

خلاصه
عملیات وسیله نقلیه تجاری (CVO) یک کاربرد محبوب در سیستم های حمل و نقل هوشمند بوده است. تعیین مکان و ردیابی مسیر یک واحد سواری (OBU) در یک وسیله نقلیه یک قابلیت مهم برای CVO است. با این حال، خطاهای مکان یابی بزرگ از گیرنده های سیستم موقعیت یابی جهانی (GPS) ممکن است در شهرهایی رخ دهد که از سیگنال های GPS محافظت می کنند. بنابراین، یک روش موقعیتیابی موبایل بسیار کارآمد بر اساس جمعآوری و تجزیه و تحلیل سیگنالهای شبکه سلولی دادههای CVO پیشنهاد شدهاست. تکنیکهای محاسباتی موازی و ابری در روش پیشنهادی برای تعیین سریع مکان یک OBU برای CVO طراحی شدهاند. علاوه بر این، این مطالعه مدلهای تحلیلی را برای تجزیه و تحلیل در دسترس بودن روش موقعیتیابی موبایل پیشنهادی با معیارهای مختلف فیلتر بیرونی پیشنهاد میکند. به صورت تجربی، یک سیستم CVO برای جمعآوری دادههای CVO از وسایل نقلیه مخابراتی Chunghwa و تجزیه و تحلیل سیگنالهای شبکه سلولی دادههای CVO برای تعیین مکان طراحی و اجرا شد. یک مطالعه موردی نشان داد که میانگین خطاهای تعیین مکان با استفاده از روش پیشنهادیدر مقابل با استفاده از روش سنتی مکان یابی مبتنی بر شناسه سلولی به ترتیب 163.7 متر و 521.2 متر بود. علاوه بر این، نتایج عملی نشان می دهد که میانگین خطای مکان و در دسترس بودن استفاده از روش پیشنهادی بهتر از استفاده از GPS یا روش مکان یابی مبتنی بر سلول برای هر نوع جاده، به ویژه جاده های شهری است. بنابراین، این رویکرد برای تعیین مکان های OBU برای بهبود CVO امکان پذیر است.
کلید واژه ها:
موقعیت یابی موبایل ؛ داده های عملیات خودروهای تجاری ؛ شبکه تلفن همراه ؛ پردازش ابری
1. معرفی
در سال های اخیر الگوهای مصرف و لجستیک با توسعه اقتصادها و افزایش تدریجی درآمدهای ملی تغییر کرده است. علاوه بر این، کانال های توزیع از توزیع مستقیم به استفاده از مراکز توزیع (DC) تغییر کرده اند. DCها می توانند کالاها را هم در بالادست و هم در پایین دست حمل کنند. استفاده از فناوری مدیریت هوشمند ناوگان حمل و نقل برای کنترل ترانزیت کالا نسبت به روشهای سنتی کارآمدتر است و شرکتهای لجستیک از مزایای اقتصادی بالاتری برخوردار میشوند. بنابراین، عملیات وسیله نقلیه تجاری (CVO) یک کاربرد محبوب سیستم های حمل و نقل هوشمند (ITS) بوده است. اجزای CVO شامل مدیریت ناوگان، مدیریت حمل و نقل، ترخیص الکترونیکی، فرآیندهای اداری وسایل نقلیه تجاری، ترخیص گذرگاه های مرزی بین المللی، وزن کشی،
تعیین مکان وسیله نقلیه توسط یک واحد سواری (OBU) برای CVO مهم است. اطلاعات موقعیت مکانی دقیق را می توان برای پشتیبانی از مدیریت ناوگان، مدیریت حمل و نقل، نظارت بر حمل و نقل در حین حمل و نقل و غیره استفاده کرد . به عنوان مثال، DCها می توانند مکان ها و حرکات OBU ها را نظارت کنند و وضعیت حمل و نقل را برای کاربران و گیرنده ها فراهم کنند. سیستم موقعیت یاب جهانی (GPS) محبوب ترین روش تعیین مکان برای OBU ها است [ 1]. با این حال، به دلیل تداخل با سیگنال های GPS در شهرها، خطاهای مکان ممکن است از GPS ایجاد شود. بنابراین، این مقاله تکنیک های موقعیت یابی تلفن همراه را برای به دست آوردن اطلاعات مکان در زمانی که سیگنال های ماهواره های GPS ضعیف هستند، در نظر می گیرد. تکنیکهای مختلفی برای تجزیه و تحلیل سیگنالهای شناسایی فرکانس رادیویی (RFID) [ 2 ]، بلوتوث [ 3 ]، شبکههای محلی بیسیم (WLAN) [ 4 ، 5 ، 6 ]، شبکههای حسگر بیسیم (WSN) [ 7 ، 8] پیشنهاد شدهاند. ] و شبکه های سلولی [ 9 ] برای تعیین مکان [ 10]. با این حال، محدوده انتقال RFID، بلوتوث و WLAN کوتاه است و ممکن است برای CVO مناسب نباشند. بنابراین، این مطالعه یک روش موقعیتیابی موبایل با کارایی بالا را برای تجزیه و تحلیل سیگنالهای شبکه سلولی دادههای CVO پیشنهاد میکند. این روش را می توان با تکنیک های محاسبات ابری ترکیب کرد تا به سرعت مکان یک OBU را تعیین کند. علاوه بر این، یک سیستم CVO شامل OBU و یک سرور CVO در این مطالعه پیشنهاد و اجرا شده است.
ادامه مقاله به شرح زیر است. بخش 2 تکنیک های مختلفی را که از شبکه سلولی برای تعیین مکان بهره برداری می کنند، ارائه و بحث می کند. یک روش موقعیت یابی موبایل با کارایی بالا بر اساس داده های CVO در بخش 3 پیشنهاد و نشان داده شده است . بخش 4 مدلهای تحلیلی را برای تجزیه و تحلیل امکانسنجی روش موقعیتیابی موبایل پیشنهادی با معیارهای مختلف فیلتر بیرونی پیشنهاد میکند. بخش 5 پیاده سازی سیستم CVO را توصیف می کند و سوابق عملی را برای ارزیابی روش پیشنهادی تجزیه و تحلیل می کند. در نهایت، بخش 6 نتیجه گیری ما و کار پیشنهادی آینده را مورد بحث قرار می دهد.
2. روش های تعیین موقعیت مبتنی بر سلول
پروژه مشارکت نسل سوم (3GPP) سه دسته از روشهای موقعیتیابی مبتنی بر سلول را تعریف کرد: سیستم موقعیت جهانی کمکی (A-GPS)، روشهای مکان مبتنی بر گزارش اسکن موبایل (MSR) و روشهای جستجوی پایگاه داده [9 ] .
2.1. GPS کمکی
A-GPS برای انتقال داده های سالنامه از یک سرور موقعیت یابی کمکی به یک دستگاه تلفن همراه از طریق اتصال شبکه طراحی شده است [ 11 ، 12 ]. این روش به زمان کمتری نسبت به روش سنتی GPS، تقریباً سی ثانیه، برای جستجوی ماهواره و تعیین مکان نیاز دارد.
2.2. روش های مکان یابی مبتنی بر MSR
MSR ها، که شامل نشان قدرت سیگنال دریافتی (RSSI)، تاخیر رفت و برگشت (RTD) و تاخیر نسبی (RD) هستند، برای تعیین مکان مورد تجزیه و تحلیل قرار می گیرند. روشهای مکانیابی مبتنی بر MSR را میتوان به سه دسته طبقهبندی کرد: زاویه ورود (AoA) [ 13 ، 14 ، 15 ]، زمان رسیدن (ToA) [ 13 ، 14 ، 16 ]، و اختلاف زمانی رسیدن (TDoA) [ 9 . , 10 , 13 ]. این روش به قدرت محاسباتی بالاتری نسبت به روش های دیگر نیاز دارد [ 12 ، 17 ، 18 ، 19 ].
2.3. روش های جستجوی پایگاه داده
روش های جستجوی پایگاه داده برای تعیین سریع مکان یک دستگاه تلفن همراه از طریق پرس و جوهای پایگاه داده ایستا استفاده می شود. این روشها را میتوان به سه دسته طبقهبندی کرد: روش مبتنی بر شناسه سلولی [ 19 ]، روش مبتنی بر انتقال [ 20 ، 21 ، 22 ]، و روش تعیین موقعیت اثر انگشت [ 23 ، 24 ، 25 ، 26 ، 27 ، 28. ]. با این حال، طول سلول ها و مناطق انتقال به ترتیب تقریباً 2 کیلومتر و 200 متر است و خطای مکان بستگی به اندازه سلول دارد [ 12 ، 19 ، 29]]. اگرچه تخمین مکان دقیق را می توان با روش موقعیت یابی اثر انگشت به دست آورد، قدرت محاسباتی بالاتر و هزینه تاسیس مورد نیاز است [ 30 ].
برای رفع این معایب، این مطالعه یک روش موقعیتیابی موبایل با کارایی بالا را بر اساس روش جستجوی پایگاه داده برای تعیین سریع مکان دستگاه تلفن همراه پیشنهاد میکند. علاوه بر این، این روش RSSI سلول متصل را برای افزایش دقت مکان تخمین زده در نظر می گیرد.
3. روش موقعیت یابی موبایل با راندمان بالا
یک روش موقعیتیابی موبایل با کارایی بالا برای تجزیه و تحلیل و تعیین مکان هر جفت سلول-RSSI از دادههای CVO پیشنهاد شدهاست. بخشهای فرعی زیر دو مرحله را ارائه میکنند: (1) مرحله قبل از استقرار و (2) مرحله زمان اجرا.
3.1. مرحله پیش از استقرار
در این مرحله، یک الگوریتم موقعیتیابی سیار برای بازیابی اطلاعات مکان و سیگنالهای شبکه سلولی ( به عنوان مثال ، شناسه سلولی و RSSI) دادههای تاریخی از وسایل نقلیه تجاری مجهز به GPS و تخمین مکان برای هر جفت سلول-RSSI پیشنهاد میشود. برای الزامات محاسباتی دادههای CVO حجیم، مدل برنامهنویسی MapReduce [ 31 ] و HIVE [ 32 ] در محیطهای محاسباتی ابری برای تعیین مکان سریع ساخته شدهاند.
3.1.1. داده های ورودی
داده های ورودی داده های CVO هستند. هر رکورد از دادههای CVO شامل طول و عرض جغرافیایی یک OBU، شناسه سلول متصل فعلی و RSSI سلول متصل است. هر OBU می تواند به صورت دوره ای داده های CVO ( به عنوان مثال ، طول و عرض جغرافیایی OBU، شناسه سلول متصل فعلی و RSSI سلول متصل) را هر 30 ثانیه به سرورهای CVO ارسال کند. RSSI و شناسه سلول جفت می شوند و جفت سلول-RSSI نامیده می شوند. برای مثال، شناسه سلول به عنوان 10721_47366 ارائه می شود زمانی که کد منطقه (LAC) 10721 و کد منطقه خدمات (SAC) 47366 است. جفت سلول-RSSI به عنوان 10721_47366_21 ارائه می شود زمانی که شناسه سلول 10721-2RSSI6 باشد. dBm [ 33 ].
نمادهای این تحقیق در زیر خلاصه می شود:
-
n سلول در داده های CVO وجود دارد و محدوده RSSI هر سلول بین 0 تا m dBm است. بنابراین، n × m جفت سلول-RSSI وجود دارد و همه سلولها محدوده RSSI یکسانی دارند.
-
تعداد رکوردهای جفت سلول i – RSSI به صورت r i تعریف می شود .
-
طول جغرافیایی رکورد j- امین جفت سلول-RSSI به صورت x i,j و عرض جغرافیایی رکورد j- امین سلول-RSSI به صورت y i,j تعریف می شود .
-
میانگین x i,j به صورت μx ,i تعریف می شود و میانگین y i,j به صورت μy ,i تعریف می شود .
-
انحراف استاندارد x i,j به صورت σ x,i و انحراف استاندارد y i,j به صورت σ y,i تعریف می شود .
-
پس از فیلتر کردن، تعداد رکوردهای جفت سلول i – RSSI به صورت r i تعریف می شود .
-
پس از فیلتر بیرونی، طول جغرافیایی رکورد j- امین جفت سلول i -RSSI به صورت x i,j ′ و عرض جغرافیایی رکورد j- امین سلول i -RSSI به صورت تعریف می شود. y i,j “.
-
میانگین x i,j ‘ به صورت μx ,i ‘ و میانگین y i,j ‘ به صورت μy ,i تعریف میشود .
-
طول جفت سلول i – RSSI x i به طور نرمال با میانگین μx ,i و انحراف استاندارد σx ,i توزیع شده است . تابع چگالی احتمال (PDF) توزیع نرمال آن به صورت تعریف شده است f(ایکسمن،μx ، i،σx ، i) =1σx ، i2 π√ه–(ایکسمن–μx ، i)22σx ، i2�(ایکسمن،�ایکس،من،�ایکس،من)=1�ایکس،من2�ه–(ایکسمن–�ایکس،من)22�ایکس،من2[ 33 ، 34 ].
-
عرض جغرافیایی جفت سلول i -RSSI y i به طور نرمال با میانگین μy ,i و انحراف استاندارد σy ,i توزیع شده است . PDF توزیع عادی آن به صورت تعریف شده است f(yمن،μy، من،σy، من) =1σy، من2 π√ه–(yمن–μy، من)22σy، من2�(�من،��،من،��،من)=1��،من2�ه–(�من–��،من)22��،من2[ 33 ، 34 ].
مطالعه جفت سلول-RSSI 10721_47366_21 به ارزیابی مفروضات توزیع طول و عرض جغرافیایی کمک می کند. داده های مکان تاریخی این جفت سلول-RSSI توسط سیستم CVO شرکت Chunghwa Telecom از نوامبر 2013 تا ژانویه 2014 جمع آوری شده است . . برای ارزیابی توزیع دادههای عملی و توزیع نرمال از آزمون خی دو برازش [ 26 ، 35 ، 36 ] استفاده میشود. آزمون مجذور کای این مفروضات نشان داد که χ2= 0.653 <χ211 ، 0.05= 19.675�2=0.653<�11،0.052=19.675چه زمانی α = 0.05�=0.05برای توزیع طول جغرافیایی و χ2= 0.414 <χ211 ، 0.05= 19.675�2=0.414<�11،0.052=19.675چه زمانی α = 0.05�=0.05برای توزیع عرض جغرافیایی تفاوت معنی داری مشاهده نشد، بنابراین توزیع طول و عرض جغرافیایی مشابه توزیع های نرمال بود.
3.1.2. روند
سه مرحله شامل روش موقعیت یابی متحرک به شرح زیر است: (الف) محاسبه میانگین و انحراف استاندارد. (ب) فیلتر بیرونی؛ و (ج) تعیین مکان ( شکل 2 را ببینید ).
محاسبه میانگین و انحراف استاندارد
برای محاسبه مرکز، این تحقیق از معادلات (1) و (2) برای محاسبه میانگین و انحراف معیار طول جغرافیایی و از معادلات (3) و (4) برای محاسبه میانگین و انحراف معیار عرضهای جغرافیایی استفاده میکند:
μx ، i=∑j = 1rمنایکسمن ، جrمن�ایکس،من=∑�=1�منایکسمن،��من
σx ، i=∑j = 1rمن(ایکسمن ، ج–μx ، i)2rمن– 1�ایکس،من=∑�=1�من(ایکسمن،�–�ایکس،من)2�من–1
μy، من=∑j = 1rمنyمن ، جrمن��،من=∑�=1�من�من،��من
σy، من=∑j = 1rمن(yمن ، ج–μy، من)2rمن– 1��،من=∑�=1�من(�من،�–��،من)2�من–1
فیلتر بیرونی
این مرحله یک مکانیسم فیلتر بیرونی را برای پاک کردن داده های تاریخی CVO برای تعیین دقیق اطلاعات مکان انجام می دهد. این مکانیسم از آستانه t استفاده می کند که به عنوان یک معیار فیلتر بیرونی تعریف شده است. مقدار t را می توان با توجه به انحرافات استاندارد σ x,i و σ y,i تنظیم کرد . طول جغرافیایی رکورد x i ,j زمانی که کوچکتر از μx ,i -t یا بزرگتر از μx ,i + t باشد فیلتر می شود . رکوردهای عرض جغرافیایی y i,j را می توان با همان آستانه t فیلتر کرد.
تعیین مکان
پس از فیلتر کردن، میانگین طول و عرض جغرافیایی هر رکورد به ترتیب با معادلات (5) و (6) محاسبه می شود. این روش طول و عرض جغرافیایی جفت سلول i -RSSI را به صورت μx ,i ‘ و μy ,i ‘ تعیین می کند:
μx ، i‘ =∑j = 1rمن‘ایکسمن ، ج‘rمن‘، کجا μx ، i− t <ایکسمن ، ج‘ <μx ، i+ تی�ایکس،من“=∑�=1�من“ایکسمن،�“�من“،جایی که �ایکس،من–تی<ایکسمن،�“<�ایکس،من+تی
μy، من‘ =∑j = 1rمن‘yمن ، ج‘rمن‘، کجا μy، من− t <yمن ، ج‘ <μy، من+ تی��،من“=∑�=1�من“�من،�“�من“،جایی که ��،من–تی<�من،�“<��،من+تی
در این مراحل، میانگین و انحرافات استاندارد را می توان با استفاده از محاسبات ابری (به عنوان مثال، مدل برنامه نویسی MapReduce) محاسبه کرد. کلید جفت سلول-RSSI است و مقادیر طول و عرض جغرافیایی هستند. مدل برنامه نویسی MapReduce را می توان برای محاسبات مرکز پیاده سازی کرد.
3.1.3. داده های خروجی
محل هر جفت سلول-RSSI خروجی الگوریتم موقعیت یابی موبایل است. این اطلاعات را می توان در مرحله قبل از استقرار محاسبه کرد و در یک پایگاه داده محاسبات ابری برای مرحله اجرا ذخیره کرد. تکنیک HBase [ 31 ] برای پیاده سازی این پایگاه داده رایانش ابری و تکنیک HIVE [ 32 ] برای انجام عملیات پایگاه داده رایانش ابری استفاده می شود.
3.2. مرحله اجرا
در این مرحله، زمانی که GPS در دسترس نباشد، شناسه سلول متصل و RSSI OBU توسط سرور CVO قابل بازیابی است. جفت سلول-RSSI بهدستآمده با شناسه سلول و RSSI برای پرسوجو از پایگاه داده ابری پیش از استقرار برای تعیین مکان در زمان واقعی استفاده میشود.
4. مدل های تحلیلی با معیارهای مختلف فیلتر بیرونی
این بخش یک مدل تحلیلی را پیشنهاد میکند و نتایج عددی را برای تجزیه و تحلیل امکانسنجی روش موقعیتیابی موبایل پیشنهادی با معیارهای مختلف فیلتر بیرونی ارائه میکند.
4.1. مدل های تحلیلی
این بخش مدلهایی را برای تجزیه و تحلیل روابط خطای مکان و دسترسی به آستانههای مختلف فیلتر بیرونی پیشنهاد میکند .
4.1.1. خطای مکان
فرض می شود که مکان های همان جفت سلول-RSSI به طور نرمال توزیع شده اند، و محدوده های مورد انتظار طول و عرض جغرافیایی جفت سلول i -RSSI به صورت d x ، i و d y ، i تعریف می شوند (به معادلات مراجعه کنید 7) و (8)). خطاهای مکان ممکن است مطابق با این محدوده ها ایجاد شوند:
دx ، i=🔻μx ، i+ تیμx ، i– تی|ایکسمن–μx ، i| f(ایکسمن،μx ، i،σx ، i) دایکسمن، جایی که f(ایکسمن،μx ، i،σx ، i) =1σx ، i2 π√ه–(ایکسمن–μx ، i)22σx ، i2 =🔻μx ، i+ تیμx ، i(ایکسمن–μx ، i)⎛⎝⎜⎜1σx ، i2 π––√ه–(ایکسمن–μx ، i)22σx ، i2⎞⎠⎟⎟دx + 🔻μx ، iμx ، i– تی(μx ، i–ایکسمن)⎛⎝⎜⎜1σx ، i2 π––√ه–(ایکسمن–μx ، i)22σx ، i2⎞⎠⎟⎟دایکس =2σx ، i⎛⎝⎜⎜⎜1- _ه–تی22σx ، i2⎞⎠⎟⎟⎟2 π√دایکس،من=🔻�ایکس،من–تی�ایکس،من+تی|ایکسمن–�ایکس،من|�(ایکسمن،�ایکس،من،�ایکس،من)دایکسمن، جایی که �(ایکسمن،�ایکس،من،�ایکس،من)=1�ایکس،من2�ه–(ایکسمن–�ایکس،من)22�ایکس،من2 =🔻�ایکس،من�ایکس،من+تی(ایکسمن–�ایکس،من)(1�ایکس،من2�ه–(ایکسمن–�ایکس،من)22�ایکس،من2)دایکس+ 🔻�ایکس،من–تی�ایکس،من(�ایکس،من–ایکسمن)(1�ایکس،من2�ه–(ایکسمن–�ایکس،من)22�ایکس،من2)دایکس =2�ایکس،من(1–ه–تی22�ایکس،من2)2�
دy، من=🔻μy، من+ تیμy، من– تی|yمن–μy، من| f(yمن،μy، من،σy، من) دyمن، جایی که f(yمن،μy، من،σy، من) =1σy، من2 π√ه–(yمن–μy، من)22σy، من2 =🔻μy، من+ تیμy، من(yمن–μy، من)⎛⎝⎜⎜1σy، من2 π––√ه–(yمن–μy، من)22σy، من2⎞⎠⎟⎟دy+ 🔻μy، منμy، من– تی(μy، من–yمن)⎛⎝⎜⎜1σy، من2 π––√ه–(yمن–μy، من)22σy، من2⎞⎠⎟⎟دy =2σy، من⎛⎝⎜⎜⎜1- _ه–تی22σy، من2⎞⎠⎟⎟⎟2 π√د�،من=🔻��،من–تی��،من+تی|�من–��،من|�(�من،��،من،��،من)د�من،جایی که �(�من،��،من،��،من)=1��،من2�ه–(�من–��،من)22��،من2 =🔻��،من��،من+تی(�من–��،من)(1��،من2�ه–(�من–��،من)22��،من2)د�+ 🔻��،من–تی��،من(��،من–�من)(1��،من2�ه–(�من–��،من)22��،من2)د� =2��،من(1–ه–تی22��،من2)2�
4.1.2. دسترسی
مکان های همان جفت سلول-RSSI به طور معمول توزیع شده اند، و در دسترس بودن جفت سلول- RSSI به صورت px، i و py، i تعریف می شود ( معادلات ( 9 ) و ( 10 ) را ببینید . ). تابع g ( z ) در معادلات (9) و (10) یک تابع خطای گاوسی است که می تواند به صورت سری تیلور بیان شود [ 37 ] 2π√∑∞n = 0z2 n + 1∏nk = 1–z2ک2�∑�=0∞�2�+1∏ک=1�–�2کs [ 33 ]:
پx ، i=🔻μx ، i+ تیμx ، i– تیf(ایکسمن،μx ، i،σx ، i) دایکسمن، جایی که f(ایکسمن،μx ، i،σx ، i) =1σx ، i2 π√ه–(ایکسمن–μx ، i)22σx ، i2 = g(تی2√σx ، i) ،جایی که g( z) =2π√∑n = 0∞z2 n + 1∏k = 1n–z2ک =2π√∑n = 0∞تی2√σx ، i2 n + 1∏k = 1n–تی2√σx ، i2کپایکس،من=🔻�ایکس،من–تی�ایکس،من+تی�(ایکسمن،�ایکس،من،�ایکس،من)دایکسمن، جایی که �(ایکسمن،�ایکس،من،�ایکس،من) =1�ایکس،من2�ه–(ایکسمن–�ایکس،من)22�ایکس،من2 =�(تی2�ایکس،من)،جایی که �(�)=2�∑�=0∞�2�+1∏ک=1�–�2ک =2�∑�=0∞تی2�ایکس،من2�+1∏ک=1�–تی2�ایکس،من2ک
پy، من=🔻μy، من+ تیμy، من– تیf(yمن،μy، من،σy، من) دyمن، جایی که f(yمن،μy، من،σy، من) =1σy، من2 π√ه–(yمن–μy، من)22σy، من2 = g(تی2√σy، من) ،جایی که g( z) =2π√∑n = 0∞z2 n + 1∏k = 1n–z2ک =2π√∑n = 0∞تی2√σy، من2 n + 1∏k = 1n–تی2√σy، من2کپ�،من=🔻��،من–تی��،من+تی�(�من،��،من،��،من)د�من، جایی که �(�من،��،من،��،من) =1��،من2�ه–(�من–��،من)22��،من2 =�(تی2��،من)،جایی که �(�)=2�∑�=0∞�2�+1∏ک=1�–�2ک =2�∑�=0∞تی2��،من2�+1∏ک=1�–تی2��،من2ک
4.2. آنالیزهای عددی
برای نشان دادن مدل تحلیلی پیشنهادی، پارامترهای زیر برای تخمین محدوده مورد انتظار طول و عرض جغرافیایی جفت سلول i-RSSI به کار گرفته شد: μx , i = 120.3259728, μy ,i = 22.56716916، σx ,i. = 0.001271737، σ y،i = 0.000940652. شکل 3 محدوده مورد انتظار طول جغرافیایی را با آستانه های مختلف فیلتر بیرونی نشان می دهد . محدوده مورد انتظار تقریباً 0.001003427 است ( یعنی 103.03 متر ) زمانی که t = 3 × σ x,i ( یعنی t= 0.003815211). علاوه بر این، محدوده مورد انتظار است 2σx ، i2 π√= 0.0010146992�ایکس،من2�=0.001014699( یعنی 104.19 متر) وقتی t = ∞. بنابراین، بهبود تعیین مکان 1.16 متر پس از فیلتر بیرونی با t = 3 × σ x,i است . با این حال، زمانی که آستانه فیلتر بیرونی t کاهش یابد، در دسترس بودن p x ، i کاهش می یابد . بنابراین، بین خطای مکان و در دسترس بودن یک معامله وجود دارد.
شکل 4 محدوده های مورد انتظار عرض جغرافیایی را با آستانه های مختلف فیلتر بیرونی نشان می دهد . محدوده مورد انتظار تقریباً 0.000742194 است ( یعنی 82.53 متر) زمانی که t = 3 × σ y ,i ( یعنی t = 0.002821957) و 2σy، من2 π√= 0.0007505322��،من2�=0.000750532( یعنی 83.46 متر) وقتی t = ∞. بنابراین، تعیین موقعیت جغرافیایی به 0.97 متر پس از فیلتر بیرونی با t = 3 × σ y,i بهبود می یابد .
5. پیاده سازی و ارزیابی سیستم عملیاتی خودروهای تجاری
در این بخش، معماری یک سیستم CVO پیشنهاد و پیادهسازی میشود و نتایج عملی تجربی از سیستم CVO با روشهای مختلف تعیین مکان برای ارزیابی روش موقعیتیابی سیار پیشنهادی مقایسه میشود [33 ] .
5.1. سیستم CVO
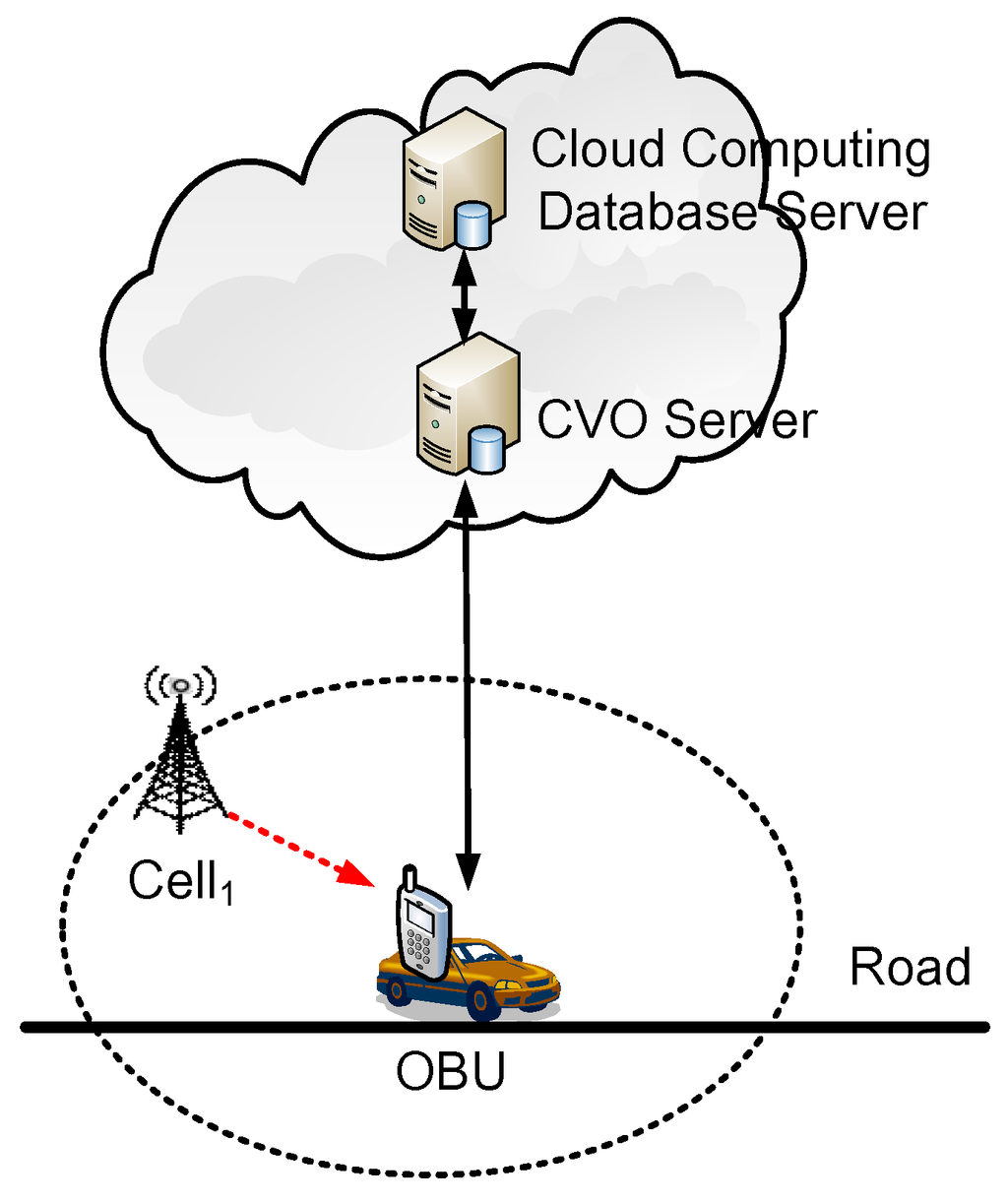
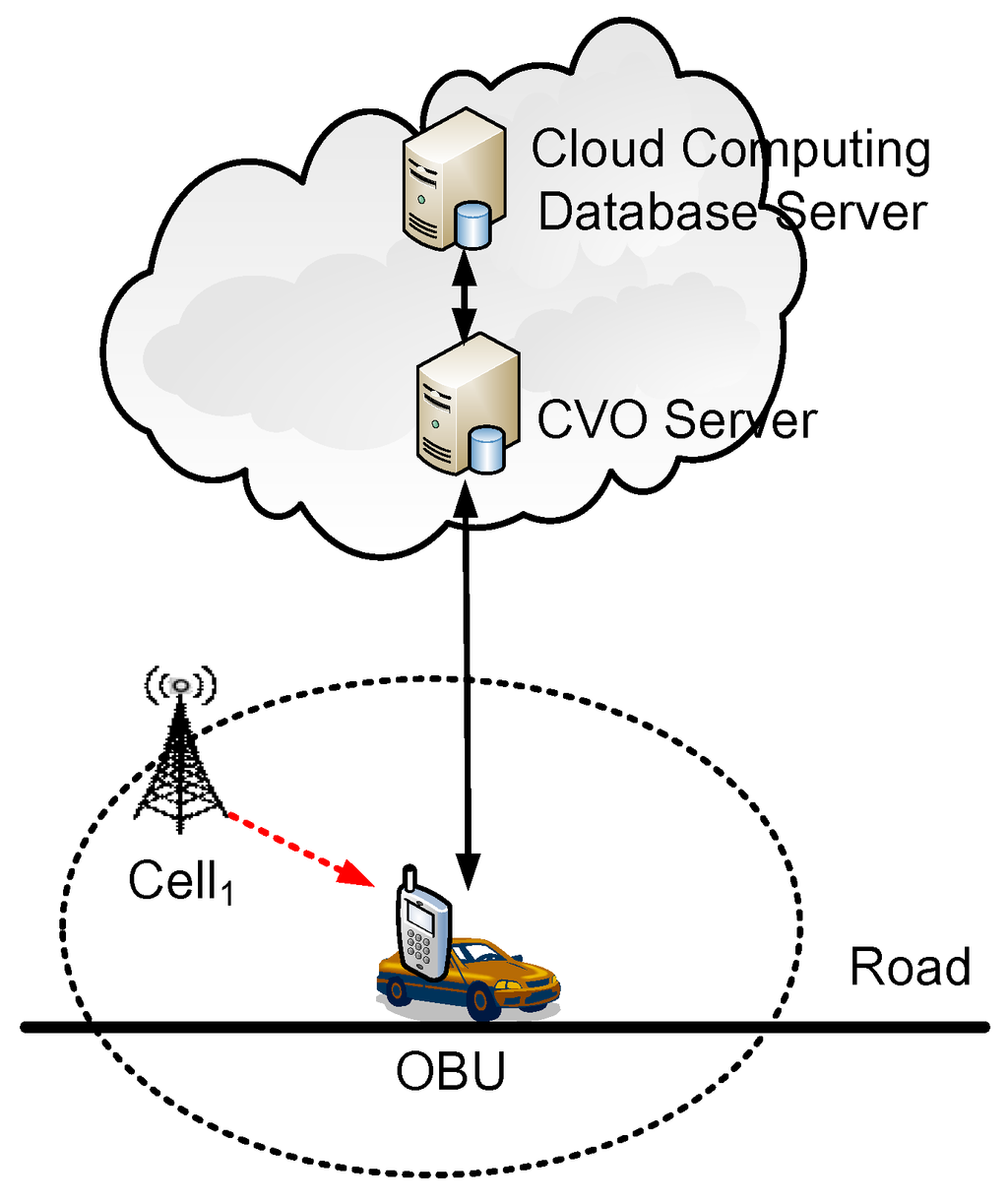
این بخش فرعی یک سیستم CVO متشکل از OBU، یک سرور CVO و یک سرور پایگاه داده محاسبات ابری (نشان داده شده در شکل 5 ) را پیشنهاد می کند.
یک گیرنده GPS و یک ماژول شبکه سلولی را می توان در هر OBU برای انتقال دوره ای اطلاعات مکان ( به عنوان مثال ، طول و عرض جغرافیایی) تعیین شده از GPS و سیگنال های شبکه سلولی ( یعنی شناسه و RSSI سلول متصل) به سرور CVO مجهز کرد. وقتی GPS در دسترس نباشد، OBU فقط سیگنال های شبکه سلولی را ارسال می کند که به صورت جفت سلول-RSSI ارائه می شوند. سرور CVO میتواند روش موقعیتیابی موبایل پیشنهادی را با استفاده از جفت سلول-RSSI به عنوان کلید انجام دهد و پایگاه داده محاسبات ابری پیش از استقرار را براساس Hadoop [31]، MapReduce [ 31 ] و Hive [ 32] جستجو کند.] تکنیک. سپس مکان مربوط به جفت سلول-RSSI را می توان برای تعیین مکان OBU بازیابی کرد.
5.2. نتایج تجربی و بحث
این بخش فرعی یک مطالعه موردی را ارائه میکند و دادههای سه ماهه CVO را برای ارزیابی روش موقعیتیابی موبایل پیشنهادی تجزیه و تحلیل میکند. از نوامبر 2013 تا ژانویه 2014، 67 OBU در محیط های آزمایشی هدایت شد و 18508 سلول مختلف شناسایی و متصل شدند. این OBU ها 6,571,550 رکورد CVO را به دست آوردند و آنها را برای تجزیه و تحلیل اطلاعات مکان و سیگنال های شبکه سلولی به سرور CVO ارسال کردند.
5.2.1. مطالعه موردی
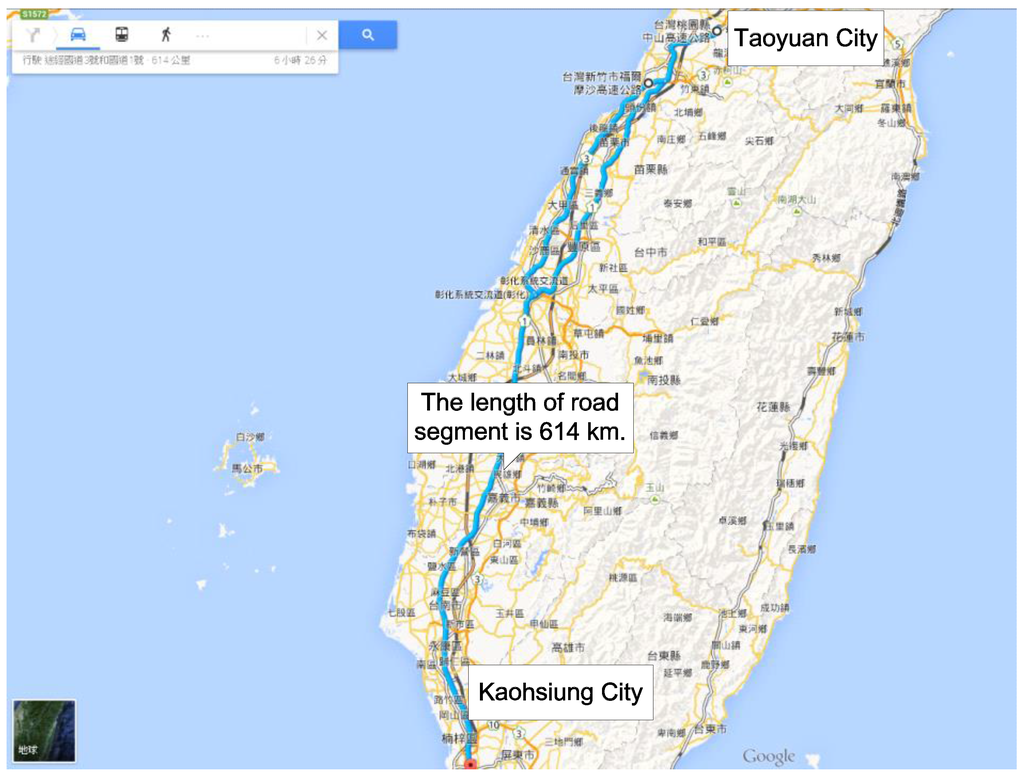
یک OBU در 23 نوامبر 2013 به عنوان مطالعه موردی برای ارائه نتایج روش پیشنهادی موقعیتیابی موبایل انتخاب شد. این آزمایش ها در یک قطعه بزرگراه به طول 614 کیلومتر بین Kaohsiung و Taoyuan در تایوان انجام شد (در شکل 6 نشان داده شده است ).
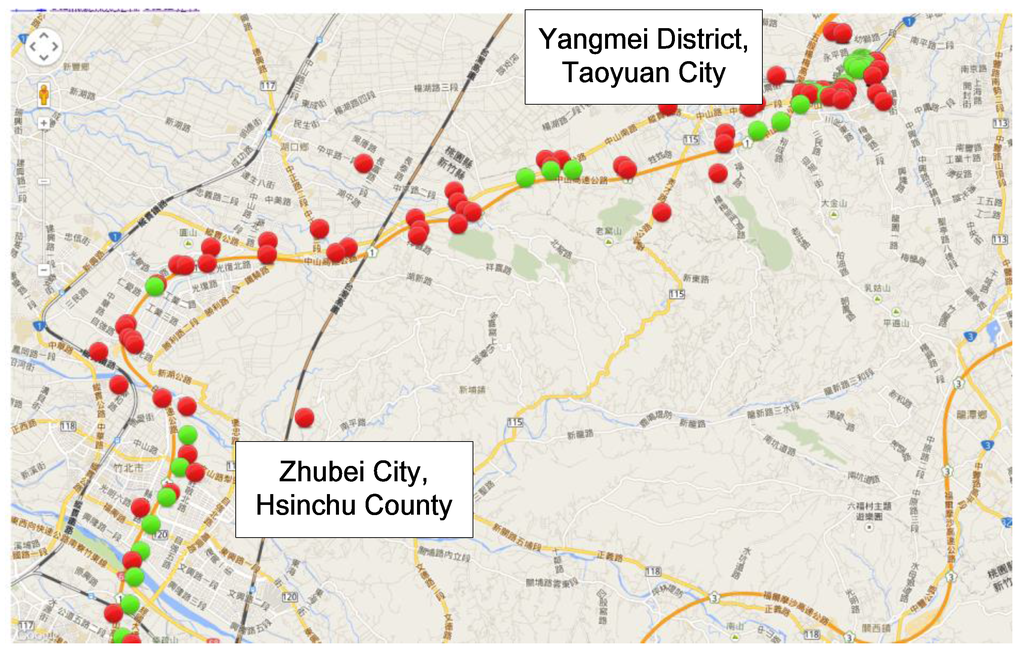
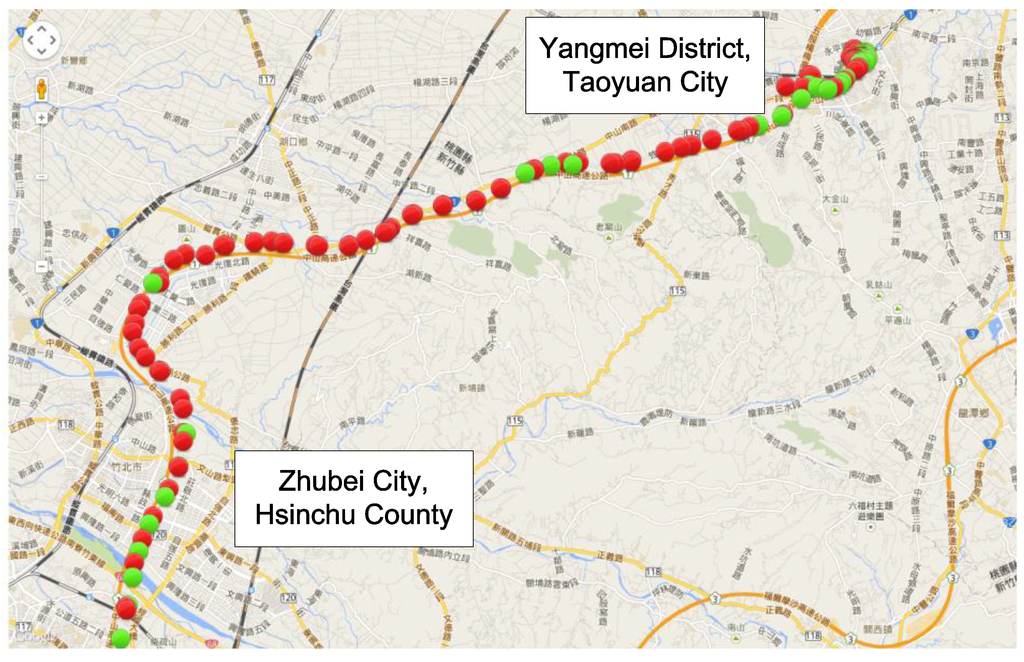
شکل 7 و شکل 8 اطلاعات مکان OBU را با روش های مختلف موقعیت یابی نشان می دهد. مکان نقطه سبز توسط GPS تعیین شد. نقاط قرمز با روش های موقعیت یابی متحرک تعیین شد. در این موارد سیگنال های ماهواره GPS ضعیف بود. بسیاری از مکان های تعیین شده با روش موقعیت یابی مبتنی بر شناسه سلولی [ 9 ] به درستی در بخش جاده در شکل 7 نیستند . نتایج نشان می دهد که روش موقعیت یابی مبتنی بر شناسه سلولی نمی تواند اطلاعات مکان دقیقی را ارائه دهد. با این حال، شکل 8 نشان می دهد که مکان های تعیین شده با استفاده از روش موقعیت یابی پیشنهادی متناسب با بخش جاده هستند. بنابراین، روش موقعیتیابی پیشنهادی نسبت به موقعیتیابی مبتنی بر شناسه سلولی مناسبتر است.
5.2.2. ارزیابی و بحث
نتایج عملی استفاده از روش پیشنهادی موقعیتیابی موبایلی در این بخش نشان داده و ارزیابی میشود. در این مطالعه، داده های CVO از اکتبر 2013 تا ژانویه 2014 برای ارزیابی جمع آوری شد. داده های اکتبر 2013 به عنوان داده های آموزشی و داده های نوامبر 2013 تا ژانویه 2014 به عنوان داده های آزمایشی مورد استفاده قرار گرفت.
برای تجزیه و تحلیل ردیابی های OBU، جدول 1 نتایج عملی تعیین مکان را با روش های مختلف موقعیت یابی ( به عنوان مثال ، GPS، روش مبتنی بر شناسه سلولی، و روش پیشنهادی) در 23 نوامبر 2013 نشان می دهد. اطلاعات مکان به دست آمده از یک گیرنده GPS به عنوان داده های پایه تعریف شد. در این مورد، در دسترس بودن GPS تنها تقریباً 6.31٪ بود، بنابراین 93.69٪ از کل رکوردها فاقد اطلاعات مکان GPS هستند. این مطالعه اطلاعات مکان را با استفاده از روشهای موقعیتیابی موبایل و GPS در زمانی که GPS در دسترس بود، مقایسه کرد. روش موقعیت یابی مبتنی بر شناسه سلولی [ 9] برای اجرا و ارزیابی در نظر گرفته شد و خطاهای تعیین مکان و در دسترس بودن به ترتیب تقریباً 2/521 متر و 51/99 درصد بود. در نهایت، این مطالعه روش پیشنهادی موقعیتیابی سیار را اجرا و ارزیابی کرد و خطاهای تعیین مکان و در دسترس بودن به ترتیب تقریباً 163.7 متر و 99.58 درصد بود. CDF خطاهای مکان در این مورد در شکل 9 نشان داده شده است . در مورد دیگری، جدول 2 و شکل 10مقایسه روش های مختلف موقعیت یابی در 4 دسامبر 2013. نتایج نشان می دهد که در دسترس بودن روش مبتنی بر شناسه سلولی و روش پیشنهادی به ترتیب 50/72 و 49/99 درصد است. این نتایج نشان می دهد که روش موقعیت یابی موبایل پیشنهادی می تواند اطلاعات مکان دقیق را ارائه دهد و برای CVO مناسب است.
این مطالعه روش پیشنهادی را برای شش نوع جاده تعریف شده در [ 38 ] (بزرگراه ملی، بزرگراه استانی، جاده شهری، جاده شهرستانی، جاده روستایی و کوچه) ارزیابی می کند. از نوامبر 2013 تا ژانویه 2014، 6,571,550 رکورد جمع آوری شد و نسبت رکوردها برای هر نوع جاده در جدول 3 محاسبه شد . از آنجایی که وسایل نقلیه تجاری معمولاً در بزرگراه های ملی و جاده های شهری رانده می شوند، نسبت بزرگراه های ملی و جاده های شهری به ترتیب 470/36 و 639/42 درصد است. جدول 4 و جدول 5تجزیه و تحلیل میانگین خطای مکان و نرخ در دسترس بودن را با استفاده از روش های مختلف تعیین مکان نشان می دهد. نتایج تجربی عملی نشان می دهد که میانگین خطای مکان با استفاده از روش پیشنهادی کمتر از استفاده از روش موقعیت یابی مبتنی بر شناسه سلولی است ( شکل 11 ). روش پیشنهادی اطلاعات مکان دقیق تری را برای هر نوع جاده به دست آورد. علاوه بر این، زمانی که GPS در دسترس نباشد، روش پیشنهادی با نرخ در دسترس بودن بالاتر می تواند برای تعیین مکان وسایل نقلیه تجاری برای هر نوع جاده، به ویژه جاده های شهری استفاده شود.
6. نتیجه گیری
یک روش موقعیتیابی موبایل با کارایی بالا برای جمعآوری و تجزیه و تحلیل سیگنالهای شبکه سلولی دادههای CVO پیشنهاد شدهاست. محاسبات موازی و تکنیکهای محاسبات ابری در روش موقعیتیابی موبایل پیشنهادی طراحی شدهاند تا به سرعت مکان یک OBU برای CVO را تعیین کنند. علاوه بر این، این مطالعه مدلهای تحلیلی را برای تجزیه و تحلیل در دسترس بودن روش موقعیتیابی موبایل پیشنهادی با معیارهای مختلف فیلتر بیرونی پیشنهاد میکند. در محیطهای آزمایشی، یک سیستم CVO برای جمعآوری دادههای CVO از Chunghwa Telecom و تجزیه و تحلیل سیگنالهای شبکه سلولی دادههای CVO برای تعیین مکان طراحی و اجرا شد. یک مطالعه موردی مشخص کرد که میانگین خطاهای مکان با استفاده از روش پیشنهادی و روش سنتی مبتنی بر شناسه سلولی به ترتیب 163.7 متر و 521.2 متر بود. علاوه بر این، نتایج عملی نشان میدهد که میانگین خطای مکان و در دسترس بودن استفاده از روش پیشنهادی بهتر از استفاده از GPS و روش مبتنی بر شناسه سلولی برای هر نوع جاده، بهویژه جادههای شهری است. بنابراین، این رویکرد برای تعیین محل یک OBU برای بهبود CVO امکان پذیر است.
در کارهای آینده، سیگنال های سلول های همسایه را می توان به طور همزمان برای بهبود موقعیت یابی موبایل تجزیه و تحلیل کرد. علاوه بر این، روش پیشنهادی برای تولید اطلاعات مکان دقیق را می توان برای پشتیبانی از سایر برنامه های کاربردی ITS (به عنوان مثال، خدمات حمل و نقل عمومی پیشرفته، خدمات پیشرفته اطلاعات ترافیک و غیره ) به کار برد.
منابع
- Hsu، CL; Lin, JCC مطالعه رفتار پذیرش برای سیستم های ناوبری GPS درون خودرو. بین المللی جی. موب. اشتراک. 2010 ، 8 ، 603-624. [ Google Scholar ] [ CrossRef ]
- لیو، LMNY؛ Lau، YC; Patil، AP LANDMARC: سنجش مکان داخلی با استفاده از RFID فعال. سیم. شبکه 2004 ، 10 ، 701-710. [ Google Scholar ]
- ژو، اس. پولارد، JK اندازه گیری موقعیت با استفاده از بلوتوث. IEEE Trans. مصرف کنید. الکترون. 2006 ، 52 ، 555-558. [ Google Scholar ] [ CrossRef ]
- روس، تی. میلیمکی، پ. تیری، اچ. Misikangas، P. Sievanan, J. یک رویکرد احتمالی برای تخمین مکان کاربر WLAN. بین المللی جی. وایرل. Inf. شبکه 2002 ، 9 ، 155-164. [ Google Scholar ] [ CrossRef ]
- یوسف، م. Agrawala، A. سیستم تعیین مکان WLAN Horus. در مجموعه مقالات سومین کنفرانس بین المللی سیستم های تلفن همراه، برنامه ها و خدمات، سیاتل، واشنگتن، دی سی، ایالات متحده آمریکا، 6-8 ژوئن 2005. ص 205-218.
- Chiou، YS; وانگ، CL; بله، SC برآوردگر مکان تطبیقی با استفاده از الگوریتم های ردیابی برای WLAN های داخلی. سیم. شبکه 2010 ، 16 ، 1987–2012. [ Google Scholar ] [ CrossRef ]
- گوارنیری، آ. پیروتی، اف. Vettore, A. سنسورهای MEMS کم هزینه و سیستم بینایی برای تخمین حرکت و موقعیت یک اسکوتر. سنسورها 2013 ، 13 ، 1510-1522. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سندیز، ا. اورتولان، جی. Bertinato، M. شبکه های حسگر بی سیم با چگالی کم برای محلی سازی و ردیابی در محیط های بحرانی. IEEE Trans. وه تکنولوژی 2010 ، 59 ، 2951-2962. [ Google Scholar ] [ CrossRef ]
- 3GPP. گروه مشخصات فنی (TSG) خدمات و جنبه های سیستم ; TS 22.071; 3GPP: Valbonne، فرانسه، 2015. [ Google Scholar ]
- لیو، اچ. دارابی، ح. بانرجی، پ. لیو، جی. بررسی تکنیکها و سیستمهای موقعیتیابی داخلی بیسیم. IEEE Trans. سیستم مرد سایبرن. 2007 ، 37 ، 1067-1080. [ Google Scholar ] [ CrossRef ]
- Open Mobile Alliance: Secure User Plane Location V2.0 Release Enabler. در دسترس به صورت آنلاین: http://member.openmobilealliance.org/ftp/Public_documents/LOC/Permanent_documents/OMA-ERP-SUPL-V2_0-20080627-C.zip (در 26 مارس 2016 قابل دسترسی است).
- ونکاتاچلام، م. اعتماد، ک. بالانتاین، دبلیو. Chen, B. خدمات مکان یابی در شبکه های وایمکس. IEEE Commun. Mag. 2009 ، 47 ، 92-98. [ Google Scholar ] [ CrossRef ]
- کنگ، ال. Zhuang، W. Hybrid TDOA/AOA مکان کاربر تلفن همراه برای سیستم های سلولی CDMA باند پهن. IEEE Trans. سیم. اشتراک. 2002 ، 1 ، 439-447. [ Google Scholar ] [ CrossRef ]
- چی، ی. کوبایاشی، ح. سودا، H. تجزیه و تحلیل موقعیت جغرافیایی بی سیم در یک محیط غیر خط دید. IEEE Trans. سیم. اشتراک. 2006 ، 5 ، 672-681. [ Google Scholar ]
- نیکولسکو، دی. Nath، B. Ad Hoc Positioning System (APS) با استفاده از AOA. در مجموعه مقالات IEEE INFOCOM بیست و دومین کنفرانس مشترک سالانه کامپیوتر و ارتباطات IEEE، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 30 مارس تا 3 آوریل 2003. صفحات 1734-1743.
- ادلسی، م. کورون، آر. هاجز، اس. نیومن، جی. استگلز، پی. وارد، ا. هاپر، A. پیاده سازی یک سیستم محاسباتی حساس. کامپیوتر 2001 ، 34 ، 50-56. [ Google Scholar ] [ CrossRef ]
- ساوویدس، ا. Han, CC; استریواستاوا، MB پویا محلی سازی ریز دانه در شبکه های موقت حسگرها. در مجموعه مقالات کنفرانس بین المللی ACM/IEEE MOBICOM در مورد محاسبات موبایلی و شبکه، رم، ایتالیا، 16-21 ژوئیه 2001. صص 166-179.
- بشارا، م. ارگونر، یو. گوستافسون، اف. Biesen، محلیسازی اثر انگشت LV در شبکههای بیسیم بر اساس اندازهگیریهای قدرت سیگنال دریافتی: مطالعه موردی در شبکههای وایمکس. IEEE Trans. وه تکنولوژی 2010 ، 59 ، 283-294. [ Google Scholar ] [ CrossRef ]
- بشارا، م. ارگونر، یو. گوستافسون، اف. Biesen، LV ردیابی قوی در شبکه های سلولی با استفاده از فیلترهای HMM و اندازه گیری cell-ID. IEEE Trans. وه تکنولوژی 2011 ، 60 ، 1016-1024. [ Google Scholar ] [ CrossRef ]
- چانگ، ام.اف. چن، CH; لین، YB؛ Chia، CY فراوانی گزارش سرعت CFVD برای ترافیک بزرگراه. سیم. اشتراک. اوباش محاسبه کنید. 2015 ، 15 ، 879-888. [ Google Scholar ] [ CrossRef ]
- گوندلگارد، دی. دقت مکان کارلسون، JM Handover برای تخمین زمان سفر در GSM و UMTS. IET Intel. ترانسپ سیستم 2009 ، 3 ، 87-94. [ Google Scholar ] [ CrossRef ]
- پیک، جی. کیم، KH; سینگ، جی پی؛ Govindan، R. موقعیت یابی انرژی کارآمد برای تلفن های هوشمند با استفاده از تطبیق توالی Cell-ID. در مجموعه مقالات نهمین کنفرانس بین المللی سیستم های تلفن همراه، برنامه ها و خدمات، Bethesda، MD، ایالات متحده آمریکا، 28 ژوئن تا 1 ژوئیه 2011. صص 293-306.
- چن، CH; لین، BY; Lin, CH; لیو، YS; Lo, CC یک الگوریتم موقعیت یابی سبز برای سیستم هدایت دانشگاه. بین المللی جی. موب. اشتراک. 2012 ، 10 ، 119-131. [ Google Scholar ] [ CrossRef ]
- لین، BY; چن، CH; Lo, CC یک روش جدید تخمین سرعت با استفاده از رویدادهای سرویس مکان براساس موقعیتیابی اثر انگشت. Adv. علمی Lett. 2011 ، 4 ، 3735-3739. [ Google Scholar ] [ CrossRef ]
- چن، CH; Lo, CC; Lin, HF تجزیه و تحلیل نرخ های گزارش سرعت از یک شبکه سلولی بر اساس الگوریتم موقعیت یابی اثر انگشت. اس افر. J. Ind. Eng. 2013 ، 24 ، 98-106. [ Google Scholar ] [ CrossRef ]
- چن، CH; لین، BY; چانگ، HC; Lo, CC الگوریتم موقعیت یابی جدید مبتنی بر محاسبات ابری – مطالعه موردی سیستم های حمل و نقل هوشمند. اطلاعات 2012 ، 15 ، 4519-4524. [ Google Scholar ]
- چنگ، دی. چن، CH; Hsiang، CH; Lo, CC; لین، HF; Lin, BY دوره نمونه برداری بهینه از الگوریتم موقعیت یابی اثر انگشت برای تخمین سرعت خودرو. ریاضی. پروب مهندس 2013 ، 2013 ، 1-12. [ Google Scholar ] [ CrossRef ]
- Wigren، T. تطبیقی، بومی سازی اثرانگشت شناسه سلولی را با خوشه بندی اندازه گیری های موقعیت دقیق بهبود بخشید. IEEE Trans. وه تکنولوژی 2007 ، 56 ، 3199-3209. [ Google Scholar ] [ CrossRef ]
- Kuo، SP; Lin, SC; وو، بی جی; Tseng، YC; Shen, CC GeoAds: یک معماری میانافزار برای سرویس موسیقی با آگهیهای آگاه از مکان. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد سیستم های حسگر و Ad-hoc موبایل، پیزا، ایتالیا، 8 تا 11 اکتبر 2007.
- روشهای تخمین اطلاعات ترافیک چن، CH بر اساس دادههای شبکه سلولی. دکتری پایان نامه، گروه مدیریت اطلاعات و امور مالی، دانشگاه ملی چیائو تونگ، هسینچو، تایوان، 2013. [ Google Scholar ]
- Apache Software Fundation، Apache Hadoop 2.3.0. 2015. در دسترس آنلاین: http://hadoop.apache.org/ (دسترسی در 26 مارس 2016).
- Apache Software Fundation، Apache Hive 0.12.0. 2015. در دسترس آنلاین: http://hive.apache.org/ (در 26 مارس 2016 قابل دسترسی است).
- چن، CH; لین، جی اچ. Kuan، TS; Lo, KR یک سیستم موقعیت یابی تلفن همراه با کارایی بالا با استفاده از داده های عملیات خودروهای تجاری بر اساس تکنیک های محاسبات ابری. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد اینترنت اشیا، تایپه، تایوان، 1 تا 3 سپتامبر 2014.
- چن، CH; لین، سی. چانگ، HC; Lo, CC در مورد طراحی و توسعه یک سیستم جدید تخمین قیمت معاملات در زمان واقعی. Adv. ماتر Res. 2011 ، 393-395 ، 213-216. [ Google Scholar ] [ CrossRef ]
- لوین، دی. کرهبیل، TC; Berenson, ML Basic Business Statistics: Concepts and Applications , 10th ed.; تحصیلات پیرسون: نیویورک، نیویورک، ایالات متحده آمریکا، 2005. [ Google Scholar ]
- چن، CH; لین، HF; چانگ، HC; هو، PH; Lo, CC چارچوبی تحلیلی از یک استراتژی استقرار برای خدمات رایانش ابری: مطالعه موردی وب سایت های دانشگاهی. ریاضی. پروب مهندس 2013 ، 2013 ، 1-14. [ Google Scholar ] [ CrossRef ]
- ویکی پدیا، عملکرد خطا. 2015. در دسترس آنلاین: http://en.wikipedia.org/wiki/Error_function (در 26 مارس 2016 قابل دسترسی است).
- وزارت دادگستری جمهوری چین، قانون بزرگراه. 2015. در دسترس آنلاین: http://law.moj.gov.tw/LawClass/LawAll.aspx?PCode=K0040001 (در 26 مارس 2016 قابل دسترسی است).
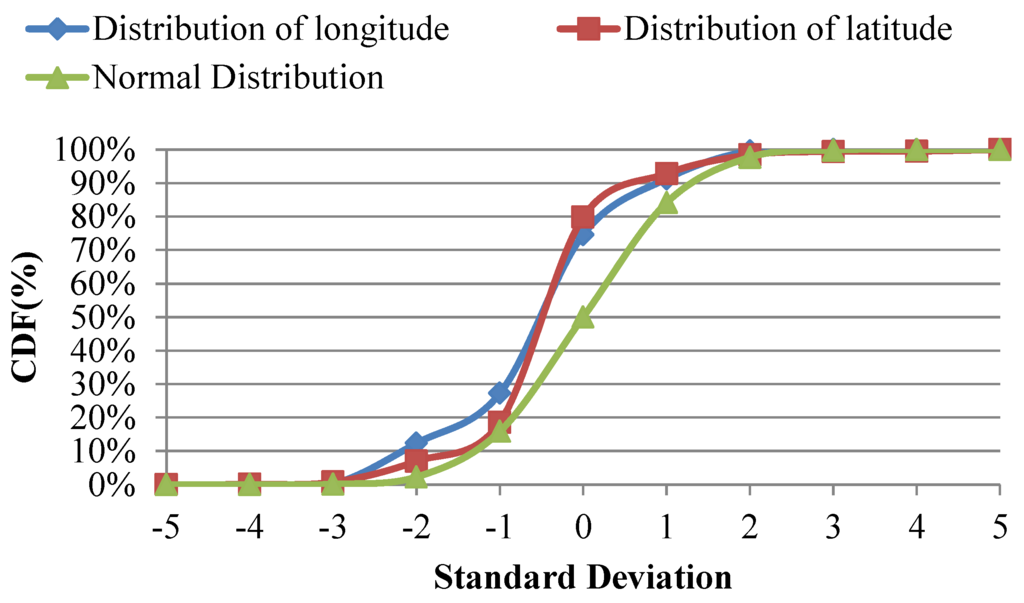
شکل 1. توزیع طول و عرض جغرافیایی.
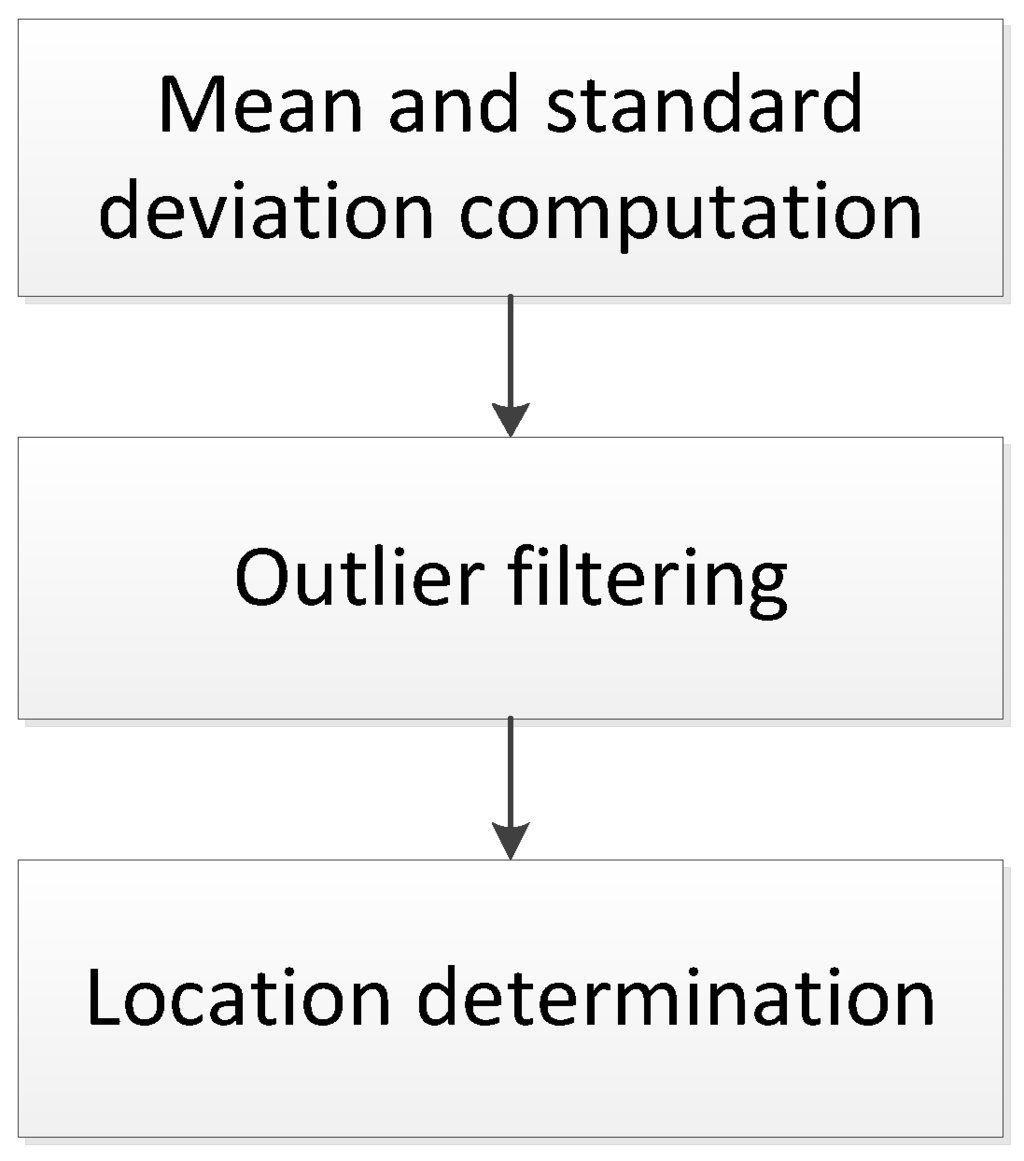
شکل 2. مراحل روش موقعیت یابی موبایل.
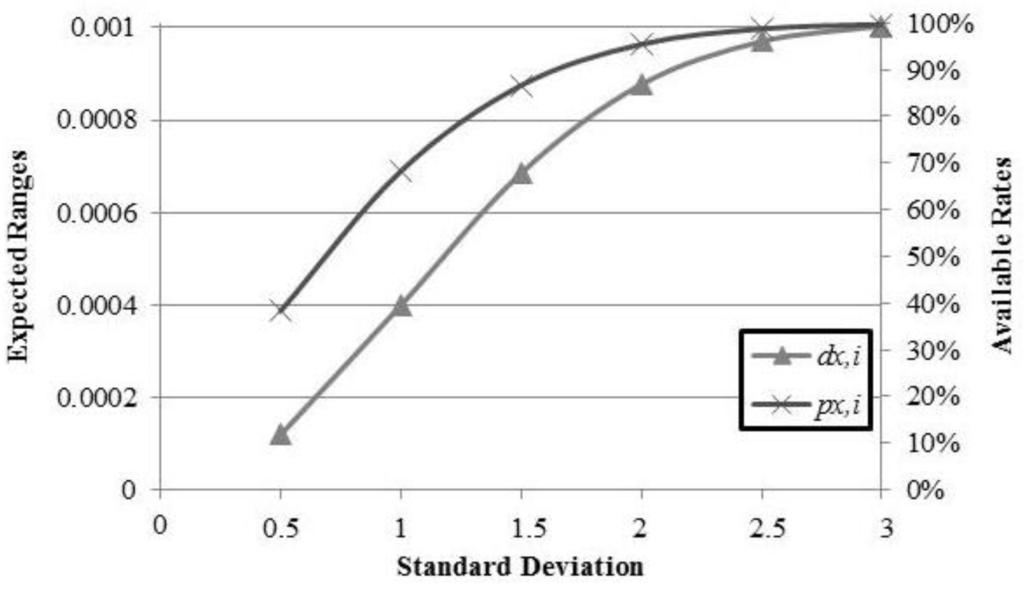
شکل 3. محدوده مورد انتظار طول جغرافیایی با آستانه های مختلف فیلتر بیرونی.

شکل 4. محدوده های مورد انتظار عرض جغرافیایی با آستانه های مختلف فیلتر بیرونی.
شکل 5. معماری سیستم CVO.
شکل 6. محیط آزمایش در بزرگراه های شماره 1 و شماره 3 در تایوان در 23 نوامبر 2013.
شکل 7. نتایج روش موقعیت یابی مبتنی بر شناسه سلولی در 23 نوامبر 2013.
شکل 8. نتایج روش تعیین موقعیت پیشنهادی در 23 نوامبر 2013.
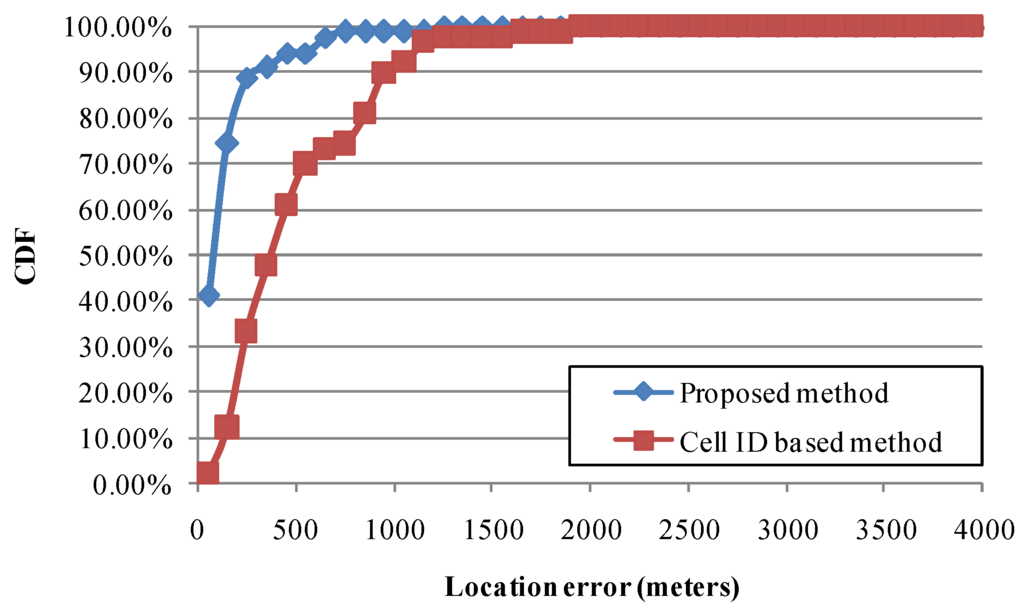
شکل 9. مقایسه روش های مختلف موقعیت یابی در 23 نوامبر 2013.
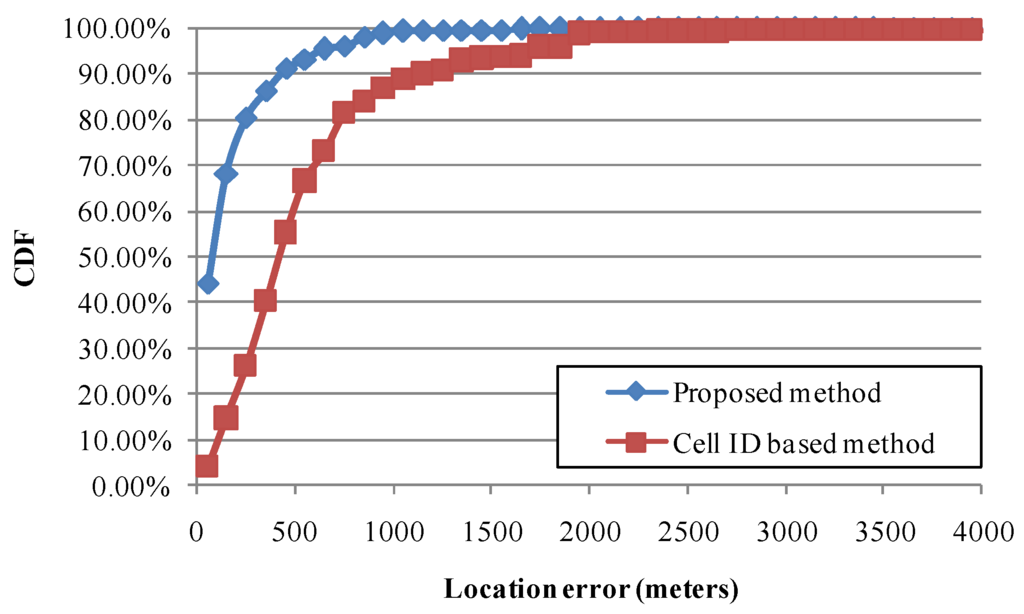
شکل 10. مقایسه روش های مختلف موقعیت یابی در 4 دسامبر 2013.
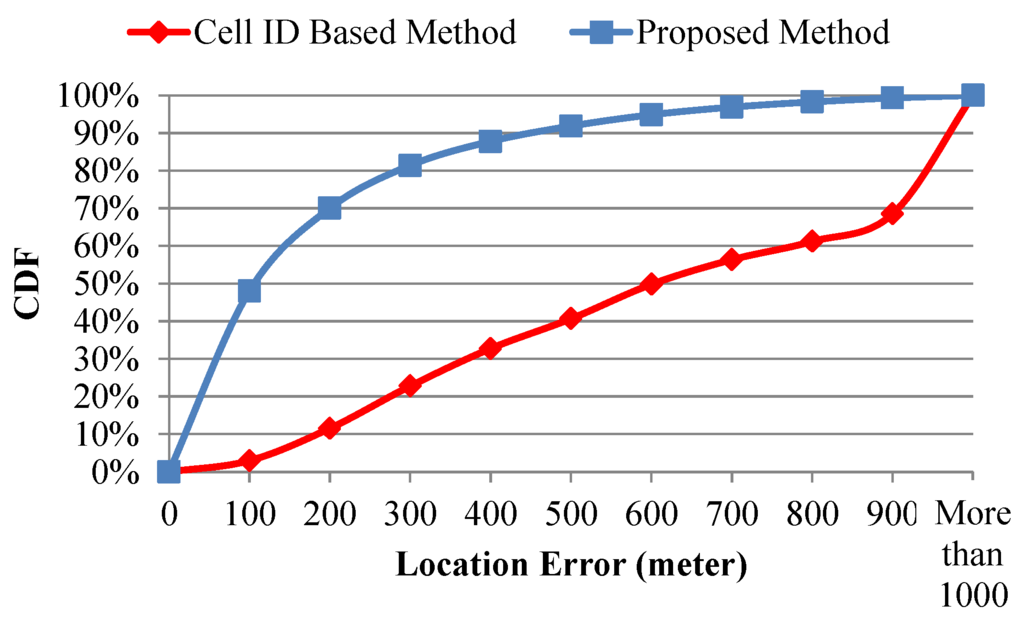
شکل 11. مقایسه روش های مختلف موقعیت یابی.

جدول 1. مقایسه روش های مختلف موقعیت یابی در 23 نوامبر 2013.
جدول 2. مقایسه روش های مختلف موقعیت یابی در 4 دسامبر 2013.
جدول 3. نسبت سوابق تاریخی برای هر نوع جاده.
جدول 4. تجزیه و تحلیل میانگین خطاهای مکان برای هر نوع جاده (واحد: متر).
جدول 5. تجزیه و تحلیل موجودی برای هر نوع جاده.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر