

خلاصه
چالشهای محاسباتی مهمی در حال ظهور هستند زیرا مدلسازی مبتنی بر عامل پیچیدهتر میشود و به صورت پویا مبتنی بر دادهها میشود. در این زمینه، شبیهسازی موازی یک راهحل جذاب در هنگام برخورد با دادههای عظیم و نیازمندیهای محاسباتی است. با این حال، تقریباً تمام سیستمهای شبیهسازی توزیعشده موجود، از مدلسازی پدیدههای مکانی، تزریق دادههای پویا و تجسم بلادرنگ پشتیبانی نمیکنند. برای مقابله با این مشکلات، ما یک سیستم شبیهسازی و تجزیه و تحلیل مبتنی بر دادههای دینامیکی توزیع شده (4D-SAS) را به طور خاص برای مدلسازی مبتنی بر عامل فضایی عظیم برای پشتیبانی از نمایش و تحلیل در زمان واقعی پدیدههای مکانی پیشنهاد میکنیم. برای انجام حل مسائل جغرافیایی در مقیاس بزرگ، سیستم 4D-SAS از نظر فضایی برای پشتیبانی از توسعه مدل جغرافیایی فعال شد و از محاسبات با کارایی بالا برای بهبود عملکرد شبیهسازی استفاده میکند. این می تواند به طور خودکار وظایف شبیه سازی را تجزیه کند و آنها را بین گره های محاسباتی به دنبال دو طرح رایج توزیع کند: تقسیم نظم یا تجزیه فضایی. علاوه بر این، کانال های جریان و پایگاه داده ذخیره سازی را برای ترکیب داده های پویا در مدل های شبیه سازی فراهم می کند. به روز رسانی زمینه عامل در زمان واقعی. یک ماژول تجسم آنلاین جدید بر اساس یک کتابخانه نقشهبرداری GIS، SharpMap، برای نمایش متحرک اجرای مدل توسعه داده شد تا به مشتریان کمک کند تا خروجیهای مدل را به طور موثر درک کنند. برای ارزیابی کارایی و مقیاسپذیری سیستم، دو مدل متفاوت مبتنی بر عامل فضایی، یک مدل انتخاب در مسیر، و یک مدل انتشار آتشسوزی جنگل، بر روی 4D-SAS ایجاد شد. نتایج شبیهسازی نشان میدهد که 4D-SAS یک پلت فرم کارآمد برای مدلسازی جغرافیایی مبتنی بر دادههای دینامیکی فراهم میکند، به عنوان مثال، هم شبیهسازی چند عاملی گسسته و هم اتوماتای سلولی مبتنی بر شبکه، که پشتیبانی کارآمدی را برای شبیهسازی موازی عظیم نشان میدهد. راندمان موازی دو مدل بالای 0.7 است و در آزمایشهای ما تقریباً ثابت میماند.
کلید واژه ها:
مدل مبتنی بر عامل ; محاسبات موازی ؛ شبیه سازی توزیع شده دینامیک داده محور ; تجسم آنلاین
چکیده گرافیکی
1. معرفی
مدلسازی مبتنی بر عامل (ABM) یک رویکرد مهم و کارآمد برای درک پدیدههای جغرافیایی پویا به شیوهای از پایین به بالا است [ 1 ، 2 ، 3 ، 4 ]. پژوهشگران را قادر می سازد تا الگوها و پیامدهای اضطراری در سطح سیستم را از تعاملات تعمیم یافته در سطح عامل فردی مطالعه کنند [ 4 ، 5 ، 6 ]. ABM ها به طور گسترده در بسیاری از زمینه ها از جمله اکولوژی، زیست شناسی، علوم اجتماعی، علوم اقتصادی، علوم کامپیوتر، و علوم زمین فضایی استفاده شده اند [ 7 ، 8 ، 9 ، 10 ، 11 ، 12 ، 13.].
مقیاس مشکلات تحقیق و پیچیدگی مدلها همچنان در حال افزایش است، در حالی که مدلسازی مبتنی بر عامل اغلب از نظر محاسباتی نیازمند است. بنابراین، توسعه دهندگان مدل، ناگزیر با یک سری مسائل محاسباتی، به عنوان مثال، زمان اجرای طولانی و مصرف بالای حافظه [ 2 ، 14 ، 15 ] مواجه می شوند. برای پرداختن به این مسائل محاسباتی در ABMهای مقیاس بزرگ، مجموعهای از الگوریتمها و سیستمهای موازی برای افزایش قابلیتهای مدل و بهبود عملکرد شبیهسازی ایجاد شدهاند [ 2 ، 13 ، 15 ، 16 ، 17.]. با این حال، بیشتر این راهحلها مشکلات تحقیقاتی خاص را هدف قرار میدهند و به چند سناریو نظری یا از پیش تعیینشده محدود میشوند. بنابراین، آنها نمی توانند پشتیبانی عمومی برای مدل سازی پویا پدیده های جغرافیایی فراهم کنند. برای برخی از سناریوهای عامل بسیار متحرک، به عنوان مثال، شبیه سازی ترافیک، این راه حل ها فاقد روش های تجزیه مدل مناسب هستند.
در همین حال، شبکههای حسگر به طور گسترده مستقر شدهاند و به طور مداوم دادههای رصدی غنی در زمان واقعی را برای ارائه توصیفی بیدرنگ از پدیدههای جغرافیایی ایجاد میکنند. متعاقبا، تعداد فزاینده ای از ABMها برای ترکیب این داده های پویا طراحی شده اند [ 18 ، 19]]. این دادههای پویا میتوانند برای بهبود دقت مدلسازی و افزایش قابلیتهای تحلیلی مورد استفاده قرار گیرند. با این حال، سیستمهای شبیهسازی موازی ABM در حال حاضر هیچ مکانیسم کارآمدی برای تطبیق با چنین انتقال مبتنی بر داده ندارند. علاوه بر این، تقریباً تمام این سیستمهای شبیهسازی بیشتر بر نمایش مدل و بهبود عملکرد تمرکز میکنند تا بر تعامل یا تجسم خود مدل. الزامات برای تجسم واقعی کارآمد شبیهسازیهای موازی ABM نیز مسائل حلنشده مهمی را مطرح میکند.
برای پرداختن به این چالشها، این مقاله یک سیستم شبیهسازی و تحلیل مبتنی بر دادههای دینامیکی توزیع شده (4D-SAS) را برای مدلسازی مبتنی بر عامل فضایی عظیم بر روی پلتفرمهای محاسباتی با کارایی بالا معرفی میکند. 4D-SAS پیشنهادی از قابلیت محاسبات توزیع شده بهره برداری می کند. معماری آن را می توان به ترتیب به سه سطح تقسیم کرد: پایگاه داده ذخیره سازی، موتور شبیه سازی توزیع شده، و ماژول های تجسم. در لایه پایین، یک پایگاه داده مکانی-زمانی یک مدل داده مکانی-زمانی ساده، اما کارآمد را در بر می گیرد و در MongoDB برای ترکیب داده های مکانی-زمانی پویا و ذخیره نتایج شبیه سازی میانی مستقر شده است. ردیف موتور شبیه سازی بر روی منبع باز Repast HPC [ 17] ساخته شد] و کلاس ها و کتابخانه های انتزاعی با قابلیت فضایی را برای پشتیبانی از توسعه سریع مدل های فضایی ارائه می دهد. موتور از دو نوع موازی متداول پشتیبانی می کند: “موازی عامل” و “موازی دامنه”. رویکرد موازی سازی عامل جدید توسعه یافته برای سناریوهای عامل بسیار متحرک بسیار مناسب است. لایه تجسم بر اساس یک کتابخانه نقشه برداری GIS “SharpMap” برای نمایش متحرک اجرای مدل پیاده سازی شد. 4D-SAS عملکرد تجسم را از پلتفرم شبیهسازی زیرین جدا میکند و تضمین میکند که تجسم شبیهسازی روی یک گره مستقل اجرا میشود تا بر فرآیند شبیهسازی تأثیری نداشته باشد.
دو ABM با فضای صریح مختلف برای ارزیابی کارایی و مناسب بودن 4D-SAS پیشنهادی توسعه داده شدند. یکی مدل انتخاب راننده در مسیر و دیگری مدل انتشار آتش سوزی در جنگل بود. مدل انتخاب راننده در مسیر، انتخاب مسیر رانندگان را با استفاده از اطلاعات سفر در زمان واقعی شبیهسازی میکند، به عنوان مثال، شرایط جاده و تراکم حملونقل [ 20 ، 21 ]. این مدل برای اعتبارسنجی استراتژی “موازی عامل” در 4D-SAS استفاده شد. دیگری مدل انتشار آتش سوزی در جنگل بود. این یک مدل مبتنی بر اتوماتای سلولی است که پویایی آتشسوزیهای جنگلی در حال گسترش در یک منظره کوهستانی را بیان میکند [ 22 ، 23 ، 24]]. از این مدل برای اعتبارسنجی روش «موازی دامنه» استفاده شد. در طول شبیه سازی، این دو مدل هر دو با داده های دینامیکی، به عنوان مثال، ترافیک یا سرعت باد تغذیه شدند تا وضعیت محیط شبیه سازی را در زمان واقعی به روز کنند. نتایج تجربی از این دو شبیهسازی نشان میدهد که 4D-SAS یک پلتفرم کارآمد و مناسب برای مدلسازی جغرافیایی مبتنی بر دادههای دینامیکی است، به عنوان مثال، هم شبیهسازی چند عاملی گسسته و هم اتوماتای سلولی مبتنی بر شبکه.
2. پیشینه و کارهای مرتبط
2.1. شبیه سازی موازی ABM
مدل سازی مبتنی بر عامل به یک راه حل جذاب برای دانشمندان پژوهشی در بسیاری از زمینه های مختلف تبدیل شده است. با این حال، دستیابی به پتانسیل کامل ABM در ابتکارات تحقیقاتی در مقیاس بزرگ، تقاضاهای بسیار بیشتری را برای منابع محاسباتی موجود (مثلاً توان پردازش، حافظه و ظرفیت ورودی/خروجی) ایجاد خواهد کرد. در شبیهسازیهای ABM در مقیاس بزرگ، عوامل زیادی مورد نیاز است و هر عامل باید در قالب قوانین و پارامترها پیچیدهتر باشد تا به خروجی واقعیتری برسد. برای مقابله با این محدودیتهای منابع در ABMهای مقیاس بزرگ، دو راهحل رایج در ادبیات ظاهر میشوند: (1) تجمع عامل. (2) موازی سازی مدل.
در تجمیع عامل، گروهی از افراد همگن به یک ابرعامل تعمیم مییابند، به عنوان مثال، نمایندگان نماینده در شبیهسازی اقتصادی [ 25 ]. این رویکرد می تواند نیازهای محاسباتی را با مدل سازی با تعداد کمتری از عوامل کاهش دهد. مزیت تجمیع عامل این است که قطعات مشابهی از الگوها را ترکیب می کند تا نمایش فشرده تری ایجاد کند. از آنجایی که برخی از مدلها ذاتاً در مقیاس زمانی یا مکانی ناهمگن هستند، رویکردهای تجمیع عامل دقت مدل را کاهش میدهد و در گرفتن الگوهای پیچیدهتر شکست میخورد [ 26 ، 27 ].
راه حل دیگر برای ABM های مقیاس بزرگ، از قدرت محاسبات با کارایی بالا (HPC) برای افزایش قابلیت های شبیه سازی استفاده می کند. ABM موازی مدل متوالی اصلی را به چندین مشکل فرعی تجزیه میکند که میتوانند به واحدهای محاسباتی مختلف توزیع شده و به طور همزمان حل شوند. این رویکرد محققین را ملزم به طراحی الگوریتمها و پیادهسازیهای جدید ABM میکند که برای پلتفرمهای موازی زیرین طراحی شدهاند [ 2 ، 3]]. تکنیکهای موازی ABM برای مشکلات تحقیقاتی مختلف، از جمله تعامل فضایی، پویایی پوشش گیاهی، رشد شهری، و انتشار بیماری به کار گرفته شدهاند. تعدادی از سیستمهای شبیهسازی ABM برای پشتیبانی از مدلسازی موازی، از جمله FLAME، DMASON، Repast HPC و HPABM توسعه یافتهاند. بیشتر این راهحلها مشکلات تحقیقاتی خاص را هدف قرار میدهند و فاقد پشتیبانی عمومی برای مدلسازی پدیدههای جغرافیایی پویا هستند. ABM های صریح فضایی شامل مکان های فیزیکی ویژگی ها یا پدیده های مدل شده است. GIS یک ابزار ضروری برای نمایش این اشیاء مکانی در این نوع ABM است. با این حال، هیچ توابع یا بسته های GIS در پلت فرم های شبیه سازی موازی موجود در حال حاضر یکپارچه نشده اند.
علاوه بر این، تجزیه مدل برای کارایی موازی حیاتی است. دو طرح متداول تجزیه مدل وجود دارد: داده ها و موازی سازی وظایف. FLAME، Repast HPC و DMASON از طرح موازی سازی داده ها پیروی می کنند و HPAMB از طرح موازی کار استفاده می کند. در مقایسه با موازی سازی کار، طرح موازی سازی داده ها کلیت بسیار بیشتری را نشان می دهد. DMASON و Repast HPC ذاتاً یک روش تجزیه فضایی ارائه می دهند و از این واقعیت سوء استفاده می کنند که عوامل معمولاً در یک منطقه خاص ساکن هستند و تعاملات محلی بین آنها وجود دارد. از طرف دیگر، FLAME تنها از تقسیم عوامل به ترتیب عامل پشتیبانی می کند. با این وجود، تجزیه فضایی برای سناریوهای شبیه سازی عوامل ثابت بسیار مناسب است، اما برای عوامل بسیار متحرک به خوبی کار نمی کند. بدین ترتیب،
2.2. مدل سازی مبتنی بر عامل داده محور
در پارادایمهای شبیهسازی سنتی، مدلهای مبتنی بر عامل معمولاً از دادههای استاتیک به عنوان ورودی برای پیشبینی وضعیتهای سیستم در آینده استفاده میکنند. در مدلسازی فرآیندهای مکانی پویا، از آنجایی که دادههای ورودی استاتیک نمیتوانند تغییرات محیط بلادرنگ را بهموقع ثبت کنند، نتایج شبیهسازی اغلب از دادههای اندازهگیری شده منحرف میشود و منجر به شکست پیشبینی میشود. از آنجایی که دادههای پویا بلادرنگ میتوانند وضعیت بهروز محیط را نشان دهند، یک الگوی شبیهسازی جدید در حال ظهور است. این مستلزم توانایی ترکیب دینامیکی دادههای بلادرنگ اضافی هنگام اجرای شبیهسازی است و نوید تجزیه و تحلیل و پیشبینی بسیار دقیقتر را میدهد [ 28]]. این الگوی جدید شبیهسازی مبتنی بر دادههای دینامیک در سالهای اخیر در حوزههای تحقیقاتی مختلفی از جمله مدیریت بحران، علوم محیطی، پیشبینی بلایا، بیوتکنولوژی، امور مالی و تجارت اعمال شده است [ 29 ، 30 ، 31 ، 32 ، 33 ، 34 ، 35 ، 36 ].
یکی از نمونههای شاخص در این الگوی شبیهسازی مبتنی بر دادههای پویا، شبیهسازی ترافیک میکروسکوپی است، به عنوان مثال، تصمیمگیری در مسیر سفر. در شبیه سازی ترافیک، رویدادهای ترافیکی در بخش های جاده اتفاق می افتد. ترافیک باعث کاهش سرعت و ازدحام ترافیک می شود. بنابراین، شرایط جاده، به عنوان یک ویژگی مهم بافت عامل سیار، به عنوان یک عامل بسیار تأثیرگذار در رفتار راننده در مورد سفر و انتخاب مسیر رفتار می کند. بنابراین، ارائه اطلاعات جاده در زمان واقعی می تواند به بهبود عملکرد ترافیک و کیفیت خدمات کمک کند [ 37 ، 38 ، 39 ].
همانطور که شبکه های حسگر بیشتر و بیشتری در اطراف ما مستقر می شوند، می توان به راحتی به داده های مشاهده ای در زمان واقعی که با مختصات و زمان برچسب گذاری شده اند دسترسی داشت. این داده های پویا توضیحات قابل اعتماد و به روزی را در مورد محیط ما ارائه می دهند. این داده ها را می توان با شبیه سازی، تأیید و اعتبار سنجی در مدل سازی ABM ادغام کرد. با این حال، سیستمهای شبیهسازی مبتنی بر عامل موازی فعلی هیچ مکانیزمی برای یکپارچهسازی دادههای پویا ارائه نمیدهند و این میتواند ما را از درک واقعیتر از ماهیت پیچیده این پدیدهها محروم کند. برای یکپارچهسازی دادههای پویا، یک سیستم شبیهسازی ABM باید قابلیتهایی را برای دسترسی کارآمد به دادهها و جذب دادههای پویا فراهم کند.
2.3. تجسم دینامیک شبیه سازی ABM
تقریباً تمام سیستمهای شبیهسازی موازی توسعهیافته، قابلیتهای غنی را برای ساخت مدل و اجرای توزیعشده فراهم میکنند. اهداف اصلی تحقیق به سمت بهبود عملکرد هدایت شده است، اما به ندرت تعامل یا تجسم خود مدل در نظر گرفته شده است. پلتفرمهای شبیهسازی ABM همچنین باید قابلیت تجسم مستقیم را برای تجسم واضح تعامل بین عوامل و همچنین تجسم توسعه سیستم از طریق کل شبیهسازی فراهم کنند [ 40 ]. از طریق تجسم کارآمد ABM، پلت فرم شبیه سازی می تواند به طور موثر رفتار مدل را منتقل کند و به کاربر کمک می کند تا خروجی های مدل را به سرعت درک کند [ 41 ، 42 ].
تجسم ABM با GIS، به عنوان مثال، فناوری محیط جغرافیایی مجازی (VGE) [ 42 ] پیاده سازی شده است . عوامل منفرد و محیط های اطراف در یک ABM معین می توانند به عنوان ویژگی های جغرافیایی (نقاط، چند خط و چند ضلعی) نمایش داده شوند و در یک فضای جغرافیایی مجازی نمایش داده شوند. برای مثال، در شبیهسازیهای حملونقل، نمایش مجازی معمولاً شامل محیط جغرافیایی مربوطه (جادهها بهعنوان چند خط، ساختمانها بهعنوان چندضلعی، و غیره ) و عوامل فعال (ماشینها و عابران پیاده به عنوان نقاط گسسته) است [ 5 ].
مقایسه دقیق بین سیستم های شبیه سازی ABM موازی ذکر شده در بخش 2.1 نشان داد که اکثر سیستم های ABM موازی از تجسم آنلاین همراه با اجرای مدل پشتیبانی نمی کنند. برخی از سیستم ها، مانند DMASON و FLAME، تنها پس از اتمام اجرای مدل، از پخش مجدد نتایج شبیه سازی پشتیبانی می کنند. سیستم های دیگر حتی هیچ عملکرد بصری ندارند. بنابراین، توسعه یک ماژول تجسم آنلاین برای پلتفرم های ABM توزیع شده برای نمایش توسعه مدل همراه با اجرای مدل ضروری است.
3. معماری کلی سیستم 4D-SAS پیشنهادی
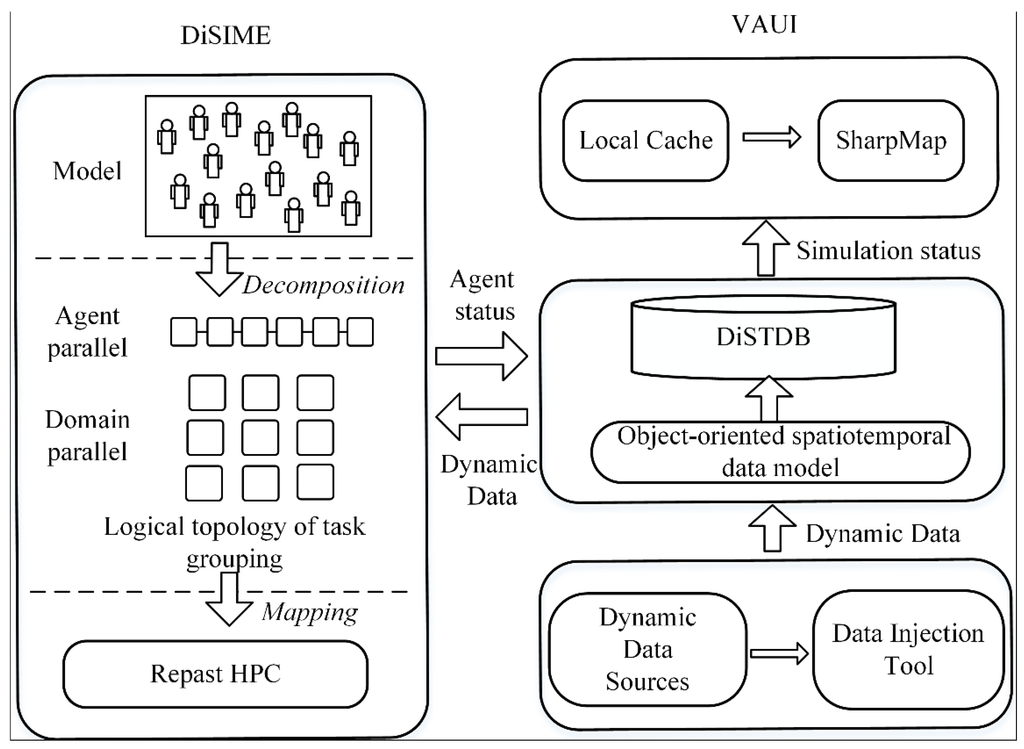
برای فعال کردن حل مسائل جغرافیایی در مقیاس بزرگ، 4D-SAS از محاسبات با عملکرد بالا برای بهبود عملکرد شبیهسازی استفاده میکند که در شکل 1 نشان داده شده است . سیستم پیشنهادی از سه جزء اصلی تشکیل شده است: پایگاه داده مکانی-زمانی توزیع شده (DiSTDB)، موتور شبیه سازی ABM توزیع شده (DiSIME)، و تجسم و تحلیل آنلاین UI (VAUI).
همانطور که در شکل 1 نشان داده شده استپایگاه داده فضایی-زمانی توزیع شده (DiSTDB) به عنوان یک مرکز ذخیره سازی برای داده های ورودی پویا و مرکز تبادل برای نتایج شبیه سازی میانی مستقر شده است. این DiSTDB بر روی یک MongoDB توزیع شده ساخته شده است و از پرس و جو و به روز رسانی سریع پشتیبانی می کند. داده های دینامیکی (به عنوان مثال، وضعیت جاده، جهت باد) جمع آوری شده و توسط یک ابزار تزریق داده اضافی (DIT) به DiSTDB وارد می شود. این دادههای پویا توسط موتور شبیهسازی در مدلهای شبیهسازی بارگذاری میشوند. وضعیت زمینه عامل را همراه با اجرای مدل به روز می کند. نتایج شبیهسازی میانی به طور مداوم در طول شبیهسازی تولید میشوند، به عنوان مثال، موقعیتهای عامل سیار، توسعه بلوکهای شهری. این نتایج شبیهسازی میانی را میتوان بهطور موقت در DiSTDB ذخیره کرد و بعداً برای بهروزرسانی صحنه در VAUI استفاده کرد.
موتور شبیهسازی ABM توزیع شده (DiSIME) بر روی پروژه منبع باز Repast HPC (Repast برای محاسبات با عملکرد بالا) ساخته شده است، که میتواند با DiSTDB زیربنایی ارتباط برقرار کند و از توسعه سریع مدلهای شبیهسازی مکانی پشتیبانی کند. ما دو تلاش اصلی سفارشیسازی را روی Repast HPC انجام دادیم. در مرحله اول، Repast HPC برای توسعه ABMهای صریح فضایی گسترش یافت. چندین کلاس با قابلیت فضایی از کلاس های اصلی در بسته Repast HPC به ارث برده شده اند. به عنوان مثال، کلاس Agent در Repast HPC اکنون می تواند هندسه خود را که از OpenGIS Simple Features برای استاندارد SQL پیروی می کند، شامل شود. کتابخانههای GDAL و GEOS برای وارد کردن/صادرات دادههای مکانی به/از عوامل دارای قابلیت فضایی استفاده میشوند. ثانیاً، DiSIME می تواند انواع مختلفی از موازی سازی را پشتیبانی کند.
VAUI از قدرت عملکردهای تجسم سنتی GIS برای پشتیبانی از نمایش آنلاین شبیهسازی مکانی پویا استفاده میکند. این می تواند بر روی یک ماشین مستقل به عنوان یک برنامه اجرایی مستقل اجرا شود. از طریق واسط های پرس و جو با DiSTDB راه دور ارتباط برقرار می کند. این حالت می تواند تجسم مدل را از موتور شبیه سازی توزیع شده جدا کند. در همان زمان، VAUI یک رابط برای مشتریان برای انجام تجزیه و تحلیل بصری داده های سری زمانی ارجاع داده شده جغرافیایی فراهم می کند.
4. موتور شبیه سازی ABM توزیع شده (DiSIME)
ویژگیهای متمایز DiSIME که با Repast HPC اصلی متفاوت است، کلاسهای فضایی فعال (شرح شده در بخش 4.1 ) و رویکرد جدید تجزیه “موازی عامل” (شرح شده در بخش 4.2 ) است.
4.1. اجزای قابل استفاده مجدد برای مدل سازی پدیده های GIS
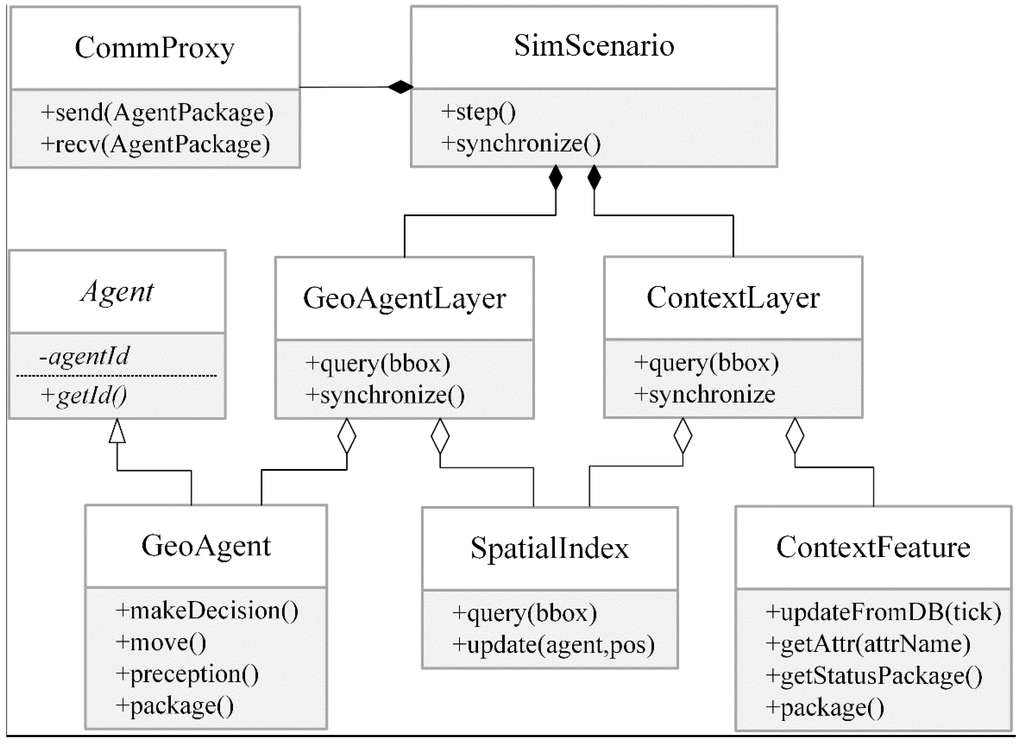
به منظور حمایت از توسعه سریع مدلهای شبیهسازی مکانی، چندین کلاس انتزاعی طراحی و در بسته اصلی Repast HPC ادغام شدند. همه این کلاسهای انتزاعی دارای ویژگیهای مکانی هستند و توانایی ثبت پدیدههای فضایی را فراهم میکنند. این کلاس ها از قدرت انواع قالب C++ استفاده می کنند و برای استفاده مجدد آسان هستند. رابطه کلی بین این کلاس های فضایی فعال در شکل 2 نشان داده شده است .
کلاس های انتزاعی، SimScenario، GeoAgentLayer، GeoAgent، ContextLayer و ContextFeature هسته یک مدل مبتنی بر عامل فضایی را تشکیل می دهند. کلاس SimScenario در سطح بالایی قرار دارد و تمام اجزایی که سناریوی شبیه سازی را تعریف می کنند را مدیریت می کند. این کلاس به عنوان یک شی سینگلتون پیاده سازی شد. این شامل مجموعه ای از اشیاء GeoAgentLayer، مجموعه ای از اشیاء ContextLayer و یک شی CommProxy است.
کلاس GeoAgent کلاس Agent عمومی را در Repast HPC گسترش میدهد تا همه موجودیتهای فضایی پویا را در مدل نشان دهد که حالتهای داخلی دارند و تصمیمگیری مستقل میکنند. در اینجا، کلاس GeoAgent هنوز یک کلاس عمومی حاوی توابع انتزاعی است که باید نمونه سازی شوند. بنابراین، در یک مدل مبتنی بر عامل واقعی، توسعهدهنده باید یک کلاس عامل خاص دامنه جدید را تعریف کند، که از کلاس GeoAgent عمومی به ارث رسیده و پیادهسازیهای مشخصی را برای آن توابع انتزاعی فراهم میکند.
کلاس GeoAgentLayer به عنوان یک محفظه برای مجموعه ای از عوامل فضایی عمل می کند و رابطه بین GeoAgents را تعریف می کند. علاوه بر این، همچنین نمایش کلی گروهی از عوامل فضایی را تعریف میکند، به عنوان مثال، در یک شبکه یا در یک تیم مجزا، و یک توپولوژی عامل و شاخص فضایی در این ظرف ایجاد میکند.
کلاس ContextFeature ویژگی های فضایی را در زمینه پس زمینه برای عامل ها نشان می دهد. این ویژگی های فضایی در زمینه می تواند ایستا یا پویا و در قالب شطرنجی یا برداری باشد. کلاس ContextLayer عملکردی مشابه کلاس GeoAgentLayer دارد و به عنوان یک محفظه برای اشیاء ContextFeature عمل می کند.
کلاس SpatialIndex شاخص های فضایی رایج را به عنوان R-Tree، شاخص مبتنی بر شبکه و KD Tree برای سرعت بخشیدن به پرس و جوهای فضایی پیاده سازی می کند. پلتفرم اصلی Repast HPC فقط از پرس و جوی عامل با شناسه یا موقعیت دقیق پشتیبانی می کند. این کلاس SpatialIndex مکمل انواع پرس و جو عامل در Repast HPC است. کلاس CommProxy (مخفف “Communication Proxy”) مسئول تعامل عامل و همگام سازی حالت بین گره های شبیه سازی توزیع شده است. به عنوان مثال، می تواند به تبادل وضعیت برخی از عواملی که در دو گره مجاور قرار دارند کمک کند تا آنها را سازگار کند.
4.2. تجزیه “موازی عامل” در DiSIME
مدلسازی عامل موازی در DiSIME که از Repast HPC توسعه یافته است، اکنون میتواند از دو نوع موازی استفاده کند: “موازی عامل” و “موازی دامنه”، که در شکل 3 نشان داده شده است . Repast HPC یک تجزیه فضایی ذاتی برای شبیهسازی ABM توزیع شده، به عنوان مثال ، “دامنه موازی” فراهم میکند. رویکرد “موازی دامنه” فضای جغرافیایی را به زیربخشهای مجزا تقسیم میکند و هر زیربخش شامل بخشی از تمام عوامل ساکن در این منطقه است. بنابراین، تقسیمات فرعی در تجزیه دامنه را می توان مستقیماً به فرآیندهای MPI نگاشت.
با این حال، توازی دامنه که در شکل 3 ب دیده می شود، در شبیه سازی ترافیک بسیار متحرک مناسب نیست. اتومبیل ها در شبکه جاده ای پیچیده رفت و آمد می کنند. اگر روش تجزیه “دامنه موازی” برای این مورد اتخاذ شود، عوامل خودرو به طور مکرر از یک بخش فرعی به بخش فرعی دیگر حرکت می کنند، این مخلوط ها باعث ارتباط زیاد بین فرآیندها و در نتیجه عدم تعادل بار شدید می شود. با توجه به این مشکل، Repast HPC در DiSIME گسترش یافته است تا از روش تجزیه دیگری، “موازی عامل”، که در شکل 3 دیده می شود، پشتیبانی کند.آ. در این توازی، همه عامل ها تنها با در نظر گرفتن دستورات عامل و بدون اشاره به ساختار فضایی عامل ها و زمینه آنها تجزیه می شوند. به عنوان مثال، در مجموع 1000 خودروی متحرک در یک مدل ترافیکی ممکن است به ده گروه تقسیم شوند: 0~99، 100~199، … و 900~999. این نوع موازی سازی برای مواردی مناسب است که در آن جابجایی کمی بین عامل ها وجود دارد اما ارتباط بیشتری بین عامل ها و زمینه آنها وجود دارد.
در Repast HPC، کلاس Projection برای تعریف زمینه عامل و تحمیل یک رابطه معنایی بر عامل ها استفاده می شود. این سه طرح ارائه می دهد: یک شبکه، یک شبکه و یک فضای پیوسته. همه آنها در طول شبیه سازی تقسیم شده و بر روی فرآیندهای MPI توزیع می شوند. با این حال، هیچ یک از این سه پیش بینی برای مورد “موازی عامل” مناسب نیستند. به منظور پیاده سازی تجزیه “عامل موازی”، کلاس ContextLayer مستقیماً از کلاس Projection عمومی گسترش می یابد. در این طرح جدید، تمام دادههای زمینه در بین فرآیندهای شبیهسازی تکرار میشوند. فرآیند اصلی مسئول به روز رسانی تمام کپی های زمینه است و آنها را در طول کل اجرای مدل سازگار می کند.
در تجزیه “موازی عامل”، ارتباط بین فرآیندها عمدتاً از آمار کلی عوامل فضایی، به عنوان مثال، تعداد کل عوامل در یک منطقه مشخص تشکیل شده است. به منظور پشتیبانی از این نوع عملیات GIS، کلاس CommProxy کلاس RepastProcess را برای پشتیبانی از پرس و جوهای فضایی در سراسر فرآیندها گسترش می دهد. پیام درخواست عامل فقط شامل یک محدوده مکانی برای درخواست از GeoAgent هایی است که در این منطقه قرار می گیرند بدون ارائه شناسه های دقیق عامل. در طول ارتباط پیام، دادههای هندسی GeoAgent ابتدا با کمک کتابخانه GDAL در یک رشته WKB (دودویی معروف) کدگذاری میشوند و سپس همراه با ویژگیهای موضوعی توسط MPI به فرآیند مقصد منتقل میشوند. در فرآیند مقصد، رشته WKB سپس توسط CommProxy به یک کلاس Geometry رمزگشایی می شود تا پرس و جوهای فضایی را انجام دهد.
5. مدیریت و تزریق داده های مکانی پویا
برای پیاده سازی توابع مورد نیاز DiSTDB، یک مدل داده مکانی-زمانی طراحی شد تا به طور موثر تمام اطلاعات پویا را برای شبیه سازی و تجسم ABM نشان دهد. این مدل داده در بخش 5.1 توضیح داده شده است . ابزار تزریق داده اضافی (DIT) در بخش 5.2 معرفی شده است تا نحوه جمع آوری و جذب داده های پویا در DiSTDB را نشان دهد.
5.1. مدل داده های مکانی-زمانی شی گرا
بسیاری از مدلهای دادههای GIS برای ترکیب اطلاعات زمانی در پایگاههای اطلاعاتی مکانی پیشنهاد شدهاند، از جمله عکسهای فوری متوالی [ 43 ]، حالت پایه با اصلاحات [ 44 ]، مدل ترکیبی فضا-زمان [ 45 ]، مدل مکانی-زمانی شیگرا [ 46 ]، رویداد مدل دادههای مکانی-زمانی مبتنی بر [ 47 ] و غیره. چندین مطالعه بررسی دقیقی در مورد آن مدلهای دادههای مکانی-زمانی انجام دادهاند [ 43 ، 48 ]. به منظور ترکیب و ذخیره موثر دادههای پویا از منابع مختلف، مدل داده در DiSTDB از مدل دادههای فوری ساده و مدل فضایی-زمانی مبتنی بر شی گسترش یافته است.
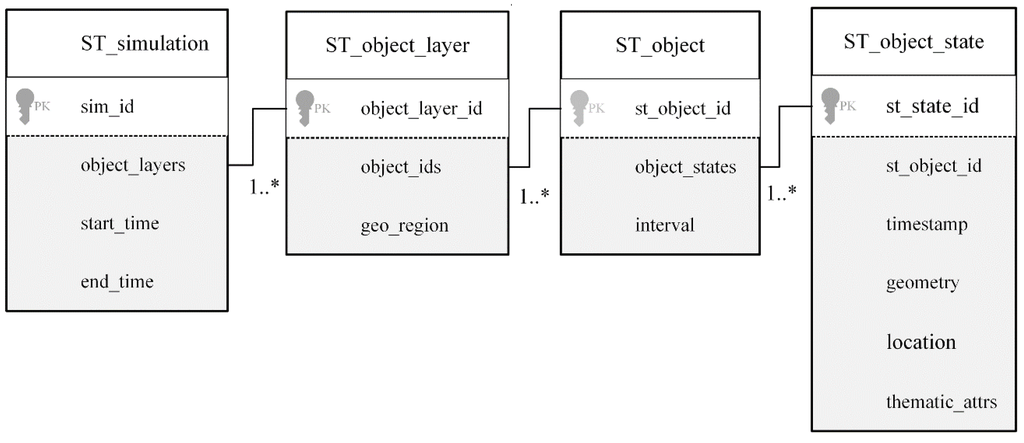
شکل 4 نمودار موجودیت-رابطه (ER) مدل داده های مکانی-زمانی پیشنهادی را نشان می دهد. این مدل داده از چندین بلوک ساختمانی اولیه به ترتیب ST_simulation، ST_object_layer، ST_object و ST_object_state تشکیل شده است. یک ST_simulation یک فرآیند شبیه سازی را در DiSIME نشان می دهد و شامل مجموعه ای از کلاس های شی فضایی است که ST_object_layer نامیده می شود. هر ST_object_layer مجموعه ای از اشیاء مکانی همگن زمانی است ( به عنوان مثال ST_object) و هر شی دارای تعدادی حالت زمانی است ( یعنی، ST_object_state)، که توسط یک برچسب زمانی مرتبط هستند. در هر حالت زمانی، هر شی دارای یک هندسه و تعدادی ویژگی موضوعی است. وضعیت جسم فضایی ممکن است تغییر در هندسه، ویژگی ها یا هر دو باشد. این مدل عکس فوری سفارشیشده ممکن است باعث ایجاد درجهای از تکراری شدن دادهها با ویژگیهای بدون تغییر در مکان یا زمان شود، اما این مبادله زمانی که با بهروزرسانیهای وضعیت همزمان از منابع مختلف مواجه میشوید بسیار کارآمد میشود. موجودیت ها در این مدل داده های مکانی-زمانی رابطه مستقیمی با کلاس های انتزاعی در DiSIME دارند. به عنوان مثال، GeoAgentLayer و ContextLayer از DiSIME را می توان در جدول ST_object_layer در DiSTDB سریال کرد، در حالی که GeoAgent و ContextFeature هر دو در جدول ST_object ذخیره می شوند.
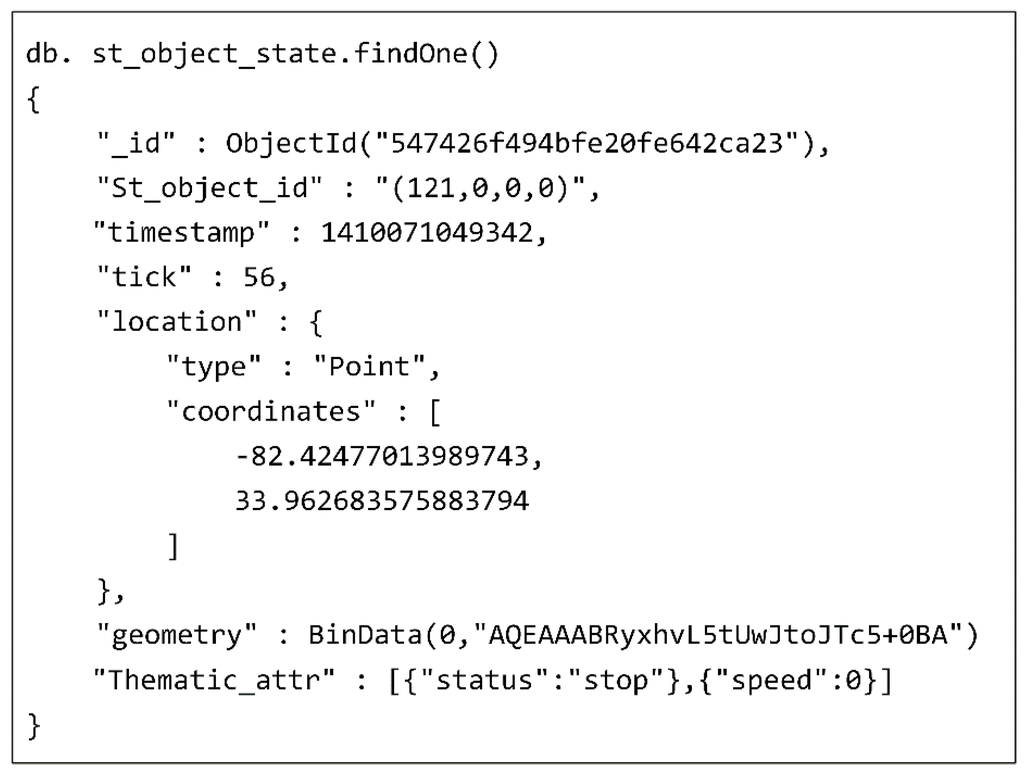
MongoDB برای پیاده سازی این مدل داده مکانی-زمانی فوق الذکر انتخاب شده است. در اینجا یک رکورد حالت از جدول ST_object_state انتخاب شده است تا نشان دهد که چگونه داده های مکانی-زمانی پویا در قالب MongoDB JSON ذخیره می شوند، یک مثال رکورد در شکل 5 نشان داده شده است .
5.2. خطوط لوله تزریق داده همزمان برای DiSTDB
در طول شبیهسازی مبتنی بر دادههای دینامیکی، هم عوامل و هم زمینه در ABM، یعنی جداول ST_object_state در DiSTDB، اغلب در طول شبیهسازی بهروزرسانی میشوند. دو فرآیند به روز رسانی بین آنها متفاوت است. وضعیت ویژگیهای فضایی ساکن در زمینه پسزمینه از دادههای مشاهده توسط ابزار تزریق داده (DIT) بهروزرسانی میشود، در حالی که وضعیت اشیاء عامل مختلف توسط نتایج شبیهسازی موقت مستقیماً از DiSIME بهروزرسانی میشود.
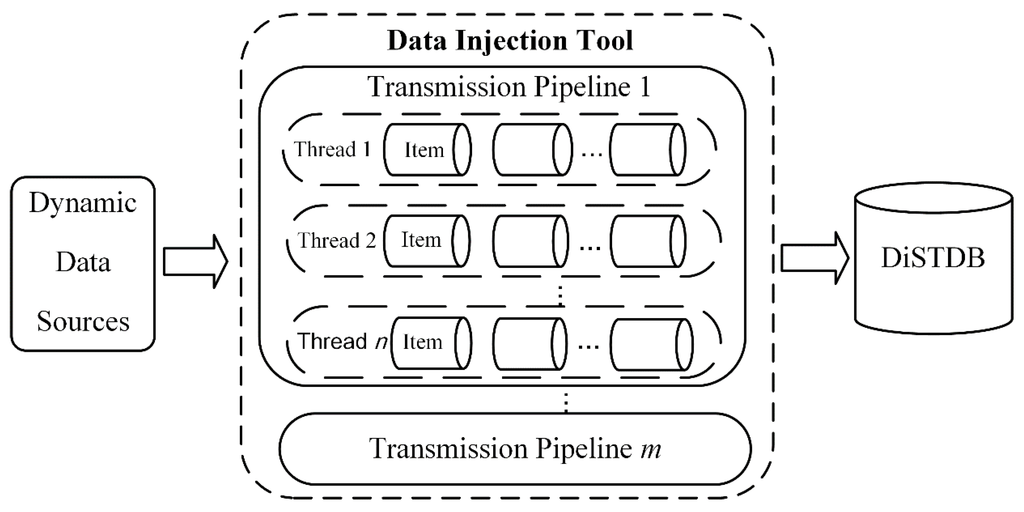
ابزار تزریق داده به صورت داخلی تعدادی خط لوله جریان داده را تولید می کند که در شکل 6 نشان داده شده است . یک طرف خط لوله جریان، رابط ارائه داده های حسگر است، به عنوان مثال، OGC SOS (سرویس مشاهده حسگر)، و طرف دیگر جدول از پیش تعریف شده در DiSTDB است. خط لوله به صورت دوره ای داده های مشاهده را از رابط ارائه می خواند، داده های ورودی را با فیلترهای انتخاب شده پردازش می کند و یک رکورد وضعیت شی جدید را به شی فضایی خاص در DiSTDB هدف اضافه می کند.
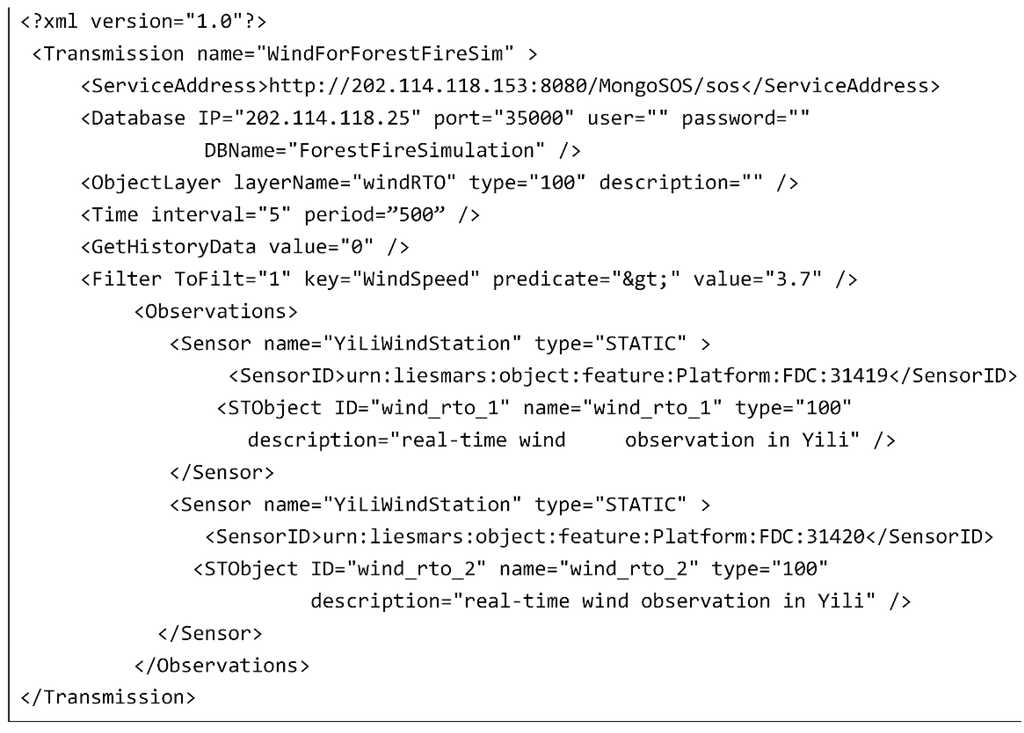
هر خط لوله جریان معمولاً دارای n رشته کار همزمان است و این رشته های کاری وظایف انتقال را انجام می دهند. در خط لوله جریان DIT، هر داده مشاهده ای در یک آیتم انتقال که به عنوان بار انتقال عمل می کند، کپسوله می شود. مورد انتقال با یک فایل XML فرمت شده است و منبع، مقصد و عملیات فیلتر پیوست شده را تعریف می کند. یک نمونه مورد انتقال XML برای داده های سرعت باد به صورت زیر در شکل 7 نشان داده شده است .
6. تجسم دینامیک شبیه سازی ABM
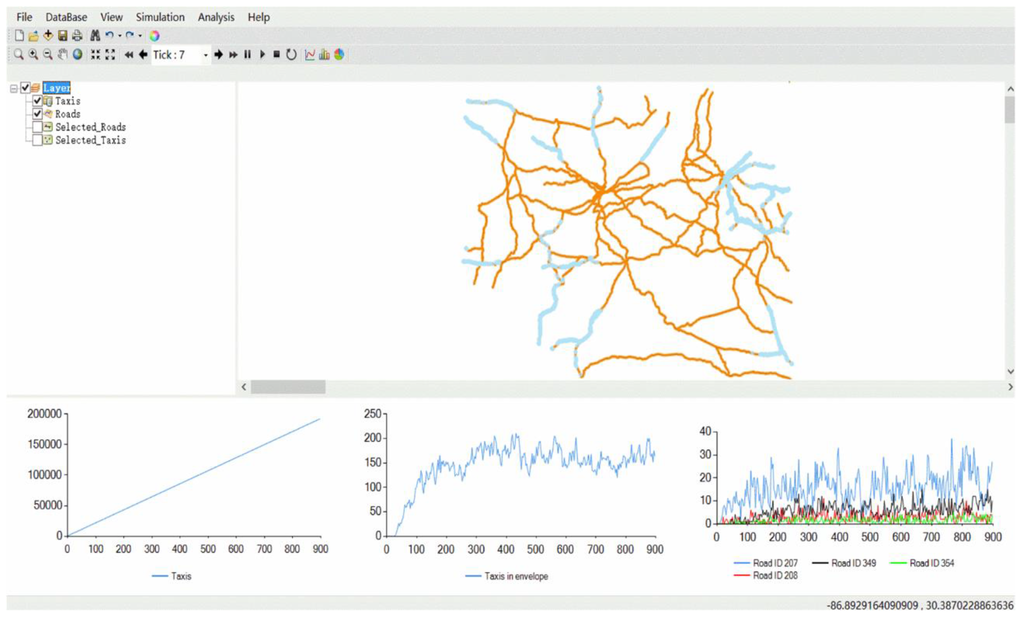
VAUI در 4D-SAS مسئول تجسم پویا و تجزیه و تحلیل آنلاین است. VAUI از SharpMap منبع باز به عنوان محیط تجسم استفاده می کند و از قابلیت های آن برای ارائه یک نمایش واقعی بهره می برد. SharpMap که به زبان سی شارپ نوشته شده است، یک کتابخانه نقشه برداری GIS با کاربری آسان برای استفاده در برنامه های وب یا دسکتاپ است. SharpMap در اصل برای تجسم نقشه استاتیک توسعه داده شد، و بنابراین باید با نیازهای مدلسازی شبیهسازی پویا تطبیق داده شود. VAUI عملکردهای سنتی GIS SharpMap را با سه ویژگی جدید گسترش می دهد: (1) ارتباط مستقیم با DiSTDB زیربنایی. (2) نمایش تعاملی فرآیند شبیه سازی پویا در انیمیشن. و (3) تجزیه و تحلیل آنلاین داده های سری زمانی مرجع جغرافیایی.
تجسم شبیه سازی به زمان آگاه است و با انیمیشن های کنترل شده توسط کاربر ارائه می شود. VAUI به صورت دورهای نتایج شبیهسازی پویا را از DiSTDB استخراج میکند و بهصورت پویا صحنه شبیهسازی را در یک فرکانس مشخص، که در شکل 8 نشان داده شده است، بهروزرسانی میکند . علاوه بر توابع اصلی نمای GIS، به عنوان مثال، بزرگنمایی/کوچک کردن و حرکت، همچنین قابلیت ایجاد عکس های فوری از نمایشگر و فیلم های توسعه مدل را در طول زمان فراهم می کند. این به کاربران اجازه می دهد تا یک شبیه سازی در حال اجرا را کنترل کنند ( به عنوان مثال.، شروع/توقف شبیه سازی، تنظیم پارامترها، ذخیره/بارگذاری حالت های شبیه سازی) از طریق کنترل پنل. علاوه بر این، VAUI به کاربران اجازه می دهد تا از طریق ابزارهای پرس و جو، ویژگی های دقیق موجودیت های شبیه سازی (مانند سرعت فعلی خودرو) را جستجو کنند. همچنین شامل ابزارهای مناسب برای محاسبه بلادرنگ مقادیر آماری در بعد زمانی است، به عنوان مثال، مقادیر میانه در یک دوره زمانی انتخاب شده.
7. مطالعه موردی و تجربی
7.1. طراحی و پیکربندی تجربی
دو مورد شبیه سازی برای ارزیابی کارایی و مناسب بودن 4D-SAS پیشنهادی توسعه داده شد. مورد اول شامل هزاران عامل تلفن همراه است و توسعه یک مدل “موازی عامل” را نشان می دهد، در حالی که مورد دوم از یک ABM مبتنی بر اتومات سلولی برای ارزیابی توسعه مدل “دامنه موازی” استفاده می کند. در طول دو آزمایش، از دو معیار، سرعت و کارایی موازی، برای ارزیابی عملکرد این دو مدل موازی استفاده شد.
همه آزمایش ها بر روی یک خوشه از کامپیوترهای با کارایی بالا انجام شد. خوشه شامل 13 ماشین بود که به صورت زیر پیکربندی شده بودند: یک ماشین به عنوان مدیر خوشه استفاده شد. یک دستگاه به عنوان تجسم VAUI استفاده شد. شش سرور به عنوان واحدهای محاسباتی DiSIME و پنج سرور برای DiSTDB زیربنایی استفاده شد. همه سرورها مستقیماً توسط یک اترنت اختصاصی 1 گیگابیت بر ثانیه به هم متصل شدند. پیکربندی دقیق خوشه در جدول 1 فهرست شده است .
7.2. مطالعه موردی شبیه سازی مدل “موازی عامل”.
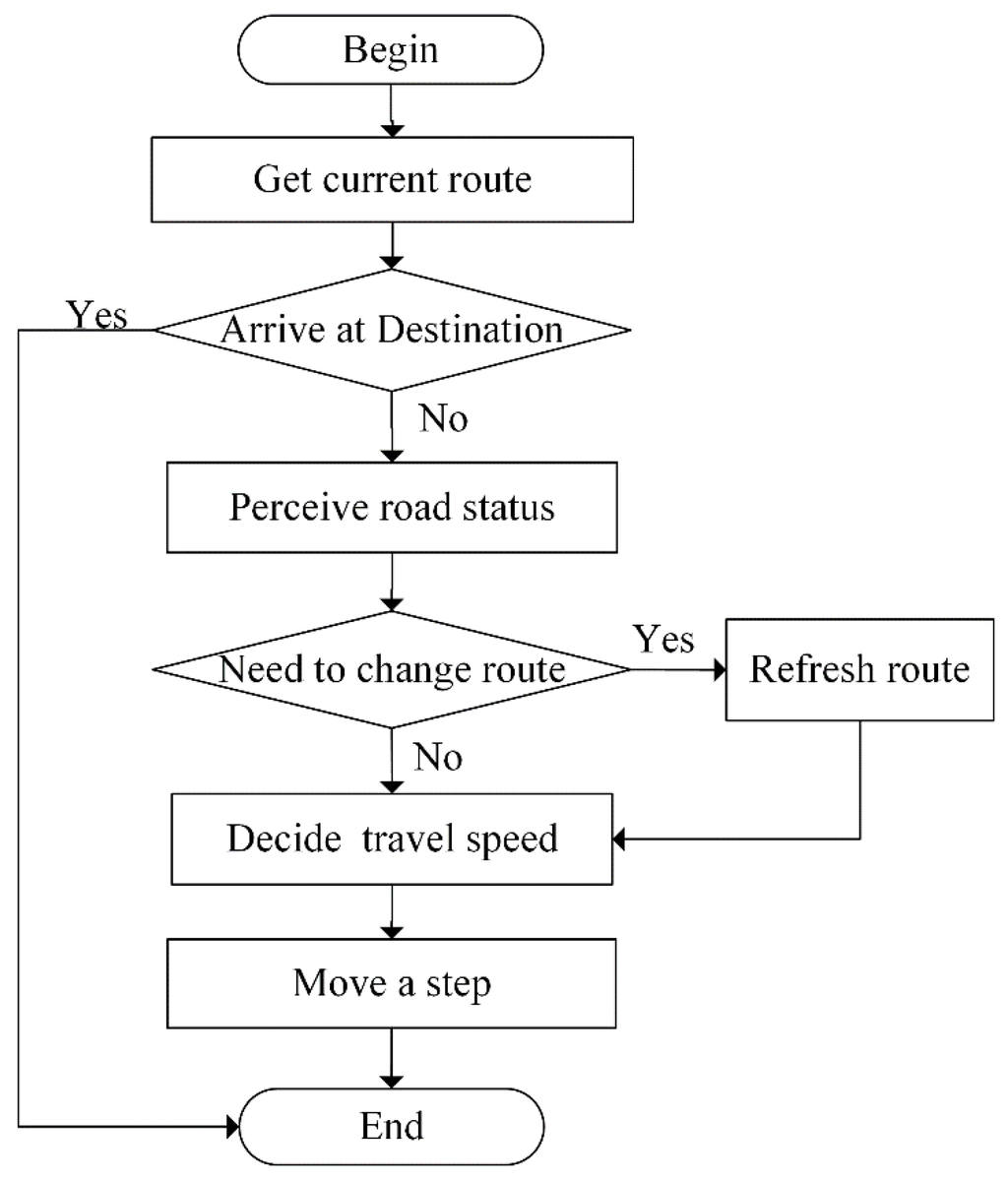
این آزمایش اول از یک مدل انتخاب راننده در مسیر استفاده کرد تا نشان دهد که چگونه یک مدل “موازی عامل” می تواند بر روی این سیستم ساخته و اجرا شود. مدل در این مورد تغییر مسیر توسط رانندگان فردی در بزرگراه را زمانی که اطلاعات ترافیکی در زمان واقعی ارائه میکرد شبیهسازی کرد. شکل 9 نمودار جریان مدل انتخاب راننده در مسیر طراحی شده است.
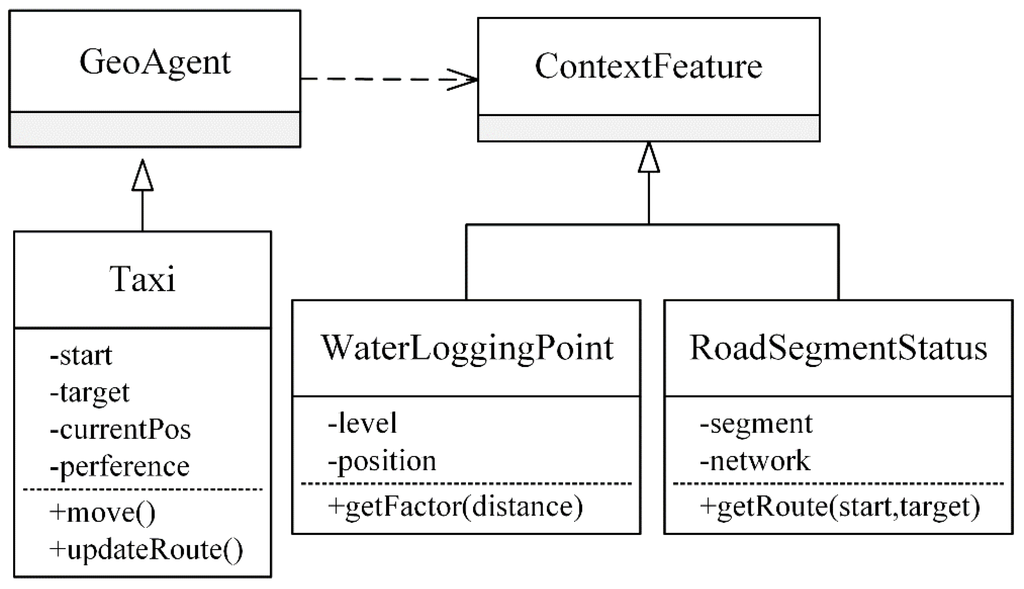
این مدل انتخاب راننده در مسیر با 10000 عامل خودروی سیار و مجموعه داده شبکه جاده ای از ایالات متحده به هم پیوسته آزمایش شده است. شبکه راه ها از 86141 لبه و 68909 گره تشکیل شده است. از شکل 9 نشان داده شده است ، مبدا و مقصد هر عامل خودرو قبل از شبیه سازی به طور تصادفی انتخاب شده است. در این شبیهسازی یک اورژانس حملونقل تصادفی مانند آبریزی در شبکه جادهای رخ داده و حملونقل اطراف آن را مسدود کرده است. اطلاعات بلادرنگ، به عنوان مثال، وضعیت شبکه جادهای، جمعآوری و برای همه عوامل خودروی سیار پخش شد. هنگامی که با اطلاعات ترافیک بلادرنگ تغذیه می شود، نماینده ماشین سیار تصمیم می گیرد و مسیر جایگزین را با توجه به کمترین هزینه سفر انتخاب می کند ( یعنی، زمان سفر به اینجا). بر اساس کلاسهای انتزاعی در DiSIME، یک کلاس عامل تاکسی نقش تصمیمگیری را از کلاس GeoAgent در مدل به ارث میبرد و دو کلاس ContextFeature اضافی، WaterLoggingPoint و RoadSegment، به عنوان بافت پویا مشتق شدهاند که در شکل 10 نشان داده شدهاند .
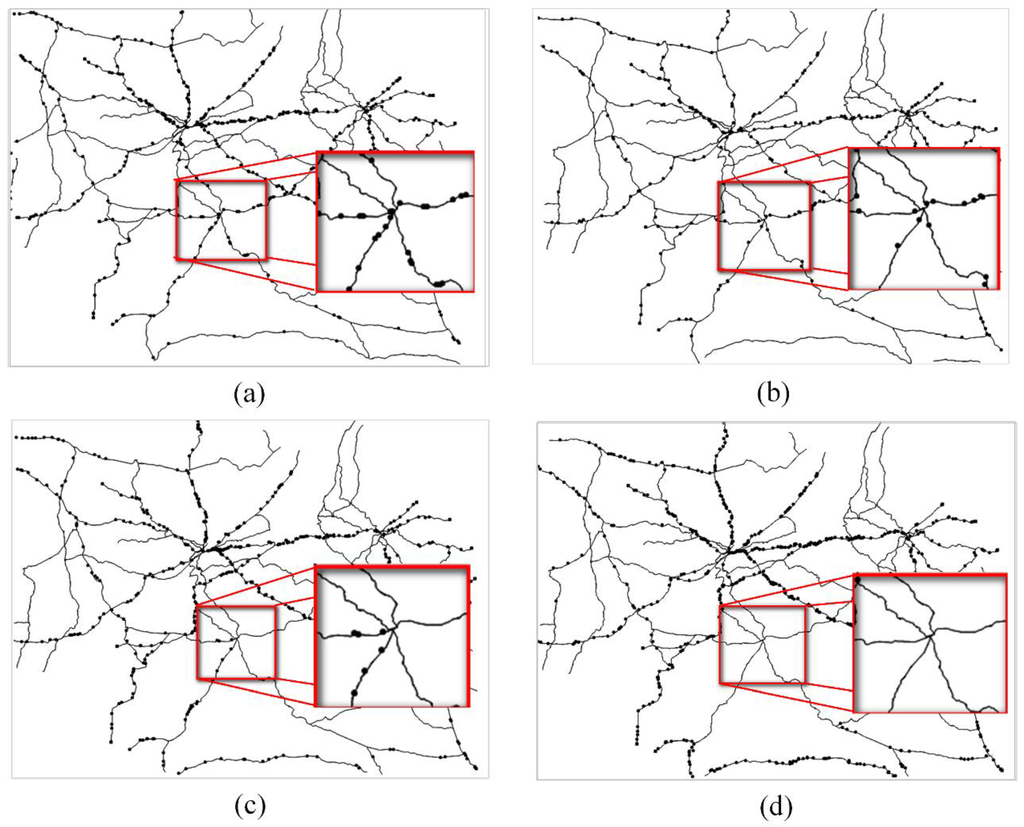
شکل 11 فرآیند شبیه سازی دینامیکی مدل انتخاب راننده در مسیر را نشان می دهد. یک غرقاب در ناحیه مستطیل قرمز رخ می دهد ( شکل 11 a). همانطور که آب گرفتگی شدیدتر می شود (سطح آب در شکل 11 b–d از 1 به 3 تغییر می کند)، تاکسی های کمتری از این منطقه عبور می کنند که باعث بار حمل و نقل سنگین در جاده های دیگر می شود.
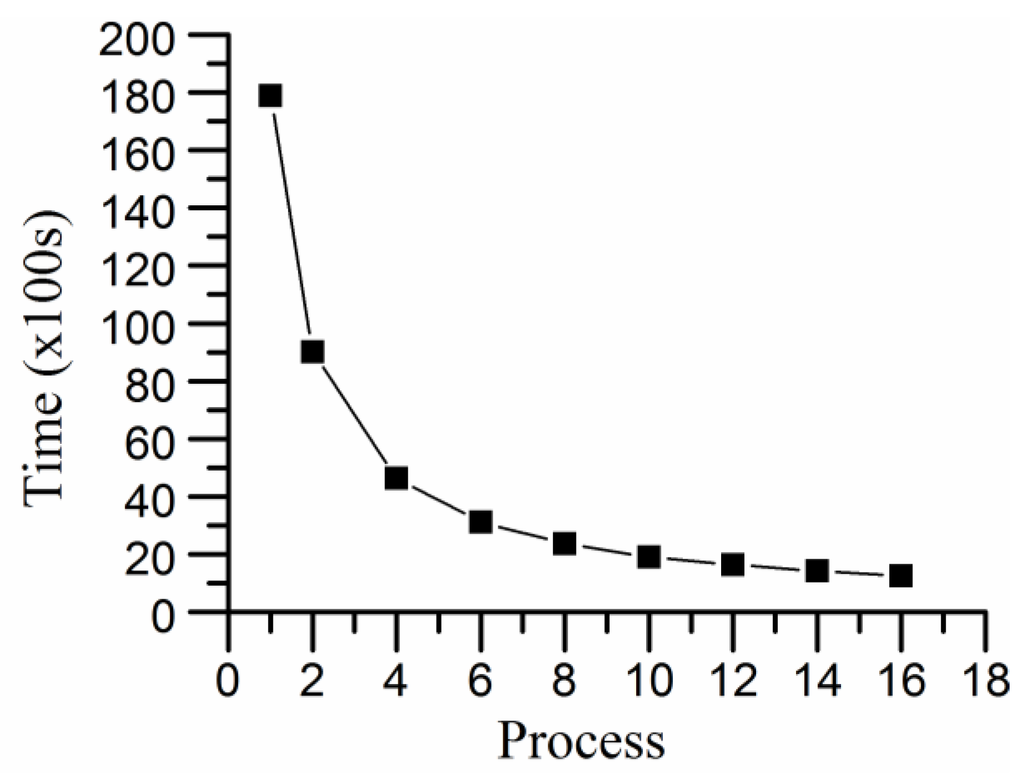
کل خودروهای متحرک طبق سفارش آنها تقسیم شده و به واحدهای محاسباتی مختلف توزیع می شود. کل زمان شبیه سازی با پیکربندی های مختلف گره اجرایی، همانطور که در جدول 2 نشان داده شده است، اندازه گیری می شود . در شکل 12 نشان داده شده است ، با افزایش تعداد گره های شبیه سازی، کل زمان اجرای مدل به شدت کاهش می یابد.
همانطور که در شکل 13 نشان داده شده است ، سرعت کل تقریباً خطی است زیرا هیچ ارتباطی بین عوامل موبایل وجود ندارد. با این حال، زمانی که تعداد پردازنده به هشت افزایش مییابد، زمان اجرای کل کندتر کاهش مییابد و بازده موازی از 1 به حدود 0.88 کاهش مییابد. به طور کلی، پیادهسازی این مدل موازی انتخاب راننده در مسیر در سیستم 4D-SAS بیاهمیت است، اما مقیاسپذیری آن بسیار بالا است، به طور مداوم حدود 90%.
7.3. مطالعه موردی شبیهسازی مدل «موازی دامنه».
این مورد دوم میتواند بررسی کند که چگونه این سیستم میتواند از توسعه یک مدل موازی دامنه پشتیبانی کند. این آزمایش از یک مدل اتوماتای سلولی (CA) برای توصیف پویایی آتشسوزی جنگلی در یک منظره کوهستانی استفاده میکند.
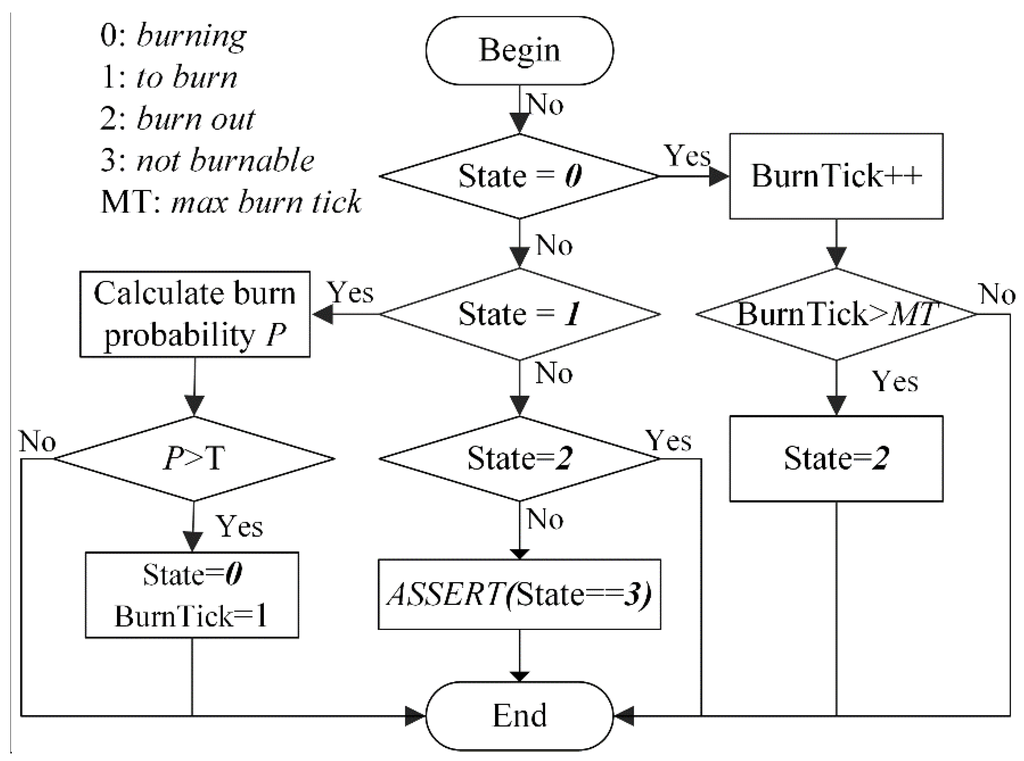
مدل مبتنی بر CA یک رویکرد بالغ برای مدلسازی گسترش آتشسوزیهای جنگلی بوده است [ 22 ، 23 ، 24 ، 49 ]. در مدلهای مبتنی بر CA، چشمانداز جغرافیایی ابتدا به یک آرایه دو بعدی از واحدهای مربعی یکسان تقسیم میشود و هر واحد توسط یک عامل سلولی در مدل نشان داده میشود. فاکتورهای اساسی یک مدل CA شامل وضعیت اولیه یک سلول و قوانین به روز رسانی وضعیت (مثلاً نسوخته، سوزانده یا سوخته) از یک بازه زمانی به بعد است. به این ترتیب مدل می تواند زمان رسیدن جبهه آتش را از یک سلول به سلول دیگر محاسبه کند. قوانین بهروزرسانی محلی معمولاً به ویژگی این سلول و وضعیت سلولهای همسایه آن بستگی دارد. شکل 14نمودار جریان و قوانین به روز رسانی وضعیت مدل گسترش آتش سوزی جنگلی مبتنی بر CA طراحی شده است.
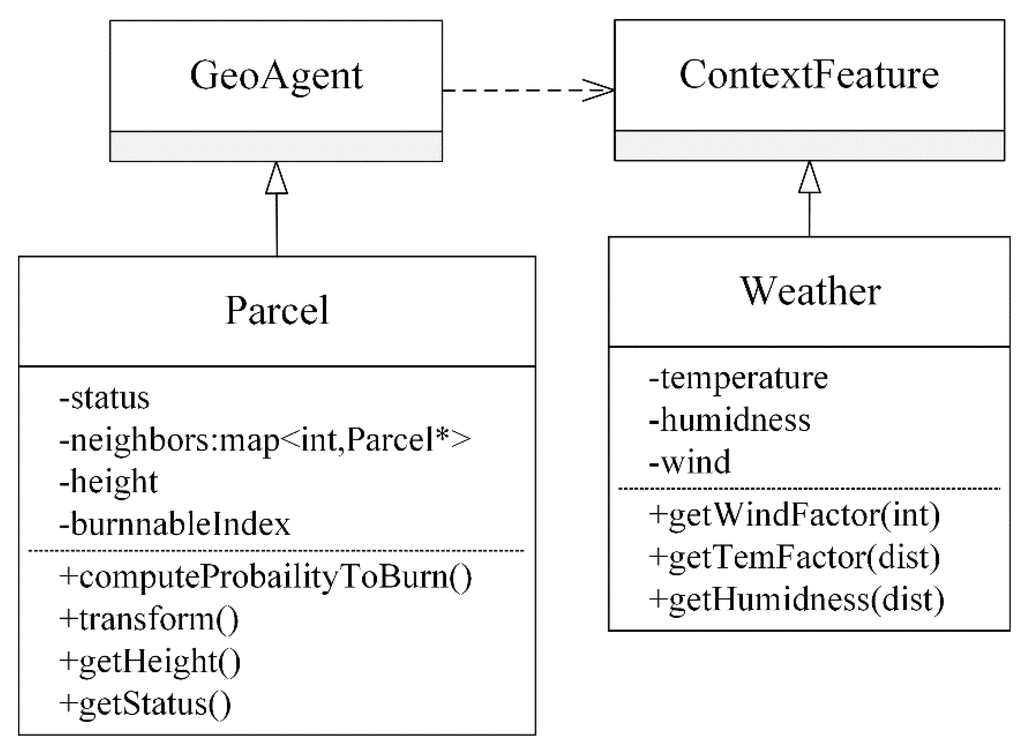
اطلاعات زمان واقعی آب و هوا از قبل جمع آوری شده و به مدل شبیه سازی آتش سوزی جنگل، از جمله سرعت باد، جهت باد، دما و رطوبت وارد می شود. سرعت باد و جهت آن یک پارامتر برداری را تشکیل می دهد. دمای محیط یک پارامتر اسکالر است. هر چه دما بالاتر باشد، احتمال سوختن سلول زمینی با همسایگان در حال سوختن بیشتر است. رطوبت محیط از 0 تا 1 رنج می برد. رطوبت بیشتر احتمال سوختن سلول زمینی را کاهش می دهد. اطلاعات تراکم پوشش گیاهی، نوع پوشش گیاهی و شیب زمین از تصاویر سنجش از دور و مدلهای ارتفاع دیجیتال استخراج میشوند. همانطور که در مطالعه موردی اول، دو کلاس جدید، Parcel و Weather، از کلاس های انتزاعی DiSIME مشتق شده اند، همانطور که در شکل 15 نشان داده شده است..
اندازه شبکه CA 2 بعدی 7721 × 6233 پیکسل با وضوح پیکسل 30 متر است. نتایج شبیه سازی گسترش آتش در شکل 16 نشان داده شده است . قسمت های سیاه رنگ آخرین ناحیه سوخته هستند در حالی که خطوط قرمز تکامل جبهه آتش را در فاصله 1 ساعت نشان می دهد. چهار تصویر گسترش آتش را با جهت باد ثابت اما با سرعت باد متفاوت نشان می دهد: (الف) صفر کیلومتر در ساعت، (ب) 5 کیلومتر در ساعت، (ج) 10 کیلومتر در ساعت، و (د) 15 کیلومتر در ساعت. بر اساس روش “دامنه موازی”، تمام سلول ها به مجموعه ای از مستطیل های مساوی تقسیم می شوند که سپس به واحدهای محاسباتی مختلف توزیع می شوند.
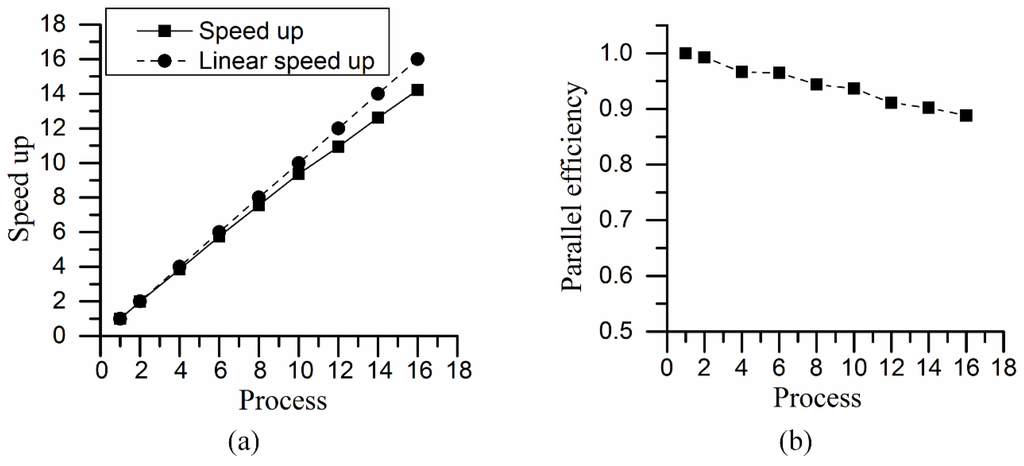
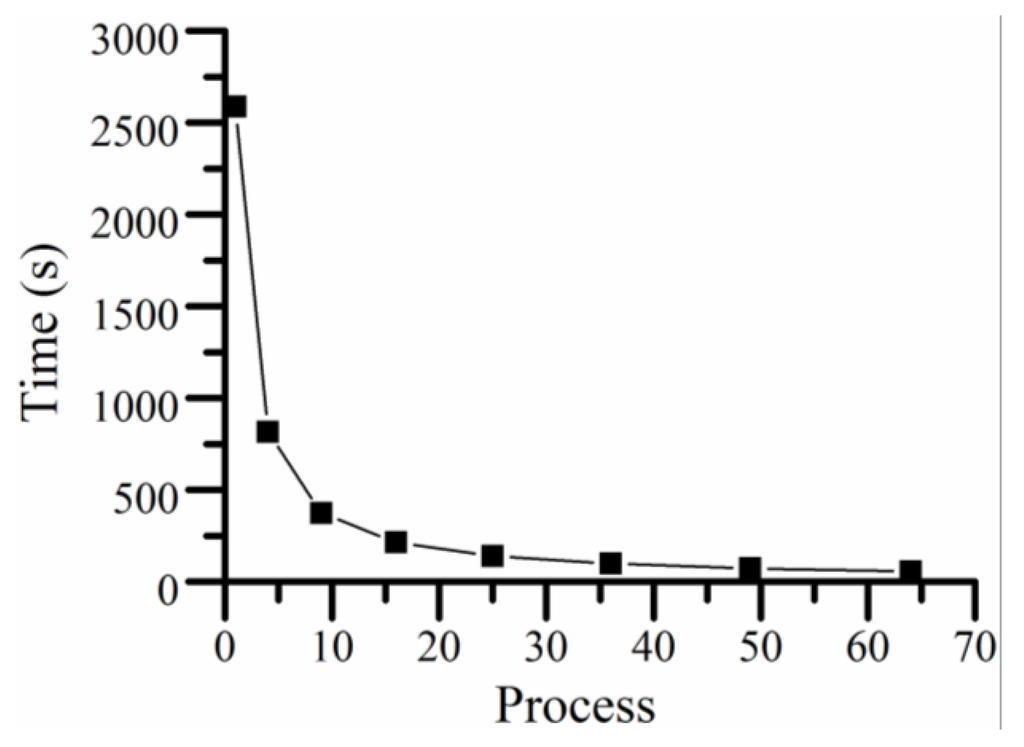
جدول 3 کل زمان شبیه سازی را با پیکربندی های مختلف گره اجرا فهرست می کند. در شکل 17 نشان داده شده است ، زمانی که تعداد گره های شبیه سازی از یک به 16 افزایش می یابد، زمان اجرا به سرعت کاهش می یابد. شکل 18 سرعت و کارایی موازی مربوطه را نشان می دهد.
هنگامی که تعداد گره های شبیه سازی بیش از 16 افزایش می یابد، زمان اجرا بسیار کندتر کاهش می یابد. سرعت کل به طور پیوسته از نزدیک به سه به حدود 36 افزایش یافت، در حالی که راندمان موازی حدود 0.75 بود و تغییر زیادی نکرد.
7.4. بحث
در طول این آزمایشها، دو مدل شبیهسازی دو سناریو شبیهسازی معمولی را نشان میدهند. مدل اول شبیهسازیهای چند عاملی رایج را نشان میدهد که شامل مجموعهای از عوامل گسسته، هوشمند و متحرک است. مدل دوم شبیهسازیهای اتوماتای سلولی مبتنی بر شبکه را نشان میدهد، که در آن سلولها ثابت هستند اما دارای تغییر وضعیت مکرر هستند. توسعه این دو مدل در 4D-SAS پیشنهادی نشان میدهد که 4D-SAS میتواند یک پلت فرم کارآمد برای مدلسازی جغرافیایی مبتنی بر دادههای دینامیکی فراهم کند. در مقایسه با پلتفرمهای شبیهسازی موازی موجود، از جمله FLAME، DMASON، و Repast HPC، 4D-SAS مستقیماً دادههای مکانی را در مدلسازی ادغام میکند، به عنوان مثال، شبکه جادهای مبتنی بر Shapefile در مورد 1، تصاویر سنجش از دور و DEM در مورد 2. این قابلیت یکپارچه سازی داده های مکانی 4D-SAS نمایش مدل را تا حد زیادی افزایش می دهد و هزینه های ساخت مدل را کاهش می دهد. این پلتفرم های موجود همیشه تمام ورودی های مدل را قبل از شبیه سازی تعریف می کنند. در مقابل، 4D-SAS با موفقیت داده های پویا بلادرنگ را هنگام اجرای شبیه سازی ها ترکیب می کند. این ترکیب پویا میتواند اطلاعات بهروز را برای بافت مدل فراهم کند و نتایج شبیهسازی دقیقتری را به دست آورد، که میتواند برای تصمیمگیری و برنامهریزی پشتیبانی کند.
در این دو شبیه سازی موازی، دو بازده موازی هر دو بالای 0.7 بودند. که در شکل 13 ب و شکل 18 ب نشان داده شده است، راندمان موازی شبیه سازی انتخاب راننده کمی بیشتر از شبیه سازی انتشار آتش است، حدود 0.9 در مقابل.0.75. این را می توان به درخواست وضعیت مکرر عوامل و به روز رسانی بین مستطیل های مجاور در شبیه سازی انتشار آتش نسبت داد. در طول هر تکرار، هر مستطیل وضعیت فعلی سلول های همپوشانی را از مستطیل های همسایه درخواست می کند و سلول های مربوطه را در منطقه خود به روز می کند. برعکس، عوامل سیار در شبیه سازی انتخاب راننده مستقل هستند و هیچ ارتباط مستقیمی بین یکدیگر وجود ندارد. در طول شبیه سازی انتخاب درایور، گره اصلی تنها نیاز به جمع آوری وضعیت زمینه درشت از همه گره های محاسباتی برای به دست آوردن آمار کلی دارد و این اطلاعات را در تمام گره های محاسباتی برده پراکنده می کند. سربار ارتباط در شبیه سازی انتخاب راننده بسیار کمتر از شبیه سازی انتشار آتش است. از این رو،
در شکل 13 ب و شکل 18ب، راندمان موازی شبیهسازی انتخاب راننده در مقایسه با شبیهسازی انتشار آتش، تمایل به کاهش بیشتری دارد. در شبیه سازی انتشار آتش، راندمان موازی در حدود 0.75 باقی می ماند و بسیار آهسته از بین می رود. در حالی که راندمان در شبیه سازی انتخاب راننده از 1 به حدود 0.88 کاهش می یابد. این را می توان به حالت های ارتباطی مختلف بین آنها، ارتباط متمرکز و ارتباط همتایان نسبت داد. هنگامی که گرههای محاسباتی در شبیهسازی انتخاب راننده افزایش مییابند، ارتباط سنگین با گره اصلی کارایی را خیلی سریع کاهش میدهد و گره اصلی را به یک گلوگاه تبدیل میکند. برای حالت ارتباط همتا در شبیه سازی انتشار آتش، حجم ارتباط بین گره های مجاور افزایش نمی یابد، اما با افزایش گره های محاسباتی کاهش می یابد. اگرچه تعداد کل ارتباطات افزایش خواهد یافت. بنابراین، کارایی موازی آن به تعداد گره های شبیه سازی حساس نیست. نتایج شبیهسازی موازی نشان میدهد که 4D-SAS برای شبیهسازی فضایی در مقیاس بزرگ مناسب است و به طور موثر از منابع موازی زیربنایی بهرهبرداری میکند. علاوه بر پشتیبانی موازیسازی کارآمد، تجسم آنلاین یکی از ویژگیهای 4D-SAS در مقایسه با پلتفرمهای شبیهسازی موازی موجود است، بهعنوان مثال، اجتناب از مسیر آبریزی در Case 1 و انتشار جبهه آتش در Case 2 بهموقع به کاربران/تحلیلگران نمایش داده میشود. بدون تاخیر زیاد نتایج شبیهسازی موازی نشان میدهد که 4D-SAS برای شبیهسازی فضایی در مقیاس بزرگ مناسب است و به طور موثر از منابع موازی زیربنایی بهرهبرداری میکند. علاوه بر پشتیبانی موازیسازی کارآمد، تجسم آنلاین یکی از ویژگیهای 4D-SAS در مقایسه با پلتفرمهای شبیهسازی موازی موجود است، بهعنوان مثال، اجتناب از مسیر آبریزی در Case 1 و انتشار جبهه آتش در Case 2 بهموقع به کاربران/تحلیلگران نمایش داده میشود. بدون تاخیر زیاد نتایج شبیهسازی موازی نشان میدهد که 4D-SAS برای شبیهسازی مکانی در مقیاس بزرگ مناسب است و به طور موثر از منابع موازی زیربنایی بهرهبرداری میکند. علاوه بر پشتیبانی موازی سازی کارآمد، تجسم آنلاین یکی از ویژگی های 4D-SAS در مقایسه با پلتفرم های شبیه سازی موازی موجود است، به عنوان مثال، اجتناب از مسیر آب در Case 1 و انتشار جبهه آتش در Case 2 به موقع به کاربران / تحلیلگران نمایش داده می شود. بدون تاخیر زیاد
8. نتیجه گیری
این مقاله یک سیستم شبیهسازی توزیعشده قدرتمند برای مدلسازی فرآیندهای جغرافیایی عظیم، 4D-SAS، ارائه میدهد که توسط محاسبات با کارایی بالا تسهیل میشود. این سیستم پشتیبانی عمومی را برای مدلسازی پدیدههای جغرافیایی پویا فراهم میکند و چالشهای محاسباتی را با تقسیم محاسبات شبیهسازی بین گرههای محاسباتی مختلف به ترتیب عامل یا با تجزیه فضایی برطرف میکند. علاوه بر این، از دریافت داده های حسگر در مدل های شبیه سازی پشتیبانی می کند و وضعیت های زمینه در زمان واقعی به روز می شوند. برای این سیستم شبیهسازی، یک ماژول تجسم آنلاین نیز بر اساس SharpMap توسعه داده شد تا انیمیشنهای توسعه سیستم را نمایش دهد تا به مشتریان کمک کند خروجیهای مدل را به طور موثر درک کنند. نتایج شبیه سازی از دو مدل مختلف ABM،
در آینده نزدیک، این سیستم 4D-SAS با ارائه یک ماژول طراحی عامل گرافیکی و کتابخانه های عامل مخصوص دامنه برای پشتیبانی از توسعه سریع برنامه توسعه خواهد یافت. یک الگوریتم زمانبندی آگاه از فضای مکانی باید برای کارایی بهتر شبیهسازی و تعادل بار کار بررسی شود.
اختصارات
| 4D-SAS |
یک سیستم شبیهسازی و تحلیل مبتنی بر دادههای دینامیکی توزیعشده برای مدلسازی مبتنی بر عامل فضایی عظیم
|
| ABM |
مدل سازی مبتنی بر عامل
|
| CA |
اتومات زیرزمینی
|
| DiSTDB |
پایگاه داده فضایی و زمانی توزیع شده
|
| DiSIME |
موتور شبیه سازی ABM توزیع شده
|
| VAUI |
رابط کاربری تجسم و تجزیه و تحلیل آنلاین
|
| DIT |
ابزار تزریق داده
|
منابع
- وانگ، دی. بری، مگاوات؛ کار، EA؛ گراس، LJ یک مدل چشم انداز ماهی موازی برای مدل سازی اکوسیستم. شبیه سازی 2006 ، 82 ، 451-465. [ Google Scholar ] [ CrossRef ]
- تانگ، دبلیو. وانگ، اس. ترانس. GIS 2009 ، 13 ، 315-333. [ Google Scholar ] [ CrossRef ]
- شوک، ای. وانگ، اس. تانگ، دبلیو. یک چارچوب آگاه از ارتباط برای مدلهای مبتنی بر عامل موازی صریح فضایی. بین المللی جی. جئوگر. Inf. علمی 2013 ، 27 ، 2160-2181. [ Google Scholar ] [ CrossRef ]
- بنت، دی. تانگ، دبلیو. نمایش سیستمهای فضایی تطبیقی پیچیده. در دسترس آنلاین: http://citeseer.ist.psu.edu/viewdoc/summary?doi=10.1.1.309.5501&rank=2 (در 21 ژانویه 2016 قابل دسترسی است).
- جانستون، تحلیلگر عامل KM : مدلسازی مبتنی بر عامل در Arcgis ; ESRI Press: Redlands، CA، USA، 2013. [ Google Scholar ]
- براون، DG; ریلو، آر. رابینسون، دی.تی. شمال، م. رند، دبلیو. مدلهای فرآیند و داده فضایی: به سوی ادغام مدلهای مبتنی بر عامل و GIS. جی. جئوگر. سیستم 2005 ، 7 ، 25-47. [ Google Scholar ] [ CrossRef ]
- پارکر، دی سی؛ منسون، اس ام. Janssen، MA; هافمن، ام جی; Deadman، P. سیستم های چند عاملی برای شبیه سازی تغییر کاربری و پوشش زمین: بررسی. ان دانشیار صبح. Geogr. 2003 ، 93 ، 314-337. [ Google Scholar ] [ CrossRef ]
- O’Sullivan، D. علم اطلاعات جغرافیایی: مدل های مبتنی بر عامل. Progress Human Geogr. 2008 . [ Google Scholar ] [ CrossRef ]
- باتی، م. Jiang, B. شبیه سازی چند عاملی: رویکردهای جدید برای کاوش دینامیک فضا-زمان در GIS . مرکز تحلیل فضایی پیشرفته (UCL): لندن، بریتانیا، 1999. [ Google Scholar ]
- Torrens، PM Geosimulation، اتومات ها و مدل سازی ترافیک. هندب ترانسپ 2004 ، 5 ، 549-565. [ Google Scholar ]
- متیوز، RB; گیلبرت، NG; روچ، ا. پولهیل، جی جی. گاتز، مدلهای کاربری زمین مبتنی بر عامل NM: مروری بر کاربردها. Landsc. Ecol. 2007 ، 22 ، 1447-1459. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گریم، وی. ده سال مدلسازی مبتنی بر فردی در بومشناسی: چه چیزهایی آموختهایم و چه چیزی میتوانیم در آینده بیاموزیم؟ Ecol. مدل. 1999 ، 115 ، 129-148. [ Google Scholar ] [ CrossRef ]
- دیزنبرگ، سی. ون در هوگ، اس. داوید، H. Eurace: یک مدل موازی مبتنی بر عامل از اقتصاد اروپا. Appl. ریاضی. محاسبه کنید. 2008 ، 204 ، 541-552. [ Google Scholar ] [ CrossRef ]
- آرمسترانگ، MP جغرافیا و علوم محاسباتی. ان دانشیار صبح. Geogr. 2000 ، 90 ، 146-156. [ Google Scholar ] [ CrossRef ]
- گوان، کیو. Clarke، KC یک برنامه آزمایشی کتابخانه برنامه نویسی برنامه نویسی پردازش شطرنجی موازی همه منظوره با استفاده از یک مدل اتوماتای سلولی جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 695-722. [ Google Scholar ] [ CrossRef ]
- کیران، م. ریچموند، پی. هولکامب، ام. چانه، LS; ورث، دی. Greenough, C. Flame: شبیه سازی جمعیت های زیادی از عوامل در معماری های سخت افزاری موازی. در مجموعه مقالات نهمین کنفرانس بین المللی در مورد عوامل خودمختار و سیستم های چند عاملی، تورنتو، ON، کانادا، 10-14 مه 2010. صفحات 1633-1636.
- کولیر، ن. شمال، M. شبیه سازی مبتنی بر عامل موازی با repast برای محاسبات با کارایی بالا. شبیه سازی 2013 ، 89 ، 1215-1235. [ Google Scholar ] [ CrossRef ]
- رای، اس. Xiaolin، H. تشخیص الگوی رفتار برای همسان سازی داده ها در شبیه سازی مبتنی بر عامل محیط های هوشمند. در مجموعه مقالات کنفرانس های مشترک بین المللی IEEE/WIC/ACM 2013 در زمینه هوش وب (WI) و فناوری های عامل هوشمند (IAT)، آتلانتا، GA، ایالات متحده آمریکا، 17-20 نوامبر 2013. صص 171-178.
- وانگ، ام. Hu, X. شبیهسازی دادهها در شبیهسازی مبتنی بر عامل محیطهای هوشمند با استفاده از فیلترهای ذرات. شبیه سازی مدل. تمرین کنید. نظریه 2015 ، 56 ، 36-54. [ Google Scholar ] [ CrossRef ]
- بالبو، اف. Pinson, S. استفاده از عوامل هوشمند برای طراحی سیستم پشتیبانی مقررات حمل و نقل. ترانسپ Res. قسمت C Emerg. تکنولوژی 2010 ، 18 ، 140-156. [ Google Scholar ] [ CrossRef ]
- برمیستر، بی. حدادی، ع. Matylis، G. کاربرد سیستم های چند عاملی در ترافیک و حمل و نقل، مهندسی نرم افزار. IEE Proc. 1997 ، 144 ، 51-60. [ Google Scholar ]
- کارافیلیدیس، آی. Thanailakis، A. مدلی برای پیش بینی گسترش آتش سوزی جنگل با استفاده از اتوماتای سلولی. Ecol. مدل. 1997 ، 99 ، 87-97. [ Google Scholar ] [ CrossRef ]
- کوارتیری، ج. مستوراکیس، NE; ایانونه، جی. Guarnaccia، C. مدل اتوماتای سلولی برای پیش بینی گسترش آتش. آخرین روندهای طرح شهری. ترانسپ 2010 ، 204 ، 173-178. [ Google Scholar ]
- برجک، اس جی; Hearne, JW یک مدل خودکار سلولی بهبود یافته برای شبیه سازی آتش در یک سیستم ساوانای ناهمگن فضایی. Ecol. مدل. 2002 ، 148 ، 133-151. [ Google Scholar ] [ CrossRef ]
- Geweke، J. مدل سازی کلان اقتصاد سنجی و نظریه عامل نماینده. صبح. اقتصاد Rev. 1985 , 75 , 206-210. [ Google Scholar ]
- پری، منابع انسانی؛ Evans، AJ تجزیه و تحلیل مقایسه ای از روش های پردازش موازی و فوق فردی برای بهبود عملکرد محاسباتی یک مدل بزرگ مبتنی بر فردی. Ecol. مدل. 2008 ، 214 ، 141-152. [ Google Scholar ] [ CrossRef ]
- Hellweger، FL مدلسازی مبتنی بر فردی صریح فضایی با استفاده از چگالی فوق فردی ثابت. محاسبه کنید. Geosci. 2008 ، 34 ، 144-152. [ Google Scholar ] [ CrossRef ]
- چلیک، ن. لی، اس. واسودوان، ک. پسر، Y.-J. چارچوب شبیه سازی چند وفاداری مبتنی بر DDDAS برای سیستم های زنجیره تامین. IIE Trans. 2010 ، 42 ، 325-341. [ Google Scholar ] [ CrossRef ]
- Hu, X. شبیه سازی مبتنی بر داده پویا. Soc. مدل. شبیه سازی Mag. 2011 ، 1 ، 16-22. [ Google Scholar ]
- مدی، GR; بارباسی، ع.-ال. Chawla، NV; گونزالس، م. هاچن، دی. لانتز، بی. پاولینگ، ا. شونهارل، تی. سابو، جی. وانگ، پی. آگاهی موقعیتی پیشرفته: کاربرد مفاهیم DDDAS در مدیریت اضطراری و بلایا. در علوم محاسباتی – Iccs 2007 ; Springer Berlin Heidelberg: Berlin, Heidelberg, 2007; صص 1090-1097. [ Google Scholar ]
- دیالیا، م. ونزیانی، ع. روشهای جذب اندازهگیریهای سرعت خون در شبیهسازیهای همودینامیک: نتایج اولیه. Proc. محاسبه کنید. علمی 2010 ، 1 ، 1231-1239. [ Google Scholar ] [ CrossRef ]
- داگلاس، سی سی; لودر، RA; بیزلی، جی دی. مندل، جی. یوینگ، RE; افندیف، ی. گوان، کیو. اسکندرانی، م. کوئن، جی. Vodacek، A. و همکاران رویکردهای DDDAS برای مدلسازی آتشسوزی در مناطق وحشی و ردیابی آلایندهها. در مجموعه مقالات کنفرانس شبیه سازی زمستانی، مونتری، کالیفرنیا، ایالات متحده آمریکا، 3-6 دسامبر 2006. صص 2117–2124.
- بدر، ی. حریری، س. النشیف، ی. Blasch، E. خدمات سیستم های کاربردی داده محور پویا (DDDAS) انعطاف پذیر و قابل اعتماد برای محیط های مدیریت بحران. Proc. محاسبه کنید. علمی 2015 ، 51 ، 2623-2637. [ Google Scholar ] [ CrossRef ]
- چن، اچ. وانگ، جی. Feng, L. تحقیق در مورد معماری سیستم کاربردی مبتنی بر داده پویا برای پیشبینی تاخیر پرواز. جی. سافتو. 2012 ، 7 ، 263-268. [ Google Scholar ] [ CrossRef ]
- هوانگ، ی. Verbraeck، A. یک رویکرد داده محور پویا برای شبیه سازی سیستم حمل و نقل ریلی. در مجموعه مقالات کنفرانس شبیه سازی زمستانی، آستین، TX، ایالات متحده، 13-16 دسامبر 2009. صص 2553-2562.
- Bai, F. فیلترهای ذرات توزیع شده برای همسان سازی داده ها در شبیه سازی سیستم های زمانی فضایی در مقیاس بزرگ. دکتری پایان نامه، دانشگاه ایالتی جورجیا، آتلانتا، GA، ایالات متحده آمریکا، 2014. [ Google Scholar ]
- لی، ی. گونگ، جی. لیو، اچ. ژو، جی. آهنگ، ی. لیانگ، جی. شبیهسازی سیل در زمان واقعی با استفاده از مدل CA که توسط دادههای مشاهده پویا هدایت میشود. بین المللی جی. جئوگر. Inf. علمی 2014 ، 29 ، 1-13. [ Google Scholar ] [ CrossRef ]
- لو، جی. وو، زی. ون، ال. لین، سی. ژانگ، جی. یانگ، ی. پیشبینی سیل در زمان واقعی و نقشه هشدار سیل بر روی حوضه رودخانه Huaihe در چین با استفاده از یک سیستم مدلسازی آب و هواشناسی همراه. علمی چین سر. فناوری الکترونیک. علمی 2008 ، 51 ، 1049-1063. [ Google Scholar ] [ CrossRef ]
- Dia, H. یک رویکرد مبتنی بر عامل برای مدلسازی رفتار انتخاب مسیر راننده تحت تأثیر اطلاعات بلادرنگ. ترانسپ Res. قسمت C Emerg. تکنولوژی 2002 ، 10 ، 331-349. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دورین، ا. Geard، N. عمل تجسم مدل مبتنی بر عامل. آرتیف. زندگی 2014 ، 20 ، 271-289. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اسکلار، ای. یانسن، سی. چان، جی. برد، ام. به سمت روشی برای داده کاوی و تجسم مبتنی بر عامل. در تعامل عوامل و داده کاوی ; Springer: برلین، هایدلبرگ، 2012; صص 4-15. [ Google Scholar ]
- چرتوف، او. کوماروف، آ. میخائیلوف، آ. آندرینکو، جی. آندرینکو، ن. Gatalsky، P. Geovisualization از نتایج مدلسازی شبیهسازی جنگل: مطالعه موردی ترسیب کربن و تنوع زیستی. محاسبه کنید. الکترون. کشاورزی 2005 ، 49 ، 175-191. [ Google Scholar ] [ CrossRef ]
- وانگ، ایکس. ژو، ایکس. مدلسازی و مدیریت دادههای مکانی-زمانی: یک بررسی. در مجموعه مقالات سی و ششمین کنفرانس بین المللی فناوری زبان ها و سیستم های شی گرا، ابزارها-آسیا 2000، شیان، چین، 30 اکتبر تا 4 نوامبر 2000. ص 202-211.
- لین، ی. لیو، W.-Z. چن، جی. مدل سازی به روز رسانی تدریجی پایگاه داده فضایی بر اساس حالت پایه با اصلاحات. Proc. سیاره زمین. علمی 2009 ، 1 ، 1173-1179. [ Google Scholar ] [ CrossRef ]
- کریستاکوس، جی. Vyas، VM یک رویکرد ترکیبی فضا/زمان برای مطالعه توزیع ازن در شرق ایالات متحده. اتمس. محیط زیست 1998 ، 32 ، 2845-2857. [ Google Scholar ] [ CrossRef ]
- رائو، KV; گووردان، ع. Rao, KC مدلسازی شی گرا و پیاده سازی سیستم کشف دانش مکانی-زمانی. بین المللی جی. کامپیوتر. علمی Inf. تکنولوژی (IJCSIT) 2011 ، 3 . [ Google Scholar ] [ CrossRef ]
- لی، ایکس. یانگ، جی. گوان، ایکس. Wu، H. یک مدل دادههای مکانی-زمانی رویداد محور (E-ST) که از بیان پویا و شبیهسازی فرآیندهای جغرافیایی پشتیبانی میکند. ترانس. GIS 2014 ، 18 ، 76-96. [ Google Scholar ] [ CrossRef ]
- پلکیس، ن. تئودولیدیس، بی. کوپاناکیس، آی. تئودوریدیس، ی. بررسی ادبیات مدل های پایگاه داده مکانی-زمانی. بدانید. مهندس Rev. 2004 , 19 , 235-274. [ Google Scholar ] [ CrossRef ]
- الکساندریدیس، ا. وکالیس، د. Siettos، CI; بافاس، GV یک مدل اتوماتای سلولی برای پیشبینی گسترش آتشسوزی در جنگل: مورد آتشسوزی که در سال 1990 جزیره اسپتسس را فرا گرفت. Appl. ریاضی. محاسبه کنید. 2008 ، 204 ، 191-201. [ Google Scholar ] [ CrossRef ]
شکل 1. معماری کلی سیستم 4D-SAS پیشنهادی.
شکل 2. نمودار UML از کلاس های فضایی فعال در DiSIME.

شکل 3. تصویر تجزیه “موازی عامل” ( a ) و “دامنه موازی با اندازه بافر 1” تجزیه ( b ).
شکل 4. نمودار UML مدل داده مکانی-زمانی شی گرا در DiSTDB.
شکل 5. نمونه ای از رکوردهای حالت st-object.
شکل 6. جذب داده پویا که توسط ابزار تزریق داده پشتیبانی می شود.
شکل 7. نمونه ای از قالب XML از یک آیتم انتقال.

شکل 8. ماژول VAUI برای تجسم پویا و تجزیه و تحلیل آنلاین.
شکل 9. نمودار جریان مدل انتخاب راننده در مسیر.
شکل 10. نمودار UML کلاس های ارثی در مدل انتخاب راننده در مسیر.
شکل 11. تجسم پویا از شبیه سازی انتخاب راننده در مسیر (مستطیل قرمز نشان دهنده منطقه سیل زده و نقاط سیاه نشان دهنده اتومبیل های در حال رانندگی است). نتایج شبیه سازی با سطوح مختلف آبگیری: ( الف ) سطح ورود آب 0 است. ( ب ) سطح آبگیری 1 است. ( ج ) سطح آبگیری 2 است. ( د ) سطح آبگیری 3 است.
شکل 12. کل زمان شبیه سازی مدل انتخابی درایور در مسیر با شماره های مختلف پردازنده.
شکل 13. ( الف ) افزایش سرعت و ( ب ) کارایی موازی شبیه سازی انتخاب راننده موازی در مسیر.
شکل 14. قوانین تغییر مدل گسترش آتش سوزی جنگلی مبتنی بر CA.
شکل 15. نمودار UML کلاس های به ارث برده شده در مدل گسترش آتش سوزی جنگلی مبتنی بر CA.

شکل 16. تجسم دینامیکی شبیهسازی گسترش آتشسوزی جنگلی مبتنی بر CA با سرعت باد متفاوت (قسمتهای سیاه منطقه سوخته هستند و رنگ قرمز نشان دهنده جبهه آتش است). نتیجه شبیه سازی پس از تیک های مشابه شبیه سازی: ( الف ) سرعت باد 0 کیلومتر در ساعت است. ( ب ) سرعت باد 5 کیلومتر در ساعت است. ( ج ) سرعت باد 10 کیلومتر در ساعت است. ( د ) سرعت باد 15 کیلومتر در ساعت است.
شکل 17. کل زمان شبیه سازی مدل گسترش آتش سوزی جنگلی مبتنی بر CA با اعداد پردازنده های مختلف.
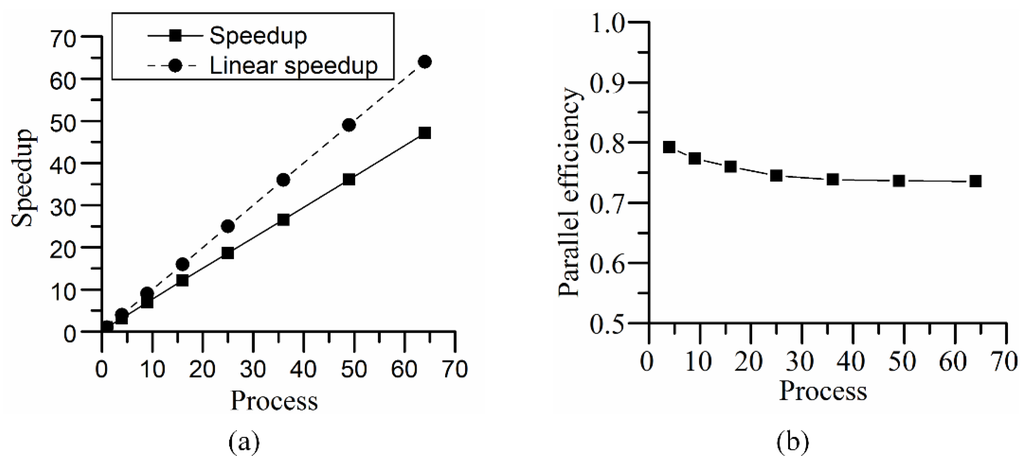
شکل 18. ( الف ) افزایش سرعت و ( ب ) کارایی موازی شبیهسازی گسترش آتشسوزی جنگلی مبتنی بر CA موازی.

جدول 1. پیکربندی دقیق سرورهای خوشه ای.
جدول 2. کل زمان شبیه سازی مدل انتخاب راننده در مسیر.
جدول 3. زمان شبیه سازی مدل گسترش آتش سوزی جنگلی مبتنی بر CA.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر