1. مقدمه
1.1. بیان انگیزه و مشکل
OpenStreetMap © (OSM) یک پروژه نقشه برداری جغرافیایی منبع باز است که نقشه دیجیتالی رایگان جهان را در اختیار عموم قرار می دهد. این منحصر به فرد است زیرا کاربران آن مشارکت کنندگان اصلی و مسئول ساخت و نگهداری نقشه هستند. مشارکتکنندگان OSM میتوانند نقشه را به روشهای مختلفی ویرایش (بهروزرسانی) کنند، از جمله استفاده از ایستگاهها و مسیرهای سیستم موقعیتیابی جهانی (GPS) برای شناسایی ویژگیها در میدان یا اندازهگیری تصاویر ماهوارهای برای شناسایی جادهها و سایر ویژگیهای جغرافیایی مورد علاقه [ 1 ].
این نوع مشارکت آزاد توسط مشارکتکنندگان داوطلب به عنوان جمعسپاری شناخته میشود و به بسیاری از داوطلبان اشاره دارد که اطلاعات را در پایگاه داده ارائه میکنند، جایی که هر داوطلب بخش کوچکی را که مربوط به پایگاه دانش محلی خود است، مشارکت میدهد. Goodchild [ 2 ] اصطلاح “اطلاعات جغرافیایی داوطلبانه” (VGI) را برای توصیف این نوع از فعالیت های جمع سپاری ابداع کرده است.
پدیده VGI سؤالات مهمی را در رابطه با تخصص مشارکت کنندگان آن، به ویژه هنگامی که در نقشه برداری از ویژگی های سطح زمین اعمال می شود، ایجاد می کند. به عنوان مثال، در ایالات متحده، یک نقشه بردار زمین باید مدرک لیسانس خود را در مهندسی نقشه برداری داشته باشد و چندین سال تجربه عملی داشته باشد تا واجد شرایط شرکت در آزمون های دولتی برای دریافت مجوز باشد. این آموزش تئوری اندازه گیری پیچیده مانند موقعیت یابی GPS، فتوگرامتری، سنجش از دور، تجزیه و تحلیل آماری حداقل مربعات، انتشار خطا، و قانون مرز حالت [ 3 ] را پوشش می دهد. علاوه بر این، هنگامی که نقشهبردار مجوز دریافت میکند، اکثر پروژههایی که روی آنها کار میکنند نیاز به رعایت استانداردهای دقیق نقشهبرداری و دستورالعملهای موقعیتیابی دارند [ 4 ، 5 ، 6 ]].
با این حال، مشارکت کنندگان OSM ملزم به داشتن تحصیلات یا آموزش رسمی در حرفه نقشه برداری نیستند، و همچنین ملزم به پیروی از استانداردهای موقعیت یابی برای استخراج داده های برداری موجود در پایگاه داده نیستند. همانطور که OSM همچنان به محبوبیت خود ادامه می دهد، انتظار می رود جامعه کاربر و مشارکت داده ها رشد کنند، به عنوان مثال، CloudMade، Apple و Ushahidi اکنون OSM را به عنوان یک لایه پایه برای برخی از برنامه های نقشه برداری خود ارائه می دهند [ 7 ، 8 ، 9 ]. این، همراه با فقدان استانداردهای نقشهکشی و کیفیت دادهها و انتظار روزی برای استفاده از این دادههای برداری برای برنامههای کاربردی حساستر از نظر موقعیت جغرافیایی، مانند ناوبری GPS، کاربران بالقوه و محققین را مجبور میکند تا صحت پایگاه داده را زیر سوال ببرند.
1.2. راه حل پیشنهادی
برای پرداختن به این موضوع، یک رویکرد فتوگرامتری دقیق برای تعیین دقت موقعیتی جادههای OSM با استفاده از تصاویر استریو هوایی، نقاط کنترل زمینی (GCP) و یک مدل تنظیم برداری برای تعیین موقعیتهای جغرافیایی دنیای واقعی برای نقاط شکل OSM اتخاذ میشود. تنظیم برداری بر اساس یک مدل تنظیم بسته فتوگرامتری سنتی است و منجر به موارد زیر می شود: (1) مکان های نقطه شکل OSM تنظیم شده، (2) باقیمانده های نقطه شکل (که دقت موقعیت را توصیف می کنند)، و (3) مناطق اطمینان در مورد نقطه شکل تنظیم شده مکان ها، خطای دایره ای و خطای خطی در صدک 90 (CE90/LE90).
مزیت این رویکرد این است که مبتنی بر بازآفرینی هندسه حسگر موجود در هنگام گرفتن عکس و استفاده از اصول ثابت شده فتوگرامتری برای تخمین موقعیت زمین است. رویکرد پیشنهادی اعوجاجهای موجود در سیستم تصویربرداری را در نظر میگیرد و اصلاحات (جهتگیری داخلی) را برای نمایش دقیقتر موقعیت تصویر ایدهآل، بدون خطای سیستماتیک اعمال میکند. GCPها برای جهت گیری مطلق تصاویر و ایجاد یک رابطه دقیق تصویر به زمین از طریق یک مدل استریو تحلیلی استفاده می شوند. تنظیم برداری امکان تنظیم همزمان تمام نقاط شکل برداری را در یک زمان فراهم می کند، در نتیجه افزونگی بیشتری را به مدل حداقل مربعات ارائه می دهد و اعتماد کلی به نتایج را بهبود می بخشد. این رویکرد همچنین مستقل از مکان و مجموعه داده برداری است،
برای نشان دادن اثبات مفهوم، تنظیم برداری پیشنهادی برای محاسبه دقت موقعیتی چندین خیابان شهری شبکهبندی شده شهری در پایگاه داده OSM استفاده شد. علاوه بر این، برای اعتبارسنجی عملکرد، متریک ریشه میانگین مربعات خطا (RMSE) برای باقیماندههای تنظیم با مقدار RMSE تعیینشده از تفاوتهای بین پایگاه داده OSM و مکان مربوطه که توسط تکنیکهای نقشهبرداری GPS با دقت بالا تعیین میشود، مقایسه میشود. ). این نوع مقایسه راهی کمی برای توصیف عملکرد تنظیم ارائه میکند و نشان میدهد که دقت موقعیتی محاسبهشده با آنچه واقعاً در پایگاه داده وجود دارد سازگار است. هنگامی که این اطلاعات دقت موقعیتی شناخته شد، می توان آن را به عنوان یک ویژگی به نقاط شکل برداری و چند خطوط در سطح ویژگی حمل کرد.
برای نشان دادن کاربرد عملی تنظیم برداری، ارزیابی دقت سر به سر بین OSM [ 10 ]، نقشه ملی سازمان زمین شناسی ایالات متحده (USGS) (TNM) [ 11 ] و اداره سرشماری ایالات متحده از لحاظ توپولوژیکی یکپارچه جغرافیایی رمزگذاری ارجاع دهی (TIGER) 2007 [ 12 ] بردارهای جاده برای تعیین اینکه کدام پایگاه داده از نظر موقعیتی بیشترین دقت را در منطقه آزمایشی دارد، انجام شد. داشتن رویکردی برای درک دقت مکانی دادههای جغرافیایی میتواند برای بسیاری از برنامهها از جمله برنامهریزی مسیر، ناوبری GPS و ” تلفیقی هوشمند ” که بردارهای مرجع/هدف بر اساس دقت موقعیتی آنها انتخاب میشوند، مفید باشد.
2. سابقه و کار قبلی
مروری بر ادبیات موجود مربوط به تعیین دقت موقعیتی داده های برداری، بینشی را در مورد تحقیقات کلیدی انجام شده در این موضوع ارائه کرده است. Goodchild و Hunter [ 13 ] پیشنهاد می کنند که دقت موقعیتی اشیاء فضایی را می توان از طریق اندازه گیری تفاوت بین مکان ظاهری ویژگی ثبت شده در پایگاه داده و مکان واقعی ویژگی تعریف کرد. معیارهای مختلفی که دقت موقعیتی را توصیف میکنند بسته به هندسه ویژگی مورد آزمایش ارائه میشوند، به عنوان مثال، دقت نقاط معمولاً به صورت تخمین خطای RMSE بیان میشود، در حالی که ویژگیهای خطی را میتوان با استفاده از روش بافر مقایسه کرد. کیوری [ 14] نیاز به روشهای عینی را برای ارزیابی، نمایش و انتقال عدم قطعیت در دادههای برداری از طریق محاسبات نشان میدهد تا تصمیمگیرندگان ایدهای از قابلیت اطمینان اطلاعات داشته باشند. دقت موقعیت را می توان به دو کلاس مطلق و نسبی تقسیم کرد [ 15 ]، که در آن دقت موقعیتی نسبی، سازگاری هر موقعیت روی نقشه را با توجه به هر موقعیت دیگری توصیف می کند و دقت مطلق معیاری برای انحراف یک تخمین از مقدار واقعی است [ 15]. 16 ].
تحقیقات کیفیت دادههای مکانی با اذعان به اینکه دادههای ذخیرهشده در یک پایگاه داده جغرافیایی به ندرت، و یا هرگز، واقعاً عاری از خطا هستند و پایگاه داده حاوی تقریبی از دنیای واقعی است [ 17 ] آغاز میشود. Doucette و همکاران [ 18 ] نشان می دهد که مدیریت عدم قطعیت مربوط به هر فعالیت علمی است که شامل اندازه گیری پدیده های دنیای واقعی است. مطالعاتی برای توصیف دقت موقعیتی پایگاههای داده برداری جغرافیایی انجام شده است که در آن یک مجموعه داده آزمایشی با مجموعه دادههای حقیقت با دقت موقعیتی بالاتر مقایسه میشود [ 19 , 20 , 21 , 22 , 23]. در حالی که مطالعات دیگر یک مجموعه داده برداری آزمایشی را با مکانهای GPS [ 24 ، 25 ] و موقعیتهای تعیینشده از تصویر ارتویماتور جغرافیایی [ 26 ] مقایسه کردند.
هاکلی [ 21 ، 27 ] مقالات شاخصی در مورد پروژه OSM و تعیین دقت موقعیت بخشی از پایگاه داده در لندن، انگلستان ارائه کرده است. خطوط مرکزی جاده از OSM با مکان متناظر آنها در بررسی مقررات بریتانیا (OS) با استفاده از روش بافر مقایسه میشوند. نتایج دقت های موقعیتی را از 3.17 متر تا 8.33 متر با میانگین اختلاف در 5.8 متر نشان می دهد.
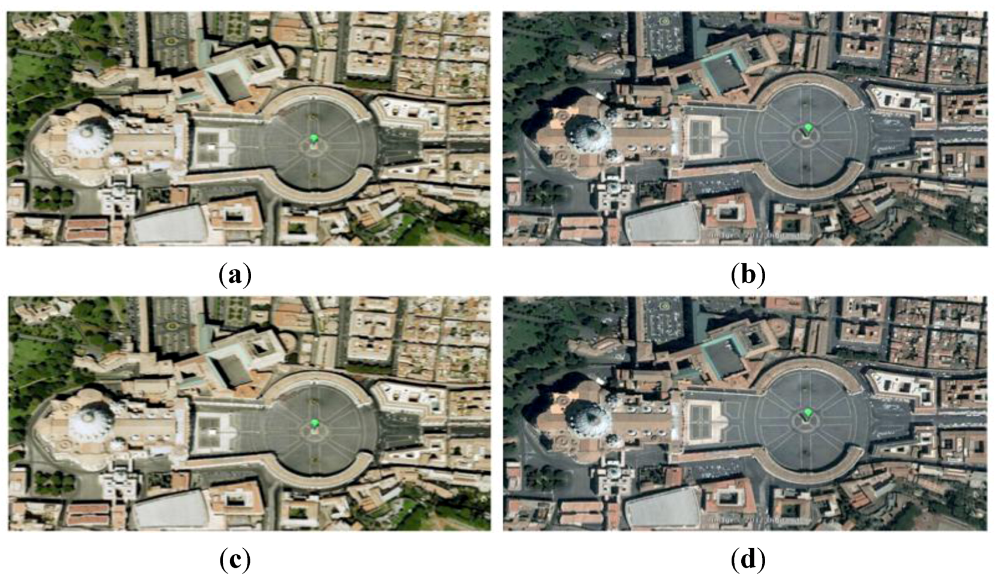
یکی از متداولترین راهها برای ساخت مجموعه دادههای برداری، دیجیتالی کردن، ردیابی یا بردار کردن یک تصویر هوایی شطرنجی (هم پلتفرمهای ماهوارهای و هم مبتنی بر هوابرد) است. از آنجایی که ویژگیهای برداری حاصل، قاب مرجع مختصات تصویر هوایی را میگیرند، اطمینان از اینکه تصاویر به درستی ارجاع جغرافیایی داده میشوند، مهم است. در حالی که روشهای پردازش تصویر میتوانند به طور معمول محصولات جغرافیایی را با دقت 2 متر (CE90) برای محصولات مبتنی بر ماهواره [ 28 ] و 0.30 متر (RMSE افقی) برای محصولات مبتنی بر هوایی [ 29 ] ارائه دهند، مهم است که در نظر داشته باشید که تکنیک های مختلف فرآوری محصولاتی را با درجات مختلف دقت تولید می کنند. این در شکل 1 آشکار است ، که مکانی را در Google Earth © 2007 نشان می دهد.تصویر [ 30 ] در مقایسه با همان مکان در تصاویر بایگانی شده قدیمی تر. نتایج نشان می دهد که تفاوت موقعیت از 5 تا 24 متر است.
شکل 1. تصاویر آرشیو شده Google Earth © از میدان سنت پیترز، شهر واتیکان. ( الف ) تصویر مرجع 2007; ( ب ) تصویر 2005 5 متر متفاوت; ( ج ) تصویر 2004 24 متر متفاوت; ( د ) تصویر 2002 19 متر متفاوت.
زمین آمار را می توان برای پیش بینی ویژگی های نمونه برداری شده در مکان های نمونه برداری نشده از داده های پراکنده و اغلب گران استفاده کرد [ 31 ]. بارو [ 31 ] دو موضوع را تعریف می کند که تحقیقات زمین آماری می تواند به حل آنها کمک کند: (1) خطاهای درونیابی و (2) انتشار خطا در مدل های فضایی. از زمانی که دقت پایگاه داده مکانی به عنوان یک ابتکار تحقیقاتی در مرکز ملی اطلاعات جغرافیایی و تجزیه و تحلیل [ 32 ] ایالات متحده شناسایی شد، تلاشی برای بررسی جنبه های مختلف دقت در پایگاه داده های فضایی [ 33 ، 34 ، 35 ، 36 ، 37 ] انجام شد. شی و همکاران [ 38] با ارائه یک مدل S-Band برای توصیف ویژگیهای عدم قطعیت موقعیت ویژگیهای هندسی، مانند بخشهای خط، ویژگیهای خط، خطوط مرزی و ویژگیهای ناحیه، به موضوع کمک میکند. با این حال، یک فرض کلیدی این است که خطاهای اندازه گیری مستقل و نامرتبط هستند. برای پرداختن به این موضوع، شی و لیو [ 39 ] یک مدل G-Band را توسعه دادند که اندازه گیری های همبسته را مدیریت می کند. عشق و همکاران [ 40 ] مفهوم G-Band را با یک مدل بیزی برای ترکیب دانش تخصصی و تاریخی که تعداد مشاهدات مورد نیاز برای تحلیل خطای دقیق داده های برداری را کاهش می دهد، گسترش می دهد.
حتی اگر کار بر روی موضوع تعیین دقت فضایی مجموعه دادههای برداری انجام شده است، ادبیات کنونی در تحلیل دقت موقعیت با استفاده از تکنیکهای فتوگرامتری تحلیلی، مانند تنظیم بسته، کوتاهی میکند. فتوگرامتری به طور سنتی برای: (1) تعیین مختصات فضایی سه بعدی جهان واقعی از تصاویر استریو استفاده میشود. (2) خطای موجود در سیستم تصویربرداری حسگر را به یک مکان زمینی انتشار دهید. (3) سطوح سه بعدی زمین، مانند مدل های ارتفاعی دیجیتال را استخراج کنید. یا (4) GCPهای بسیار دقیق را به نوارها یا بلوک های تصویر مجاور گسترش دهید تا نقشه برداری دقیق زمین و زیرساخت از تصاویر هوایی را تسهیل کند. از این رو،
3. روش شناسی
3.1. مفهوم تنظیم برداری
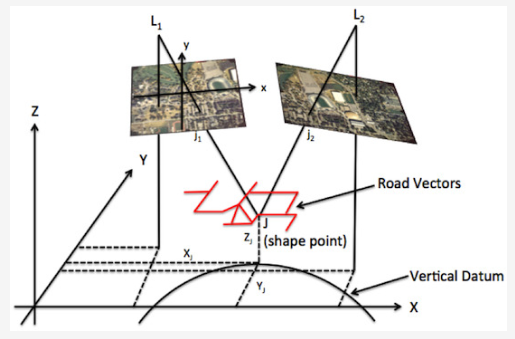
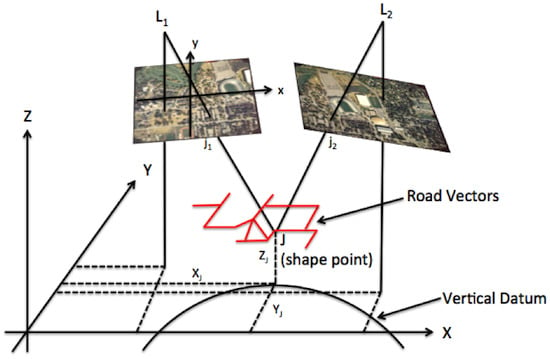
مدل تنظیم برداری که برای تعیین دقت موقعیت بردارهای جاده استفاده می شود، بر اساس مدل تنظیم بسته نرم افزاری فتوگرامتری ساخته شده است و برای شامل نقاط شکل برداری به عنوان نقاط شی گسترش می یابد. از آنجایی که نقاط شی به صورت سه بعدی بیان می شوند، ارتفاعات برای نقاط شکل با استفاده از یک مدل ارتفاعی دیجیتالی شطرنجی دوم قوس 1/3 (DEM) که در ناحیه مورد نظر از مجموعه داده های ارتفاعی ملی USGS (NED) به دست آمده است [ 41 ] تخمین زده می شود.]. برای این تحقیق، ویژگی های جاده از پایگاه داده OSM و GCPهای بررسی شده به عنوان نقاط شی در تنظیم برای تعیین دقت موقعیتی نقاط شکل برداری استفاده شد. ایده کلی استفاده از GCPهای سنگین وزن (معروف) و مختصات تصویر برای ایجاد ایستگاه نوردهی حسگر و اجرای مفهوم هم خطی برای حل مکان واقعی نقاط شکل OSM است. باقیمانده های تنظیم سپس تفاوت بین مکان تنظیم شده (“درست”) و موقعیت پایگاه داده OSM را توصیف می کنند. علاوه بر این، از آنجایی که این یک برنامه دقیق است، جایی که عدم قطعیت در GCP، مختصات تصویر، و نقاط شی مشخص است، انتشار خطا برای محاسبه مناطق اطمینان در مورد مکانهای نقطه شکل تنظیم شده (CE90 و LE90) استفاده میشود. مفهوم کلی در شکل 2 نشان داده شده است.
شکل 2. نمودار شماتیک مفهوم تنظیم برداری.
در شکل 2 SPنشان دهنده نقاط شکل OSM از پایگاه داده جغرافیایی است که یک بردار جاده خاص را تشکیل می دهد که در حال آزمایش است. مختصات تصویر نقاط شکل OSM بر روی هر تصویر استریو اندازه گیری می شود و به عنوان ورودی مدل تنظیم استفاده می شود. مختصات تصویر به خوبی شناخته شده (با وزن زیاد) در نظر گرفته می شوند و در نهایت موقعیت نقطه شکل تنظیم شده را در فضای زمین کنترل می کنند. فرض در اینجا این است که تصاویر به عنوان “حقیقت” در نظر گرفته می شوند، یا به روزتر یا دارای اهمیت بالاتر از مکان پایگاه داده OSM. علاوه بر این، تقریبهای اولیه برای پارامترهای جهت بیرونی (EO) برای تسهیل فرآیند تنظیم ارائه شده است، توجه داشته باشید که پارامترهای EO در تنظیم حل شدهاند، بنابراین برآورد اولیه تنها چیزی است که لازم است.
GCPهای معروف (با وزن زیاد) کنترل مطلق برای تنظیم در نظر گرفته می شوند. GCPها در تصویر اندازه گیری می شوند و با مختصات فضای زمین در تنظیم استفاده می شوند. از آنجایی که GCPها برای فرموله کردن مدل استریو تحلیلی و ایجاد رابطه تصویر به زمین استفاده می شوند، مهم است که با درجه بالایی از دقت شناخته شوند. علاوه بر این، ضروری است که نقاط شکل GCP و OSM به همان پیشبینی نقشه افقی/عمودی ارجاع داده شوند تا هرگونه ناهماهنگی که در غیر این صورت حذف میشود به حداقل برسد.
خروجی های تنظیم برداری عبارتند از: (1) مکان های نقطه شکل OSM تنظیم شده، (2) باقیمانده های تنظیم نقطه شکل (که دقت موقعیت را توصیف می کنند)، و (3) مناطق اطمینان در مورد مکان های نقطه شکل تنظیم شده (CE90/LE90).
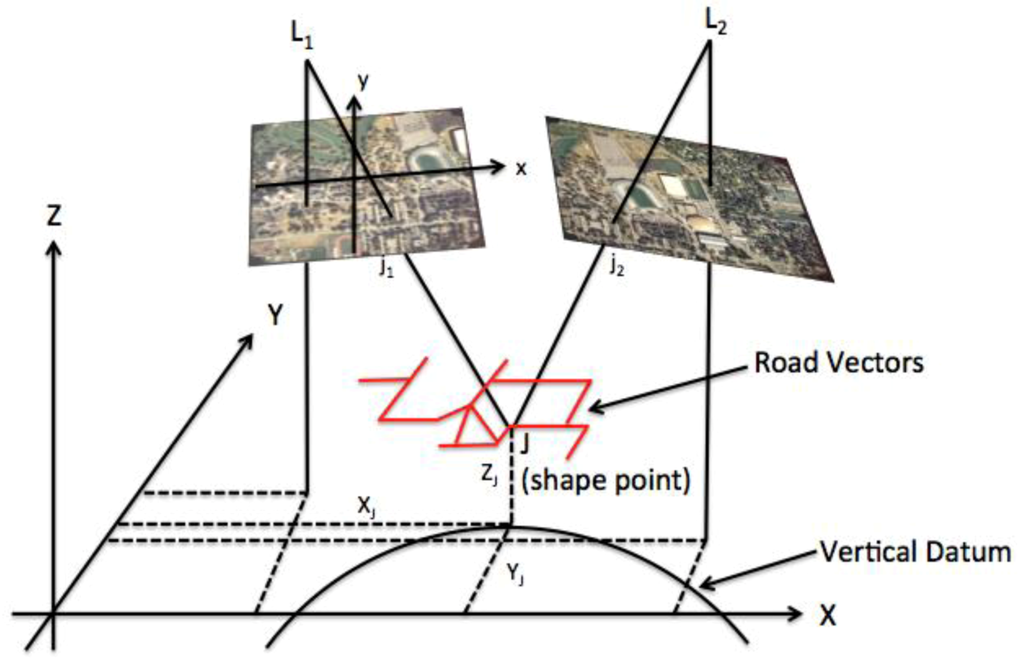
رابطه بین تصاویر استریو و یک نقطه شکل OSM گسترشی برای مشکل برداشتن فضا است [ 42 ، 43 ]. مدل هندسی را می توان در شکل 3 مشاهده کرد.
شکل 3. نمودار هندسی مفهوم تنظیم برداری.
که در آن، L 1 و L 2 مختصات ایستگاه نوردهی برای تصویر استریو یک و دو هستند و j 1 و j 2 مختصات تصویر نقطه شکل OSM، J ، در تصاویر یک و دو اندازه گیری می شوند. برای این کار، اندازه گیری مختصات تصویر به صورت دستی انجام شد، یعنی، یک کاربر هر نقطه شکل را در تصاویر استریو اندازه می گیرد. با این حال، پیشبینی میشود که این فرآیند میتواند با ترکیب فرآیند ثبت تصویر به برداری خودکار شود. هنگامی که مختصات فضای تصویر و شی تخمین زده می شود، می توان از آنها به عنوان تقریب اولیه در مدل تنظیم بسته استفاده کرد. شرط همخطی، که بیان می کند که ایستگاه نوردهی ( ،، ) ، یک شیء به مکان مشتق شده از تصویر اشاره می کند ( xj ، y j ) ، و نقطه جسم در فضای زمین ( X J ، Y J ، Z J ) همه روی یک قرار دارند. یک خط برای تشکیل معادلات مشاهده در تنظیم بسته استفاده می شود. 
3.2. تنظیم بسته نرم افزاری فتوگرامتری
واحد هندسی اساسی در فتوگرامتری پرتو تصویر است، یک تصویر را می توان به عنوان دسته ای از پرتوها در نظر گرفت که در مرکز پرسپکتیو با موقعیت و جهت ناشناخته در فضا همگرا می شوند [ 42 ]. بستههای همه عکسها به طور همزمان تنظیم میشوند تا پرتوهای نور مربوطه از مختصات تصویر اندازهگیری شده در موقعیتهای نقاط جسم روی زمین قطع شوند. کمیت های ناشناخته ای که از تنظیم بسته به دست می آیند شامل مختصات شی تنظیم شده نقاط شکل برداری و GCPها ( X J , Y J , Z J ) و پارامترهای EO ( ω , φ , κ , , , ) از تمام تصاویر. پارامترهای EO مختصات ایستگاه نوردهی ( , , ) و پارامترهای جهت گیری تصویر ( ω , φ , κ ) را توصیف می کنند که در معادلات همخطی برای فرمول بندی رابطه تصویر به زمین استفاده می شود.
عبارتهای ماتریس چرخش نتیجه چرخشهای فردی ω ، φ و κ هستند که به ترتیب به چرخشهای حول محورهای x ، y و z اعمال میشوند . ساختار ماتریسهای چرخش فردی به صورت زیر است:
با ماتریس چرخش کل، نتیجه ترکیب چرخش های فردی به شرح زیر است:
از آنجایی که معادلات همخطی غیرخطی هستند، آنها با اعمال عبارت های مرتبه اول سری تیلور در مجموعه ای از تقریب های اولیه خطی می شوند، یک مشتق دقیق در [ 43 ] ارائه شده است.
ماتریس های استفاده شده در مدل حداقل مربعات به صورت زیر ساخته شده اند، برای ساده سازی ماتریس ها برای یک تصویر منفرد i و نقطه شی j نشان داده شده اند . ماتریسها و از عبارتهای حاصل از خطیسازی معادلات همخطی در [ 43 ] ساخته شدهاند.
ماتریس به صورت :
بردار به صورت :
بردار به صورت :
بردار ε ij با اصطلاحات بسط سری تیلور در [ 43 ] به صورت زیر فرموله شده است:
و بردار V ij به صورت زیر است:
و، باقیمانده برای نقطه شی j بیان شده در هر جزء.
و ماتریس Δ ترکیبی از اصلاحات پارامترهای جهت گیری بیرونی و اصلاحات مختصات نقطه شی است که اندازه آن با تعداد تصاویر و نقاط شی در تنظیم تعیین می شود.
به طور مشابه، ماتریس K به صورت زیر ساخته شده است:
زیر ماتریس های استفاده شده در بالا به صورت زیر تعریف می شوند:
با m تعداد تصاویر، n تعداد نقاط شی، i زیرنویس تصویر، و j زیرنویس نقطه شی است. اگر نقطه j در تصویر i ظاهر نشود ، از یک زیرماتریس صفر استفاده می شود. هنگامی که معادلات نرمال در حال شکل گیری هستند، توصیه می شود که پسینی محاسبه شودواریانس مرجع، که یک واحد کمیت اسکالر کمتر است که عدم قطعیت یافت شده در مشاهدات پس از تعدیل را توصیف می کند. این تابعی از ماتریس های وزنی مختلف (دقت مختصات تصویر، دقت پارامتر EO و دقت نقطه شی) است که به اشتباه معادلات همخطی و مشاهده نقطه شی منتشر می شود. خطای استاندارد پسینی وزن واحد را می توان به صورت زیر محاسبه کرد:
که در آن no تعداد کل مشاهدات و nu تعداد کل مجهولات در مدل تعدیل است. هنگامی که راه حل همگرا شد، معادلات نرمال با واریانس مرجع پسینی مقیاس بندی می شوند تا ماتریس کوواریانس واریانس نهایی برای پارامترهای قابل تنظیم به صورت زیر محاسبه شود:
که در آن ماتریس بهدستآمده مورب بلوک با واریانسهای پارامترهای جهتگیری بیرونی است و نقطه شی مطابق با نحوه تشکیل ماتریس N است. انحراف استاندارد پارامترهای تعدیل با گرفتن جذر واریانس قطری محاسبه می شود.
3.3. تنظیم وزن
مفهوم وزن در تعدیل برداری بسیار مهم است و به طور مستقیم بر مقادیر تعدیل شده و همچنین عدم قطعیت تخمینی نقاط تعدیل شده تأثیر می گذارد. وزن تنظیم شامل تخصیص یک مقدار عددی به مشاهدات و پارامترهای تنظیم بر اساس میزان مشخص بودن کمیت خاص است. وزنها برای هر دو تعیین میشوند: (1) نقاط تصویر، بر اساس یک برآورد پیشینی از میزان اندازهگیری نقاط در تصویر، و (2) مختصات نقطه شی، که شامل GCP و دقت نقطه شکل برداری است. .
ایده کلی این است که هر چه کاربر اطمینان بیشتری در اندازه گیری داشته باشد، انحراف استاندارد کمتری به آن اندازه گیری اختصاص داده می شود. به عنوان مثال، GCPهای مورد استفاده در این مطالعه با بررسی GPS ایجاد شده اند، بنابراین دقت های اختصاص داده شده به این مختصات بسیار کوچک، در حد 10 سانتی متر یا کمتر از سه بعدی است. می توان دلیل کرد که یک انحراف استاندارد کوچک با اعتماد بالای کاربر به مقدار عددی اندازه گیری مطابقت دارد. از سوی دیگر، مختصات نقطه شکل برداری با روشهای سختگیرانه کمتر تعیین شد. مانند اندازه گیری یک تصویر ماهواره ای یا با گیرنده GPS دستی. در این مورد مختصات بسیار کمتر شناخته شده هستند، به عنوان مثال، یک کاربر به دقت نقطه اعتماد کمتری دارد، بنابراین یک انحراف استاندارد به ترتیب چند متر یا بیشتر می تواند واقع بینانه باشد.
در اغلب موارد دقت نقاط شکل OSM از قبل مشخص نخواهد شد ، بنابراین رویکرد زیر را می توان برای تخمین آنها پیاده سازی کرد. ابتدا یک انحراف استاندارد بزرگ دلخواه را به نقاط شکل OSM اختصاص دهید. دوم، تنظیمی را برای تعیین باقیمانده های نقطه شکل اجرا کنید و RMSE باقیمانده های نقطه شکل را برای تخمین جابجایی موقعیت محاسبه کنید. ثالثاً، از مقدار RMSE و باقیماندهها برای تخمین انحرافات استاندارد پیشینی برای نقاط شکل OSM استفاده کنید. در نهایت، تنظیم را مجدداً برای محاسبه اطلاعات تنظیم شده دقیق اجرا کنید.
3.4. دقت مطلق
دقت اصطلاحی است که به نزدیکی بین اندازه گیری ها و مقادیر واقعی آنها اشاره دارد [ 44 ]. هرچه اندازهگیری به مقدار واقعی نزدیکتر باشد، دقت اندازهگیری بهتر است. در واقع، مقدار واقعی مشخص نیست و تنها با انجام اندازه گیری ها و تجزیه و تحلیل آن اندازه گیری ها می توان آن را تخمین زد. بنابراین، مقدار واقعی اغلب به عنوان مقدار مورد انتظار نامیده می شود و می توان آن را با محاسبه میانگین یا میانگین زیر مجموعه ای از اندازه گیری ها اندازه گیری کرد. علاوه بر این، اندازهگیریها به خودی خود کمیتهای کامل نیستند و در معرض خطاهای ناشی از افرادی که اندازهگیری میکنند، تجهیزات مورد استفاده برای اندازهگیری، و نویز تصادفی در خود اندازهگیریها، هستند.
آمار دقت محصول پراکندگی خطاهای فردی مجموعه بزرگی از پست های بازرسی را خلاصه می کند. جامعه نظامی به یک آمار دقیق نیاز دارد که سوگیری ها و خطاهای تصادفی را ترکیب کرده و سپس آنها را در سطح احتمال 90 درصد تخمین بزند. دقت عمودی به عنوان یک خطای خطی (LE) گزارش می شود زیرا یک عدم قطعیت در امتداد دقت عمودی منفرد است. دقت افقی تابعی از دو بعد افقی در جهت x و y است. می توان آن را یک خطای دایره ای (CE) در نظر گرفت، که به شعاع دایره، در مرکز مکان مشتق شده، که در آن مکان واقعی یا مورد انتظار نقاط قرار دارد، اشاره دارد [ 45 ]. Ager CE90 و LE90 را به تفصیل در [ 45 ] استخراج می کند، بنابراین خواننده برای اطلاعات بیشتر به اینجا ارجاع داده می شود.
ریشه میانگین مربعات خطا (RMSE)
ریشه میانگین مربعات خطا (RMSE) به عنوان ریشه دوم اختلاف مجذور میانگین در مقادیر مختصات [ 6 ] تعریف می شود. RMSE از میانگین مربعات خطا (MSE) در اجزای مختلف x ، y و z تشکیل شده است. MSE مقداری است که مجموع مجذور تفاوتهای یک مقدار اندازهگیری شده و مقدار واقعی آن را اندازهگیری میکند و در [ 44 ] به صورت زیر تعریف میشود:
که در آن x مقدار اندازه گیری شده، t مقدار صدق و n تعداد اندازه گیری ها است. در واقعیت، ارزش صدق به ندرت شناخته می شود، بنابراین این کار به دنبال جایگزینی حقیقت با بهترین برآورد ارزش اندازه گیری شده است. به عنوان مثال، نقاط کنترل زمینی تعیین شده توسط GPS مورد استفاده در تنظیم بسته، حقیقت در نظر گرفته می شوند، در حالی که مقادیر آنها در واقع با اندازه گیری با عدم قطعیت ذاتی تعیین می شود. با این حال، موقعیت ها بهترین برآورد از حقیقت هستند و به این ترتیب مورد استفاده قرار خواهند گرفت. سپس با گرفتن جذر MSE در جهات x و y می توان خطای موقعیتی ریشه میانگین مربع را تعریف کرد.
سپس می توان از آمار RMSE برای توصیف عدم قطعیت موجود در مجموعه ای از اندازه گیری های مشابه استفاده کرد.
4. نتایج تجربی و تجزیه و تحلیل
نتایج تجربی ارائه شده در اینجا به منظور آزمایش دقت مدل تنظیم بردار پیشنهادی و اینکه چقدر جابجایی موقعیتی واقعی موجود در بردارهای ورودی را بازیابی میکند، میباشد. نقاط شکل از پایگاه داده OSM، همراه با تصاویر استریو هوایی، DEM دوم قوس USGS 1/3 و GCP به عنوان ورودی به مدل تنظیم برداری استفاده خواهد شد. دقت موقعیت با مقایسه تفاوت های مختصات نقطه شکل پایگاه داده OSM و مکان نقطه شکل تنظیم شده با مکان واقعی زمین بررسی شده (حقیقت زمین) اندازه گیری می شود. به عنوان مثال، تفاوت بین پایگاه داده OSM و مکان بررسی شده نشان دهنده جابجایی موقعیتی واقعی موجود در نقطه شکل است. به همین ترتیب، اندازه گیری تفاوت بین نقطه شکل تنظیم شده و مکان بررسی شده، دقت خود تنظیم را توصیف می کند. علاوه بر این، مقایسه باقیماندههای تنظیم با آنهایی که از حقیقت زمین تعیین میشوند، معیاری از عملکرد را برای اینکه مدل تنظیم برداری چقدر جابجایی موقعیت واقعی را بازیابی میکند، ارائه میدهد. روال تنظیم بسته نرم افزاری در SOCET GXP© (نسخه 3.2) نرم افزار فتوگرامتری و بهره برداری جغرافیایی توسط BAE Systems Corporation برای تسهیل تست تنظیم استفاده شد، در حالی که متریک RMSE برای تعیین کمیت نتایج استفاده شد.
4.1. مجموعه داده های پروژه
تصاویر هوایی مورد استفاده برای این پروژه، تصاویر استریو قاب هوایی است که با دوربین (حسگر) عکاسی هوایی لایکا (وحشی) RC10 در محوطه دانشگاه پردو در وست لافایت، ایندیانا در 5 اکتبر 1999 گرفته شده است. تصاویر به فرمت دیجیتال اسکن شده اند و دارای مقیاس 1:4000 یا 1″ = 100 متر با فاصله نمونه زمینی 12 سانتی متری (GSD). ارتفاع هواپیما 610 متر از سطح زمین یا 798 متر بالاتر از سطح آب بندی متوسط بود و به گونه ای جمع آوری شد که 80٪ به جلو را شامل شود. همپوشانی و 60 درصد همپوشانی جانبی سنسور توسط USGS کالیبره شده است و شامل گزارش کالیبراسیون دوربین است که برای جهت گیری داخلی استفاده می شود و حاوی اطلاعاتی مانند فاصله کانونی کالیبره شده (152.4 میلی متر)، پارامترهای اعوجاج لنز، و علائم فیدوشیال کالیبره شده است.هیچ داده ای از سیستم ناوبری اینرسی (INS) در طول اکتساب تصاویر جمع آوری نشد.
DEM برای تخمین تقریب های اولیه برای ارتفاعات نقطه شکل استفاده می شود و از یک DEM شطرنجی 1/3 ثانیه (حدود 10 متر) در قالب GeoTiff تشکیل شده است [ 41 ].]. NED محصول داده های ارتفاعی اولیه USGS است و یک مجموعه داده یکپارچه با بهترین داده های ارتفاعی شطرنجی موجود در ایالات متحده، آلاسکا، هاوایی و جزایر سرزمینی است. NED از دادههای منبع متنوعی مشتق میشود که به یک سیستم مختصات مشترک و واحد اندازهگیری عمودی پردازش میشوند، مختصات جغرافیایی در واحدهای درجه اعشار، و مطابق با داده آمریکای شمالی در سال 1983 (NAD 83). همه مقادیر ارتفاع بر حسب متر هستند و در سراسر ایالات متحده به داده عمودی آمریکای شمالی در سال 1988 (NAVD 88) ارجاع داده شده است. داده های NED در سطح ملی (به جز آلاسکا) با وضوح 1 ثانیه قوس (حدود 30 متر) و 1/3 ثانیه قوس (حدود 10 متر) و در مناطق محدود در 1/9 ثانیه قوس (حدود 3 متر) در دسترس هستند. ) [ 41]. دقت لازم برای اطمینان از تبدیل مناسب بین داده های NAD 83 و WGS 84 در هنگام کار با مجموعه داده انجام شد.
مجموعه داده حقیقت با مکان یابی بردارهای آزمون موضوع (خطوط مرکزی جاده) با تکنیک های نقشه برداری GPS مرتبه بالا تعیین شد. کمپین نظرسنجی میدانی در جولای 2012 در محوطه دانشگاه پردو انجام شد. هدف از این نظرسنجی تعیین موقعیتهای واقعی واقعی خطوط مرکزی جادهای بود که در حال آزمایش هستند، و همچنین ایجاد GCP برای تسهیل آزمایش. تجهیزات GPS مورد استفاده یک سیستم Leica Viva RTK بود و شامل یک گیرنده GPS (مریخ نورد) بود که از طریق یک مودم داده دیجیتال به ایستگاه مرجع دائمی عملیات INWL (ایستگاه مبنا CORS) به اداره حمل و نقل ایندیانا (INDOT) متصل می شد. این نوع راهاندازی به کاربر امکان میدهد مستقیماً به یک نقطه کنترلی با دقت بسیار بالا وصل شود و مختصات درجه نظرسنجی تنظیمشده را در مریخنورد در زمان واقعی دریافت کند.
4.2. سناریوی خیابان های شهر شهری OSM
سناریوی خیابان های شهر به منظور آزمایش جاده های شهری در پایگاه داده OSM برای دقت موقعیت با اندازه گیری تقاطع بردارهای خیابان شبکه ای است. این سناریو در نزدیکی مرکز پردیس قرار دارد و بلوک های دو مربعی (1 بلوک = 100 ± متر) را در امتداد خیابان های 3، 4، 5، راسل، والدرون و دانشگاه پوشش می دهد. بردارهای تنظیم شده با رویکرد پیشنهادی مشتق شدهاند و میتوانند در شکل 4 تجسم شوند ، که در آن بردارهای پایگاه داده اصلی OSM به رنگ سبز و بردارهای تنظیم شده به رنگ آبی هستند.
تصاویر پایه با نقاط کنترل زمینی بررسیشده ارجاع داده شدهاند، بنابراین میتوان یک رابطه مکانی دقیق بین دادههای برداری و دنیای واقعی اطراف که در تصاویر نشان داده شده است ترسیم کرد. نمای نزدیک از دو ناحیه در شکل 5 و شکل 6 ارائه شده است.
بازرسی بصری نشان می دهد که بردارهای تنظیم شده در مقایسه با بردارهای اصلی پایگاه داده OSM، با خط مرکزی جاده در تصاویر مطابقت بیشتری دارند. مختصات نقاط شکل تنظیم شده و اطمینان آماری در جدول 1 نشان داده شده است.
شکل 4. OpenStreetMap © (OSM) (سبز) و بردارهای جاده تنظیم شده (آبی).
جدول 1. اطلاعات نقطه شکل تنظیم شده.
در آنجا، از سه GCP برای تنظیم نقاط شکل برداری استفاده شد و دارای انحراف استاندارد پیشینی 2 سانتی متر در جهت x ، 2 سانتی متر در جهت y و 1 سانتی متر در جهت z بود. برای اطلاعات بیشتر در مورد حداقل تعداد و پیکربندی GCPهای مورد نیاز برای تولید نتایج تنظیم قابل اعتماد ، خواننده به [ 46 ] ارجاع داده می شود. انحرافات استاندارد پیشینی برای نقاط شکل OSM به ترتیب در 2، 3 و 0.20 متر در جهت های x ، y و z به طور قابل توجهی بالاتر بود. واریانس مرجع پسینی برای این تعدیل 0.89 بود که نشان دهنده این استوزن های پیشینی با عدم قطعیت یافت شده در مشاهدات پس از تعدیل سازگار است. باقیمانده های تعدیل در جدول 2 خلاصه شده است.
جدول 2. باقیمانده های تنظیم.
باقیماندهها نشان میدهند که نقطه شکل OSM باید به کدام سمت حرکت کند تا از نظر موقعیتی دقیقتر شود، با مقدار مثبت نقطه حرکت در جهت شرق ( Vx ) و شمال ( Vy ). جالب است که باقیمانده های عمودی اساساً صفر هستند، که نشان دهنده هیچ تغییری از بین تقریب اولیه (DEM) و ارتفاعات نقطه شکل تنظیم شده است. به طور کلی، قابل تصور است زیرا DEM با روش های فتوگرامتری تولید شده و به مبدأ NAVD88 گره خورده است. به طور مشابه، GCPهای مورد استفاده به عنوان چارچوب مرجع برای این پروژه نیز به داده NAVD88 گره خوردند. علاوه بر این، تقاطعها دارای سطوح آسفالتشده نسبتاً مسطح و وسیع هستند که در نتیجه دقت DEM در این مناطق افزایش مییابد. با این حال، LE90 از جدول 1 را در نظر داشته باشیدبرای این نقاط 0.20 متر است. برای بررسی بیشتر نتایج با حقیقت زمینی بررسی شده در جدول 3 مقایسه شده است.
دلتاهای تنظیم نشده به نقطه شکل OSM منهای مقدار مختصات صدق اشاره دارد، در حالی که اطلاعات تنظیم شده به مختصات نقطه شکل تنظیم شده منهای حقیقت زمین اشاره دارد. این نوع مقایسه جابجایی موقعیتی واقعی جاده ها (تنظیم نشده) و آنچه پس از تنظیم باقی می ماند را نشان می دهد. نتایج بهبود 86% · (100 – 0.69/4.81) در دقت موقعیتی (RMSE) پس از تنظیم را نشان می دهد. علاوه بر این، تنظیم برداری توانست 95% · (4.81/5.04) از جابجایی واقعی موجود در نقاط شکل جاده را بازیابی کند. نتایج همچنین نشان میدهد که دو نقطه (OSM 137 و 28) در نتیجه تنظیم، در واقع کمی از حقیقت دورتر شدهاند، با این حال باید به خاطر داشت که مقادیر صدق با تخمین مرکز یک تقاطع گسترده جاده غیر توصیفی تعیین شد. با ترافیک، اندازه گیری مرکز دقیق جاده ها را دشوار می کند. بنابراین، ممکن است موقعیتهای تنظیمشده نزدیکتر از آنچه دلتاها در ابتدا پیشنهاد میکنند، به حقیقت نزدیکتر باشند، بهویژه زمانی که CE90 دو نقطه شکل را به ترتیب در 13 و 16 سانتیمتر در نظر میگیریم.
حقیقت زمینی مورد بررسی در ژوئیه 2012 مشخص شد، در حالی که تصاویر در اوایل سال 1999 به نمایش درآمدند. چالش در اینجا به حساب آوردن ساخت و سازهایی بود که در 12+ سال در این بین انجام شد. برای مثال، بدیهی است که جاده های مرتبط با نقاط شکل OSM 557-573 توسط روسازی با ظاهر جدیدتر بازسازی شده اند، و ممکن است تغییر درجه مربوط به پروژه بازسازی وجود داشته باشد که می تواند تفاوت های ارتفاعی بزرگتر را که در آن مشاهده می شود، توضیح دهد. این نکات
یک بررسی اضافی برای اطمینان از اینکه تنظیم نتایج قابل اعتماد تولید می کند، اجرا شد. چندین GCP فقط به عنوان “نقاط چک” در تنظیم گنجانده شده است. نقاط چک بر نتیجه تعدیل تأثیر نمیگذارند، بلکه با استفاده از رابطه مدل به زمین محاسبه شده، حمل شده و قرار میگیرند. هدف این است که نقاط شناخته شده ای داشته باشیم که بتوان از طریق فرآیند تعدیل انجام داد تا عملکرد تنظیم برداری را تأیید کند. جدول 4 شامل تفاوت بین مختصات تنظیم شده نقاط چک و مختصات حقیقت اندازه گیری شده با GPS است.
جدول 4. مقایسه نقاط بررسی.
نتایج جدول 4 RMSE نقاط چک را 15 سانتی متر نشان می دهد که با میانگین CE90 نقاط شکل برداری در 14 سانتی متر مطابقت دارد. این معیار دیگری است که اطمینان را در موقعیت های نقطه شکل تنظیم شده در جدول 1 فراهم می کند .
4.3. ویژگی های ویژگی
پیادهسازی رویکرد پیشنهادی، بردار جاده تنظیمشدهای را فراهم میکند که به حقیقت نزدیک است، همانطور که از تحلیل سناریوی بالا نشان داده شد. بردار حقیقت مکانی را نشان میدهد که از نظر مکانی دقیق است، به معنای مطلق، در رابطه با ویژگیهای واقعی روی زمین، زیرا با تکنیکهای نقشهبرداری ژئودتیکی مرتبه بالا (RTK GPS از CORS) توسط یک نقشهبر حرفهای مجاز به دست آمده است. بنابراین، از آنجایی که موقعیت تنظیم شده بردار جاده نزدیک به بردار حقیقت است، می توان آن را “دقیق موقعیت” در نظر گرفت. پس از محاسبه این اطلاعات ارزشمند، منطقی است که آن را در سطح ویژگی در آینده ذخیره کنید تا کاربر بتواند به راحتی به اطلاعات دسترسی داشته باشد و از آن برای کمک به تصمیم گیری آگاهانه تر در مورد داده هایی که با آنها کار می کند، استفاده کند.
ویژگی سطح ویژگی به ذخیره اطلاعات مربوط به یک ویژگی هندسی منفرد در یک پایگاه داده جغرافیایی اشاره دارد، به عنوان مثال، ثبت باقیمانده های تنظیم نقطه شکل یا مقدار RMSE چند خط، که هر دو دقت موقعیتی آنها را توصیف می کند. ویژگی های مثال برای یک نقطه شکل در جدول 5 با اطلاعات تنظیم شده به صورت مورب دیده می شود.
جدول 5. ویژگی های نقطه شکل.
4.4. ارزیابی دقت سر به سر جاده های OSM، TNM و TIGER 07
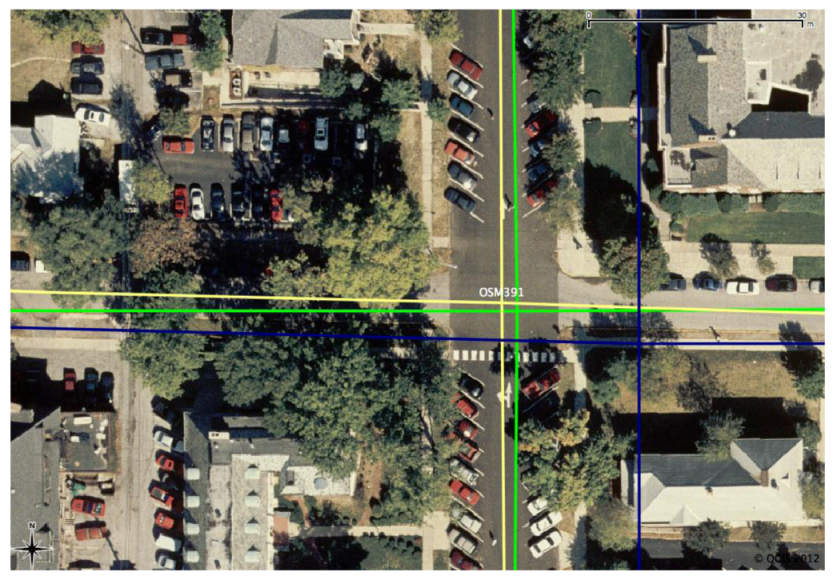
ارزیابی دقت سر به سر OSM، نقشه ملی USGS (TNM) و جادههای TIGER 07 به منظور نشان دادن کاربرد عملی مدل تنظیم بردار پیشنهادی است. برنامه های بسیاری وجود دارند که می توانند از دانستن دقت موقعیتی نقاط شکل و بردارها در یک پایگاه داده جغرافیایی سود ببرند، به عنوان مثال، ناوبری GPS، مشکلات اختلاط بردار به برداری، برنامه ریزی عملیاتی، و قابلیت تصمیم گیری بهبود یافته فقط به نام چند. در این مثال، خطوط مرکزی جاده برداری و نقاط شکل از هر پایگاه داده برای همان مکان مورد استفاده در سناریوی خیابان های شهر شهری بالا استخراج شد. دقت انجام شد تا اطمینان حاصل شود که مجموعه دادهها به ترتیب به همان داده افقی و عمودی، WGS84 و NAVD88 ارجاع داده شدهاند. هر مجموعه داده به طور مستقل با استفاده از همان GCP با همان تنظیم شدانحرافات استاندارد پیشینی (5 سانتی متر در x/y و 8 سانتی متر در ارتفاع) و مختصات تصویر مشابه برای نقاط شکل. انحرافات استاندارد پیشینی برای مکان زمین نقاط شکل در هر مجموعه داده با توجه به تخمین دقت موقعیت متفاوت بود. شکل 7 مجموعه داده هایی را نشان می دهد که به یک تصویر پایه به طور دقیق ارجاع داده شده است.
در شکل 7 بردارهای OSM به رنگ سبز، وکتورهای TNM به رنگ زرد و بردارهای TIGER 07 به رنگ آبی هستند. از بازرسی بصری، به نظر می رسد خطوط TIGER 07 بیشتر از OSM یا TNM جابجا می شوند. با این حال، به خاطر داشته باشید که یک کاربر عمومی ممکن است تصاویر پایه نداشته باشد یا با دقت ارجاع جغرافیایی راحت نباشد تا این قضاوت را بدون تنظیم برداری انجام دهد. باقیمانده های تنظیم افقی برای هر مجموعه داده در جدول 6 خلاصه شده است.
شکل 7. OSM (سبز)، نقشه ملی USGS (TNM) (زرد) و جاده های مرجع رمزگذاری جغرافیایی یکپارچه توپولوژیکی اداره آمار ایالات متحده (TIGER) 2007 (آبی).
جدول 6. باقیمانده های تنظیم برای جاده های OSM، TNM، و TIGER 07.
نمای نزدیک از تقاطع مرکزی که رابطه فضایی خطوط مرکزی جاده را نشان می دهد در شکل 8 ارائه شده است .
شکل 8. نمای نزدیک که جاده های OSM، TNM و TIGER 07 را نشان می دهد.
تجزیه و تحلیل اعداد نشان می دهد که جاده های TNM بهترین دقت موقعیتی را دارند، همانطور که با کوچکترین برآورد RMSE 2.89 متر نشان می دهد، در مقایسه با OSM در 4.35 متر و TIGER 07 در 19.17 متر. این همچنین با مقایسه باقیماندههای تنظیم نقطه شکل تأیید میشود، که نشان میدهد نقاط TNM کمتر از جادههای OSM و TIGER 07 حرکت میکنند. توجه داشته باشید که مقدار RMSE برای OSM کمی با تجزیه و تحلیل بالا متفاوت است، زیرا دو نقطه حذف شده است تا بتوان مقایسه دقیقی بین سه مجموعه داده انجام داد. جادههای TIGER 07 بیشترین جابجایی را دارند، همانطور که توسط بازرسی بصری پیشنهاد شده است، با دو نقطه شکل که بیش از 20 متر در جهت غرب حرکت میکنند. به طور کلی، به نظر می رسد که جاده های TIGER 07 در جهت های شرقی و جنوبی دارای سوگیری هستند، همانطور که با باقیمانده های x منفی و باقیمانده های y مثبت نشان داده می شود.
5. نتیجه گیری و کار آینده
5.1. نتیجه گیری
رویکرد پیشنهادی و مدل تنظیم برداری برای ارزیابی دقت موقعیتی دادههای برداری جغرافیایی، مانند خطوط مرکزی جاده، توسعه داده شد. پایگاه داده OSM یک محیط پویا منحصر به فرد را برای استفاده به عنوان موضوع آزمایشی برای این تحقیق فراهم می کند زیرا هدف برجسته آن از ارائه نقشه منبع باز توسط مردم، برای مردم، اهمیت دانستن میزان خوب بودن داده ها را نشان می دهد. به عنوان مثال، مشارکت کنندگان OSM عمدتا داوطلبانه و غیرحرفه ای هستند که علاقه مند به نقشه برداری از یک منطقه محلی هستند که با آن آشنا هستند. بهعلاوه، هیچ استاندارد نقشهکشی یا کیفیت دادهای وجود ندارد تا اطمینان حاصل شود که مشارکتکنندگان به شیوهای مشابه «نقشهبرداری» میکنند یا به الزامات تجهیزات خاص (GPS)، روشهای جمعآوری میدانی، استانداردهای اندازهگیری تصویر، یا استانداردهای دقت نقشه پایبند هستند.
اکثر روشهای فعلی برای تعیین دقت موقعیتی مبتنی بر مقایسه بردارهای آزمایشی با مجموعه داده مرجع/حقیقت است که کیفیت بالاتری دارد. با این حال، این روش ها ماهیت دقیقی ندارند (مدل سازی کامل و انتشار خطا در سیستم). برای پرداختن به این موضوع، مدل تنظیم برداری ارائه شده در اینجا مبتنی بر اعمال اصول دقیق موقعیت یابی فتوگرامتری به داده های برداری برای تعیین دقت موقعیتی نقاط شکل است. از تصاویر هوایی برای ساخت یک مدل استریو تحلیلی با نقاط شکل GCP و برداری استفاده شد تا معادلات هم خطی را با تنظیم بستهای اعمال کند. پس از تنظیم، نقاط شکل برداری نزدیکتر به مکانهای زمین واقعی «واقعی» خود تبدیل میشوند و باقیماندههای تنظیم، دقت موقعیت نقطه شکل را توصیف میکنند.
رویکرد پیشنهادی در چندین خیابان شهری شبکهبندی شده شهری از پایگاه داده OSM آزمایش شد. نتایج نشان میدهد که نقاط شکل پس از تنظیم به میزان 86 درصد بهبود یافته است. علاوه بر این، تنظیم برداری توانست 95 درصد از جابجایی موقعیتی واقعی موجود در نقاط شکل را بازیابی کند. هنگامی که این اطلاعات ارزشمند برای داده های برداری محاسبه می شود، می توان آن را به عنوان یک ویژگی در سطح ویژگی ثبت کرد، در نتیجه سودمندی کلی پایگاه داده را بهبود می بخشد و به کاربر اجازه می دهد تا تصمیمات آگاهانه تری بر اساس داده ها بگیرد. برای نشان دادن کاربرد عملی تنظیم برداری، از آن برای مشخص کردن دقت موقعیت بردارهای جاده OSM، TNM و TIGER 07 با مقایسه مقادیر RMSE باقیماندههای تنظیم استفاده شد.
5.2. کارهای آینده و توصیه ها
یکی از کاربردهای این تحقیق استفاده از خروجی باقیمانده نقطه شکل تنظیم شده از مدل تنظیم برداری به عنوان ورودی برای یک روش “آمیختگی هوشمند” است. برای مثال، این سناریو ممکن است شامل دو شبکه جادهای با ویژگیها و هندسههای متفاوت باشد که میتوانند از ادغام در یک محصول بهره ببرند. به طور سنتی، کاربر یکی از مجموعه دادهها را مشخص میکند که باید به عنوان مرجع کنترل هندسه (برای ویژگیهای همسان) که در محصول ترکیبی غالب است، نگهداری شود. این تصمیم معمولا بر اساس دانش و تجربه کلی کاربران با داده ها است و در سطح پایگاه داده یا لایه اتخاذ می شود. با این حال، اجرای مدل تنظیم بردار پیشنهادی میتواند اطلاعات دقت موقعیتی را در سطح ویژگی ارائه دهد، به عنوان مثال، خطوط مرکزی جاده جداگانه. سپس این اطلاعات می تواند در یک راه حل ترکیبی استفاده شود که در آن ویژگی های منطبق با یکدیگر مقایسه می شوند و موردی که کمترین جابجایی موقعیتی را دارد به عنوان مرجع غالب می شود و به محصول مخلوط شده منتقل می شود.
این پروژه تحقیقاتی از تصاویر قاب هوایی استفاده کرد که مساحتی کمتر از 1 کیلومتر مربع از سطح زمین را پوشش می داد. اگرچه، برای نشان دادن این اثبات مفهوم مفید بود، اما گسترش این کار به فناوری تصویربرداری ماهواره ای سودمند خواهد بود. به عنوان مثال، ماهواره های تجاری مانند Quickbird برای گرفتن تصاویر با مسافت 10 کیلومتر مربع شناخته شده اند، یا بیشتر، از پوشش زمین. این اجازه می دهد تا یک قطعه بسیار بزرگتر از یک پایگاه داده برداری آزمایش شود. مدل موقعیتیابی برای تصاویر کمی متفاوت خواهد بود زیرا ماهوارهها از سیستمهای اسکن برای به دست آوردن خطوط تصویر در طول زمان استفاده میکنند، که نیاز به استفاده از مدلسازی حسگر برای تعیین دقیق تصویر و مختصات زمین دارد. با این وجود، مدل حسگر را می توان از ارائه دهنده تصویر ماهواره ای به دست آورد یا با استفاده از یک مدل حسگر جایگزین [ 47 ] تقریب زد.
رویکرد پیشنهادی در این مرحله تا حدی دستی است، و از یک فرد میخواهد تا تصاویر را برای شناسایی مختصات تصویر برای مکانهای نقطه شکل اندازهگیری کند. با این حال، این فرآیند میتواند با انجام ثبت بردار به تصویر بین شبکه جادهای بردار و جادههای مربوطه در تصویر، خودکار شود. تقاطع های جاده ای به عنوان یک کاندید ایده آل برای ایجاد مکاتبات بین هر مجموعه داده به دو دلیل عمل می کنند: (1) بردارهای جاده خطی معمولاً در گره ای که مختصات آن مرکز تقاطع را نشان می دهد، تلاقی می کنند، و (2) تقاطع ها معمولاً برای استخراج ویژگی های خودکار عملکرد خوبی دارند. الگوریتمهای (AFE) که برای شناسایی تقاطع در تصویر مورد نیاز است. سپس تنظیم برداری می تواند بر اساس فایل های ورودی مختصات تصویر خودکار شود.و غیره
در نهایت، داده های جغرافیایی منبع باز فرصتی منحصر به فرد برای بهره برداری از ویژگی های موقعیت جغرافیایی مرتبط با آن ارائه می دهد. تحقیقات آینده باید بررسی کند که چگونه میتوان از جادههای OSM (به عنوان شبه GCP) برای تعیین/بهبود مکان حسگر (موقعیت و نگرش) استفاده کرد که تصاویر را جمعآوری میکند. این اساساً برعکس کاری است که در اینجا انجام میشود و میتواند برای کاربردهای موقعیتیابی جغرافیایی سیستمهای سنجش غیرسنتی، مانند پلتفرمهای وسایل نقلیه هوایی بدون سرنشین (UAV) مفید باشد.










 عبارت های ماتریس چرخشی هستند که در رابطه (4) فرموله شده اند.
عبارت های ماتریس چرخشی هستند که در رابطه (4) فرموله شده اند.





 بردار باقیمانده برای مختصات تصویر اندازه گیری شده است. باقیماندههای تنظیم مهم هستند زیرا تفاوت بین مقادیر اندازهگیری شده و تنظیمشده را توصیف میکنند، که نشاندهنده خوبی است از اینکه تنظیم چقدر اندازههای ورودی را در نتیجه فرآیند تنظیم جابجا کرده است.
بردار باقیمانده برای مختصات تصویر اندازه گیری شده است. باقیماندههای تنظیم مهم هستند زیرا تفاوت بین مقادیر اندازهگیری شده و تنظیمشده را توصیف میکنند، که نشاندهنده خوبی است از اینکه تنظیم چقدر اندازههای ورودی را در نتیجه فرآیند تنظیم جابجا کرده است.



















































بدون نظر