

خلاصه
بافت فضایی ; محلی Moran’s I ; مدل فرضیه ; مدل تأیید ؛ استخراج جاده
1. معرفی
2. روش شناسی
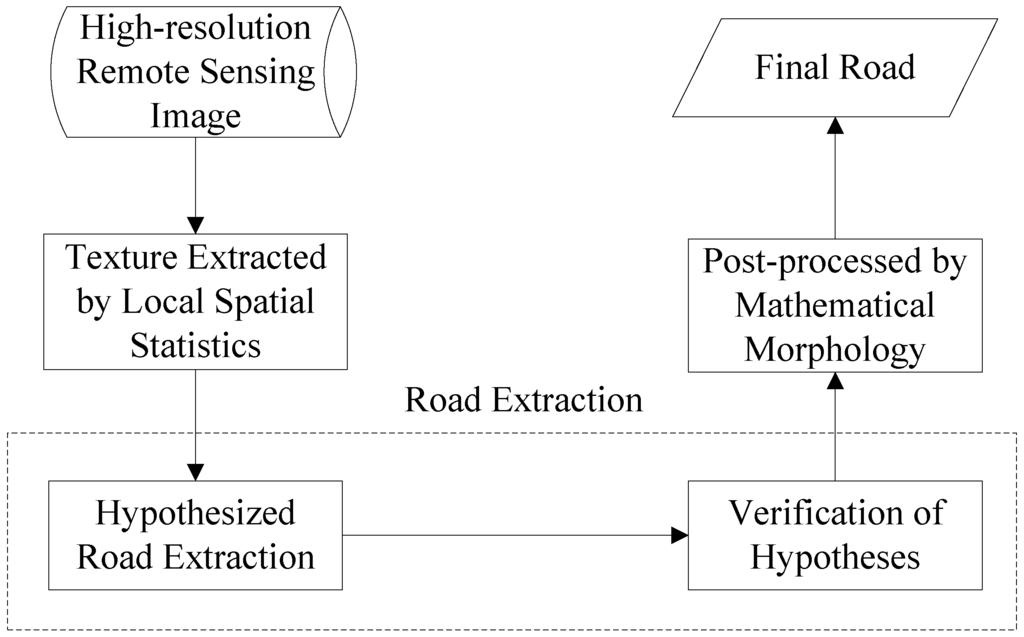
2.1. استخراج اطلاعات بافت
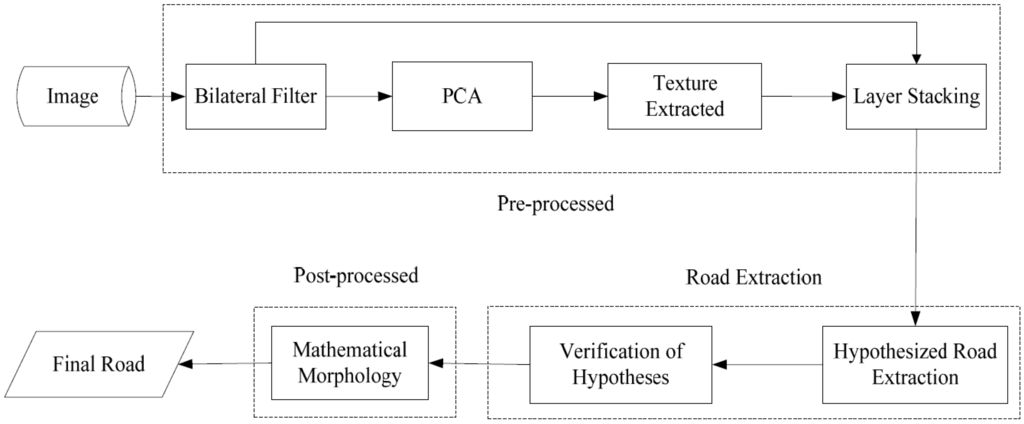
بافت تصویر به طور کلی تغییرپذیری فضایی داده های رادیومتری را توصیف می کند و به عنوان اعداد دیجیتال یک تصویر سنجش از دور بیان می شود. در استخراج ویژگیها از تصاویر، اطلاعات بافت نقش مهمی در تمایز بین جادهها، ساختمانها و سایر اشیاء مصنوعی بازی میکند [ 16 ]. قبل از استخراج اطلاعات بافت، لبههای جاده در ابتدا با استفاده از یک فیلتر دوطرفه بهبود مییابند که به صورت [ 17 و 18 ] تعریف میشود.
که در آن L تصویر است. ضریب نرمال سازی W p تضمین می کند که مجموع وزن های پیکسل برابر با 1.0 است جیσس( | | p − q| | )جی�س(||پ-�||). جیσrجی��یک محدوده گاوسی است که تأثیر پیکسل q را زمانی که مقدار شدت Lq با L p متفاوت است کاهش می دهد . پیکسل هدفی که فیلتر می شود با p [ 17 ] و وزن مشخص می شودجیσسجی�سبرای پیکسل q با L گاوسی p تعریف می شود . تصویر فیلتر شده توسط فیلتر دو طرفه توسط تجزیه و تحلیل مؤلفه اصلی (PCA) [ 19 ] پردازش می شود، نتیجه PCA با شاخص Moran’s I محلی برای استخراج بافت محاسبه می شود. سپس نتیجه با انباشتن لایه ها به باندهای طیفی تصویر اضافه می شود. Moran’s I محلی [ 20 ، 21 ] به این صورت تعریف می شود
که در آن n تعداد مشاهدات جغرافیایی مرجع است، x i ، x j به ترتیب مشاهدات در مکان i و j ام هستند، و ایکس¯ایکس¯میانگین مشاهدات مقدار وزن w ij در رابطه (2) بر اساس همسایه های مجاور تعیین می شود و به صورت تعریف می شود.
یک کلاس خاص از قوانین همسایگی باید برای محاسبه Moran’s I محلی انتخاب شود . این قانون مشخص می کند که کدام پیکسل های مجاور باید با پیکسل مرکزی مقایسه شوند. انتخاب ها به شرح زیر فهرست شده اند [ 22 ]:
| مورد روک | پیکسل های بالا، پایین، چپ و راست را انتخاب می کند. |
| پرونده اسقف | چهار پیکسل همسایه مورب را انتخاب می کند. |
| پرونده ملکه | هر هشت پیکسل مجاور را انتخاب می کند. |
| افقی | دو پیکسل مجاور را در یک ردیف انتخاب می کند. |
| عمودی | دو پیکسل مجاور را در یک ستون انتخاب می کند. |
| شیب مثبت | دو پیکسل مجاور را در گوشه های مخالف در یک مورب مثبت انتخاب می کند. |
| شیب منفی | دو پیکسل مجاور را در گوشه های مخالف در یک قطر منفی انتخاب می کند. |
2.2. استخراج جاده
پارامترهای بیان کمی دانش جاده شامل روشنایی، میانگین، انحراف معیار، مستطیل، مساحت و غیره است. “روشنایی” برای نشان دادن مقدار خاکستری یک تصویر استفاده می شود، در حالی که “میانگین” برای نشان دادن مقدار خاکستری یک نوار از تصویر استفاده می شود. رابطه بین روشنایی و میانگین به صورت تعریف شده است
جایی که B روشنایی است. K تعداد باندهای تصویر و متر¯¯¯منمتر¯منمیانگین مقدار خاکستری باند i است . انحراف معیار منعکس کننده همگنی اشیاء جاده است. انحراف استاندارد به این صورت تعریف می شود
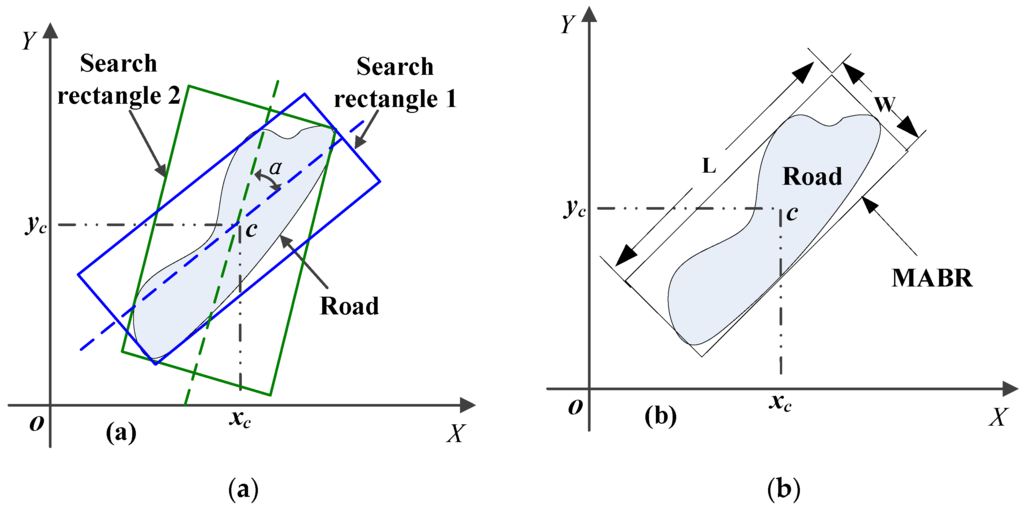
جایی که σ انحراف معیار شی جاده است. N تعداد پیکسل های شی جاده است. تو¯تو¯میانگین مقدار خاکستری شی جاده و u i مقدار خاکستری پیکسل i در شی جاده است. با توجه به دانش جاده (1) ذکر شده در پاراگراف اول بخش 2.2 ، انحراف استاندارد اشیاء جاده تا حدی کم است و خاکستری تضاد خاصی را با پس زمینه اطراف نشان می دهد. بنابراین، روشنایی و انحراف معیار برای ساخت مدل فرضیه انتخاب می شوند. سه مؤلفه دیگر دانش جاده (بند 1، بخش 2.2) نشان می دهد که مستطیل شکل و نسبت ابعاد اجسام جاده نسبتاً زیاد است. اما مشکل دیگر این است که مستطیل شکل و نسبت ابعاد ساختمان ها نیز نسبتاً زیاد است. برای غلبه بر این مشکل، از منطقه برای از بین بردن تأثیرات منفی ساختمان ها استفاده می کنیم. ساختمان ها از نظر تصویر مستقل هستند و هم مرز نیستند. بنابراین مساحت ساختمان به طور قابل توجهی کمتر از مساحت جاده است. در نتیجه، مستطیل، نسبت ابعاد و مساحت برای توسعه مدل تأیید انتخاب شدهاند. مستطیل بودن به شرح زیر است
که در آن RE مستطیل شکل جاده، A جاده مساحت جاده، A MABR مساحت MABR، L MABR و W MABR به ترتیب طول و عرض MABR هستند. بیان مدل فرضیه به صورت زیر است:
که در آن جاده H نشان دهنده جاده های فرضی است، b و s به ترتیب روشنایی و انحراف معیار جاده ها هستند، b با استفاده از میانگین مقدار خاکستری چهار باند (R، G، B و بافت فضایی) محاسبه می شود. b 1 و b 2 آستانه های از پیش تعریف شده برای روشنایی جاده ها هستند. س1س1و س2س2آستانه های از پیش تعریف شده برای انحراف معیار جاده ها هستند. برای اشیاء تولید شده توسط تقسیم بندی تصویر، اگر b ∈ [ب1، ب2]ب∈[ب1، ب2]یا s ∈ [س1، س2]س∈[س1، س2]، سپس اشیاء مربوطه به ترتیب به جاده مجموعه B یا جاده S تعلق دارند . مدل تأیید فرضیه برای حذف آن اشیاء کاذب مانند درختان، وسایل نقلیه و سازههای مصنوعی استفاده میشود. بیان مدل تأیید فرضیه به شرح زیر است:
که در آن جاده V نشان دهنده جاده ها پس از تأیید است، r، w و a به ترتیب مستطیل شکل، نسبت ابعاد و مساحت جاده ها هستند، r 1 ، w 1 و a 1 آستانه های از پیش تعریف شده برای مستطیل شکل، نسبت ابعاد و مساحت جاده هستند. بخش ها به ترتیب برای اشیاء تولید شده توسط تقسیم بندی تصویر، اگر r ∈ ( 0 , r1)�∈(0، �1)، w ∈ ( 0 , w1) �∈(0، �1)یا a ∈ ( 0 , آ1)آ∈(0، آ1)، سپس اشیاء مربوطه به ترتیب به مجموعه R ، مجموعه W یا مجموعه A تعلق دارند . در معادله (8) Y¯¯¯�¯مجموعه مکمل مجموعه Y است . معادله (8) به این معنی است که وقتی اشیاء موجود در جاده های فرضی در مجموعه Y قرار می گیرند، از جاده H حذف می شوند . نتایج تایید شده جاده های استخراج شده است.
2.3. پس پردازش
روش ریخت شناسی ریاضی توسط Matheron و Serra در سال 1964 معرفی شد و یکی از مهمترین چارچوب ها برای پردازش غیر خطی تصویر است [ 25 ]. عملیات اساسی مورفولوژی ریاضی شامل اتساع، فرسایش، باز شدن و بسته شدن است. عملیات بسته شدن به صورت تعریف شده است
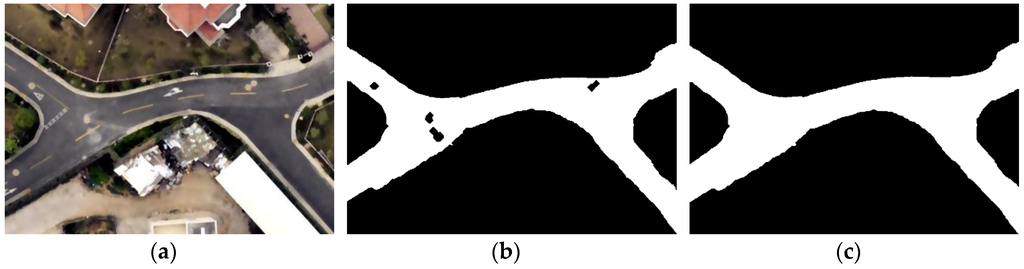
که در آن • عملیات بسته شدن، A تصویر باینری، B عنصر ساختاری، ⊕ و ⊖ به ترتیب عملیات اتساع و فرسایش است. شکل 4 آزمایش عملیات بستن را نشان می دهد. شکل 4 a تصویر اصلی را نشان می دهد و شکل 4 b نتایج استخراج جاده را نشان می دهد. نتایج پس از پردازش توسط عملیات بسته شدن در شکل 4 ج نشان داده شده است.
3. نتایج و بحث
3.1. آزمایش 1
3.2. آزمایش 2
3.3. ارزیابی دقت
سه معیار ارزیابی پذیرفته شده زیر برای ارزیابی میزان مطابقت نتایج استخراج جاده ما با مجموعه داده های حقیقت زمینی استفاده می شود [ 4 ، 5 ، 28 ، 29 ، 30 ].
جایی که TP نشان دهنده پیکسل های جاده استخراج شده است که با داده های مرجع منطبق است، FN به پیکسل های جاده ای اشاره دارد که در داده های مرجع هستند اما در نتیجه استخراج شده نیستند، و FP نشان دهنده پیکسل های جاده استخراج شده است که در داده های مرجع نیستند. جدول 1 دقت نتایج استخراج جاده را نشان می دهد.
3.4. انتخاب پارامتر
4. نتیجه گیری
منابع
- تریدر، جی. وانگ، ی. تفسیر جاده مبتنی بر دانش در تصاویر هوایی. بین المللی قوس. فتوگرام Remote Sens. 1999 , 32 , 635-640. [ Google Scholar ]
- Luo, Z. تجزیه و تحلیل و تحقیق استخراج جاده از تصاویر سنجش از دور با وضوح بالا، شانگهای . دانشگاه جیائو تونگ شانگهای: شانگهای، چین، 2008. [ Google Scholar ]
- داس، اس. میرنالینی، تی تی; Varghese, K. استفاده از ویژگی های برجسته برای طراحی یک چارچوب چند مرحله ای برای استخراج جاده ها از تصاویر ماهواره ای چندطیفی با وضوح بالا. IEEE Trans. Geosci. Remote Sens. 2011 , 49 , 3906–3931. [ Google Scholar ] [ CrossRef ]
- میائو، ز. وانگ، بی. Shi, W. یک روش نیمه خودکار برای استخراج خط مرکزی جاده از تصاویر VHR. IEEE Geosci. سنسور از راه دور Lett. 2014 ، 11 ، 1856-1860. [ Google Scholar ] [ CrossRef ]
- شی، دبلیو. میائو، ز. Debayle, J. یک روش یکپارچه برای استخراج خط مرکزی جاده اصلی شهری از تصاویر سنجش از دور نوری. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 3359–3372. [ Google Scholar ] [ CrossRef ]
- یوان، جی دی؛ وانگ، WB; یان، ال. لی، آر. استخراج خودکار جاده مبتنی بر لژیون از تصاویر ماهواره ای. IEEE Trans. Geosci. Remote Sens. 2011 , 40 , 4528–4538. [ Google Scholar ] [ CrossRef ]
- ناکاگورو، ی. ماخانوف، اس.اس. Dailey، MN آزمایش های عددی با همکاری چند مار درجه دوم برای استخراج جاده. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 765-783. [ Google Scholar ] [ CrossRef ]
- گروت، ا. هیپکه، سی. Rottensteiner, F. استخراج شبکه جاده ای در مناطق حومه شهر. فتوگرام ضبط 2012 ، 27 ، 8-28. [ Google Scholar ] [ CrossRef ]
- کائور، ا. سینگ، آر. روش های مختلف استخراج جاده از تصاویر ماهواره ای: بررسی. بین المللی J. Res. 2015 ، 2 ، 1025-1032. [ Google Scholar ]
- لی، ی. خو، ال. Piao, H. استخراج جاده نیمه اتوماتیک از تصویر سنجش از دور با وضوح بالا: بررسی و چشم انداز. در مجموعه مقالات نهمین کنفرانس بین المللی IEEE در سال 2009 در مورد سیستم های هوشمند هیبریدی، شنیانگ، چین، 12 تا 14 اوت 2009. ص 204-209.
- شی، دبلیو. میائو، ز. وانگ، کیو. ژانگ، H. طبقه بندی طیفی فضایی و ویژگی های شکل برای استخراج خط مرکزی جاده های شهری. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 11 ، 788-792. [ Google Scholar ]
- میائو، ز. شی، دبلیو. ژانگ، اچ. وانگ، X. استخراج خط مرکزی جاده از تصاویر با وضوح بالا بر اساس ویژگیهای شکل و خطوط رگرسیون تطبیقی چند متغیره. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 10 ، 583-587. [ Google Scholar ] [ CrossRef ]
- سینگ، پی پی. Garg، RD استخراج خودکار جاده از تصویر ماهواره ای با وضوح بالا با استفاده از آستانه جهانی تطبیقی و عملیات مورفولوژیکی. شرکت هندی Remote Sens. 2013 , 41 , 631-640. [ Google Scholar ] [ CrossRef ]
- آهنگ، ام جی; Civco، D. استخراج جاده با استفاده از SVM و قطعهبندی تصویر. فتوگرام مهندس Remote Sens. 2004 ، 70 ، 1365-1371. [ Google Scholar ] [ CrossRef ]
- الخضيري، د. کاراواگی، آی. Giada، S. ارزیابی آسیب ساختاری از دادههای IKONOS با استفاده از تکنیکهای تشخیص تغییر، تقسیمبندی شیگرا و طبقهبندی. فتوگرام مهندس Remote Sens. 2005 ، 71 ، 825-837. [ Google Scholar ] [ CrossRef ]
- آهنگ، جی. وانگ، ایکس. Li, P. تشخیص آسیب ساختمان شهری از تصاویر VHR با گنجاندن ویژگیهای بافت زمانی و مکانی. J. Remote Sens. 2012 ، 16 ، 1233-1245. [ Google Scholar ]
- پاریس، اس. کورنپرابست، پ. تامبلین، جی. دوراند، ف. فیلترینگ دوطرفه: نظریه و کاربردها. پیدا شد. روندها (R) محاسبه. گرافیک Vis. 2008 ، 4 ، 1-73. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. Qin، Q. ژائو، جی. بله، X. فنگ، ایکس. Qin، X. یانگ، ایکس. تشخیص و ارزیابی مبتنی بر دانش جاده های آسیب دیده با استفاده از تصویر سنجش از دور با وضوح بالا پس از فاجعه. Remote Sens. 2015 ، 7 ، 4948–4967. [ Google Scholar ] [ CrossRef ]
- Shlens, J. A Tutorial on Principal Components Analysis. 2014. در دسترس آنلاین: http://arxiv.org/pdf/1404.1100v1.pdf (در 7 آوریل 2014 در دسترس است).
- امرسون، CW; لام، NS; Quattroch، DA مقایسه واریانس محلی، بعد فراکتال، و موران I به عنوان کمک به طبقه بندی تصاویر چند طیفی. بین المللی J. Remote Sens. 2005 ، 26 ، 1575-1588. [ Google Scholar ] [ CrossRef ]
- Anselin، L. شاخص های محلی ارتباط فضایی-LISA. Geogr. مقعدی 1995 ، 27 ، 93-115. [ Google Scholar ] [ CrossRef ]
- زو، ز. Su, W. تجزیه و تحلیل طبقه بندی تصویر SPOT 5 بر اساس آمار فضایی محلی. J. Remote Sens. 2011 ، 15 ، 957-972. [ Google Scholar ]
- چنگ، پی. یان، اچ. Han, Z. الگوریتمی برای محاسبه مستطیل محدود کننده حداقل مساحت یک چندضلعی دلخواه. J. Eng. Graphics 2008 , 1 , 122-126. [ Google Scholar ]
- Castleman، KR پردازش تصویر دیجیتال ; Prentice Hall: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 1995. [ Google Scholar ]
- دیاس، اف. کوستی، جی. Najman, L. عملگرهای بعدی برای ریخت شناسی ریاضی در مجتمع های ساده. تشخیص الگو Lett. 2014 ، 47 ، 111-119. [ Google Scholar ] [ CrossRef ]
- مالک، ر. خدم، ر. Belhadj-Aissa، A. تقسیم بندی چند مقیاسی برای تصاویر سنجش از دور بر اساس قانون ناهمگنی حداقل. در مجموعه مقالات کنفرانس نظریه پردازش تصویر، ابزارها و کاربردها، پاریس، فرانسه، 14 تا 17 اکتبر 2014.
- هو، جی. ژانگ، ایکس. شن، ایکس. Zhang, C. روشی برای استخراج جاده در تصاویر سنجش از دور با وضوح بالا بر اساس تجزیه و تحلیل تصویر شی گرا. فناوری سنسور از راه دور. Appl. 2006 ، 21 ، 184-188. [ Google Scholar ]
- ویدمن، سی. هیپکه، سی. مایر، اچ. ارزیابی تجربی محورهای جاده ای استخراج شده به طور خودکار. در مجموعه مقالات کنفرانس 1998 بینایی کامپیوتری و تشخیص الگو (CVPR)، سانتا باربارا، کالیفرنیا، ایالات متحده آمریکا، 23 تا 25 ژوئن 1998. صص 172-187.
- لین، تی. دبرا، F. استراتژی های ارزیابی کمی برای تولید مدل سه بعدی شهری از داده های سنجش از دور. محاسبه کنید. گرافیک. 2015 ، 49 ، 82-91. [ Google Scholar ]
- بویکو، ا. توماس، اف. استخراج جاده ها از ابرهای نقطه ای متراکم در محیط شهری مقیاس بزرگ. ISPRS J. Photogramm. Remote Sens. 2011 , 66 , S2–S12. [ Google Scholar ] [ CrossRef ]
- چن، سی. تشخیص و ارزیابی آسیب برای پل روی آب از تصاویر سنجش از دور نوری با وضوح بالا. Ph.D. پایان نامه، دانشگاه پکن، پکن، چین، 9 ژوئن 2013. [ Google Scholar ]
- گائو، سی. Sun، Y. استخراج خودکار خط مرکزی جاده از تصاویر با استفاده از داده های GPS جاده. Remote Sens. 2014 , 6 , 9014–9033. [ Google Scholar ]






© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر