

خلاصه
تشخیص سرعت صفر ; فیلتر کالمن بدون عطر تطبیقی ; زاویه سمت ؛ مطابقت نقشه طبقه ; واحد اندازه گیری اینرسی ; محاسبه مردگان عابر پیاده
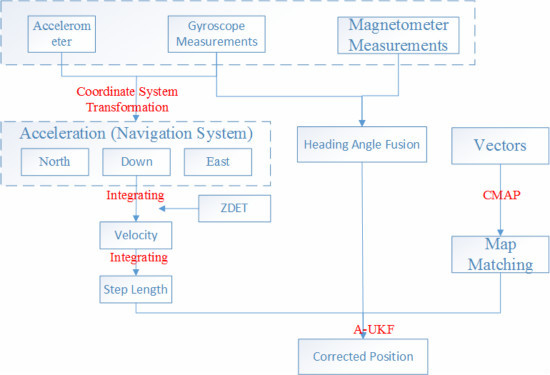
چکیده گرافیکی
1. معرفی
2. یک مدل PDR بهبود یافته
2.1. تشخیص سرعت صفر
2.1.1. پردازش شتاب
- (1)
-
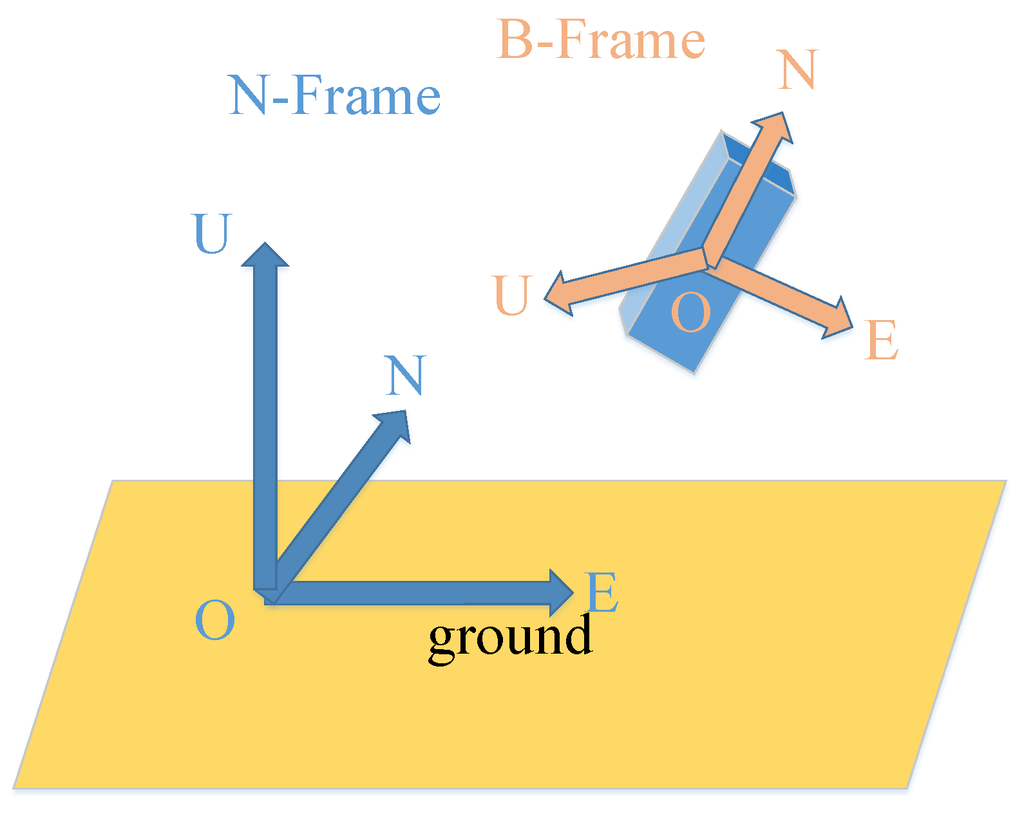
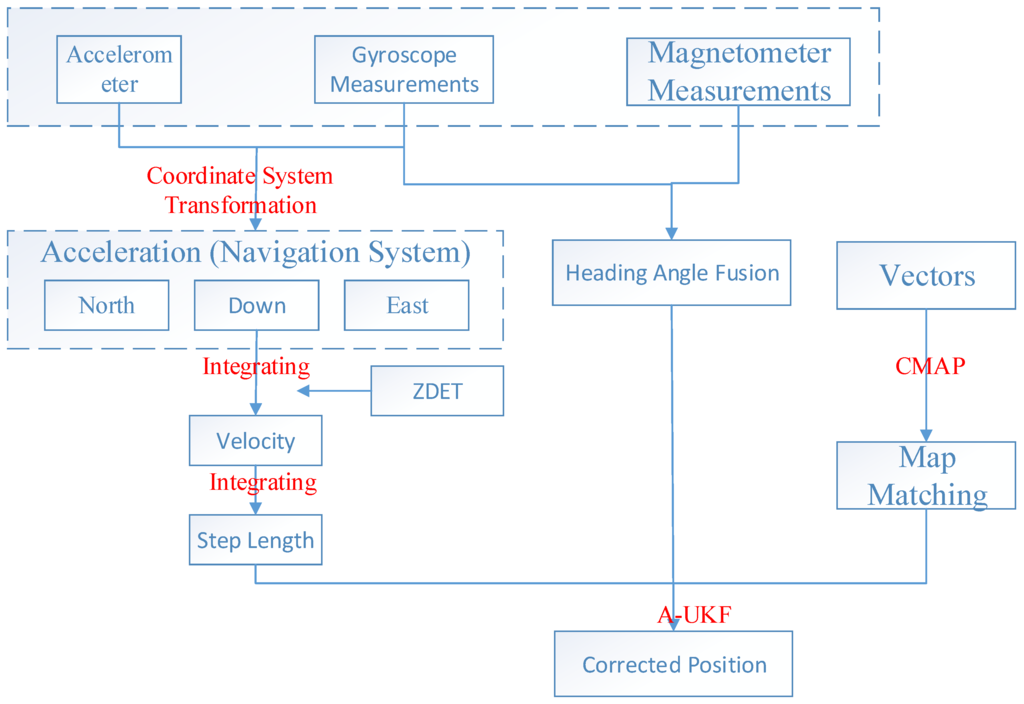
شتاب های گرفته شده را تغییر دهید. acc i از قاب B (B) به قاب ناوبری (N) تبدیل می شود همانطور که شکل 1 در زیر با استفاده از ماتریس چرخش نشان می دهد:یک ججنمن=آرB → N ⋅ یک سی جبمنآججمنن=آرب→ن · آججمنب; سپس، تأثیر گرانش از بین می رود.
- (2)
-
شتاب را در هر رویداد موضعی فیلتر کنید:
- (آ)
-
قدر شتاب سنج را محاسبه کنید: a c c _ m a g= a c cایکس2+ a c cY2+ a c cز2–––––––––––––––––––√آجج_مترآ�= آججایکس2+آجج�2+آججز2، جایی که a c c Xآججایکس، a c c Yآجج�و a c c Zآججزشتاب سه محوره را در کادر ناوبری نشان می دهد.
- (ب)
-
داده های شتاب سنج فیلتر High-Pass (HP). فیلتر دیجیتال و آنالوگ Butterworth که نوعی فیلتر معمولی HP/LP می باشد در این الگوریتم استفاده شده است: [ b ، a ] = B UتیتیER ( N، دبلیوn ، ‘ s ‘ )[ب،آ]=ب�تیتی�آر(ن،دبلیو�،‘س‘)، که در آن N برابر با 1 و ” s ” برابر با “بالا” است. دبلیوnدبلیو�باید 0.0 < را برآورده کند دبلیوnدبلیو�< 1.0، با 1.0 مربوط به نیمی از نرخ نمونه.
2.1.2. مدل تشخیص سرعت صفر (ZDET).
- (1)
-
آزمون نسبت احتمال تعمیم یافته (GLRT)
جایی که g( من )�(�)و f( من )�(من)نشان دهنده داده های ژیروسکوپ سه محوره و شتاب آزاد به ترتیب و ϵg��و ϵf��انحراف استاندارد نویز مربوطه را نشان می دهد. در همین حال، n اندازه پنجره آشکارساز سرعت صفر را نشان می دهد و T آماره تست آشکارساز است.
- (2)
-
تست واریانس اندازه گیری شتاب سنج (MV)
جایی که الف ( من )آ(من)نشان دهنده داده های خام در شتاب سه محوره و a v gآ��نشان دهنده مقدار متوسط شتاب از 1 تا n است .
- (3)
-
تست بزرگی اندازه گیری شتاب سنج (MAG)
جایی که n o r m���مترخطی سازی است و gr a v��آ�گرانش محلی را نشان می دهد.
- (4)
-
تست انرژی اندازه گیری نرخ زاویه ای (ARE)

2.2. تخمین طول مرحله
- (1)
-
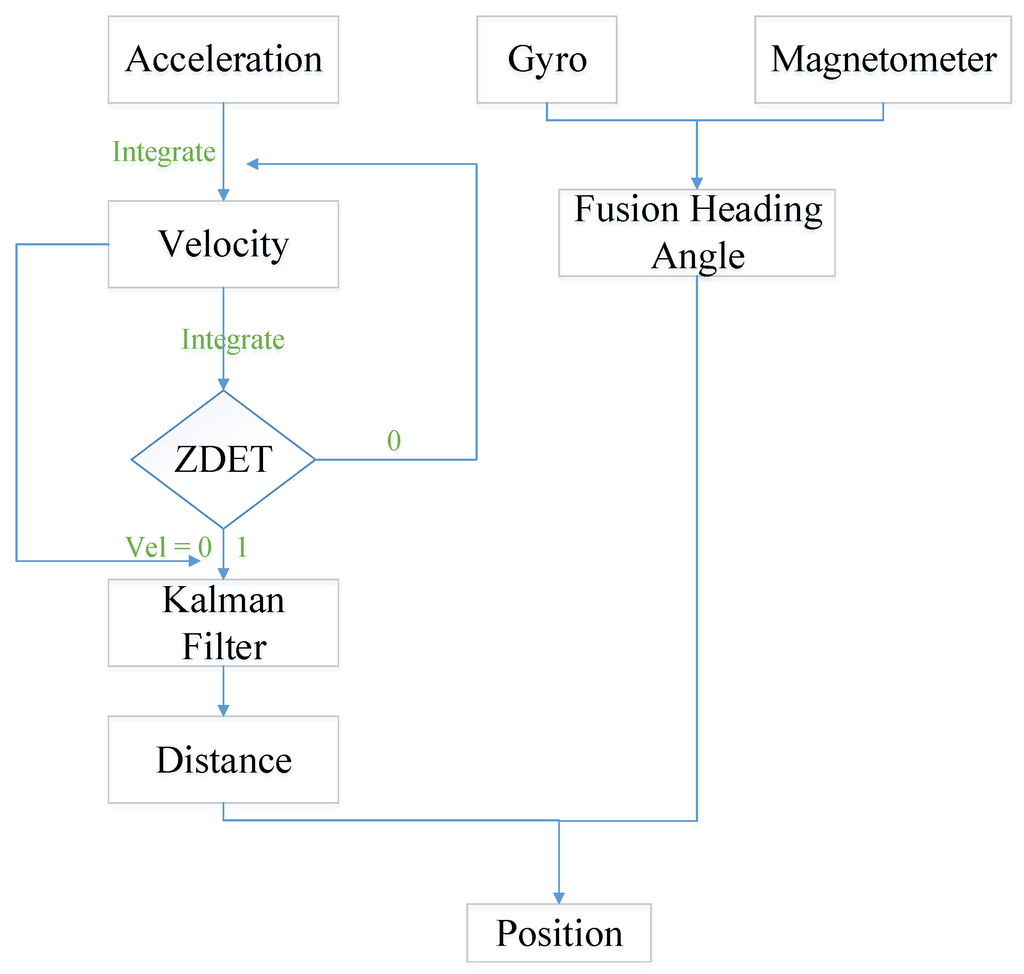
تشخیص شتاب پس از گام در هر مرحله، یک ججنمنآججمنن، برای به دست آوردن سرعت خطی یکپارچه شده است v eلنمن�هلمنن: v eلنمن= v e لنمن+ یک ججنمن/ اسa m p l e R a t e�هلمنن= �هلمنن+آججمنن/اسآمترپلهآرآتیه. وقتی پا ثابت است سرعت را صفر می کنیم [ 25 ].
- (2)
-
افزایش موقعیت را در مرحله k بدست می آوریم ، Δپک= ( Δپک( n o r t h ) , Δپک( e a s t ) , Δپک( u p ) )Δپک=(Δپک(���تیساعت)،Δپک(هآستی)،Δپک(توپ))با ادغام نمونه های سرعت تصحیح شده، v eلنمن�هلمنن، در هر مرحله:Δپک=∑j = i ( k − 1 )من ( k )v eلنمن/ اسa m p l e R a t eΔپک=∑�=من(ک–1)من(ک)�هلمنن/اسآمترپلهآرآتیه
- (3)
-
SL 2D با گرفتن فاصله دکارتی افقی افزایش موقعیت محاسبه می شود:اسLزUپتیک=Δپک( n o r t h )2+ Δپک( e a s t )2–––––––––––––––––––––√اس�ز�پتیک=Δپک(���تیساعت)2+Δپک(هآستی)2
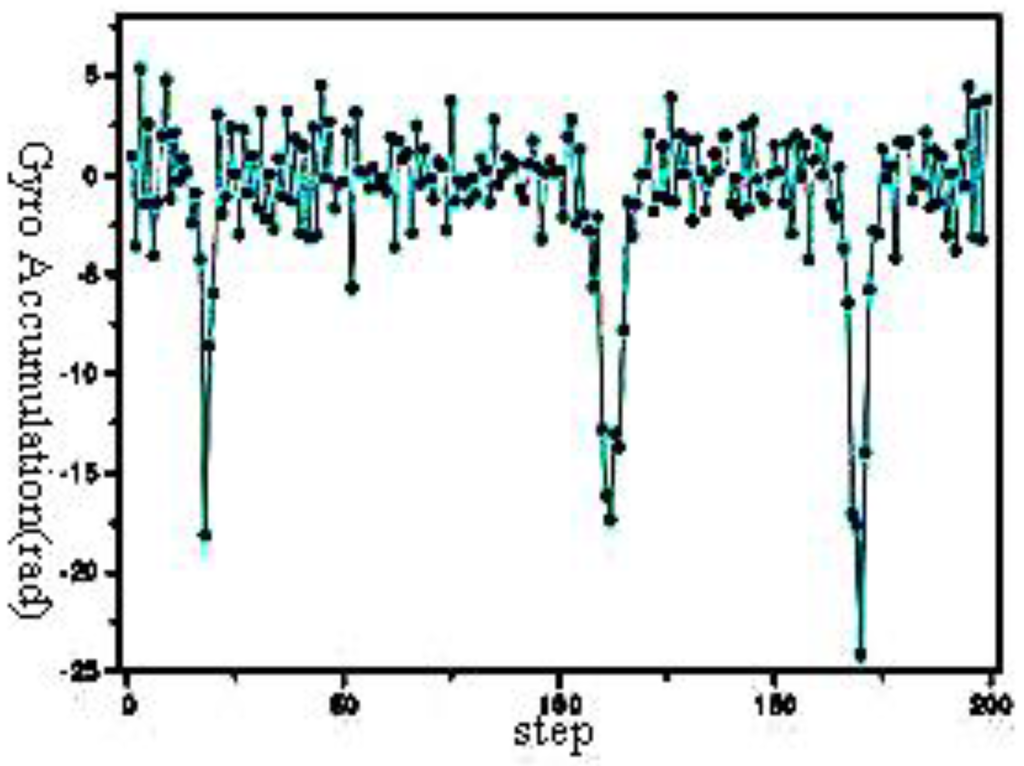
2.3. تعیین سرفصل با ترکیب داده های ژیروسکوپ و مغناطیس سنج
که در آن m و n به ترتیب نشاندهنده مغناطیسسنج و ژیروسکوپ هستند و α ، β و γ وزنهای اندازهگیری جریان از ژیروسکوپ و مغناطیسسنج هستند. θمتر، k�متر،کو θg، ک��،کاندازه گیری های بدست آمده توسط ژیروسکوپ و مغناطیس سنج را به ترتیب نشان می دهد کتی ساعتکتیساعتگام. θمتر�مترانحراف استاندارد مغناطیس سنج است و θج�جهمبستگی بین مغناطیس سنج و قرائت ژیروسکوپ است. θΔ ، ج�Δ،جتفاوت بین است θm ، k�متر،کو θg، ک��،ک. θΔ ، m�Δ،مترتفاوت در قرائت های مغناطیس سنج بین دو مرحله متوالی k و k-1 است .

2.4. PDR بهبود یافته
3. الگوریتم تطبیق نقشه طبقه
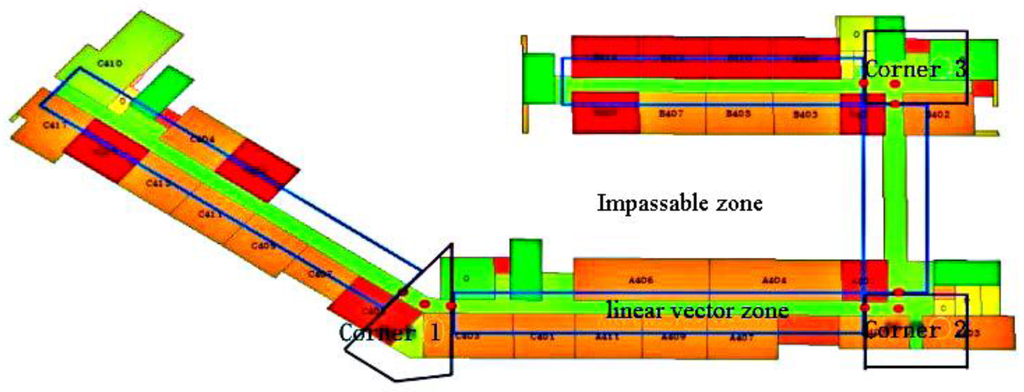
3.1. الگوریتم تطبیق همبستگی بر اساس طرح ریزی (CMAP)

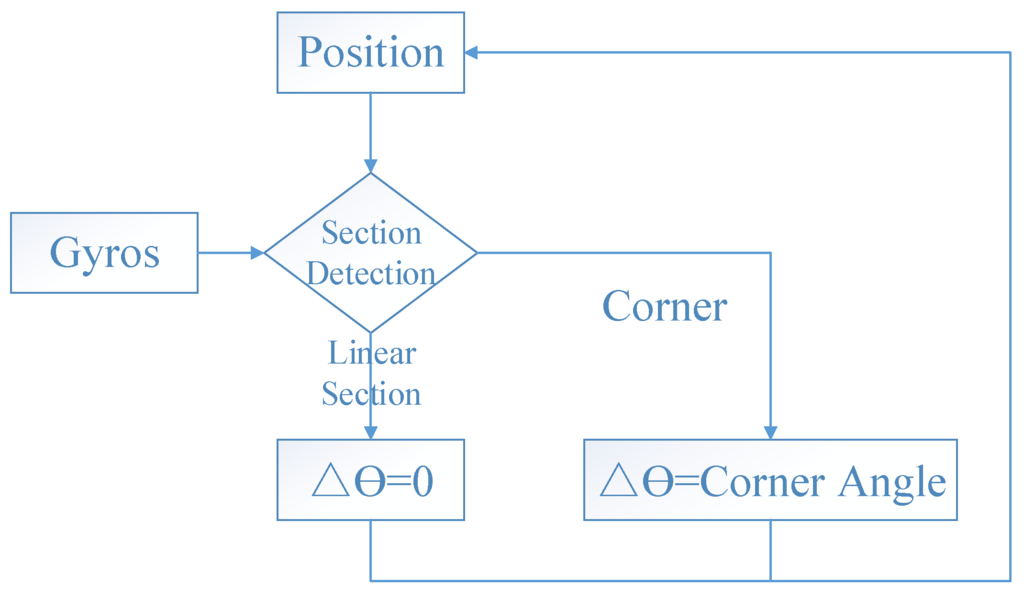
3.2. بخش منطقه

3.3. تطبیق برداری
4. فیلتر کالمن بدون عطر تطبیقی (A-UKF)
4.1. معادله دینامیک
جایی که نکنکو Eک�کوضعیت های موقعیت در جهت شمالی و جهت شرقی به ترتیب در زمان k هستند . θک�کزاویه سمت عابر پیاده را نشان می دهد. س˜س˜و θ˜�˜طول گام و سرعت زاویه را به ترتیب نشان دهید. و W k-1 نویز سیستم در زمان k – 1 است .
4.2. معادله مشاهده
جایی که سکسکطول گام است که با استفاده از افزایش سرعت دو مرحله متوالی محاسبه می شود و ΔθکΔ�کمتغیر زاویه سمت است که توسط CMAP تعیین می شود، از جمله گوشه ها و گالری ها. θک�کk امین زاویه است که با فرمول (5) اندازه گیری می شود و V بردار نویز اندازه گیری است.
4.3. الگوریتم A-UKF
- (1)
-
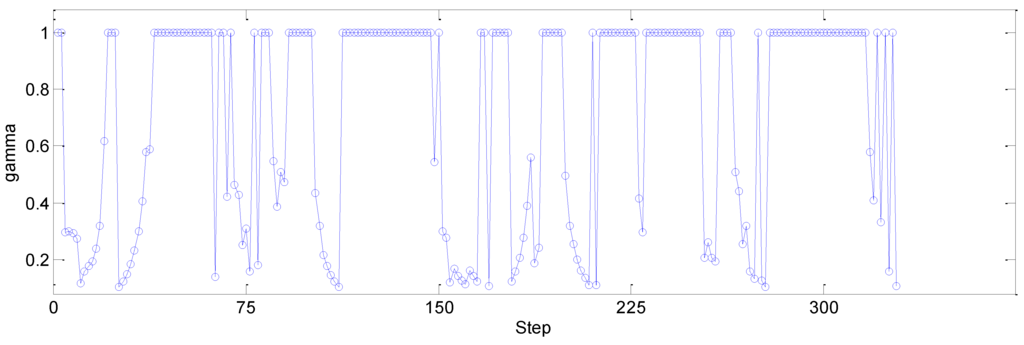
پارامتر تطبیقی
که در آن tr(·) فرمول ردیابی را نشان می دهد. شکل تابع عامل تطبیقی به صورت زیر است:
که در آن C ثابت است و مقدار آن بین 0.85 و 1 است.
- (2)
-
محاسبه واریانس معادل فیلتر تطبیقی
جایی که پk | k − 1پک|ک–1نشان دهنده واریانس نقطه نمونه پیش بینی کننده (PSP) و پv vپ��و پx vپایکس�به ترتیب واریانس و کوواریانس نقطه اندازه گیری پیش بینی کننده (PMP) را نشان می دهد.
4.4. تست عامل تطبیقی

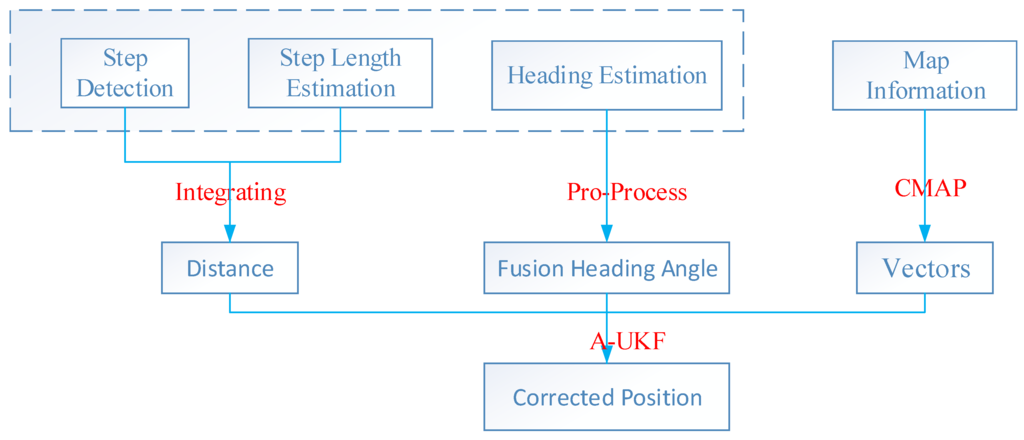
5. طرح یکپارچه سازی نقشه PDR/مگنتومتر/طبقه بهبود یافته
- (1)
-
تحلیل نظری. یک سری از مطالعات پایه مورد تجزیه و تحلیل قرار گرفته است. همانطور که در مقدمه ذکر شد، سیستمهای PDR اخیر به دلیل کوچکسازی مستمر حسگرهای اینرسی (واحد مدیریت اینرسی و سیستم مرجع سرفصل نگرش) به گزینهای امکانپذیر برای محلیسازی فضای داخلی تبدیل شدهاند. علاوه بر این، بر اساس سه مؤلفه اصلی PDR (تشخیص مرحله، تخمین طول گام و تعیین جهت)، الگوریتم ZDET، یک الگوریتم غیر معمول اما دقیق، را برای تشخیص گام انتخاب میکنیم. سپس در طول هر مرحله، از یک الگوریتم یکپارچه سازی پیوسته برای تعیین فاصله با شتاب استفاده می شود که از شتاب سنج ثبت شده و به مختصات قاب N تبدیل می شود. علاوه بر این، تعیین جهت گیری باید ضروری ترین گام باشد. بنابراین ما از یک فیلتر ترکیبی برای ترکیب داده ها استفاده می کنیم.
- (2)
-
توسعه روش شناسی یکپارچه سازی. در آزمایش، چندین فیلتر مانند Extended Kalman Filter، Unscented Kalman Filter، Particle Filter و غیره مورد آزمایش قرار می گیرند. با در نظر گرفتن عوامل مختلف، از جمله دقت اندازه گیری (MA) و بار محاسباتی (CL)، ما در نهایت یک نوع فیلتر کالمن بدون عطر تطبیقی (A-UKF) را به عنوان الگوریتم همجوشی انتخاب می کنیم.
- (3)
-
اجرای سیستم فیزیکی و آزمایشات. یک فلوچارت خاص در شکل 11 نشان داده شده است :
6. آزمایش و تجزیه و تحلیل
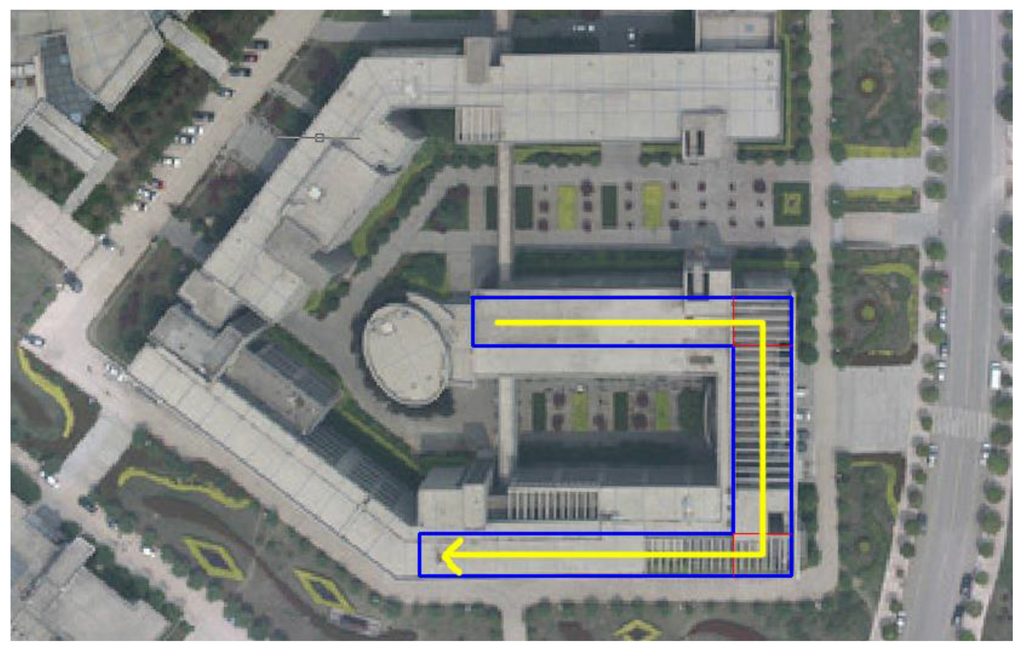
6.1. تجهیزات و موقعیت


6.2. آزمایش کنید
-
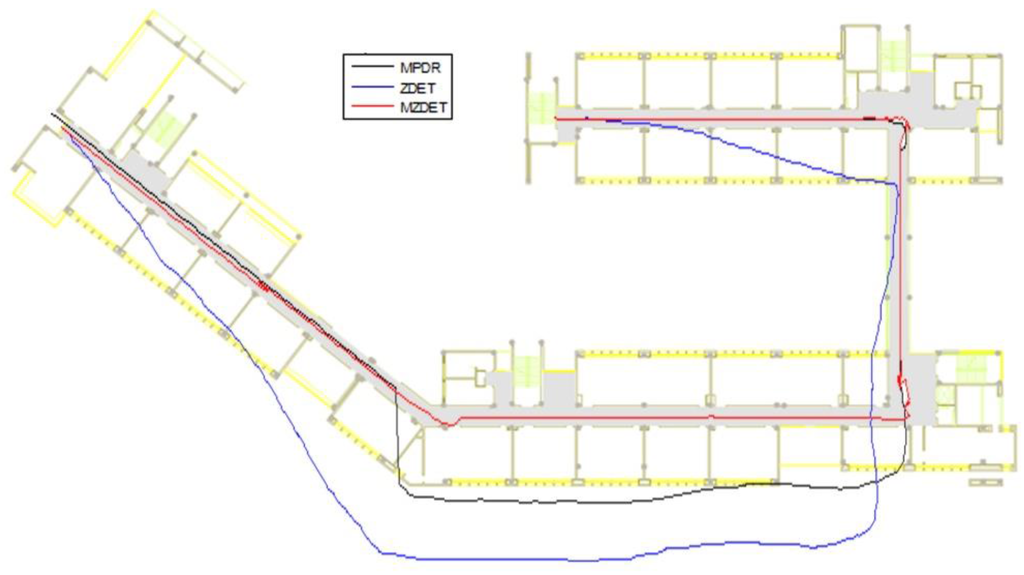
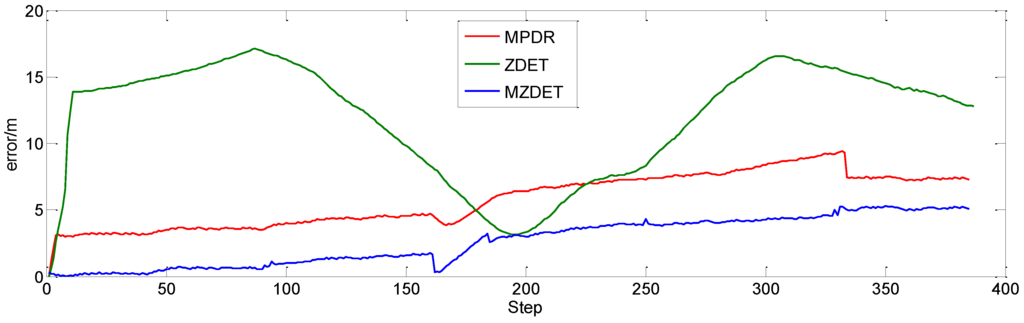
طرح 1: نتیجه ردیابی مبتنی بر PDR به کمک نقشه کف توسط تلفن هوشمند دستی (MPDR).
-
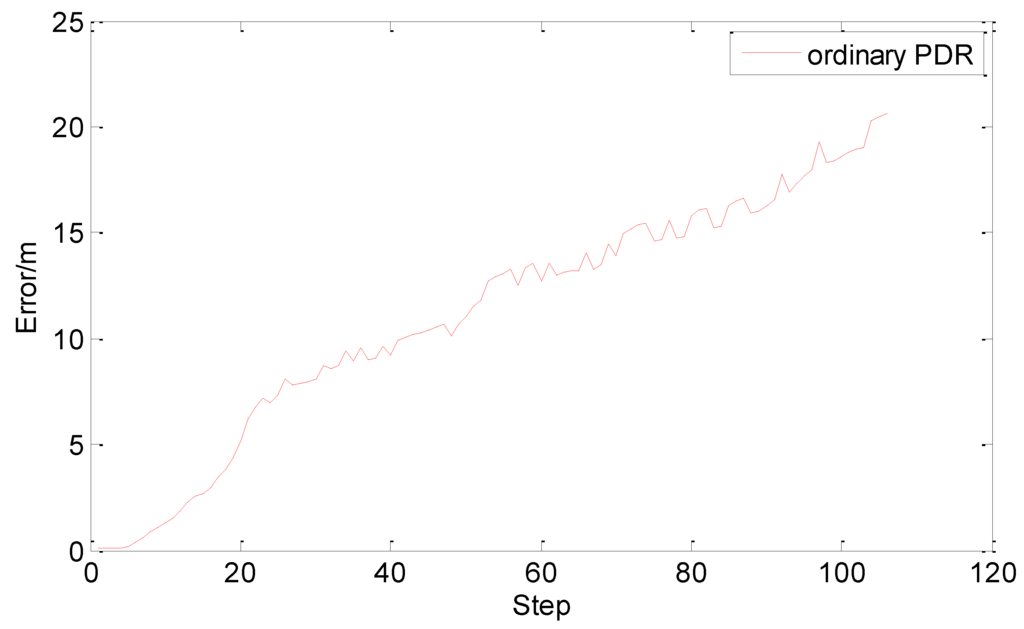
طرح 2: تست موقعیت یابی داخلی مبتنی بر ZDET با داده های معمولی (ZDET).
-
طرح 3: تست موقعیت یابی داخلی مبتنی بر ZDET با تطبیق نقشه (MZDET).
6.3. تست استحکام
- (1)
-
با توجه به موضوع تشخیص گام، روش ZDET برای بهبود دقت تشخیص و در نتیجه کاهش نوسان تا حد قابل قبولی و بهبود دقت کل الگوریتم پیشنهاد شد.
- (2)
-
علیرغم دقت بالای ارائه شده توسط تشخیص سرعت صفر، PDR همیشه به دقت قابل توجهی در جهت گیری نیاز دارد، و بنابراین، اکثر آزمایشات با استفاده از PDR به محدودیت هایی برای مقابله با اطلاعات به دست آمده از ژیروسکوپ یا مغناطیس سنج نیاز دارند. با این حال، گنجاندن یک نقشه الکترونیکی از ساختار توسط UKF در تجزیه و تحلیل، عملیات اضافی را حذف می کند، در نتیجه به بهبود سرعت و کیفیت محاسبات کمک می کند.
- (3)
-
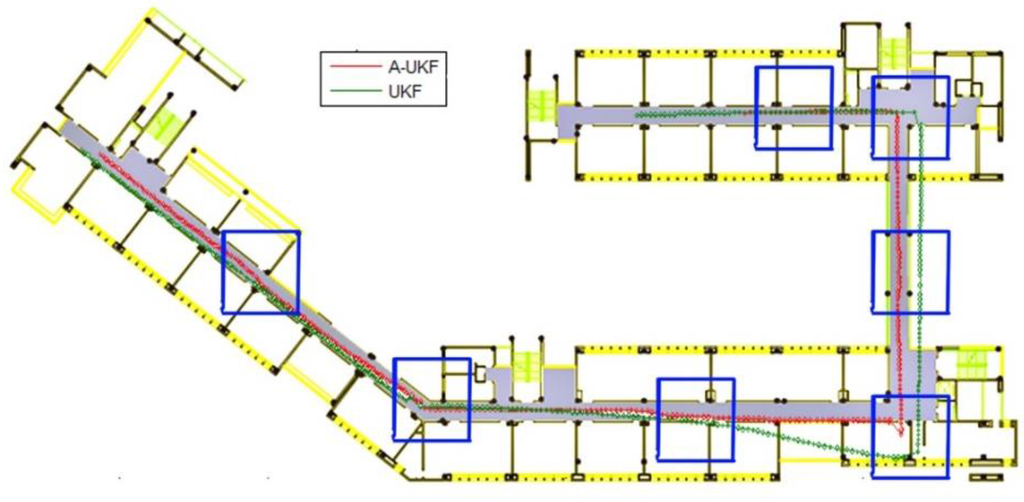
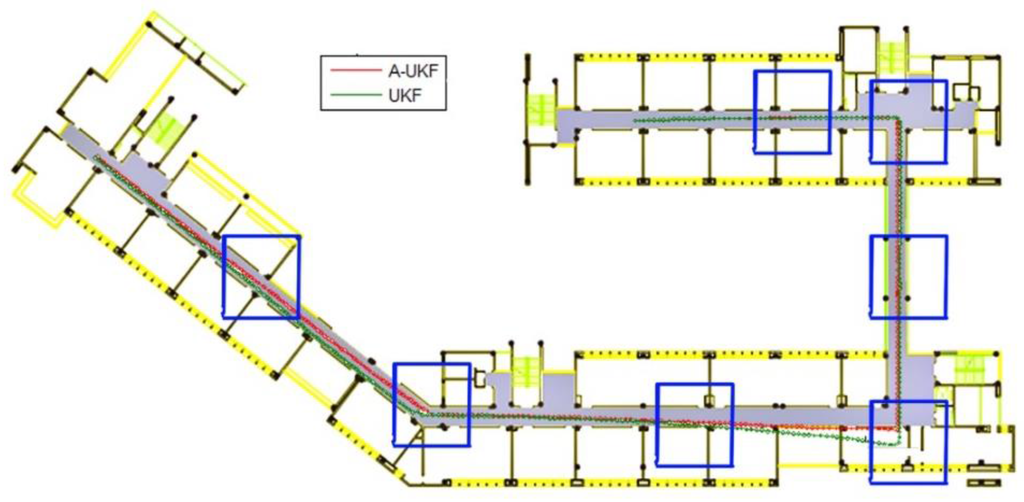
با توجه به پایداری UKF، پارامتر تطبیقی در الگوریتم ادغام شده است. آزمایشها نشان میدهد که در مقایسه با UKF کلاسیک، A-UKF استحکام بسیار قویتری ارائه میدهد، قابلیت اطمینان موقعیتیابی را بهبود میبخشد و تغییر چشمگیری در نرخ عملکرد و کیفیت به سمت بالا ایجاد میکند.
- (4)
-
با توجه به CL قابل توجه A-UKF، که می تواند با محاسبه زمان خواندن در یک تلفن هوشمند معمولی بارگذاری شود، امکان اندازه گیری شبه واقعی با استفاده از تلفن همراه به جای رایانه مرکزی وجود دارد، همانطور که معمولاً در این مورد استفاده می شود. سایر آزمایشات اخیر
7. نتیجه گیری
منابع
- Cho, SY; سیستم ناوبری عابر پیاده مبتنی بر پارک، CG Mems. جی. ناویگ. 2006 ، 59 ، 135-153. [ Google Scholar ] [ CrossRef ]
- کلپال، م. Beauregard، S. یک فیلتر ذرات عقبگرد برای ترکیب نقشههای ساختمان با تخمینهای جابجایی PDR. در مجموعه مقالات پنجمین کارگاه آموزشی موقعیتیابی، ناوبری و ارتباطات، هانوفر، آلمان، 27 مارس 2008. ص 207-212.
- لی، اف. ژائو، سی. دینگ، جی. گونگ، جی. لیو، سی. Zhao، F. یک روش قابل اطمینان و دقیق مکان یابی داخلی با استفاده از حسگرهای اینرسی تلفن. در مجموعه مقالات چهاردهمین کنفرانس بین المللی محاسبات همه جا حاضر، پیتسبورگ، PA، ایالات متحده آمریکا، 5 تا 8 سپتامبر 2012. ص 421-430.
- کورگی، م. Kurata، T. موقعیت یابی شخصی بر اساس تجزیه و تحلیل حرکت راه رفتن با حسگرهای مستقل و یک دوربین پوشیدنی. در مجموعه مقالات دومین سمپوزیوم بین المللی IEEE/ACM در مورد واقعیت ترکیبی و افزوده، واشنگتن، دی سی، ایالات متحده آمریکا، 7 تا 10 اکتبر 2003. صص 103-112.
- هارل، آر. بررسی سیستم های موقعیت یابی اینرسی داخلی برای عابران پیاده. IEEE Commun. Surv. معلم خصوصی 2013 ، 15 ، 1281-1293. [ Google Scholar ] [ CrossRef ]
- Lan، KC؛ Shih, WY استفاده از تلفن های هوشمند و پلان های طبقه برای ردیابی مکان داخلی. IEEE Trans. هوم ماخ سیستم 2014 ، 44 ، 211-221. [ Google Scholar ]
- کولومار، دی اس؛ نیلسون، جی. هندل، P. صاف کردن INS های با کمک ZUPT. در مجموعه مقالات کنفرانس بین المللی 2012 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، سیدنی، استرالیا، 13 تا 15 نوامبر 2012. صص 1-5.
- نیلسون، جو. اسکوگل، آی. هندل، پی. Hari، KVS Foot-mounted INS for all—یک پیاده سازی جاسازی شده منبع باز. در مجموعه مقالات سمپوزیوم موقعیت مکانی و ناوبری IEEE/ION 2012 (PLANS)، Myrtle Beach، SC، ایالات متحده، 23-26 آوریل 2012. صص 140-145.
- هندل، پی. رانتاکوکو، جی. اسکوگ، آی. نیلسون، JO تشخیص سرعت صفر – ارزیابی الگوریتم. IEEE Trans. بیومد. مهندس 2010 ، 57 ، 2657-2666. [ Google Scholar ]
- عطیا، م. موسی، ع. El-Sheimy، N. Map با استفاده از اطلاعات ساختمانها برای برنامههای ناوبری داخلی به محاسبه مردگان عابر پیاده کمک کرد. موقعیت یابی 2013 ، 4 ، 227-239. [ Google Scholar ] [ CrossRef ]
- نورمینن، اچ. ریستیماکی، ع. علی لوتی، س. Piché، R. فیلتر ذرات و صاف کننده برای مکان یابی داخلی. در مجموعه مقالات کنفرانس بین المللی 2013 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، Montleliard-Belfort، فرانسه، 28-31 اکتبر 2013. صص 1-10.
- وانگ، جی. هو، ا. لیو، سی. Li, X. یک الگوریتم یکپارچه سازی WIFI/شبه کیلومتر شماری به کمک نقشه کف برای یک سیستم موقعیت یابی داخلی. Sensors 2015 , 15 , 7096–7124. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Lim, C.-H.; وان، ی. Ng، B.-P. C. یک سیستم محلی سازی WIFI داخلی در زمان واقعی با استفاده از آنتن های هوشمند. IEEE Trans. مصرف کنید. الکترون. 2007 ، 53 ، 618-622. [ Google Scholar ] [ CrossRef ]
- لیم، J.-S. جانگ، W.-H. یون، جی.-و. دست ها. اتوماسیون به روز رسانی نقشه رادیویی برای سیستم های موقعیت یابی WIFI. IEEE Commun. Lett. 2013 ، 17 ، 693-696. [ Google Scholar ] [ CrossRef ]
- محفوظ، محمدرضا; کوهن، ام جی; به، G. Fathy، AE ادغام UWB و نقشه فشار بی سیم در ناوبری جراحی. IEEE Trans. مایکرو. فناوری تئوری 2009 ، 57 ، 2550-2564. [ Google Scholar ] [ CrossRef ]
- مارانو، اس. گیفورد، WM; وایمیرش، اچ. Win، MZ Nlos شناسایی و کاهش برای محلی سازی بر اساس داده های تجربی UWB. IEEE J. Sel. مناطق کمون. 2010 ، 28 ، 1026-1035. [ Google Scholar ] [ CrossRef ]
- سانپچودا، تی. Kovavisaruch، L. بررسی محلی سازی RFID: کاربردها و تکنیک ها. در مجموعه مقالات پنجمین کنفرانس بین المللی مهندسی برق/الکترونیک، کامپیوتر، مخابرات و فناوری اطلاعات، کرابی، تایلند، 14 تا 17 مه 2008. صص 769-772.
- کیم، تی. شین، جی. تک، S. برنامه ریزی سلول برای ردیابی اشیاء داخلی بر اساس RFID. در مجموعه مقالات دهمین کنفرانس بینالمللی مدیریت دادههای تلفن همراه: سیستمها، خدمات و میانافزار، تایپه، تایوان، 18 تا 20 مه 2009. ص 709-713.
- نبیه، ع.ک. عثمان، اچ. گوما، م. Aly، GM طرح موقعیت یابی داخلی مبتنی بر فازی جدید با استفاده از پروتکل بی سیم ZigBee. در مجموعه مقالات هفتمین کنفرانس بین المللی مهندسی کامپیوتر و سیستم ها (ICCES)، قاهره، مصر، 27-29 نوامبر 2012; ص 16-20.
- چانگ، AY؛ لیو، تی.-سی. ارزیابی عملکرد موقعیتیابی داخلی در زمان واقعی با سیستمهای WSN مبتنی بر RFID و ZigBee فعال. J. Vibroeng. 2013 ، 15 ، 736. [ Google Scholar ]
- جینامو، جی. کوربی، سی. لوویزولو، پی. لینگوا، ا. آیکاردی، آی. Grasso, N. برآورد موقعیت و جهت گیری دقیق در محیط شهری بر اساس مدل های سه بعدی. در روندهای جدید در تجزیه و تحلیل و پردازش تصویر – کارگاه های آموزشی ICIAP 2015 ; مورینو، وی.، اد. Springer: Cham, Switzerland, 2015; ص 185-192. [ Google Scholar ]
- جینامو، جی. کوربی، سی. فرانسینی، جی. لپسوی، اس. لوویزولو، پی. لینگوا، ا. Aicardi، I. راه حل جستجوی تصویری MPEG7 برای موقعیت یابی مبتنی بر تشخیص تصویر با استفاده از مدل های سه بعدی. در مجموعه مقالات بیست و هفتمین نشست فنی بینالمللی بخش ماهواره مؤسسه ناوبری، تامپا، فلوریدا، ایالات متحده آمریکا، 8 تا 12 سپتامبر 2014.
- فلیز آلونسو، آر. زالاما کازانووا، ای. Gómez García-Bermejo، J. ردیابی عابر پیاده با استفاده از حسگرهای اینرسی. J. Phys. عوامل 2009 ، 3 ، 35-43. [ Google Scholar ]
- مادویک، SO یک فیلتر جهت گیری کارآمد برای آرایه های حسگر اینرسی و اینرسی/مغناطیسی. در دسترس آنلاین: https://www.samba.org/tridge/UAV/madgwick_internal_report.pdf (در 30 آوریل 2010 قابل دسترسی است).
- مادویک، SOH؛ هریسون، AJL; Vaidyanathan، A. برآورد جهت گیری IMU و MARG با استفاده از الگوریتم نزول گرادیان. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در مورد رباتیک توانبخشی (ICORR)، زوریخ، سوئیس، 29 ژوئن تا 1 ژوئیه 2011. صص 1-7.
- برنشتاین، دی. Kornhauser، A. مقدمه ای بر تطبیق نقشه برای دستیاران ناوبری شخصی . New Jersey TIDE Center: Newark, NJ, USA, 1998. [ Google Scholar ]
- جیمنز، آر. سکو، اف. پریتو، جی سی. گوارا، جی. ناوبری عابر پیاده در داخل ساختمان با استفاده از چارچوب INS/EKF برای کاهش رانش انحرافی و IMU روی پا. در مجموعه مقالات هفتمین کارگاه آموزشی جهت یابی موقعیت یابی و ارتباطات (WPNC)، درسدن، آلمان، 11 تا 12 مارس 2010. صص 135-143.
- مدر، تی. هافنر، پی. ویسیول، ک. Wieser, M. موقعیت یابی 3 بعدی داخل ساختمان با محاسبه مردگان عابر پیاده و تشخیص فعالیت بر اساس فیلتر bayes. در مجموعه مقالات کنفرانس بین المللی موقعیت یابی داخلی و ناوبری داخلی، بوسان، کره، 27 تا 30 اکتبر 2014.
- زامپلا، اف. خدر، م. رابرتسون، پی. Jiménez, A. فیلتر کالمن بدون عطر و بهروزرسانی نرخ زاویهای مغناطیسی (MARU) برای بهبود محاسبه مرده عابر پیاده. در مجموعه مقالات سمپوزیوم موقعیت مکانی و ناوبری IEEE/ION 2012 (PLANS)، Myrtle Beach، SC، ایالات متحده، 21-23 سپتامبر 2011. صص 129-139.
- یانگ، ی. Gao, W. فیلتر کالمن تطبیقی بهینه. جی. جئود. 2006 ، 80 ، 177-183. [ Google Scholar ] [ CrossRef ]
- رن، ایکس. یانگ، ی. تجزیه و تحلیل طیفی قوی سری های زمانی تصحیح یونوسفر زمین. جی. جئود. ژئودین. 2014 ، 2 ، 115-119. [ Google Scholar ]
© 2015 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر