

خلاصه
در حال تکامل مشاهده زمین و تکنیک های تشخیص تغییر، شناسایی خودکار کاربری زمین و تغییر پوشش زمین (LULCC) را تا حد زیادی از مقادیر عظیم داده های سنجش از دور امکان پذیر می کند. در عین حال چالش بزرگی را در سازماندهی، نمایش و مدل سازی موثر چنین اطلاعاتی ایجاد می کند. این مطالعه یک چارچوب محاسباتی یکپارچه را برای پشتیبانی از مدلسازی، استدلال معنایی و مکانی اطلاعات تغییر با توجه به فضا، زمان و توپولوژی پیشنهاد و اجرا میکند. ما ابتدا یک مدل مفهومی را پیشنهاد کردیم تا به طور رسمی تنوع مکانی – زمانی دادههای تغییر را نشان دهد، که دانش ضروری برای حمایت از مطالعات مختلف زیستمحیطی و اجتماعی، مانند مطالعات جنگلزدایی و شهرنشینی است. سپس، یک هستی شناسی فضایی برای رمزگذاری این داده های مکانی-زمانی معنایی در قالبی قابل فهم برای ماشین ایجاد شد. بر اساس دانش تعریف شده در هستی شناسی و قوانین استدلال مرتبط، یک پلت فرم معنایی برای پشتیبانی از پرس و جو معنایی و تغییر استدلال مسیر مناطق با LULCC ایجاد شد. این پلتفرم معنایی نوآورانه است، زیرا استدلال معنایی و مکانی را در یک چارچوب نرم افزاری محاسباتی و عملیاتی منسجم ادغام می کند تا از تجزیه و تحلیل معنایی خودکار داده های سری زمانی پشتیبانی کند که می تواند فراتر از مجموعه داده های LULC باشد. علاوه بر این، این سیستم به خوبی مقیاس می شود و مقدار داده ها افزایش می یابد، که توسط تعدادی از نتایج تجربی تأیید می شود.
کلید واژه ها:
مدلسازی معنایی جغرافیایی ; تشخیص تغییر ؛ کاربری و پوشش زمین ; استدلال معنایی ; استدلال فضایی
1. معرفی
پیشرفت تکنیکهای سنجش از راه دور و سیستمهای جهانی رصد زمین (GEOSS) امکان جمعآوری حجم وسیعی از دادههای محیطی در مورد سطح زمین را با وضوح بهتر فراهم میکند. تشخیص تغییر کاربری زمین (LULC) یکی از حوزههای تحقیقاتی کلیدی تشخیص تغییر سنجش از دور است [ 1 ، 2 ، 3 ، 4 ]. تئوریها و فنآوریها برای تشخیص تغییر در طیف گستردهای از کاربردهای جغرافیایی، از جمله نظارت بر منظر [ 5 ، 6 ]، برآورد منابع طبیعی [ 7 ] و مدیریت زیستمحیطی [ 8 ] استفاده شدهاند . اگرچه چندین تکنیک [ 9] می تواند تغییرات LULC را از تصاویر سنجش از دور به دقت تشخیص دهد، چالش های بزرگی برای سازماندهی و مدل سازی موثر چنین اطلاعاتی از تصاویر سنجش از راه دور چند زمانی وجود دارد.
این چالشها از این واقعیت ناشی میشوند که تغییر در یک یا چند بعد میتواند باعث شود که یک شی فضایی به چند شیء تقسیم شود، با شی (های) فضایی دیگر ادغام شود یا در یک شی جدید حل شود. علاوه بر این، مدلسازی تغییراتی که چندین رابطه (ابعاد) را با هم ترکیب میکنند بسیار دشوار است. شکل 1 سه چالش پیش روی هر مدل معنایی را برای مدل سازی اطلاعات تغییر از داده های سنجش از دور سری زمانی نشان می دهد.
در حالت اول ( شکل 1 الف)، کل LULC شی زمین فضایی را مشاهده می کنیم که در طول زمان تغییر می کند. شیء جغرافیایی دو ویژگی LULC متمایز را در مُهرهای زمانی مختلف نشان میدهد: A در سال 2006 و B در سال 2012. مدلهای معنایی نیاز به ادغام هر دو تعریف این شیء دارند. برای مورد دوم ( شکل 1 ب)، ویژگی های محلی در یک شیء یکنواخت سراسری تغییر می کنند. شی زمین مکانی تنها دارای یک ویژگی A در سال 2006 است در حالی که بیشتر آن ویژگی را با تغییرات جزئی ویژگی B در سال 2012 حفظ می کند. هنگام ساخت یک مدل معنایی برای ویژگی های این شی مکانی، طبقه بندی آن دشوار خواهد بود، زیرا می توان آن را به طور منطقی توصیف کرد. به صورت A، B یا حتی A و B به طور همزمان (مورد شکل 1ب). در حالت سوم ( شکل 1 ج)، ویژگی کلی شی ممکن است تغییر کند در حالی که ویژگی های محلی ثابت می مانند. در سال 2006، شی geospatial دارای یک ویژگی جهانی A است و شامل دو زیر مجموعه B و C است. در سال 2012، ویژگی جهانی A به ویژگی جهانی D تغییر می کند در حالی که ویژگی های محلی C و B بدون تغییر باقی می مانند. در طول مدلسازی معنایی برای این شی زمینفضایی، مقولهها بسیار پیچیدهتر میشوند، زیرا شی زمینفضایی ممکن است بهعنوان A، D، یا «B و C» توصیف شود، یا بهعنوان یک عبارت حتی پیچیدهتر، مانند A با زیرمجموعههای B و C توصیف شود. یا D با زیر مجموعه های B و C.
برای پرداختن به این چالش ها، تحقیقات جامع تشخیص تغییرات مکانی-زمانی باید شامل تشخیص تغییرات (محل وقوع آنها)، تعریف معنایی تغییرات (آنها چیست)، ردیابی موثر تغییرات (نحوه تکامل آنها) و ارتباط این تغییرات با سایر ژئوفیزیک یا فرآیندهای انسانی (نحوه وقوع آنها). این نیاز به یک رویکرد مدلسازی جدید دارد که بتواند تمام این ابعاد اطلاعات را ذخیره و ضبط کند [ 10 ]. بنابراین، تشخیص تغییر نیازمند یک مدل داده چند بعدی است که شامل ابعاد مکانی، طیفی، زمانی و ویژگی است. با توجه به پویایی تغییر LULC (LULCC)، استدلال معنایی نیز مورد نیاز است تا بتوان تکامل یک منطقه را ردیابی کرد و روابط مکانی، زمانی و توپولوژیکی آن را با مناطق مجاور کشف کرد [11] .]. در نهایت، بسیار مهم است که نمایندگی LULCC دانش از منابع دیگر، مانند اطلاعات برنامه ریزی زمین و منابع، فراتر از اطلاعات استخراج شده از تصاویر سنجش از دور [ 12 ] را یکپارچه کند.
برای مدلسازی این پیچیدگی و مدیریت مؤثر اطلاعات LULCC از دادههای مکانی سری زمانی (تصاویر سنجش از دور)، ما یک چارچوب محاسباتی یکپارچه را برای پشتیبانی از مدلسازی، استدلال معنایی و مکانی اطلاعات تغییر با توجه به فضا، زمان و توپولوژی پیشنهاد و پیادهسازی میکنیم. بقیه مقاله به شرح زیر سازماندهی شده است: بخش 2 کار مربوطه در LULC و مدل سازی داده های مکانی-زمانی را بررسی می کند و مسائل باقی مانده در این زمینه را مورد بحث قرار می دهد. بخش 3 مدل مفهومی برای مدلسازی LULCC، اجرای هستیشناختی آن، تعریف پرسشها و قوانین برای استنتاج دانش جدید از دادههای موجود، و همچنین جزئیات پیادهسازی بستر معنایی برای استدلال مکانی-زمانی و معنایی را پیشنهاد میکند.بخش 4 نمونه اولیه را با تصویری از چندین مورد پرس و جوی تغییر و ردیابی مسیر تغییر نشان می دهد. بخش 5 مقیاس پذیری سیستم پیشنهادی را از طریق تعدادی آزمایش تأیید می کند. بخش 6 کار را به پایان می رساند، مشارکت های ما را برجسته می کند و جهت گیری های تحقیقاتی آینده را مورد بحث قرار می دهد.
2. بررسی ادبیات
تلاشهای زیادی برای پرداختن به چالشها در سازماندهی رسمی نتایج تشخیص تغییر از تصاویر سنجش از راه دور انجام شده است [ 13 ، 14 ، 15 ]. چالشها به دو دسته گستردهتر تعلق دارند: (1) نحوه پرداختن به ابهام یا ابهام معنایی در تعریف نوع LULC. و (2) نحوه مدلسازی معنایی اطلاعات تغییر مربوط به فضا، زمان و زمینه آن از دادههای سنجش از دور سری زمانی.
2.1. پیشرفت در افزایش قابلیت همکاری معنایی سیستم های طبقه بندی LULC موجود
اولین چالش یک مشکل همکاری معنایی شناخته شده است. تعداد زیادی استاندارد طبقه بندی وجود دارد که توسط سازمان های مختلف در رشته های مختلف برای اهداف مختلف و در سطوح مختلف انتزاع استفاده می شود [ 16 ]. به عنوان مثال، سیستم های طبقه بندی LULC پرکاربرد به تنهایی شامل سیستم طبقه بندی LULC (اصلاح شده) اندرسون (LCCS) (Anderson LULC) [17]، CLC (Corine Land Cover) [ 18 ]، استانداردهای طبقه بندی مبتنی بر زمین (LBCS) [ 19] است. ]، LCCS FAO [ 20 ]، طبقه بندی LULC پایگاه داده ملی کاربری اراضی انگلستان (NLUD) [ 21]، در میان بسیاری دیگر. این سیستمهای طبقهبندی مختلف، کلاسهای LULC را متفاوت تعریف میکنند و مانع تبادل، یکپارچهسازی و استفاده مجدد از دادهها میشوند. این مسائل معنایی همچنین شناسایی و تفسیر فرآیندهای تغییر را دشوارتر می کند [ 22 ].
تلاشها برای غلبه بر این ناهمگونی معنایی شامل توسعه یک استاندارد طبقهبندی همگن برای اعمال به مجموعه دادههای LULC موجود از منابع متعدد است. به عنوان مثال، INSPIRE [ 23 ] یک ابتکار اتحادیه اروپا برای ایجاد زیرساخت داده های مکانی برای هماهنگ کردن اطلاعات مکانی و ارائه دسترسی یک مرحله ای به مجموعه داده ها از کشورهای مختلف اروپایی است. سیستم های طبقه بندی یکنواخت و استانداردهای ابرداده به گونه ای اعمال خواهند شد که مسئله ناهمگونی قابل حل باشد. استراتژیهایی از این دست را میتوان به عنوان رویکردهای بالا به پایین در نظر گرفت، زیرا همه کشورهای عضو یا کشورها از استانداردهای طبقهبندی اجماع یک مرجع برای بهبود درک متقابل دادهها استفاده میکنند.
تلاشهای دیگر شامل یک رویکرد از پایین به بالا است که به ایجاد یک گذرگاه در میان سیستمهای طبقهبندی مختلف LULC از طریق تحلیل معنایی اختصاص دارد. این استراتژی همچنین به عنوان تطبیق یا تراز هستی شناسی شناخته می شود و نیاز به محاسبه شباهت معنایی بین تعاریف مختلف کلاس LULC دارد. روشهای معمولی عبارتند از: هندسی [ 24 ]، مبتنی بر ویژگی [ 25 ، 26 ]، شبکه [ 27 ]، تراز [ 28 ] و نظری اطلاعات [ 29 ]] مدل سازی از آنجا که یک تعریف نوع زمین معمولاً در یک بلوک متنی ارائه میشود، تکنیکهای تحلیل متن نیز برای استخراج ویژگیهای فضایی و فضایی یک کلاس LULC برای غنیسازی تعریف رسمی در هستیشناسی LULC مورد بررسی قرار گرفت [30 ] . اگرچه این آثار به طور قابل توجهی قابلیت همکاری معنایی را در میان سیستمهای طبقهبندی LULC موجود از طریق رسمیسازی هستیشناختی بهبود بخشیدهاند، اما بیشتر بر تطبیق تعریف مفهومی انواع کاربری زمین تمرکز میکنند، به جای اشیاء فضایی خاص شناساییشده از تصاویر سنجش از دور، که حاوی اطلاعات بیشتری نسبت به یک LULC واحد هستند. نوع با این حال، مدلسازی معنایی تغییر مکانی-زمانی یک منطقه خاص مورد مطالعه قرار نگرفته است. یکی از اهداف اصلی این مقاله حل این موضوع است.
2.2. پیشرفت در توسعه یک بستر استدلال مکانی-زمانی
در مقایسه با مشکل قابلیت همکاری معنایی که به طور گسترده در سیستم های طبقه بندی LULC مطالعه شده است، مطالعات کمتری [ 31 ، 32 ، 33 ، 34 ، 35 ، 36 ، 37] در مدلسازی معنایی اطلاعات تغییر در رابطه با ویژگیهای مکانی، زمانی و سایر ویژگیهای آن، و بهویژه در مورد ادغام این مدلهای معنایی در یک چارچوب استدلال فضایی عملیاتی، یافت میشوند. این تا حدی به دلیل پیچیدگی در مدلسازی اشیاء فضایی است که شامل چهار بعد متمایز است: (1) جغرافیایی (یعنی مکان). (2) بعد هندسی (یعنی شکل یا اندازه). (3) توپولوژیک (به عنوان مثال، تقاطع با اشیاء فضایی دیگر). و (4) زمانی، (یعنی زمان خلقت و توقف). فراتر از این، پیچیدگی مدلسازی نیز بهطور چشمگیری افزایش مییابد که یک فرآیند تغییر شامل روابط پیچیدهای است که ابعاد متعددی را با هم ترکیب میکند، مانند شهرنشینی، که باید به تصویر کشیده شوند.
برخی از آثار پیشگام در این قلمرو شامل آثار هورنسبی و اگنهوفر [ 31 ]، وربویز [ 32 ]، کلارامونت و جیانگ [ 33 ]، جیانگ و وربویز [ 34 ] و دیگران است که شالوده نظری را برای نمایش تغییر یک شی فضایی ایجاد میکنند. . در عمل، Varanka و Usery [ 35 ] یک هستی شناسی آب های سطحی را برای تعریف رسمی مجموعه داده های هیدرولوژیکی ملی سازمان زمین شناسی ایالات متحده (USGS) توسعه دادند. در این کار، یک بسط فضایی به هستی شناسی عمومی داده شده است که تنها بر نامگذاری مفهومی تمرکز دارد [ 36]]، برای مدل سازی ویژگی های هیدرولوژیکی. ویژگی فضایی یک ویژگی بدنه آبی با وسعت فضایی آن در هستی شناسی مشروح می شود، و یک ویژگی کیفیت زمانی برای توصیف ویژگی ها (به عنوان مثال، زودگذر، متناوب و غیره) جریان آب آن استفاده می شود. باتساکیس و پتراکیس [ 37 ] یک مدل روان 4 بعدی برای بیان وجود موجودی که به بازه زمانی تعریف شده مربوط می شود، توسعه دادند. این شناخته شده ترین مدلی است که می تواند پویایی یک موجودیت را در یک هستی شناسی به تصویر بکشد. با این حال، این مدل پیچیدگی پرس و جو تغییرات زمانی را افزایش میدهد و در حفظ رابطه بین هندسه و معناشناسی محدود میشود، بنابراین برای مدلسازی دادههای تغییر کاربری زمین، که مکان/هندسه جزء ضروری آن است، مناسب نیست.
اخیراً، آرناس و همکارانش [ 9 ] یک مدل داده های مکانی-زمانی، LC3 (Land Cover 3) را برای مطالعه LULCC توسعه دادند. چندین فرآیند تغییر، از جمله تقسیم، ادغام، جداسازی و الحاق تعریف شده است. این مدل یک مزیت آشکار در مدل سازی اطلاعات تغییر دارد. با این حال، تمام روابط توپولوژیکی، مانند “حاوی” و “داخل”، در هستی شناسی از پیش تعریف شده اند. این امر باعث ایجاد مشکلاتی در مدل سازی و پرس و جوی تعداد زیادی از اشیاء فضایی می شود که روابط فضایی بین آن ها نشان دهنده تعداد کل اشیاء است.
در جامعه W3C (کنسرسیوم وب جهانی)، تحقیقاتی انجام شده است که زبانهای مدلسازی هستیشناختی، RDF (چارچوب توصیف منابع) [ 38 ] یا OWL (زبان هستیشناسی وب)، را برای ادغام بعد زمان [ 39 ] گسترش میدهد. مشخصات جدید، مانند OWL-Time، توسعه یافته است [ 40 ، 41 ]. برخی از کارهای مدلسازی فضا-زمان که از این استانداردها استفاده میکنند را میتوان در [ 42 ، 43 ، 44 ، 45 ] یافت . به عنوان مثال، Bereta و همکارانش یک زبان پرس و جوی جدید stSPARQL (زبان پرس و جوی وب معنایی فضا-زمان) را برای پشتیبانی از رمزگذاری بیانی زمان در هستی شناسی های OWL [ 43 ] توسعه دادند. هوانگ و دنگ [44 ] به اهمیت توانمندسازی استدلال مکانی-زمانی بر اساس ژئوآنتولوژی و SWRL (زبان قوانین وب معنایی) اشاره کرد. با این حال، آنها فقط به صورت بسیار مختصر و مفهومی روی راه حل صحبت کردند. Batsakis و Petrakis [ 45 ] از OWL 2.0 و SWRL برای تعریف اطلاعات مکانی-زمانی استفاده کردند که عمدتاً بر روی رمزگذاری روابط فضایی فازی در جهتها (یعنی سمت چپ) اشیاء فضایی تمرکز میکنند. ویژگیها، مانند ویژگیهای کاربری زمین و اطلاعات تغییر، مدلسازی نشدهاند.
برای غلبه بر محدودیتهای ذکر شده در LULC و کارهای مدلسازی معنایی مکانی-زمانی، این مقاله به توسعه یک چارچوب نرمافزاری عملیاتی میپردازد تا استدلال دینامیکی تغییر مکانی-زمانی اشیاء مکانی را در چارچوب مدلسازی و پرس و جو در مورد تغییر LULC ایجاد کند. بخش بعدی ساخت هستیشناسی LULCC، تعریف قوانین معنایی برای پشتیبانی از استدلال و پیادهسازی چارچوب نرمافزاری را شرح میدهد که بر روی دانش موجود در هستیشناسی و قوانین استدلال برای ساختن پلتفرم معنایی پویا عمل میکند.
3. بلوک های ساختمان بستر معنایی
3.1. هستی شناسی جغرافیایی برای LULCC
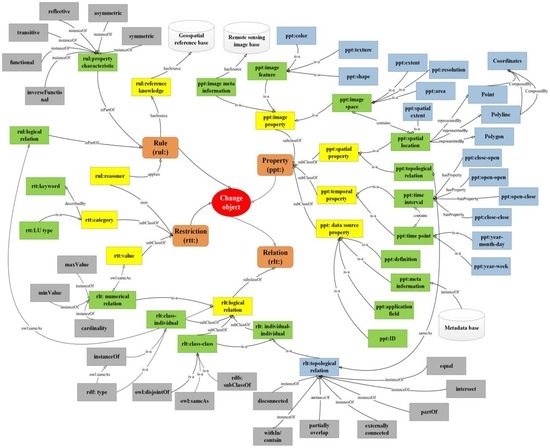
هستی شناسی جغرافیایی پیشنهادی یک شی فضایی، ایستا (یعنی ویژگی تصویری که یک شیء مکانی از آن به دست می آید) و ویژگی های پویا (یعنی تغییر اطلاعات در طول زمان) و روابط آن با سایر اشیاء فضایی مجاور را نشان می دهد. این به طور رسمی LULCC را نشان می دهد و یک مدل رابطه معنایی ارائه می دهد. این هستی شناسی جغرافیایی LULCC که بر اساس حاشیه نویسی تغییر ساخته شده است، از چهار جزء اصلی برای توصیف اشیاء تغییر استفاده می کند: ویژگی، رابطه، قانون و محدودیت. آنها به رنگ نارنجی در شکل 2 به عنوان اولین لایه هستی شناسی نشان داده شده اند.
در هستیشناسی، موجودیتهای مختلف با پیشوندهای متفاوتی برای اشاره به وجه یا فضای نامی که به آن تعلق دارند، اختصاص داده میشوند. به عنوان مثال، ppt:spatial_property، ppt:image_property، ppt:temporal_property و ppt:thematic_property ویژگی های مکانی، تصویری، زمانی و موضوعی یک شی فضایی را نشان می دهد. فراتر از چهار جزء اصلی، موجودیتهای زرد و سبز به ترتیب زیر کلاسهای سطح اول و سطح دوم را نشان میدهند. به عنوان مثال، “مالکیت” بیشتر به “ویژگی مکانی”، “ویژگی زمانی”، “ویژگی تصویر” و “ویژگی منبع داده” تقسیم می شود که ویژگی مکانی و زمانی یک شی فضایی و همچنین ویژگی های کنترل از راه دور را توصیف می کند. تصویر حسی که جسم از آن استخراج می شود. جزء “قانون” قوانین استنتاج را در قالبی قابل فهم برای ماشین توصیف می کند. و قوانین به یک قاعده بازتابی یا یک قانون متقارن برای پشتیبانی از استدلال معنایی طبقه بندی می شوند. گره های آبی نشان دهنده نوع یک نمونه هستند. به عنوان مثال، کلاس “polygon” نوعی کلاس “مکان مکانی” برای توصیف ویژگی فضایی یک ویژگی با یک ویژگی ناحیه، مانند یک قطعه است. گره های برگ به رنگ خاکستری در زیردرخت “رابطه” زیرگروه هایی از نمونه های والد آن هستند. آنها به عنوان محمولات در ساختار سه گانه <موضوع، محمول، شی> در OWL پیاده سازی خواهند شد. دادههای خارجی برای این مدل هستیشناختی از پایگاههای داده مرجع، تصویر سنجش از دور و ابرداده میآیند. کلاس “چند ضلعی” نوعی کلاس “مکان مکانی” برای توصیف ویژگی فضایی یک ویژگی با ویژگی ناحیه، مانند یک قطعه است. گره های برگ به رنگ خاکستری در زیردرخت “رابطه” زیرگروه هایی از نمونه های والد آن هستند. آنها به عنوان محمولات در ساختار سه گانه <موضوع، محمول، شی> در OWL پیاده سازی خواهند شد. دادههای خارجی برای این مدل هستیشناختی از پایگاههای داده مرجع، تصویر سنجش از دور و ابرداده میآیند. کلاس “چند ضلعی” یک نوع کلاس “مکان مکانی” برای توصیف ویژگی فضایی یک ویژگی با یک ویژگی ناحیه، مانند یک قطعه است. گره های برگ به رنگ خاکستری در زیردرخت “رابطه” زیرگروه هایی از نمونه های والد آن هستند. آنها به عنوان محمولات در ساختار سه گانه <موضوع، محمول، شی> در OWL پیاده سازی خواهند شد. دادههای خارجی برای این مدل هستیشناختی از پایگاههای داده مرجع، تصویر سنجش از دور و ابرداده میآیند.
3.2. تعریف قواعد استدلال
قوانین برای استدلال منطقی بر اساس دانش مرجع از منابع مختلف پشتیبانی می کنند. دانش مرجع، درک حرفهای متخصصان است که از پایگاه مرجع جغرافیایی استخراج میشود و مبنایی برای استدلال ارائه میدهد. مدل معنایی ما از دو نوع استدلال برای تشخیص تغییرات مکانی-زمانی پشتیبانی میکند: استدلال منطقی و استدلال مکانی. استدلال منطقی از ویژگیهای یک ویژگی OWL که متعدی یا بازتابی است برای استنتاج دانش فضایی استفاده میکند. همچنین از قوانینی استفاده می کند که به طور خاص برای استنباط در مورد تغییر کاربری زمین در یک منطقه جغرافیایی یا یک شی فضایی تعریف شده است.
قانون 1: برای هر دو شی ایکس1ایکس1و y1�1، معلوم شود که ایکس1ایکس1در نقطه زمانی وجود دارد تی1تی1و y1�1در نقطه زمانی وجود دارد تی2تی2( تی1<تی2تی1<تی2). مرز فضایی جسم ایکس1ایکس1 isSameAs مرز فضایی جسم است y1�1، اما LULC شی ایکس1ایکس1 isNotSameAs LULC of y1�1; ما می توانیم استنباط کنیم که تغییرات LULC بین دو مهر زمانی اتفاق افتاده است. توجه داشته باشید که روابطی مانند ” isSameAs ” و ” isNotSameAs ” ویژگی های از پیش تعریف شده در هستی شناسی LULCC هستند. قانون را می توان به صورت زیر نوشت:
h a s Sp a t i a l B o u n dیک سال _( ؟ایکس1، _ل1) ∧ h a s Sp a t i a l B o u n dیک سال _( ؟y1، _ل2) ∧h a s L UL C( ؟ایکس1، _z1) ∧ h a s L UL C( ؟y1، _z2) ∧من اس _a m e A s ( ?ل1، _ل2) ∧من N هستمo t Sa m e A s ( ?z1، _z2)⎫⎭⎬⎪⎪⎪⎪⎪⎪⎪⎪⟹ L UL Cسی( ؟ایکس1، _y1)ℎ�����������������(?�1,?�1)∧ℎ�����������������(?�1,?�2)∧ℎ������(?�1,?�1)∧ℎ������(?�1,?�2)∧��������(?�1,?�2)∧�����������(?�1,?�2)}⟹���سیسی(?ایکس1،?�1)
جایی که ل1�1و ل2ل2، و z1�1و z2�2نشان دهنده مرزهای فضایی و انواع LULC برای اشیا است ایکس1ایکس1و y1�1. من L U هستم L Cسی( ؟ایکس1، _y1)منس ���سیسی(?ایکس1،?�1)نشان دهنده تابعی برای بررسی اینکه آیا مقداری تغییر LULC برای یک شی وجود دارد یا خیر.
قانون 2: با توجه به دو شی ایکس1ایکس1و ایکس2ایکس2، ایکس1ایکس1در نقطه زمانی وجود دارد تی1تی1، و y1�1در نقطه زمانی وجود دارد تی2تی2( تی1<تی2تی1<تی2). فرض ایکس1ایکس1دارای مرز فضایی از ل1ل1، و y1�1مرز فضایی است ل2ل2. اگر ل1ل1کاملا درون است ل2ل2، سپس یک فرآیند ادغام از رخ می دهد تی1تی1به تی2تی2، از آنجا که y1�1باید از ادغام میان آمده باشد ایکس1ایکس1و اشیاء دیگر قوانین تعیین یک فرآیند ادغام را می توان در بیان (2) رسمی کرد:
h a s Sp a t i a l B o u n dیک سال _( ؟ایکس1، _ل1) ∧ h a s Sp a t i a l B o u n dیک سال _( ؟ایکس2، _ل2) ∧هس من ( _ _ _ _ل1،ل2) ∧من N هستمo t Sa m e A s ( ?ل1، _ل2)⎫⎭⎬⎪⎪⎪⎪⎪⎪⎪⎪⟹ m e r ge In t o ( ?ایکس1، _ایکس2)ساعتآساسپآتیمنآلب�تو�دآ��(?ایکس1،?ل1)∧ساعتآساسپآتیمنآلب�تو�دآ��(?ایکس2،?ل2)∧�منتیساعتمن�(ل1،ل2)∧منسن�تیاسآمترهآس(?ل1،?ل2)}⟹متره��همن�تی�(?ایکس1،?ایکس2)
قانون 3: با توجه به یک شی ایکس1ایکس1، که در زمان وجود دارد تی1تی1، و yمن�من{ i ≥ 1} هر شیئی است که در آن وجود دارد تی2تی2( تی1<تی2تی1<تی2)، فرض ایکس1ایکس1دارای مرز فضایی از ل1ل1، و yمن�منمرز فضایی است لyمنل�من; یک فرآیند تقسیم را می توان تعیین کرد اگر ایکس1ایکس1با بیش از yمن�مندر زمان تی2.تی2.قوانین تعیین یک فرآیند تقسیم را می توان در بیان (3) رسمی کرد:
h a s Sp a t i a l B o u n dیک سال _( ؟ایکس1، _ل1) ∧ h a s Sp a t i a l B o u n dیک سال _( ؟yمن، _لyمن)∃ yمن، من اینطور نیستم ( _ _ _ _ _ _ _ل1،لyمن) ∧k = c o u n t (yمن) > 1⎫⎭⎬⎪⎪⎪⎪⎪⎪⎪⎪⟹ Sp l i t ( ?ایکس1، _ {yمن| i = 1 , 2 .. k } )ساعتآساسپآتیمنآلب�تو�دآ��(?ایکس1،?ل1)∧ساعتآساسپآتیمنآلب�تو�دآ��(?�من،?ل�من)∃ �من،من�تیه�سهجتیس(ل1،لyمن)∧ک=ج�تو�تی(�من)>1}⟹اسپلمنتی(?ایکس1،?{�من|من=1،2..ک})
قوانین بالا منطق استدلال اساسی را برای استنباط اینکه آیا یک تغییر LULCC بین دو مهر زمانی از نظر تغییرات ویژگی (قانون 1) و تغییرات مکانی (قوانین 2 و 3) رخ داده است را پوشش می دهد. این قوانین را می توان برای ایجاد قوانین پیچیده ترکیب کرد که هم تغییرات مکانی و هم زمانی را مدل می کند. اجرای فرآیندهای استدلال (با استفاده از SWRL) نیاز به ادغام استدلال مکانی و منطقی و همچنین پشتیبانی از هستیشناسی LULCC دارد. بخش بعدی پیاده سازی یک موتور پرس و جو معنایی و استدلال مکانی فعال شده را به تفصیل شرح می دهد.
3.3. یک چارچوب نرم افزاری یکپارچه برای پشتیبانی از پرس و جو و استدلال معنایی
برای پشتیبانی از پرس و جو معنایی و استدلال در مورد تغییر LULC به شیوه ای خودکار و هوشمند، هستی شناسی یا پایگاه دانش باید به روشی قابل فهم برای ماشین ایجاد شود. بنابراین، یک پرس و جو معنایی و چارچوب استدلال برای پشتیبانی از پرس و جو پویا و استدلال داده های تغییر، هم به صورت مکانی و هم غیر مکانی ساخته شد. شکل 3 چارچوب نرم افزار سه لایه را برای انجام این کار نشان می دهد.
لایه سمت چپ لایه داده های مکانی است. تصاویر سنجش از راه دور سری زمانی با استفاده از تکنیکهای تحلیل تصویر مبتنی بر شی (OBIA) برای تولید نقشههای طبقهبندی LULC پیش پردازش میشوند. در جزئیات، eCognition برای تقسیمبندی هر تصویر ماهوارهای در مقیاسهای چندگانه (یک مقیاس بالاتر و یک مقیاس پایینتر) استفاده شد. بر اساس نتیجه بهدستآمده از تقسیمبندی در مقیاس پایینتر، طبقهبندی OBIA بیشتر توسط eCognition انجام شد. چندین ویژگی تصویر سطح پایین که معمولاً مورد استفاده قرار میگیرند، از جمله GLCM (ماتریس هموقوع سطح خاکستری)، تجانس GLCM، عدم تشابه GLCM، آنتروپی GLCM، و همچنین میانگین و انحراف استاندارد مناطق تصویر تقسیمشده، برای طبقهبندی انتخاب شدند. پس از دریافت نتیجه طبقه بندی اصلی تولید شده از eCognition، خطاها به صورت دستی بر اساس نتایج یک تقسیم بندی در مقیاس بالاتر تصحیح شدند. توجه داشته باشید که از آنجایی که تمرکز این کار مدلسازی و استدلال معنایی است، کار دستی در فرآیند طبقهبندی برای حذف عدم قطعیتها و اطمینان از نتایج طبقهبندی دقیق معرفی شد.
محصول تولید شده از رویه فوق یک نقشه شطرنجی است و سپس برای تولید یک فایل چند ضلعی بردار می شود که زیربخش های منطقه مورد مطالعه را بر اساس نوع LULC آنها نشان می دهد. این داده های برداری در شکل فایل های ESRI کامپایل می شوند یا به پایگاه داده های فضایی مانند PostGreSQL (SQL: Structured Query Language) وارد می شوند. سپس مجموعه داده از دو بخش تشکیل شده است، بخش فضایی که مرز جغرافیایی هر شی چند ضلعی را ثبت می کند و قسمت الفبایی که ویژگی ها را ثبت می کند، مانند نوع LULC، سال وجود یک شی فضایی و اطلاعات مرتبط ادغام شده از پایگاه های دانش دیگر. .
سپس، دادههای LULC از مخزن داده پشتیبان یا فایلهای شکل با استفاده از GeoTools Feature API [ 46 ] بارگیری میشوند. همانطور که در طرح هستیشناختی تعریف شده در شکل 2 نشان داده شده است، رکوردهای دادهها به صورت سریالی سهگانه شده و با استفاده از Jena API [ 47 ] در ذخیرهگاه سهگانه اصلی Jena نوشته میشوند. قوانین منطقی تعریف شده در بخش 3.2 نیز به فروشگاه داده Jena وارد می شوند. این جریان آمادهسازی دادهها به شیوهای قابل فهم برای ماشین، پشتیبانی قوی از روش استدلال نشاندادهشده در «لایه استدلال معنایی» فراهم میکند.
در ابتدا، یک مدیر هستی شناسی، که همه داده ها و ماژول های استدلال را اجرا و هماهنگ می کند، ساخته می شود. این مدیر مستقیماً به دو جزء دستور می دهد: کارخانه استدلال و کارخانه داده OWL. کارخانه داده OWL مسئول بارگیری داده های معنایی از فروشگاه سه گانه Jena برای پشتیبانی از پرس و جوهای معنایی مختلف در قالب استاندارد SPARQL (زبان پرس و جو معنایی وب) [ 48 ] است. این مؤلفه فقط از پرس و جوهای داده های ثابت در فروشگاه سه گانه پشتیبانی می کند. به عبارت دیگر، تنها داده ها و دانشی که از قبل در هستی شناسی وجود دارد، قابل بازگشت هستند. ارائه پاسخ به پرس و جوهای پویا، در جایی که دانش قبلاً ناشناخته است، نیازمند پشتیبانی از مؤلفه کارخانه استدلال است.
همانطور که بحث شد، استدلال موفقیت آمیز در مورد تغییر مکانی و زمانی یک شیء کاربری زمین نه تنها به قابلیت استدلال منطقی قدرتمند متکی است، بلکه به یکپارچگی یکپارچه با فرآیند استدلال مکانی نیز نیاز دارد. قانون 3، فرآیند تقسیم در بخش 3.2 را به عنوان مثال در نظر بگیرید. یکی از شرایط حمایت از تشخیص اینکه آیا یک شی ایکس1ایکس1در مهر زمانی بعدی به چندین شی تقسیم می شود تی2تی2گرفتن تقاطع است ایکس1ایکس1‘s مرز با تمام اشیاء موجود در تی2تی2. این تابع ” تقاطع ” بخشی از تابع استدلال داخلی در Jena نیست. بنابراین، یک پسوند فضایی باید در کارخانه استدلال پیاده سازی شود، و یک رابط پرس و جو GeoSPARQL برای پشتیبانی از ارتباط بین دلیل فضایی و ماژول توسعه فضایی فعال است.
با فعال کردن فضایی قابلیت استدلال معنایی موجود، این چارچوب یکپارچه پشتیبانی جامعی از پرس و جو و استدلال LULCC در مکان و زمان فراهم می کند. در بخش بعدی، کاربرد چارچوب فوق را با استفاده از داده های سنجش از دور سری زمانی در نینگبو، چین شرح می دهیم.
4. تظاهرات و بحث
4.1. داده ها و حوزه مطالعاتی
منطقه مورد مطالعه در این کار، جامعه Wantou در نینگبو، در استان ژجیانگ، چین بود. دو دلیل وجود دارد که ما Wantou را انتخاب کردیم. اول، Wantou دستخوش توسعه سریع شده است. چشم انداز تاریخی، شرایط فعلی و برنامه ریزی آن بسیار مورد توجه دولت محلی است. دوم، اگرچه وانتو یک جامعه روستایی در شهر نینگبو است که عمدتاً از مناطق مسکونی تشکیل شده است، به دلیل محیط طبیعی غالب، پتانسیل زیادی در برنامه ریزی منظر دارد و بنابراین در دوران مدرن بازسازی قابل توجهی شده است. بنابراین، یک تغییر مکانی-زمانی قابل توجهی از سال 2007 تا کنون رخ داده است که آن را به یک مطالعه موردی خوب برای مدلسازی LULCC تبدیل کرده است.
این مطالعه از چهار تصویر سنجش از دور با وضوح بالا (QuickBird) استفاده می کند که در چهار زمان مختلف گرفته شده است ( شکل 4 ). این تصویر شامل وضعیت چشمانداز جامعه Wantou در سالهای 2007، 2009، 2010 و 2012 است. جدول 1 تاریخهای تصویر و ویژگیهای باند را فهرست میکند. به منظور ساخت یک مدل معنایی مکانی برای تغییر اطلاعات استخراج شده از تصاویر سنجش از دور، این چهار تصویر را با استفاده از روش OBIA طبقه بندی و حاشیه نویسی می کنیم و سپس از نرم افزار GIS (یعنی ESRI ArcMap) برای تبدیل نتایج طبقه بندی از داده های شطرنجی به یک شی استفاده می کنیم. فرمت برداری مبتنی بر
Wantou از سه روستا تشکیل شده است، ZhenAiCun (روستای Zhenai)، XiaJiangCun (روستای Xiajiang) و YaoJiangCun (روستای Yaojiang) و پل Wantou. در شکل 4 ، 2007-a، 2009-a، 2010-a و 2012-a تصاویر اصلی QuickBird گرفته شده در سال های 2007، 2009، 2010 و 2012 را نشان می دهد. نتایج طبقه بندی چهار تصویر اصلی با استفاده از رویکرد OBIA فوق الذکر. 2007-c، 2009-c، 2010-c و 2012-c نتایج طبقه بندی GIS تولید شده را به تصویر می کشند. دسته کاربری زمین در رنگ های مختلف نمایش داده می شود. رنگ قرمز زمین مسکونی، قهوه ای، زمین خالی، سبز روشن، زمین کشاورزی، سبز تیره، زمین سبز، نارنجی، خیابان های حمل و نقل، خاکستری، محل ساخت و ساز و آبی، دریاچه ها است. ترکیب کاربری اراضی اجزای فرعی Wantou از سال 2007 تا 2012 درجدول 2 .
4.2. پیاده سازی هستی شناختی برای داده های LULCC
برای محاسبات تشخیص تغییر، ما تمام اشیاء تغییر را با حاشیهنویسیهای کاربری زمین در انجمن Wantou در سالهای 2007، 2009، 2010 و 2012 بهدست میآوریم. ابتدا یک هستیشناسی جغرافیایی با توجه به ساختار هستیشناختی تعریفشده در شکل 2 ایجاد میکنیم تا اشیا تغییر و LULC آنها را در شکل 2 مدل کنیم . منطقه مطالعه ما دانش موجود در هستی شناسی به طور خودکار با استفاده از چارچوب معنایی معرفی شده در بخش 3.3 تولید می شود . در شکل 5 ، ما ارائه بصری کلاس ( شکل 5 الف)، ویژگی ( شکل 5 ب) و فرد ( شکل 5) را نشان می دهیم.ج، د) تعاریف قطعه هستی شناسی. هستی شناسی شامل پنج کلاس است: تغییر شی، تصویر ماهواره ای، بعد فضایی، بعد زمانی و بعد موضوعی.
کلاس “Change_Object” برای سازماندهی اشیاء مکانی که حاوی تغییرات LULC در طول زمان هستند، تعریف شده است. “روستا” در متن این مطالعه به عنوان زیر طبقه آن تعریف شده است. کلاس “Satellite_Image” حاوی اطلاعات کلیدی برای توصیف داده های تصویری مورد استفاده در تجزیه و تحلیل LULCC است. این شامل سه زیر کلاس است: (1) “Image_Feature”، که به ویژگی های سطح پایین مختلفی که یک تصویر دارد، مانند رنگ، شکل یا بافت اشاره دارد. (2) “Image_Space” وسعت فضایی و وضوح تصویر ماهواره ای را توصیف می کند. و (3) “Meta_information” شامل نام تصویر، حسگر مورد استفاده برای به دست آوردن اطلاعات تصویر و مهر زمانی است که یک تصویر در آن گرفته شده است. سه کلاس دیگر که در این هستی شناسی تعریف شده اند عبارتند از: بعد مکانی (مکان)، بعد زمانی و بعد موضوعی یک شیء تغییر.
علاوه بر تعریف کلاس، ما همچنین دو نوع ویژگی را تعریف می کنیم: ویژگی شی و ویژگی داده. از ویژگی شی عمدتاً برای اتصال یک موضوع و شی استفاده می شود که هر دو از یک کلاس خاص در ساختار سه گانه “موضوع-مشمول-ابژه” هستند. همانطور که در شکل 5 ب نشان داده شده است، روابط توپولوژیکی مختلف به عنوان ویژگی های شی تعریف می شوند تا رابطه بین اشیاء تغییر را نشان دهند. هنگامی که محدوده مقدار یک ویژگی (همچنین به عنوان گزاره نیز شناخته می شود) یک نوع داده بومی مانند اعداد، رشته ها یا زمان است که توسط استاندارد OWL پشتیبانی می شود، آنها به عنوان یک ویژگی داده تعریف می شوند.
پس از تعریف کلاس ها و ویژگی ها، هستی شناسی نمونه سازی می شود. شکل 5c,d تعریف سه گانه را برای تصویر QuickBird (که فردی از کلاس “Satellite_Image” است) و یک مثال تغییر شی به نام “2010_R1” که از تصویر تقسیم شده است را نشان می دهد. برای تصویر، نام، وسعت جغرافیایی، نام حسگر، وضوح فضایی و سیستم مختصات مورد استفاده برای پردازش داده ها را تعریف می کنیم. برای شی تغییر “2010_R1″، مساحت، هندسه مرزی، زمان وجود، هویت و نوع LULC کدگذاری میشود. توجه داشته باشید که ما روابط توپولوژیکی هاردکد نمی کنیم. در عوض، این دانش به صورت پویا از طریق یک فرآیند استدلال معنایی مبتنی بر دانش شناخته شده در هستی شناسی به دست می آید. دلیل این امر این است که دانش در مورد روابط توپولوژیکی همیشه برای مدلسازی دستی بسیار زیاد است، به خصوص زمانی که منطقه مورد مطالعه بزرگ است و در طول زمان دستخوش تغییر کاربری چشمگیر شده است. به عنوان مثال، اگر وجود داشته باشدn شیء در یک صحنه تصویر در یک مهر زمانی، سه گانه تعیین کننده روابط توپولوژیکی (تعداد کل: m ) بین این اشیاء فضایی می تواند به تعداد m *n2متر*�2. بنابراین تعریف آنها به صورت دستی یک رویکرد مقیاس پذیر نیست [ 10 ]. برای اطمینان از یک فرآیند استدلال موفق و پویا، هر شیء تغییری با اطلاعات هندسی آن کدگذاری میشود (سهگانه با ویژگی ” hasBoundary_Geometry ” در شکل 5 د) را ببینید. چارچوب استدلال معنایی و فضایی یکپارچه یک استنتاج فضایی ایجاد می کند و روابط توپولوژیکی را بین اشیاء تغییر مختلف در پرواز استخراج می کند.
4.3. تغییر پرس و جو اطلاعات بر اساس استدلال معنایی
به منظور آزمایش مدل معنایی مکانی خود، ما مجموعه ای از پرس و جوهای معنایی را بر اساس مدل هستی شناسی LULCC با استفاده از داده های Wantou به عنوان مطالعه موردی طراحی کردیم. سه پرس و جو اطلاعات LULC فعلی یک شی فضایی، مسیر تاریخی LULCC و روند LULCC آن را کشف کردند. زبان پرس و جو در زبان پرس و جوی وب معنایی SPARQL کدگذاری شده است. در زیر، ما سه سؤال را مطرح میکنیم که هر کدام نشاندهنده یک پرسش برای نشان دادن استدلال کاربری زمین است که توسط ابزار استدلال پشتیبانی میشود.
از آنجایی که تنوع بسیار پیچیده ای از کاربری زمین در جامعه Wantou وجود دارد، ما سه شیء تغییر را برای نمایش انتخاب می کنیم. ابتدا ZhenAiCun (ID: 2012_Z) را در سال 2012 انتخاب می کنیم تا اطلاعات LULC فعلی آن را نشان دهیم. سپس، مسیر تاریخی LULCC برای شی زمین فضایی دریاچه Xinhu (ID: 2012_O) قبل از سال 2012 نشان داده شده است. در سال 2012، قسمت شمالی دریاچه 2012_O1 متعلق به ZhengAiCun و قسمت جنوبی 2012_O2 متعلق به XiaJiangCun است. در نهایت، روند LULCC را در شیء جغرافیایی Miaoqianzhou (ID: 2009_E1) از سال 2009 تا 2012 نشان میدهیم.
نتایج پرس و جو، ارائه شده در شکل 6 ، نشان می دهد که روش مدل سازی معنایی ما می تواند از پرس و جوهای مکانی معنایی برای اطلاعات تغییر تصاویر سنجش از دور پشتیبانی کند. به عبارت دیگر، قوانین، محدودیتها، شرایط فعلی، مسیر تاریخی و گرایشهای هر شیء تغییر یا مجموعه شی تغییر را میتوان با استفاده از ترکیبی از ویژگیها و روابط مختلف (یا کلاسها، افراد و خصوصیات در Protégé) در هستیشناسی ما یافت.
نتیجه پرس و جو SPARQL در شکل 6 a نشان می دهد که ترکیب LULC در ZhenAiCun (2012_Z) در سال 2012 شامل زمین های مسکونی (2012_Z1)، زمین های کشاورزی (2012_Z2)، سایت ساخت و ساز (2012_Z3)، زمین سبز (2012_Z4) و دریاچه است. ). شکل 7 الف نقشه کاربری اراضی آن را نشان می دهد. نتیجه پرس و جو SPARQL در شکل 6 ب، مسیر تاریخی LULC دریاچه Xinhu (2012_O) را بین سالهای 2009 و 2012 نشان میدهد. تغییرات طی دوره 2010 تا 2012 با استفاده از خطوط نارنجی نشان داده شده است، و تغییرات از 2019 به 2009 نشان داده شده است. با استفاده از خطوط صورتی در شکل 7 نشان داده شده است. در سال 2012، دریاچه Xinhu (2012_O) تا حدی در ZhenAiCun و XiaJiangCun قرار دارد. در واقع، بخشی از دریاچه Xinhu در ZhenAiCun (2012_O1) زمانی زمین خالی (2010_O1)، زمین کشاورزی (2010_O2 و 2010_O4) و زمین مسکونی (2010_O3) در سال 2010 بود. 2010_O5) در سال 2010. با ردیابی به سال 2009، زمین خالی (2010_O1) در ZhenAiCun در سال 2009 مسکونی بود. زمین های کشاورزی و منطقه مسکونی در قسمت جنوبی عمدتاً بدون تغییر باقی مانده اند. در حالی که بخش جنوبی دریاچه Xinhu در XiaJiangCun در سال 2009 کاملاً مسکونی است، در سال 2010 خالی شد (2010_O1). دو منطقه مسکونی اصلی در هر دو روستا وجود دارد که به زمین های خالی تبدیل شده اند و در انتظار ساخت و ساز هستند، که نشان می دهد بازسازی قابل توجهی بین 2009 وجود دارد. و 2010.
نتیجه پرس و جو SPARQL در شکل 6 c روند LULCC را در Miaoqianzhou (2009_E1) از 2009 تا 2012 نشان می دهد. تغییرات از 2009 تا 2010 با استفاده از خطوط آبی روشن و تغییرات از 2010 به خطوط آبی تیره با استفاده از شکل 201 نشان داده شده است . 7. در سال 2009، کل منطقه Miaoqianzhou مسکونی است. در سال 2010، حدود نیمی از میائوکیانژو تخریب شد و زمین خالی شد (2010_E2 و 2010_E4). بخش کوچکی در جنوب غربی وجود دارد که به زمین کشاورزی تبدیل شده است (2010_E5). در سال 2012، بخش بزرگی از Miaoqianzhou (2012_E2، 2012_E5، 2012_E7، 2012_E8 و 2012_E9) در دست ساخت بود. بخشهایی از زمین خالی 2010_E2 در سال 2010 به منطقه دریاچه (2012_E6 و 2012_E11) و زمین سبز (2012_E12) توسعه یافت. واضح است که اکثر ساخت و سازها در سال 2012 تکمیل شد و یک جامعه جدید ایجاد شده بود. روابط دقیق در این سه نتیجه پرس و جو در شکل 7 نشان داده شده است .
به طور خلاصه، با پشتیبانی از مدل معنایی و استدلال ما، به دست آوردن تغییرات کاربری زمین که هم به سمت عقب و هم به جلو از یک نقطه در زمان حرکت می کنند، ساده و آسان است.
5. آزمایشات
برای تایید مقیاس پذیری چارچوب نرم افزاری پیشنهادی، ما یک سری آزمایشات را با استفاده از مجموعه داده های شبیه سازی شده انجام دادیم که شامل اشیاء فضایی چند ضلعی است که با ضریب 2 از 5000 به 80000 افزایش می یابد. این اشیاء، اندازه های سه گانه برای مجموعه داده های شبیه سازی شده به ترتیب 80000، 160000، 320000، 640000 و 1280000 می شوند. همان پرس و جو معنایی غیر مکانی (ارائه شده در شکل 6 الف) و پرس و جوهای مکانی-زمانی و معنایی (ارائه شده در شکل 6)ب، ج) با استفاده از مجموعه داده بزرگ مورد آزمایش قرار گرفتند. آزمایشهای ما روی یک سرور Dell PowerEdge با حافظه 8G، یک CPU 6 هستهای، 3.4 گیگاهرتز، دیسک ذخیرهسازی 1 ترابایتی و یک سیستم عامل Ubuntu Server v14.04 انجام شد. Jena همراه در نرم افزار Apache Apache-Jena-3.0.0 برای پیاده سازی پلت فرم معنایی استفاده شد که دسترسی به وب را امکان پذیر می کند.
شکل 8 میانگین زمان پاسخگویی از صد بار اجرا برای هر پرس و جو را نشان می دهد تا نتایج پرت را به دلیل مشکل شبکه یا استفاده بیش از حد ناگهانی سیستم حذف کند. همانطور که مشاهده می شود، برای پرس و جو معنایی غیرمکانی در مورد ترکیب کاربری زمین ( شکل 6 a مورد)، زمان پاسخ سیستم بسیار سریع است (زیر 25 میلی ثانیه) برای همه مجموعه های سه گانه ( شکل 8 a را ببینید). این واقعیت که زمان پاسخ تحت تأثیر اندازه سهگانه قرار نمیگیرد، مقیاسپذیری سیستم توسعهیافته را برای رسیدگی به چنین پرسشهای معنایی تأیید میکند. این نتیجه خوب به تکنیک نمایه سازی متن کامل آپاچی لوسن که در Web Jena پلت فرم معنایی ما معرفی شده است نسبت داده می شود. نتایج برای پرس و جوهای فضایی، در مقایسه، الگوهای متفاوتی را نشان میدهند. در دو پرس و جو فضایی که آزمایش کردیم، یکی ( شکل 6حالت b) شامل عملگر فضایی “شامل” است، و دیگری ( شکل 6 مورد ج) شامل عملگر فضایی “تقاطع” است. از شکل 8 قابل مشاهده و نتیجه گیری استb که: (1) زمان پاسخگویی این دو پرس و جو فضایی تقریباً یکسان است. (2) از آنجایی که پرس و جوهای فضایی مستلزم محاسبات بیشتری هستند، زمان پاسخ آنها کندتر از پرس و جوهای غیرمکانی است، که معمولاً می تواند بلافاصله انجام شود. (3) اگرچه زمان بیشتری برای بدست آوردن نتایج برای پرس و جوهای فضایی پیچیده طول می کشد، سیستم هنوز به خوبی مقیاس می شود. فقط یک افزایش خطی مشاهده می شود: با دو برابر شدن تعداد سه گانه های درگیر در محاسبه، زمان پاسخ تقریباً دو برابر می شود. این آزمایشها مقیاسپذیری خوب سیستم پیشنهادی را در پاسخگویی معنایی به سؤالات فضایی و غیرمکانی نشان میدهد.
6. نتیجه گیری
این مقاله توسعه و اجرای یک چارچوب محاسباتی را برای پشتیبانی از مدلسازی، استدلال معنایی و مکانی اطلاعات تغییر با توجه به فضا، زمان و توپولوژی معرفی میکند. مرکز سیستم یک موتور استدلالی است که قادر است دانش موجود و قواعد معنایی را برای استنتاج دانش جدید پویا برای تفکر فضایی پیوند دهد. پایگاه دانشی که سیستم بر آن تکیه میکند در هستیشناسی کدگذاری میشود که ویژگیهای مختلف (به عنوان مثال، تصویر، فضایی، زمانی) یک شی فضایی واحد و روابط فضایی بین اشیاء مختلف را مدلسازی میکند. مطالعات قبلی در مورد مدلسازی LULCC فاقد یک رویکرد مبتنی بر دانش برای ارتباط نتایج تشخیص تغییر با اطلاعات جغرافیایی در GIS یا پایگاههای اطلاعاتی مکانی است. کار ما هر دو جنبه اطلاعات تغییر را در مدل هستیشناختی پیشنهادی با تبدیل معناشناسی تصویر، مکانی، زمانی و موضوعی در مدل معنایی LULCC ادغام میکند. علاوه بر این، این مدل به استفاده در مطالعات LU محدود نمی شود. به طور کلی برای سایر کاربردها، مانند مدیریت جنگل، تغییرات آب و هوا و نظارت بر آتش سوزی که نیاز به استفاده گسترده از داده های جغرافیایی دارند، قابل استفاده است. کمک مهم دیگر این کار، پیشنهاد راههایی برای ادغام هستیشناسی قابل درک ماشین، قوانین استدلال، دادههای مکانی-زمانی، و همچنین موتور استنتاج به طور یکپارچه در یک چارچوب نرمافزار عملیاتی برای پشتیبانی از پرس و جو، استدلال و تجسم در جریان است. از اطلاعات تغییر این مدل محدود به استفاده در مطالعات LU نیست. به طور کلی برای سایر کاربردها، مانند مدیریت جنگل، تغییرات آب و هوا و نظارت بر آتش سوزی که نیاز به استفاده گسترده از داده های جغرافیایی دارند، قابل استفاده است. کمک مهم دیگر این کار، پیشنهاد راههایی برای ادغام هستیشناسی قابل درک ماشین، قوانین استدلال، دادههای مکانی-زمانی، و همچنین موتور استنتاج به طور یکپارچه در یک چارچوب نرمافزار عملیاتی برای پشتیبانی از پرس و جو، استدلال و تجسم در جریان است. از اطلاعات تغییر این مدل محدود به استفاده در مطالعات LU نیست. به طور کلی برای سایر کاربردها، مانند مدیریت جنگل، تغییرات آب و هوا و نظارت بر آتش سوزی که نیاز به استفاده گسترده از داده های جغرافیایی دارند، قابل استفاده است. کمک مهم دیگر این کار، پیشنهاد راههایی برای ادغام هستیشناسی قابل درک ماشین، قوانین استدلال، دادههای مکانی-زمانی، و همچنین موتور استنتاج به طور یکپارچه در یک چارچوب نرمافزار عملیاتی برای پشتیبانی از پرس و جو، استدلال و تجسم در جریان است. از اطلاعات تغییر
چندین پسوند احتمالی برای این تحقیق وجود دارد. اول، ما در حال پیادهسازی و یکپارچهسازی چارچوب هستیشناسی فضایی و استدلال در یک چارچوب زیرساخت سایبری عملیاتی برای پشتیبانی از جستوجو و تصمیمگیری مشترک LULCC هستیم. یک نمونه اولیه ایجاد شده است [ 49]. به منظور پرداختن به چالشهای محاسباتی در مدیریت و استدلال (میلیارد سطح) دادههای LULCC بزرگ، ما در حال گسترش مدل استدلال ستون فقرات برای توسعه یک چارچوب معنایی مقیاسپذیر هستیم که میتواند پشتیبانی با کارایی بالا برای نمایهسازی فضایی، پرس و جو و استدلال فراهم کند. در نهایت، تعریف هستیشناختی کلاسها و نمونهها در این کار بر روی اشیاء جغرافیایی گسسته متمرکز است. این به ما این امکان را میدهد که این مدل هستیشناختی را برای توصیف رسمی صحنههای جغرافیایی که هم اشیا و هم روابط بین اشیاء را شامل میشوند، گسترش دهیم. ما بر این باوریم که کار ما از نظر ارائه راهحلهای مفهومی و عملی برای مدلسازی معنایی و استدلال دادههای تغییر کمک بزرگی میکند و برای جوامع گستردهتر Semantic Web و GIScience سود زیادی خواهد داشت.
منابع
- بامباکوس، ام. یانگ، سی. ایوانز، جی. لی، ز. لی، دبلیو. Huang, Q. به اشتراک گذاری اطلاعات علوم زمین برای پشتیبانی از سیستم جهانی مشاهده زمین از سیستم ها (GEOSS). در مجموعه مقالات IGARSS 2008-2008 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، بوستون، MA، ایالات متحده، 6-11 ژوئیه 2008.
- یانگ، سی. لی، دبلیو. زی، جی. Zhou، B. پردازش اطلاعات مکانی توزیع شده: به اشتراک گذاری منابع جغرافیایی توزیع شده برای پشتیبانی از زمین دیجیتال. بین المللی جی دیجیت. زمین 2008 ، 1 ، 259-278. [ Google Scholar ] [ CrossRef ]
- لیو، بی. وانگ، ام. هنگ، RC; ژا، زجی؛ Hua، XS یادگیری مشترک برچسب ها و متریک فاصله. IEEE Trans. سیستم Man Cybern Part B 2010 , 40 , 973-978. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، دبلیو. یانگ، CW; نبرت، دی. راسکین، آر. هاوسر، پی. وو، اچ. Li, Z. کشف و زنجیرهسازی سرویس وب مبتنی بر معنایی برای ساخت زیرساخت دادههای فضایی قطب شمال. محاسبه کنید. Geosci. 2011 ، 37 ، 1752-1762. [ Google Scholar ] [ CrossRef ]
- آلبالاوی، EK; کومار، ال. استفاده از فناوری سنجش از دور برای شناسایی، مدلسازی و نقشهبرداری بیابانزایی: یک بررسی. J. Food Agric. محیط زیست 2013 ، 11 ، 791-797. [ Google Scholar ]
- کلاین، آی. دیتز، ای جی. گسنر، یو. گالاوا، ا. میرزاخمتوف، آ. Kuenzer, C. ارزیابی گستره آب فصلی در آسیای مرکزی در 27 سال گذشته برگرفته از داده های سنجش از دور با وضوح متوسط. بین المللی جی. جئوگر. Inf. 2014 ، 26 ، 335-349. [ Google Scholar ] [ CrossRef ]
- کندی، RE; تاونسند، پی. گراس، JE; کوهن، WB; بولستاد، پی. وانگ، YQ; آدامز، پی. ابزارهای تشخیص تغییر سنجش از دور برای مدیران منابع طبیعی: درک مفاهیم و مبادلات در طراحی پروژه های نظارت بر چشم انداز. سنسور از راه دور محیط. 2009 ، 113 ، 1382–1396. [ Google Scholar ] [ CrossRef ]
- هماندوانا، ح. Eckardt، F. چاندا، آر. پیوند دادههای بایگانی و سنجش از راه دور برای نظارت طولانیمدت محیطی. بین المللی J. Appl. زمین Obs. اطلاعات جغرافیایی 2005 ، 7 ، 284-298. [ Google Scholar ] [ CrossRef ]
- ماچانوف، م. تئودورو، ا. شرودر، سی. تعریف معیار برای شناسایی مرزهای فیزیکی- جغرافیایی واحه خوارزم از طریق داده های سنجش از دور. محیط زیست نظارت کنید. ارزیابی کنید. 2016 ، 188 ، 1-14. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- آرناس، اچ. هاربلوت، بی. Cruz, C. LC3: یک مدل داده مکانی-زمانی برای مطالعه تغییرات پوشش زمین واجد شرایط. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . Ahlqvist, O., Varanka, D., Fritz, S., Janowicz, K., Eds. CRC Press: Boca Raton، FL، USA، 2015; ص 211-242. [ Google Scholar ]
- شی، ایکس. روابط فضایی در هستی شناسی های فضایی کجاست؟ Proc. Natl. آکادمی علمی USA 2011 , 108 , E459. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- گریب، WJ; Czerniak، RJ سیستم های طبقه بندی کاربری / پوشش زمین و رابطه آنها با برنامه ریزی زمین. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . CRC Press: Boca Raton، FL، USA، 2015; صص 1-18. [ Google Scholar ]
- لو، دی. ماوزل، پ. برودیزیو، ای. موران، ای. تکنیک های تشخیص تغییر. بین المللی J. Remote Sens. 2004 ، 25 ، 2365-2407. [ Google Scholar ] [ CrossRef ]
- Ahlqvist, O. گسترش تشخیص تغییر پس از طبقه بندی با استفاده از معیارهای تشابه معنایی برای غلبه بر ناهمگونی طبقاتی: مطالعه ای در مورد تغییرات پایگاه داده پوشش زمین ملی ایالات متحده در سال های 1992 و 2001. سنسور از راه دور محیط. 2008 ، 112 ، 1226-1241. [ Google Scholar ] [ CrossRef ]
- لیو، ZG; دزرت، ج. مرسیه، جی. Pan، Q. استدلال اثباتی پویا برای تشخیص تغییر در تصاویر سنجش از دور. IEEE Trans. Geosci. Remote 2012 ، 50 ، 1955-1967. [ Google Scholar ] [ CrossRef ]
- بیورک، ا. Skånes، H. نیاز به آگاهی از شکل پذیری معنایی در هماهنگ سازی بین المللی اطلاعات جغرافیایی: از دیدگاه طبقه بندی جنگل های شمال اروپا دیده می شود. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . CRC Press: Boca Raton، FL، USA، 2015; ص 41-58. [ Google Scholar ]
- Anderson, JR A سیستم طبقه بندی کاربری و پوشش زمین برای استفاده با داده های سنسور از راه دور . دفتر چاپ دولت ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، 1976.
- آژانس محیط زیست اروپا (EEA). راهنمای فنی پوشش زمین CORINE: الحاقیه 2000. موجود به صورت آنلاین: http://www.eea.europa.eu/publications/tech40add (در 10 فوریه 2016 قابل دسترسی است).
- انجمن برنامه ریزی آمریکا استانداردهای طبقه بندی مبتنی بر زمین. 2001. در دسترس آنلاین: https://www.planning.org/lbcs/standards/pdf/InOneFile.pdf (دسترسی در 10 فوریه 2016).
- Di Gregorio, A. سیستم طبقه بندی پوشش زمین: مفاهیم طبقه بندی و راهنمای کاربر. در دسترس به صورت آنلاین: http://www.fao.org/docrep/008/y7220e/y7220e00.HTM (در 10 فوریه 2016 قابل دسترسی است).
- هریسون، پایگاه داده ملی کاربری اراضی AR : طبقه بندی کاربری و پوشش زمین ; O. دفتر معاون نخست وزیر، اد. چاپگر ملکه و کنترل کننده دفتر لوازم التحریر اعلیحضرت: لندن، انگلستان، 2006.
- Jansen, LJ رویکردهای پارامتری برای طبقه بندی کاربری و پوشش زمین. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . CRC Press: Boca Raton، FL، USA، 2015; صص 59-84. [ Google Scholar ]
- Annoni، A. INSPIRE: زیرساخت اطلاعات مکانی در اروپا. در مجموعه مقالات نهمین EC GIS&GI A، Coruna، اسپانیا، 25-27 ژوئن 2003.
- ریپس، ال جی. شوبن، ای جی; اسمیت، EE فاصله معنایی و تأیید روابط معنایی. J. یادگیری کلامی. رفتار کلامی 1973 ، 12 ، 1-20. [ Google Scholar ] [ CrossRef ]
- Tversky، A. ویژگی های مشابهت. روانی Rev. 1977 , 84 , 327-352. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. راسکین، آر. Goodchild، MF اندازهگیری شباهت معنایی مبتنی بر دانش کاوی: یک رویکرد شبکه عصبی مصنوعی. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1415-1435. [ Google Scholar ] [ CrossRef ]
- سنا، دبلیو. روشهای مبتنی بر ساختار کروز، IF برای تقویت همترازی هستیشناسی جغرافیایی. در معناشناسی جغرافیایی ; Springer: برلین/هایدلبرگ، آلمان، 2007; صص 82-97. [ Google Scholar ]
- گلدستون، شباهت RL، فعال سازی تعاملی و نقشه برداری. J. Exp. روانی فرا گرفتن. مم شناخت. 1994 ، 20 ، 3-28. [ Google Scholar ] [ CrossRef ]
- لین، دی. تعریف نظری اطلاعاتی از شباهت. ICML 1998 ، 98 ، 296-304. [ Google Scholar ]
- کامبر، ا. فیشر، پی. Wadsworth، R. تحلیل متن کاوی همپوشانی معنایی پوشش زمین. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . CRC Press: Boca Raton، FL، USA، 2015; ص 197-204. [ Google Scholar ]
- هورنسبی، ک. Egenhofer، MJ تغییر مبتنی بر هویت: پایه ای برای بازنمایی دانش مکانی-زمانی. بین المللی جی. جئوگر. Inf. علمی 2000 ، 14 ، 207-224. [ Google Scholar ] [ CrossRef ]
- Worboys، MF مدل سازی تغییرات و رویدادها در سیستم های فضایی پویا با ارجاع به واحدهای اجتماعی-اقتصادی. در مجموعه مقالات کنفرانس ESF GISDATA در مورد مدل سازی تغییر در واحدهای اجتماعی-اقتصادی، Napthlion، یونان، 15-19 مارس 1998.
- کلارامونت، سی. جیانگ، بی. یک نمایش یکپارچه از روابط مکانی و زمانی بین مناطق در حال تکامل. جی. جئوگر. سیستم 2001 ، 3 ، 411-428. [ Google Scholar ] [ CrossRef ]
- جیانگ، جی. وربویز، M. توپولوژی مبتنی بر رویداد برای اجرام مسطح پویا. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 33-60. [ Google Scholar ] [ CrossRef ]
- Varanka، DE; Usery، EL یک هستی شناسی کاربردی برای معناشناسی مرتبط با ویژگی های آب سطحی. در کاربرد زمین و معناشناسی پوشش زمین: اصول، بهترین روش ها و چشم اندازها . CRC Press: Boca Raton، FL، USA، 2015; صص 146-168. [ Google Scholar ]
- پراساد، ARD; Guha, N. نامگذاری مفهوم در مقابل طبقهبندی مفهوم: یک رویکرد جنبهدار به حاشیهنویسی معنایی. اطلاعات آنلاین Rev. 2008 , 32 , 500-510. [ Google Scholar ] [ CrossRef ]
- باتساکیس، اس. پتراکیس، EG نشان دهنده دانش زمانی در وب معنایی: رویکرد 4 بعدی فلوئنت توسعه یافته. در ترکیبی از روش ها و کاربردهای هوشمند ; Springer: برلین/هایدلبرگ، آلمان، 2011; صص 55-69. [ Google Scholar ]
- کلاین، جی. Carroll, JJ Resource Description Framework (RDF): Concepts and Abstract Syntax ; W3C: کمبریج، MA، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- مک گینس، دی.ال. Van Harmelen، F. OWL مروری بر زبان هستی شناسی وب. W3C Recomm. 2004 ، 10 ، 1-22. [ Google Scholar ]
- گوتیرز، سی. هورتادو، سی. Vaisman, A. معرفی زمان به RDF. EEE Trans. دانستن مهندسی داده 2007 ، 19 ، 207-218. [ Google Scholar ] [ CrossRef ]
- فراسینکار، اف. Milea، V. Kaymak، U. tOWL: ادغام زمان در OWL . Springer: برلین/هایدلبرگ، آلمان، 2010. [ Google Scholar ]
- کریگر، HU روش شناسی عمومی برای تجهیز هستی شناسی ها به زمان. در دسترس آنلاین: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.168.1549&rep=rep1&type=pdf (در 23 ژوئن 2016 دسترسی پیدا کرد).
- برتا، ک. اسمروس، پی. Koubarakis, M. نمایش و پرس و جو زمان معتبر سه گانه برای داده های زمین مکانی مرتبط. در مجموعه مقالات دهمین کنفرانس وب معنایی گسترده (ESWC 13)، مونپلیه، فرانسه، 26 تا 30 مه 2013.
- هوانگ، ی. دنگ، جی. تحقیق در مورد نمایش اطلاعات مکانی-زمانی جغرافیایی و قوانین استدلال مکانی-زمانی بر اساس ژئوآنتولوژی و SWRL. در مجموعه مقالات کنفرانس بین المللی علوم محیطی و فناوری کاربرد اطلاعات، ووهان، چین، 4 تا 5 ژوئیه 2009.
- Sotirios، B. SOWL: چارچوبی برای مدیریت اطلاعات مکانی-زمانی در OWL. دکتری پایان نامه، دانشگاه فنی کرت، Chania، یونان، 2011. [ Google Scholar ]
- Bledsoe، BP; براون، MC; Raff, DA GeoTools: ابزاری برای تجزیه و تحلیل سیستم رودخانه ای. مربا. منبع آب دانشیار 2007 ، 43 ، 757-772. [ Google Scholar ] [ CrossRef ]
- McBride، B. Jena: یک ابزار وب معنایی. IEEE Int. محاسبه کنید. 2002 ، 6 ، 55-59. [ Google Scholar ] [ CrossRef ]
- Prud’Hommeaux، E. Seaborne، A. SPARQL Query Language for RDF. در دسترس آنلاین: http://www.w3.org/TR/rdf-sparql-query/ (در 23 ژوئن 2016 در دسترس است).
- PolarGlobe. در دسترس آنلاین: http://polar.geodacenter.org/lulcc (در 26 سپتامبر 2016 قابل دسترسی است).

شکل 1. تصویری از چالش های مدل سازی مفهومی معنایی برای کاربری زمین و تغییر پوشش زمین (LULCC). ( الف ) نشان دهنده تغییر LULC برای کل منطقه است. ( ب ) نشان دهنده تغییر LULC محلی یک منطقه است. ( ج ) نشان دهنده تغییر جهانی LULC در منطقه است در حالی که LULC محلی یکسان باقی می ماند.

شکل 2. یک هستی شناسی جغرافیایی برای مدل سازی معنایی اطلاعات تغییر. گره های همرنگ به بخش های فرعی در همان سطح اشاره دارند.
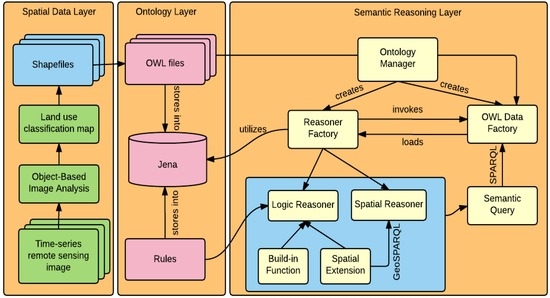
شکل 3. یک چارچوب نرم افزاری یکپارچه برای پرس و جو و استدلال LULCC.
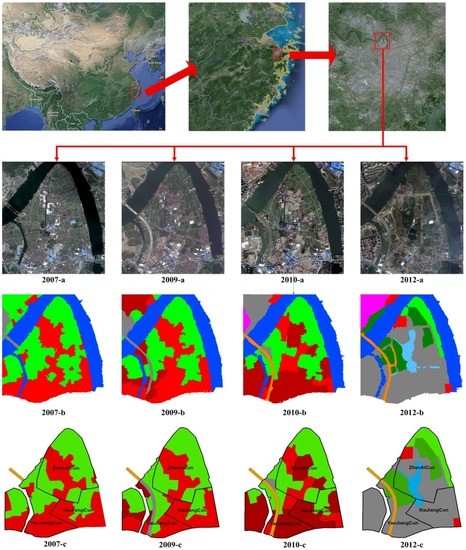
شکل 4. نمایش نمونه های تصویر سنجش از دور ( a )، نتایج طبقه بندی تصویر ( b ) و نتایج تولید GIS ( c ).
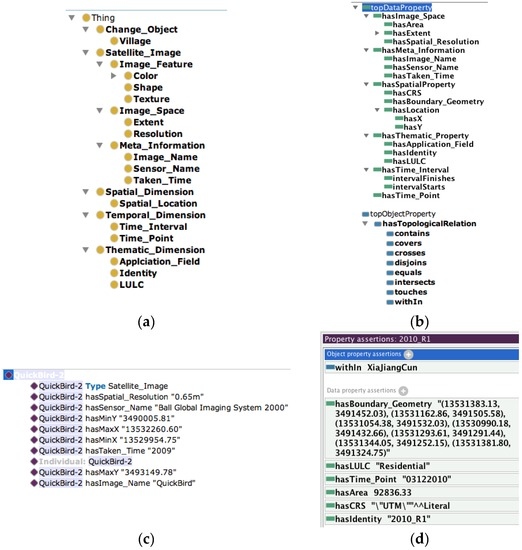
شکل 5. یک بخش هستی شناسی تجسمی برای نمایش مدل سازی معنایی مکانی. ( الف ) همه کلاس ها را تعریف می کند. ( ب ) خصوصیات داده (مانند اطلاعات فراداده در مورد یک تصویر، خصوصیات مکانی و زمانی یک شی فضایی) و همچنین ویژگی شی (مانند روابط توپولوژیکی بین اشیاء مختلف) را تعریف می کند. ( ج ) تعریف بصری سه گانه برای یک تصویر QuickBird که اشیاء فضایی از آن استخراج می شوند. ( د ) یک شی فضایی به نام “2010_R1” و خواص مختلف آن. به عنوان مثال، اطلاعات مرجع مکانی در “hasCRS” (سیستم مرجع مختصات) تعریف شده است.
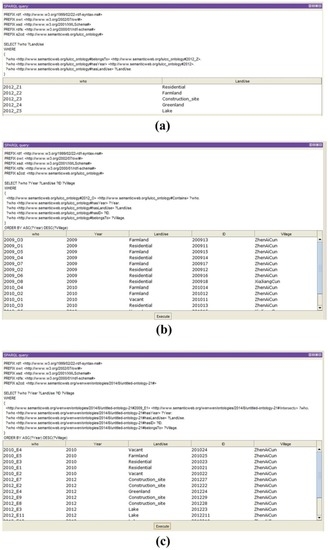
شکل 6. نتایج جستجوی معنایی با استفاده از SPARQL. ( الف ) ترکیب LULC ZhenAiCun (2012_Z) در سال 2012. ( ب ) مسیر تاریخی LULC یک شی فضایی با نام “دریاچه Xinhu”؛ ( ج ) پرس و جو معنایی و نتیجه برای روند LULCC در Miaoqianzhou (2009_E1) از 2009 تا 2012.

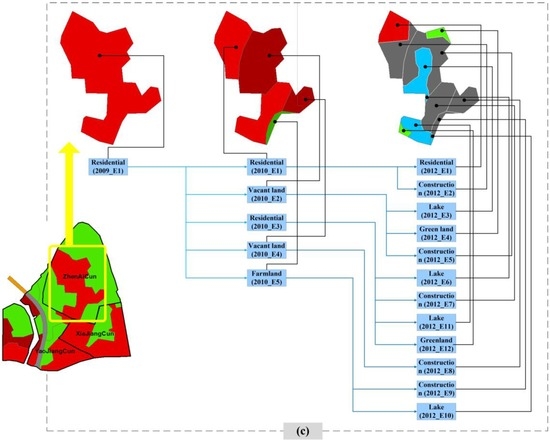
شکل 7. ارائه بصری پرس و جو معنایی در شکل 6 نتیجه می گیرد . ( الف ) استفاده از زمین ZhenAiCun (2012_Z) در سال 2012; ( ب ) مسیر تاریخی استفاده از زمین دریاچه Xinhu (2012_) از 2009 تا 2012. و ( ج ) تمایل تغییر کاربری زمین Miaoqianzhou (2009_E1) از 2009 تا 2012.
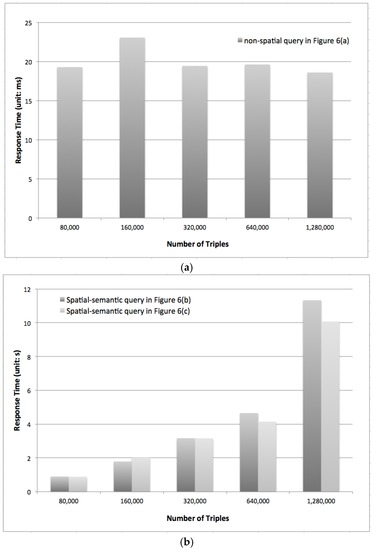
شکل 8. زمان پاسخ سکوی معنایی برای پرس و جوهای معنایی غیر مکانی و مکانی. ( الف ) زمان پاسخ برای پرس و جو معنایی غیر مکانی. ( ب ) زمان پاسخ برای پرس و جوهای مکانی- معنایی.

جدول 1. اطلاعات دقیق در مورد تصاویر QuickBird در حال استفاده.
جدول 2. ترکیب کاربری اراضی جامعه Wantou (2.45 کیلومتر مربع در مساحت) از سال 2007 تا 2012.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر