شوند. یک الگوریتم تطبیق نقشه آنلاین ساده، که به عنوان “الگوریتم 2” در [ 30 ] مورد بحث قرار گرفته است، استفاده می شود. تیکهای خام جیپیاس به نزدیکترین بخش جاده که موازی با جهت حرکت وسیله نقلیه است، همانطور که از دادههای عنوان مشتق شده است، میچسبند ( شکل 11).). وضوح خوبی از داده های جاده انتخاب می شود به طوری که خطوط مجزای مرکز جاده در امتداد جهت رانندگی وسیله نقلیه در دسترس هستند (دو خط مرکزی اگر جاده دو طرفه باشد).

شکل 11. تطبیق نقشه GPS (AB و CD بخش های جاده هستند. p1، p2، p3، p4 و p5 مختصات GPS خام هستند. q1، q2، q3، q4 و q5 نقاط GPS مطابق نقشه هستند).
تطبیق نقشه پست، برای هر نقطه GPS منحصر به فرد، آخرین نتایج از وضعیت جاده و طبقه بندی نوع سطح جاده بسته به مهر زمانی نقطه داده GPS مرتبط است. نتیجه مجموعه ای از نقاط GPS به نام نقاط جرم جاده است که ویژگی های وضعیت جاده و نوع سطح جاده در دسترس است. این ترکیب سطح اطلاعات نتایج بدست آمده از ماژول های مختلف را نشان می دهد و می تواند برای به روز رسانی یک سیستم اطلاعات جاده استفاده شود.
5. نمایش و نتایج
5.1. مجموعه داده ها
مجموعه آموزشی در محلی نزدیک در حیدرآباد هند با رانندگی در انواع مختلف جاده ها و طبقه بندی دستی نوع سطح جاده و وضعیت جاده ایجاد شد. نمونه های کافی برای انواع سطح آسفالت/قطر، بتن و گل و همچنین برای شرایط مختلف جاده جمع آوری شد. هر دو داده های آموزشی در فایل های متنی جداگانه ذخیره شدند و با استفاده از مهرهای زمانی همگام شدند.
داده های جمع آوری شده بر اساس اطلاعات تصویری موجود در دو مجموعه گروه بندی شدند. اولین گروه از مجموعههای داده در بخشهایی از جادهها که مناطق سایهدار کمی داشتند و در شرایط آسمان صاف (Ideal Data) جمعآوری شد. دسته دوم داده ها دارای شکاف های زیادی از نظر سایه ها، اختلالات در مسیر، نوع سطح جاده نامشخص و غیره هستند ( شکل 12 را ببینید ). سیستم با استفاده از یک بخش از داده های ایده آل و طبقه بندی انجام شده برای همه شرایط آموزش داده شد ( جدول 3 ).

شکل 12. شرایط دید ایده آل جاده – مجموعه داده 1 ( ردیف بالا ). و نماهای به هم ریخته با سطح جاده نامشخص – مجموعه داده 2 ( ردیف پایین ).
جدول 3. تعداد نمونه های آموزشی برای کلاس های وضعیت جاده و نوع سطح.
5.2. نتایج
حالت طبقهبندی برنامه، دادههای حسگر را میگیرد و یک طبقهبندی K-NN را هم برای وضعیت جاده و هم برای دادههای نوع سطح جاده انجام میدهد. مقدار K بر اساس دقت نتایج پس از آزمایش با مقادیر مختلف K به عنوان 5 انتخاب شد. برای جلوگیری از طبقه بندی نادرست زمانی که وسیله نقلیه ساکن است، طبقه بندی تنها زمانی انجام می شود که سرعت وسیله نقلیه بیش از 3 کیلومتر در ساعت باشد. افسانه نتایج نقشه برداری وضعیت جاده و نوع سطح در شکل 13 نشان داده شده است . نتایج ارائه شده در شکل 14 ، شکل 15 ، شکل 16 ، شکل 17 ، شکل 18 ، شکل 19 و شکل 20با راندن وسیله نقلیه نصب شده با راهاندازی در مجموع حدود 4 کیلومتر در یک محل نزدیک به دست آمد (نمونه نمایشی در [ 10 ] موجود است). محل بر اساس در دسترس بودن انواع مختلف سطح جاده و کلاس های وضعیت جاده انتخاب شد. طبقه بندی نوع سطح جاده و وضعیت جاده هر 2 ثانیه انجام می شود.
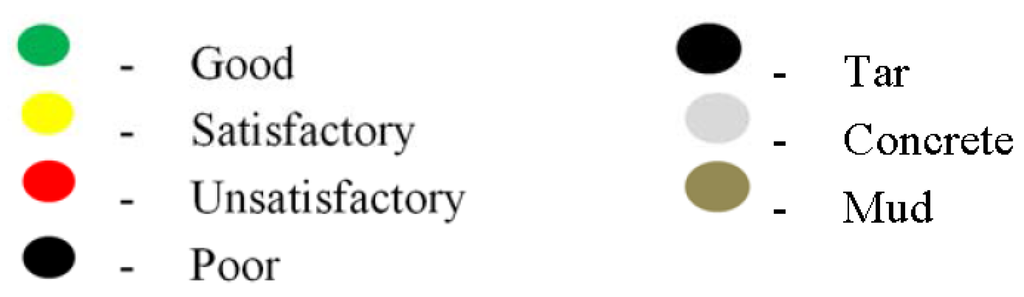
شکل 13. افسانه برای وضعیت جاده و نقشه برداری از نوع سطح.

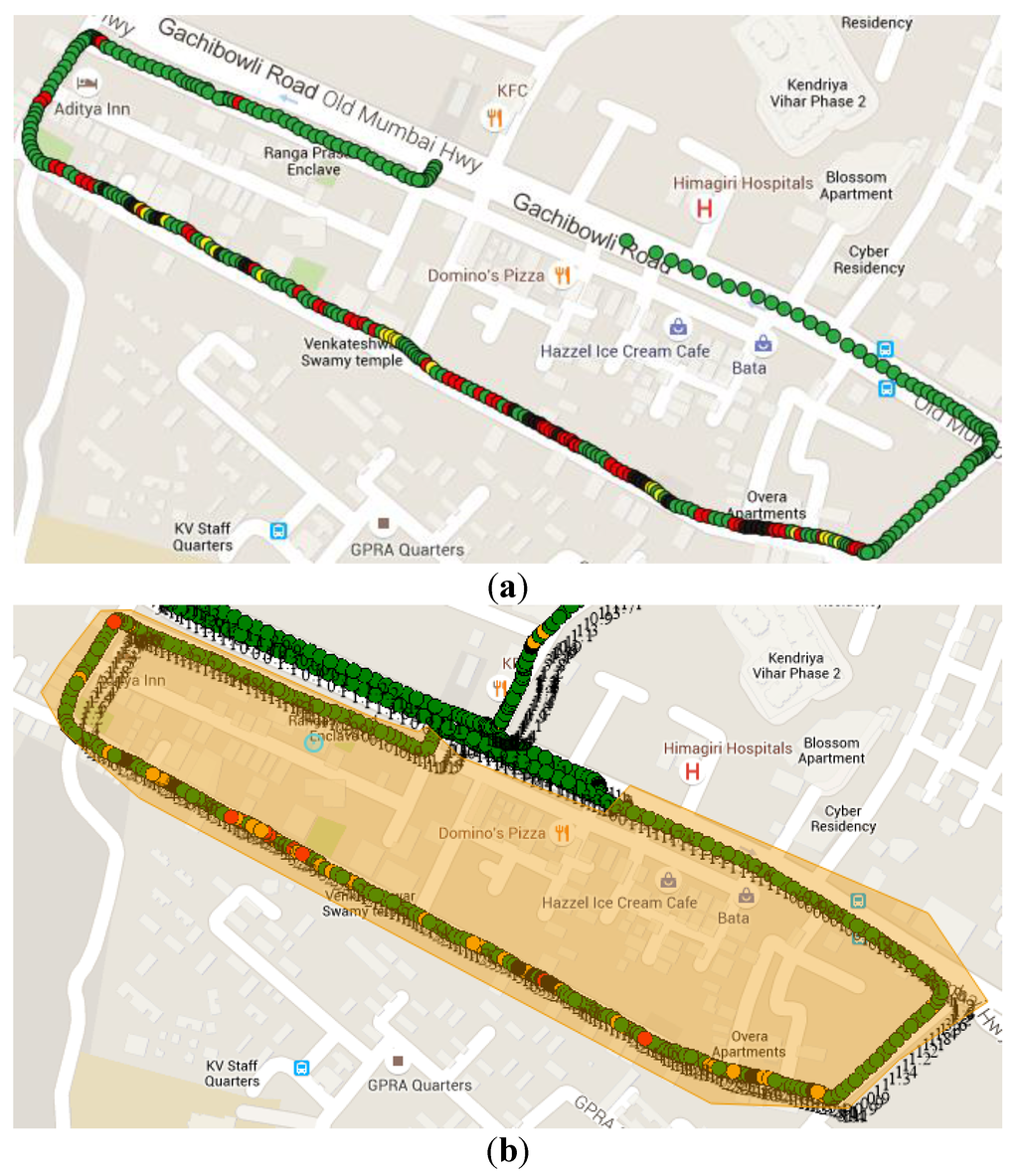
شکل 14. نقشه نوع سطح جاده برای مجموعه داده 1 (چند عکس فوری از سورتی در سمت چپ و راست نقشه نشان داده شده است) – عمدتاً از جاده آسفالت و بتنی تشکیل شده است.

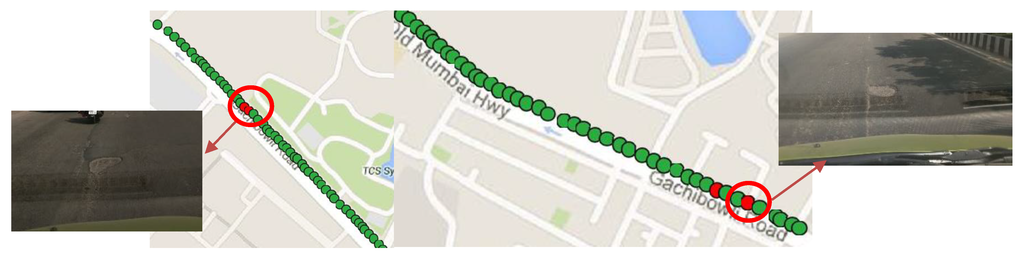
شکل 15. نقشه نوع سطح جاده برای مجموعه داده 2 (دایره قرمز مجموعه ای از طبقه بندی اشتباه را نشان می دهد در حالی که دایره سبز برخی از نتایج طبقه بندی صحیح را نشان می دهد) – عمدتاً یک جاده گلی که یک بخش آن جاده آسفالت است.

شکل 16. مقایسه نتایج برای جاده عمدتاً هموار. ( a ) نقشه نتایج وضعیت جاده از MAARGHA است، در حالی که ( b ) از Roadroid است (عکس از سرور ابری آن).

شکل 17. مقایسه نتایج برای جاده نسبتا ناهموار. ( a ) نقشه نتایج وضعیت جاده از MAARGHA است (تصویر فرعی: خوانشهای شتابسنج)، در حالی که ( b ) از Roadroid است (عکس از سرور ابری آن).
شکل 18. مقایسه نتایج برای جاده بسیار ناهموار. ( a ) نقشه نتایج وضعیت جاده از MAARGHA است، در حالی که ( b ) از Roadroid (نمایش از سرور ابری آن).

شکل 19. نتایج Roadroid که وضعیت جاده 100% صاف را برای بخشی از جاده که دارای چاله های جزئی است نشان می دهد.
شکل 20. نتایج شتابسنج MAARGHA تکمیل شده با تشخیص چاله که برخی از نقاط وضعیت جاده نامطلوب را نشان میدهد (دایرههای قرمز برخی از چالههای شناسایی شده هستند که با عکسهای فوری آنها نشان داده شدهاند).
5.2.1. نتایج طبقه بندی نوع سطح جاده
دقت طبقهبندی نوع سطح جاده با محاسبه درصد طبقهبندی صحیح مطابق با معادله (2) در برابر حقیقت زمینی تولید شده به صورت دستی اندازهگیری شد. موارد مثبت واقعی تعداد مواردی است که الگوریتم با طبقه بندی دستی مطابقت دارد. موارد مثبت کاذب تعداد مواردی است که نوع سطح به اشتباه طبقه بندی شده است. منفی درست و نادرست صفر در نظر گرفته شد زیرا در این سناریو نمی توان آنها را اندازه گیری کرد. نتایج طبقه بندی جاده برای دو گروه مجموعه داده در زیر ارائه شده است.
A c c =( تیپ+ تین)( تیپ+ تین+ افپ+ افن)× 100آجج=(تیپ+تین)(تیپ+تین+افپ+افن)×100
شکل 14 و جدول 4 یک نتیجه 100٪ دقیق طبقه بندی نوع سطح را در شرایط آسمان صاف و زمانی که هیچ منطقه سایه ای وجود ندارد نشان می دهد. شکل 15 نتایج حاصل از مجموعه داده 2 را نشان می دهد، جایی که بخش بزرگتری از کشش جاده مملو از سایه های ساختمان است که منجر به طبقه بندی نادرست شده است. جدول 5 نتایج را خلاصه می کند و دقت اولیه 51% را نشان می دهد. با توجه به اینکه مجموعه داده ایده آل برای آموزش استفاده شده است، سطوح جاده سایه دار تمایل دارند که طبق شکل 15 به عنوان کلاس قیر/قیر طبقه بندی شوند .. نکات مثبت واقعی در بخش هایی از جاده بدون سایه رخ می دهد. از آنجایی که نوع سطح جاده اغلب تغییر نمی کند، نتایج طبقه بندی نادرست توزیع شده پراکنده را می توان با استفاده از اطلاعات محله یا انتخاب دستی نتایج عجیب و غریب تصحیح کرد. در این مورد، حدود هفت مورد از این قبیل را می توان شناسایی و حذف کرد و دقت را به 60٪ رساند. با این حال، فیلتر کردن نتایج حاصل از پروازهای متعدد بر اساس زمان از روز میتواند تأثیر سایهها را به میزان قابل توجهی به حداقل برساند.
5.2.2. نتایج طبقه بندی وضعیت جاده
نتایج ارائه شده در اینجا از هر دو سیستم MAARGHA پیشنهادی و سیستم Roadroid [ 1 ] است که با جمعآوری دادهها در همان زمان برای همان کشش از بخشهای جاده به دست آمده است. این راهاندازی به دو گوشی هوشمند برای نصب روی شیشه جلوی خودرو نیاز داشت، یکی از آنها برنامه Roadroid را اجرا میکرد و دیگری برنامه جمعآوری دادههای مورد استفاده MAARGHA را اجرا میکرد. در حالی که شکل ها یک مقایسه بصری از نتایج به دست آمده را ارائه می دهند، جدول مربوطه عملکرد این دو سیستم را جدول بندی و ارائه می کند. تخمین تقریبی از حقیقت زمینی از ضبط میکروفون راننده وسیله نقلیه در حین انجام آزمایش ها مشخص شد.
جدول 4. طبقه بندی نوع سطح جاده برای مجموعه داده 1.
جدول 5. طبقه بندی نوع سطح جاده برای مجموعه داده 2.
وضعیت جاده در شکل 16 و جدول 6 نشان دهنده همبستگی بالا بین سیستم های MAARGHA و Roadroid برای جاده های عمدتاً هموار است. در جادههای متناوب با لکههای ناهموار ( شکل 17 و جدول 7 ) هر دو سیستم لکههای بد مشابه (ضعیف) را شناسایی کردند، اما در طبقهبندی وضعیت جاده کمی متفاوت هستند. تعداد کمی از نقاط توده جادهای که در رودوید بهعنوان «خوب» و «رضایتبخش» طبقهبندی شدهاند، در «MAARGHA» بهعنوان «نارضایتکننده» طبقهبندی شدهاند. با بررسی قرائتهای شتابسنج در چنین مواردی، مشاهده میشود که خودرو در هنگام حرکت آهسته در نقاط بد ممتد جاده، چرخش بدنه بیشتری نسبت به حرکت عمودی تولید میکند. خط زرد در تصویر فرعی ازشکل 17 شتاب جانبی در امتداد محور X مربوط به رول بدنه خودرو است. به نظر می رسد رودروید نسبت به این حرکت جانبی حساسیت کمتری دارد. به غیر از این تفاوت ها، نتایج هر دو سیستم برای بخش های ضعیف و هموار جاده با یکدیگر مطابقت دارند. با توجه به حقیقت زمینی ثبت شده در میکروفون، سومین نتیجه مقایسه مربوط به کشش جاده ای است که وضعیت جاده ناهموار قابل توجهی دارد. این امتداد جاده شامل جاده گلی ناهموار در ابتدا و جاده هموارتر به سمت انتهای آن بود. مطابق نتایج ( شکل 18 و جدول 8) .) Roadroid از روند مشابهی در اختصاص امتیازهای “خوب” و “رضایت بخش” بیشتر در مقایسه با MAARGHA پیروی می کند، در حالی که دومی نتایج “نارضایت بخش” بیشتری تولید کرد. به طور کلی، هر دو سیستم با پاسخ مشابه به جاده های هموار و پاسخ کمی واگرا به جاده های ناهموار که به صورت بصری از شکل 16 ، شکل 17 و شکل 18 مشاهده می شود، قابل مقایسه هستند . هر دو سیستم با موفقیت ناهنجاری های اصلی جاده را شناسایی می کنند و بنابراین اطلاعات مهم مورد انتظار از یک بررسی جاده را ارائه می دهند.
5.2.3. نتایج تشخیص چاله
سیستم پیشنهادی از تصاویر بهدستآمده از دوربین گوشیهای هوشمند برای شناسایی چالههایی استفاده میکند که معمولاً تنها با رویکرد شتابسنج از بین میروند. در بخش هایی از جاده ها که نتایج بر اساس شتاب سنج از MAARGHA و نتایج از Roadroid ( شکل 19 ) 100٪ جاده های “خوب” را نشان می دهد، شناسایی مبتنی بر تصویر به شناسایی چاله های از دست رفته کمک کرد. از آنجایی که فرکانس عکس های فوری 0.5 هرتز است، به طور کلی اجرای چندگانه ( شکل 20 نتایج MAARGHA را از یک اجرا نشان می دهد) 100٪ تشخیص ایجاد می کند. نتیجه نهایی طبقه بندی با اطلاعات اضافی حسگر واقعی تر است و به سمت زمین نزدیک تر می شود. نتایج ترکیبی MAARGHA و Roadroid در جدول 9 خلاصه شده است.
جدول 6. گزارش مقایسه 1.
جدول 7. گزارش مقایسه 2.
جدول 8. گزارش مقایسه 3.
جدول 9. گزارش مقایسه ای که اهمیت تشخیص گودال بر اساس تصویر را نشان می دهد.
6. نتیجه گیری
سیستم توسعه یافته مبتنی بر ترکیب اطلاعات چند سنسوری در اینجا یک راه منحصر به فرد و ساده برای طبقه بندی جاده ها ارائه می دهد. همیشه بین پیچیدگی محاسباتی، سهولت اجرا و دقت نتایج بهدستآمده در حین ساختن یک سیستم تعادل وجود دارد. در حالی که الگوریتمهای بسیار پیچیده ممکن است دقت بالایی ارائه دهند، نیازهای محاسباتی و پیادهسازی چنین الگوریتمهایی در موبایل یا سایر پلتفرمهای ساده ممکن است کاملاً چالشبرانگیز باشد. در سیستم پیشنهادی، حسگرهای شتابسنج و دوربین به جمعآوری دادهها برای انجام طبقهبندی کمک کردند، در حالی که GPS برای برچسبگذاری دقیق جغرافیایی و بهروزرسانی پایگاه داده GIS فراهم میکرد. علاوه بر این، تمام سنسورهای مورد استفاده در این برنامه مشترک هستند و در یک تلفن هوشمند مدرن موجود هستند.
نتایج نشان میدهد که سیستم پیشنهادی به خوبی با وضعیت فعلی سیستمهای هنری مقایسه میشود که سطوح اطلاعاتی 3 و 4 را تولید میکنند. استفاده از تصاویر به شناسایی اطلاعاتی که معمولاً توسط سیستمهای معمولی از دست میرود کمک میکند، بنابراین سطح اطلاعات را بیشتر بهبود میبخشد. این تصاویر همچنین به ارائه اطلاعات اضافی مانند نوع سطح جاده کمک کرد، بنابراین تنوع اطلاعات را بهبود بخشید. اگرچه سیستم پیشنهادی در حال حاضر یک راه حل درجه مهندسی نیست، اما می توان آن را به طور بالقوه برای اندازه گیری ابعاد دقیق چاله ها گسترش داد، مشروط بر اینکه از یک دوربین کالیبره شده استفاده شود. همچنین، سیستم پیشنهادی بازرسی دستی آسان تصاویر جادهای بد را برای پروژههای بزرگ نظارت بر جادهها امکانپذیر میسازد.
کار بیشتر از طریق آزمایشات میدانی گسترده برای ارزیابی بسیاری از شرایط میدانی دیگر و بهبود الگوریتم های اکتشافی برای ارائه یک سیستم عملیاتی MAARGHA مورد نیاز است. روشهای الگوریتمی را میتوان برای فیلتر کردن و حذف دادههای با کیفیت پایینتر به ویژه با توجه به شلوغی تصاویر معرفی کرد. رشته طبقه بندی نوع سطح برنامه به روشنایی صحنه دوربین بستگی دارد. دقت طبقه بندی را می توان با استفاده از سنسورهای درخشندگی اضافی برای تنظیم حساسیت دوربین بهبود بخشید. از سوی دیگر، با توجه به سهولت کاربرد سیستم، چندین نقطه داده برای هر مکان، از جمله در زمانهای مختلف روز، میتواند توسط چندین کاربر سیستم تولید شود – یک شرایط ایدهآل برای استفاده از این برنامه در یک پلتفرم منبعجمعی از تولید و بهروزرسانی سیستم اطلاعات جادهای مبتنی بر GIS. دومی منجر به وضعیتی می شود که در آن بهبود دقت طبقه بندی جاده ها صرفاً به یک چالش عملیاتی تبدیل می شود. به طور کلی، سیستم پیشنهادی سهم ارزشمندی در رفع نیازهای سازمانهای تعمیر و نگهداری جادهها مانند شرکتهای شهرداری، مقامات بزرگراه و پیشرفتها در فناوریهای تصویربرداری و حسگر برای نظارت جادهها در همه سطوح فراهم میکند.
منابع
- جونز، اچ. نظارت مستمر وضعیت جاده Forslof، L. Roadroid با گوشی های هوشمند. در مجموعه مقالات پنجمین کنفرانس منطقه ای SARF/IRF، پرتوریا، آفریقای جنوبی، 2 تا 4 سپتامبر 2014.
- Sayers، MW; Gillespie, TD آزمایش بینالمللی ناهمواری جاده: ایجاد همبستگی و استاندارد کالیبراسیون برای اندازهگیریها . بانک جهانی: واشنگتن، دی سی، ایالات متحده آمریکا، 1986; پ. 45. [ Google Scholar ]
- وانگ، KCP; اسمادی، او. فناوریهای تصویربرداری خودکار برای بررسیهای پریشانی روسازی ؛ هیئت تحقیقات حمل و نقل: واشنگتن، دی سی، ایالات متحده آمریکا، 2011. [ Google Scholar ]
- یو، اس.-جی. سوکومار، اس آر؛ کوشان، اف. صفحه، DL; عابدی، MA بازسازی سه بعدی سطوح جاده با استفاده از رویکرد چندحسی یکپارچه. در اپتیک و لیزر در مهندسی ; Elsevier: Knoxville، TN، ایالات متحده آمریکا، 2007; جلد 45، ص 808–818. [ Google Scholar ]
- کاغذ سفید اسکنر نمایه روسازی (PPS). در دسترس آنلاین: http://www.phnx-sci.com/ (دسترسی در 20 ژوئیه 2015).
- شمس آبادی، س.س. وانگ، ام ال. Birken, R. Pavemon: یک سیستم پایش روسازی مبتنی بر GIS با استفاده از مقادیر زیادی از دادههای حسگر ژئوفیزیک نزدیک به سطح. در مجموعه مقالات بیست و هفتمین سمپوزیوم سالانه کاربرد ژئوفیزیک در مسائل مهندسی و محیطی (SAGEEP)، بوستون، MA، ایالات متحده آمریکا، 16 مارس 2014.
- موهان، پ. Padmanabhan، VN; Ramjee, R. Nericell: نظارت کامل بر شرایط جاده و ترافیک با استفاده از تلفن های هوشمند تلفن همراه. در مجموعه مقالات ششمین کنفرانس ACM در مورد سیستم های حسگر شبکه جاسازی شده، رالی، NC، ایالات متحده، 4 تا 7 نوامبر 2008.
- بوراسکار، ر. وانکاهارا، ن. رامان، بی. Kulkarni، P. Wolverine: برآورد وضعیت ترافیک و جاده با استفاده از حسگرهای تلفن هوشمند. در مجموعه مقالات چهارمین کنفرانس بین المللی 2012 در مورد سیستم ها و شبکه های ارتباطی (COMSNETS 2012)، بنگلور، هند، 3 تا 7 ژانویه 2012.
- اریکسون، جی. جیرود، ال. هال، بی. نیوتن، آر. مدن، اس. بالاکریشنان، اچ. گشت چاله: استفاده از شبکه حسگر سیار برای نظارت بر سطح جاده. در مجموعه مقالات ششمین کنفرانس بین المللی سیستم های تلفن همراه، برنامه ها و خدمات، برکنریج، CO، ایالات متحده آمریکا، 17-20 ژوئن 2008.
- برآورد وضعیت و بافت جاده در دسترس آنلاین: https://www.youtube.com/watch?v=geu6IoKTqw4&list=UUjh7yE6kU9HPVF9FqdspqcQ (در 17 ژوئیه 2015 قابل دسترسی است).
- بوزا، ای. اومانوویچ، اس. Huseinovic، A. تشخیص چاله با پردازش تصویر و خوشه بندی طیفی. در مجموعه مقالات دومین کنفرانس بین المللی فناوری اطلاعات و شبکه های کامپیوتری (ITCN ’13)، آنتالیا، ترکیه، 8 تا 10 اکتبر 2013.
- ژانگ، جی. Hu, J. تقسیم بندی تصویر بر اساس روش 2 بعدی Otsu با تجزیه و تحلیل هیستوگرام. در مجموعه مقالات کنفرانس بین المللی 2008 در علوم کامپیوتر و مهندسی نرم افزار، ووهان، چین، 12-14 دسامبر 2008.
- Mistry، VH; Makwana, R. Survey: تکنیک های تشخیص جاده مبتنی بر دید. بین المللی جی. کامپیوتر. علمی Inf. تکنولوژی 2014 ، 5 ، 4741-4747. [ Google Scholar ]
- ژانگ، جی. Nagel، H.-H. تقسیم بندی تصاویر جاده بر اساس بافت در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند، پاریس، فرانسه، 24 تا 26 اکتبر 1994.
- Buluswar، SD; Draper، BA تشخیص رنگ در تصاویر فضای باز. در مجموعه مقالات ششمین کنفرانس بین المللی بینایی کامپیوتر (IEEE Cat. No.98CH36271)، بمبئی، هند، 7 ژانویه 1998.
- آلوارز، جی.ام. لوپز، ا. بالدریچ، آر. تقسیمبندی جاده مبتنی بر مدل ثابت-روشن. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE، آیندهوو، هلند، 4 تا 6 ژوئن 2008.
- هورن، BKP Robot Vision ; انتشارات MIT: کمبریج، MA، ایالات متحده آمریکا، 1987. [ Google Scholar ]
- Nayar, SK; ایکوچی، ک. Kanade, T. تعیین شکل و بازتاب سطوح هیبریدی با نمونه برداری فتومتریک. IEEE Trans. ربات. خودکار. 1990 ، 6 ، 418-431. [ Google Scholar ] [ CrossRef ]
- Phong، BT Illumination برای تصاویر تولید شده توسط کامپیوتر. اشتراک. ACM 1975 ، 18 ، 311-317. [ Google Scholar ] [ CrossRef ]
- فینلیسون، جی. هوردلی، اس. درو، ام. حذف سایه ها از تصاویر. در مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتر، کپنهاگ، دانمارک، 27 مه تا 2 ژوئن 2002.
- Finlayson، GD; درو، ام اس; Lu, C. تصاویر ذاتی با کمینه سازی آنتروپی. در مجموعه مقالات هشتمین کنفرانس اروپایی بینایی کامپیوتری، پراگ، جمهوری چک، 11-14 مه 2004.
- صحراگرد، مدل رنگی N. Daylight برای ماشین بینایی در فضای باز در بندرعباس، ایران. بین المللی J. Emerg. Trends Technol. محاسبه کنید. علمی 2013 ، 2 ، 249-254. [ Google Scholar ]
- Pomerleau, DA Neural Network Perception for Mobile Robot Guidance ; Kluwer Academic Publishers: Boston, MA, USA, 1993. [ Google Scholar ]
- روملهارت، دی. مک کللند، جی ال. کالیفرنیا، SD یک چارچوب کلی برای پردازش موازی توزیع شده. در پردازش توزیع شده موازی: کاوش در ریزساختار شناخت . مطبوعات MIT: کمبریج، ماس، ایالات متحده آمریکا، 1986; جلد 1، ص 45-76. [ Google Scholar ]
- تورپ، چشم انداز رنگی CE برای دنبال کردن جاده. در چشم انداز و ناوبری کارنگی ملون ناولاب ; Springer US: Boston, MA, USA, 1990; صص 175-185. [ Google Scholar ]
- برادلی، م. درختان تصمیم چند متغیره Utgoff، PE. ماخ یاد بگیرید 1995 ، 19 ، 45-77. [ Google Scholar ] [ CrossRef ]
- هوانگ، جی. کنگ، بی. لی، بی. ژنگ، FA روش جدید تشخیص جاده بدون ساختار بر اساس فضای رنگی hsv و ویژگی های جاده. در مجموعه مقالات کنفرانس بین المللی کسب اطلاعات، Seogwipo-si، کره، 8-11 ژوئیه 2007.
- آگاروال، سی سی; هینهبورگ، ای. کیم، DA در مورد رفتار شگفتانگیز معیارهای فاصله در فضای با ابعاد بالا. در مجموعه مقالات هشتمین کنفرانس بین المللی نظریه پایگاه داده، لندن، انگلستان، 4 تا 6 ژانویه 2001.
- Aherene، FJ; Thacker، NA; Rockett, PI متریک bhattacharyya به عنوان یک معیار شباهت مطلق برای داده های رمزگذاری شده فرکانس. Kybernetika 1997 ، 32 ، 1-7. [ Google Scholar ]
- سفید، CE; برنشتاین، دی. Kornhauser، AL برخی از الگوریتم های تطبیق نقشه برای دستیاران ناوبری شخصی. ترانسپ Res. 2000 ، 8 ، 91-108. [ Google Scholar ] [ CrossRef ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر