

خلاصه
استاندارد زبان نشانه گذاری جغرافیایی کنسرسیوم فضایی باز (OGC) انواع پایه و چارچوبی را برای تعریف مدل های داده های اطلاعاتی جغرافیایی مانند CityGML و IndoorGML ارائه می دهد که مدل های اطلاعات استانداردی را برای مدل سازی سه بعدی شهر و ناوبری سبک داخلی در شبکه ارائه می دهد. اطلاعات مکان، که موتور معنایی است که داده های بزرگ اطلاعات جغرافیایی را ترکیب می کند، در این استانداردها کنار گذاشته می شود. استاندارد ملی چینی GML موقعیت مکانی چند بعدی داخلی (IndoorLocationGML) ارائه شده در این مطالعه می تواند در برنامه های کاربردی هوشمند مکان داخلی در همه جا برای افراد و روبات ها استفاده شود. IndoorLocationGML به عنوان یک مدل اطلاعات موقعیت مکانی چند بعدی داخلی و استاندارد قالب تبادل داده، عمدتاً برای موقعیت یابی و ناوبری داخلی در نظر گرفته شده است. این مقاله ویژگی های اصلی استاندارد را معرفی می کند: (1) اصطلاحات. (2) مدل اطلاعات مکان داخلی با استفاده از نمودار کلاس زبان مدلسازی واحد (UML). (3) زبان نشانه گذاری اطلاعات مکان داخلی بر اساس GML. و (4) موارد استفاده. سپس یک کاربرد معمولی استاندارد مورد بحث قرار می گیرد. این استاندارد برای بیان، ذخیره و توزیع اطلاعات مکان چند بعدی داخلی و برای یکپارچه سازی یکپارچه اطلاعات مکان داخلی و خارجی کاربرد دارد. بنابراین مرجع و مبنای مربوط به ناشران، مدیران، کاربران و توسعه دهندگان ناوبری داخلی و خدمات مبتنی بر مکان (LBS) است. و (4) موارد استفاده. سپس یک کاربرد معمولی استاندارد مورد بحث قرار می گیرد. این استاندارد برای بیان، ذخیره و توزیع اطلاعات مکان چند بعدی داخلی و برای یکپارچه سازی یکپارچه اطلاعات مکان داخلی و خارجی کاربرد دارد. بنابراین مرجع و مبنای مربوط به ناشران، مدیران، کاربران و توسعه دهندگان ناوبری داخلی و خدمات مبتنی بر مکان (LBS) است. و (4) موارد استفاده. سپس یک کاربرد معمولی استاندارد مورد بحث قرار می گیرد. این استاندارد برای بیان، ذخیره و توزیع اطلاعات مکان چند بعدی داخلی و برای یکپارچه سازی یکپارچه اطلاعات مکان داخلی و خارجی کاربرد دارد. بنابراین مرجع و مبنای مربوط به ناشران، مدیران، کاربران و توسعه دهندگان ناوبری داخلی و خدمات مبتنی بر مکان (LBS) است.
کلید واژه ها:
مکان داخلی ؛ خدمات مبتنی بر مکان ؛ استاندارد ؛ جهت یابی
1. تعریف IndoorLocationGML
فناوری خدمات ناوبری و موقعیت یابی برای امنیت ملی، توسعه اقتصادی و معیشت حیاتی است. از اینترنت اشیاء (IoT)، زمین هوشمند، و کاهش بلایا و امداد رسانی از طریق ارائه مدلهای اطلاعاتی اساسی، زیرساختها و خدمات پشتیبانی میکند. با افزایش استفاده از دستگاه های قابل حمل هوشمند و اینترنت همراه، الزامات برای خدمات ناوبری و موقعیت یابی بدون درز داخلی و خارجی بسیار دقیق به سرعت در حال رشد است. محیط داخلی از بسیاری جهات با محیط بیرون متفاوت است. بهطور پیشفرض، اطلاعات فضایی در فضای باز توسط علم اطلاعات جغرافیایی سنتی مدیریت میشود که به سازگاریهای مختلفی برای محیطهای داخلی نیاز دارد. بعد سوم یک عامل اصلی در اطلاعات فضایی داخلی است، زیرا محیط از سطوح متعدد تشکیل شده است. در حالی که فضای بیرون را می توان با یک سطح مشترک نشان داد. برخلاف فضای باز، فضاهای داخلی بسته، باریک، خصوصی و دارای موانع، اشیاء پنهان و بدون سیستم موقعیت یابی جهانی هستند (سیگنال های ماهواره GPS به داخل خانه نمی رسند) [1 ]. بنابراین، مفاهیم اولیه، مدلهای داده و استانداردهای اطلاعات فضای باز مناسب نیستند [ 2 ، 3 ]، اما کاربران نهایی همچنان به اطلاعات یکپارچه، مفید و قابل اعتماد داخلی نیاز دارند.
سازمان بینالمللی استاندارد (ISO)، OGC و بسیاری از استانداردهای ملی در سراسر جهان بر استانداردسازی اطلاعات مکانی و مدلهایی تمرکز دارند که از برنامههای مرتبط با اطلاعات جغرافیایی پشتیبانی میکنند. OGC سه استاندارد مرتبط با مطالعه ما ایجاد کرده است. اولی، استاندارد رمزگذاری OpenGIS Geography Markup Language (GML) بسیاری از استانداردهای ISO قبلی را جذب کرده و مدل های جغرافیایی فراگیر را ارائه می دهد [ 4]]. دوم، استاندارد رمزگذاری زبان نشانه گذاری جغرافیای شهر OGC (CityGML)، بر اساس GML، یک مدل سه بعدی با وضوح چندگانه را شامل اطلاعات هندسی، معناشناسی، توپولوژی و ظاهر سازه های مصنوعی در زمینه های شهری یا منطقه ای تعریف می کند. این استاندارد می تواند برای تجزیه و تحلیل و تجسم پیشرفته استفاده شود و از برنامه هایی مانند ناوبری داخلی-خارجی [ 5 ] پشتیبانی می کند. Levels-of Detail (LOD) 4 CityGML اشیاء داخلی بسیار دقیق را تعریف می کند که می توانند برای پشتیبانی از برنامه های مربوط به داخل ساختمان استفاده شوند. سومین استاندارد، استاندارد IndoorGML، به جای نمایش اجزای معماری، بر نمایش ویژگی ها و اتصال فضای داخلی و ارائه ارجاعات ویژگی های فضایی تمرکز دارد [ 3 ].
چندین استاندارد مدلسازی ساختمان سه بعدی مانند CityGML، Keyhole Markup Language (KLM) و Industry Foundation Classes (IFC) با فضای داخلی ساختمان از دیدگاه هندسی، نقشه کشی و معنایی سروکار دارند. حتی مرتبط ترین استاندارد، IndoorGML، تنها بر مدل سازی فضای داخلی برای اهداف ناوبری سبک، مورد نیاز برای اجزای شبکه های ناوبری تمرکز دارد. این استانداردهای موجود فاقد ابزاری برای بیان اولیه ترین اطلاعات مکان داخلی هستند. اطلاعات مکان داخلی موتور معنایی را تشکیل می دهد که داده های بزرگ را یکپارچه می کند، منابع را تجمیع می کند، اطلاعات را ترکیب می کند و مقادیر را تولید می کند و یک ملاحظات مهم در زمینه واکنش اضطراری است [ 6 ، 7]]. موارد استفاده معمول از اطلاعات مکان داخلی عبارتند از نمایش نقشه داخلی، به عنوان مثال، [ 8 ، 9 ، 10 ]، ناوبری برای انسان ها و روبات ها، به عنوان مثال، [ 11 ، 12 ، 13 ، 14 ]، و مدیریت تاسیسات داخلی. برای قادر ساختن مردم و روباتها به آگاهی بیشتر از محیط داخلی، مدلهای مکانیابی چند بعدی داخلی توسعه داده شدهاند و کاربردهای بالقوه آنها بررسی شدهاند [ 15 ، 16 ، 17]]، اما مدلهای توصیف مکان داخلی موجود فقط مفاهیم پایه مطلق و نسبی مکان را ارائه میکنند. آنها فاقد توصیف دقیق رابطه معنایی هستند، که کاربردهای کاربر محور گسترده تر آنها را محدود می کند. چندین سیستم موقعیت یابی چینی اخیراً توسعه یافته اند، از جمله سیستم Beidou Xihe که خدمات بدون درز موقعیت یابی داخلی-خارجی و زمان واقعی را ارائه می دهد، اما هیچ وسیله ای برای محلی سازی نسبی ندارد. بنابراین استاندارد کردن اطلاعات مکان داخلی مورد نیاز است. استاندارد ملی چین برای موقعیت مکانی چند بعدی داخلی GML (IndoorLocationGML) اخیراً با هدف تسهیل توسعه برنامههای کاربردی هوشمند مکان داخلی در همه جا برای افراد و روباتها آغاز شده است. هدف ایجاد یک مدل اطلاعات موقعیت مکانی چند بعدی داخلی و تبادل استاندارد فرمت داده برای موقعیت یابی و ناوبری داخلی است. جزئیات مفاهیم اصلی، مدلها، تعاریف و کاربرد IndoorLocationGML در این مقاله مورد بحث قرار میگیرد.
2. توضیحات مدل اطلاعات مکان داخلی چند بعدی
مدل اطلاعات موقعیت مکانی چند بعدی داخلی اساس ناوبری داخلی و خدمات مبتنی بر مکان و پایه و اساس بیان نقشه داخلی است. اجزای اطلاعات مکان را تعریف می کند و یک مدل مکان چند بعدی را بر اساس فضا و رویداد توصیف می کند. این تعاریف مربوطه را پوشش می دهد و از برنامه های کاربردی مبتنی بر مکان داخلی پشتیبانی می کند.
2.1. واژه شناسی
اصطلاحات و تعاریف مورد استفاده در استاندارد در جدول 1 آمده است .
2.2. مدل اطلاعات مکان داخلی با استفاده از نمودار UML
مدل اطلاعات مکان داخلی در استاندارد IndoorLocationGML در شکل 1 با استفاده از نمودار کلاس UML نشان داده شده است.
این مدل از قراردادهای طرحواره UML GML 3.2.1 پیروی می کند و بسیاری از انواع به طور مستقیم یا غیر مستقیم از انواع GML به ارث رسیده اند.
AbstractIndoorLocation به عنوان یک کلاس انتزاعی در این مدل تعریف شده است. دو کلاس، مکان مطلق داخلی و مکان نسبی داخلی، زیر کلاس های این کلاس انتزاعی هستند. کلاس AbstractIndoorLocation دارای سه ویژگی اساسی است:
-
life: نشان دهنده به موقع بودن مکان های داخلی است.
-
trs: مشخصه زمانی مکان های داخلی را نشان می دهد.
-
crs: نشان دهنده سیستم مرجع مختصات محلی مکان های داخلی است. سیستم مرجع مختصات مورد استفاده در اندازه گیری مکان هندسی داخلی باید سیستم مختصات دکارتی سه بعدی باشد.
IndoorAbsoluteLocation تخصصی AbstractIndoorLocation است که نشان دهنده یک مکان داخلی است که غیرقابل تغییر است. با یک مختصات هندسی در سیستم مرجع مختصات داده شده توصیف می شود.
IndoorRelativeLocation یکی دیگر از تخصص های AbstractIndoorLocation است. برای توصیف یک مکان نسبی، حداقل یک مکان مرجع باید مشخص شود. برای تعیین مکان مرجع می توان از مکان مطلق موجود استفاده کرد. تشکیل شده است از:
-
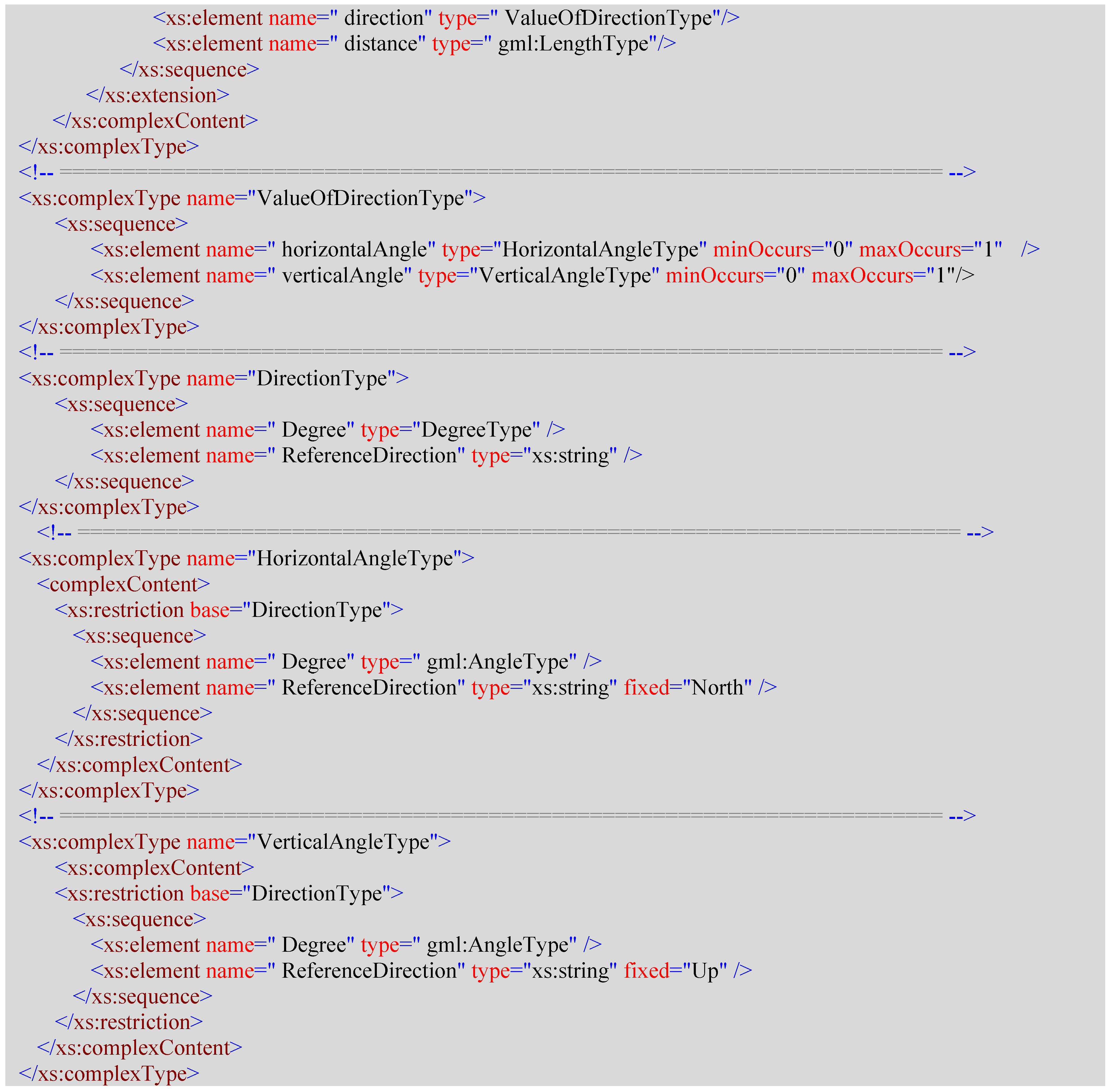
موقعیت هندسی نسبی: با مقادیر فاصله و جهت (زوایای افقی و عمودی) نسبت به یک شی مرجع توصیف می شود.
-
مکان معنایی نسبی: توصیف شده توسط معنایی مانند توصیف جهت (به عنوان مثال، بالا، پایین، چپ، راست، جلو، عقب)، توصیف فاصله (شامل مقدار عددی فاصله و یک توصیف معنایی مانند: “دو متر فاصله از مرجع شی”)، شرح ترتیب (قبلی و بعدی)، و توصیف توپولوژی (شامل، مجاورت و اتصال) نسبت به یک یا چند شیء مرجع.
2.3. زبان نشانه گذاری اطلاعات مکان داخلی با استفاده از GML
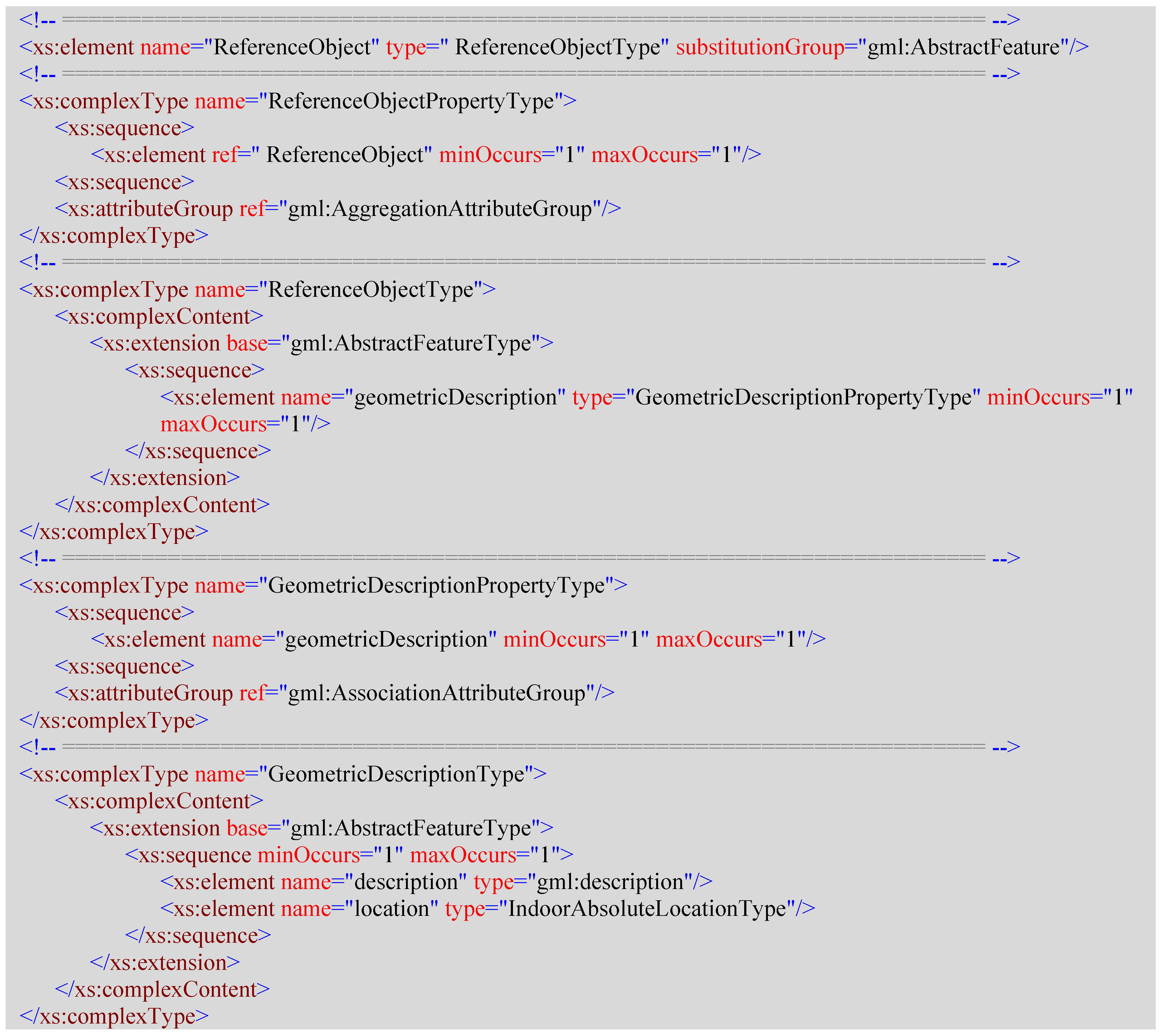
طرح XML برای مدل داده اطلاعات مکان داخلی به عنوان یک طرح کاربردی از GML تعریف شده است. قوانین تعریف شده در GML3.2.1 هنگام نگاشت از طرحواره UML به طرحواره XML مطابقت دارند.
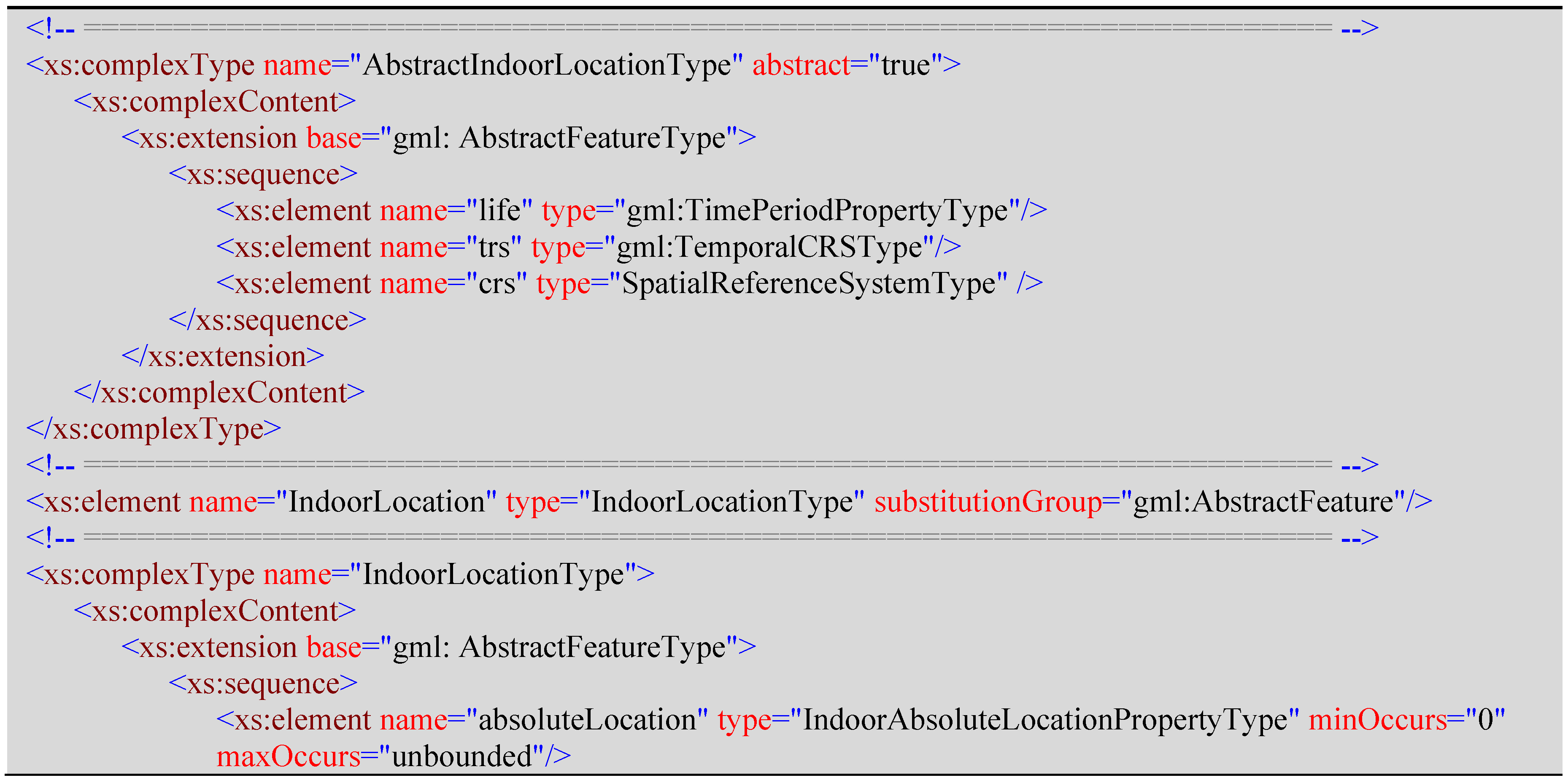
2.3.1. IndoorLocation
<AbstractIndoorLocationType> یک کلاس انتزاعی است که از gml:AbstractFeatureType به ارث رسیده است. به عنوان کلاس پایه برای کلاس هایی که مکان های داخلی را نشان می دهند عمل می کند. مدل محتوای آن شامل سه ویژگی عنصر برای اتصال یک سیستم مرجع زمانی و یک سیستم مرجع مکانی و تعیین چرخه زندگی به یک شی مکان داخلی است. <IndoorLocation> یک عنصر ریشه از IndoorLocationGML است. با IndoorAbsoluteLocation و IndoorRelativeLocation جمع می شود.

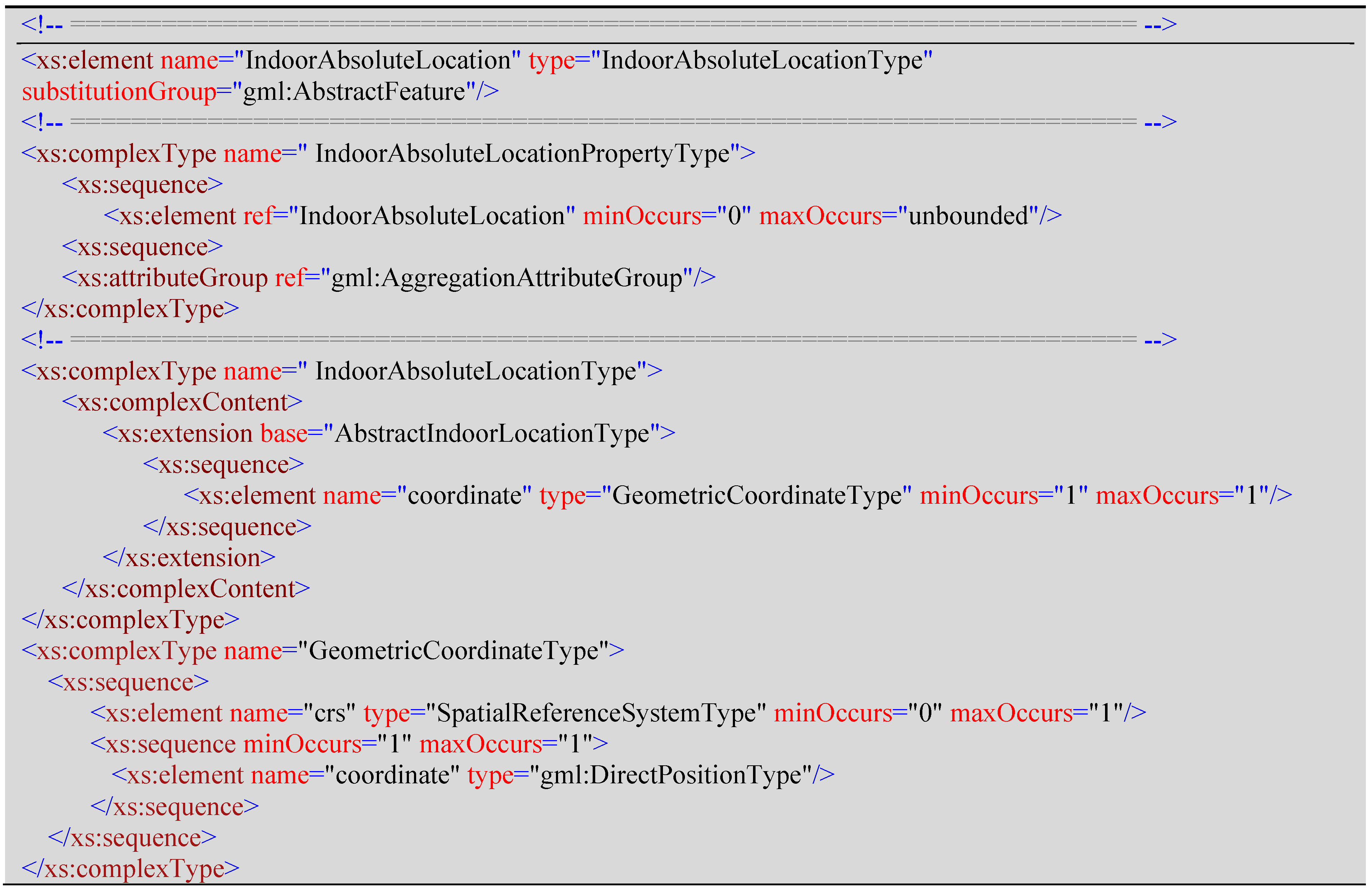
2.3.2. Indoor AbsoluteLocation
<IndoorAbsoluteLocation> عنصری است که یک مکان مطلق در فضای داخلی (فضای محصور) را نشان می دهد و از کلاس <AbstractIndoorLocation> مشتق شده است. این شامل یک “مختصات” است که از نوع GeometricalCoordinateType است. GeometricalCoordinateType حاوی یک عنصر مختصات است که از نوع gml:DirectPositionType است. gml:DirectPositionType دارای دو مخفف srsName و srsDimension است. اولی اختیاری است و می تواند برای ارجاع به یک سیستم مرجع مختصات موجود استفاده شود، و دومی می تواند برای مشخص کردن ابعاد یک نقطه استفاده شود.
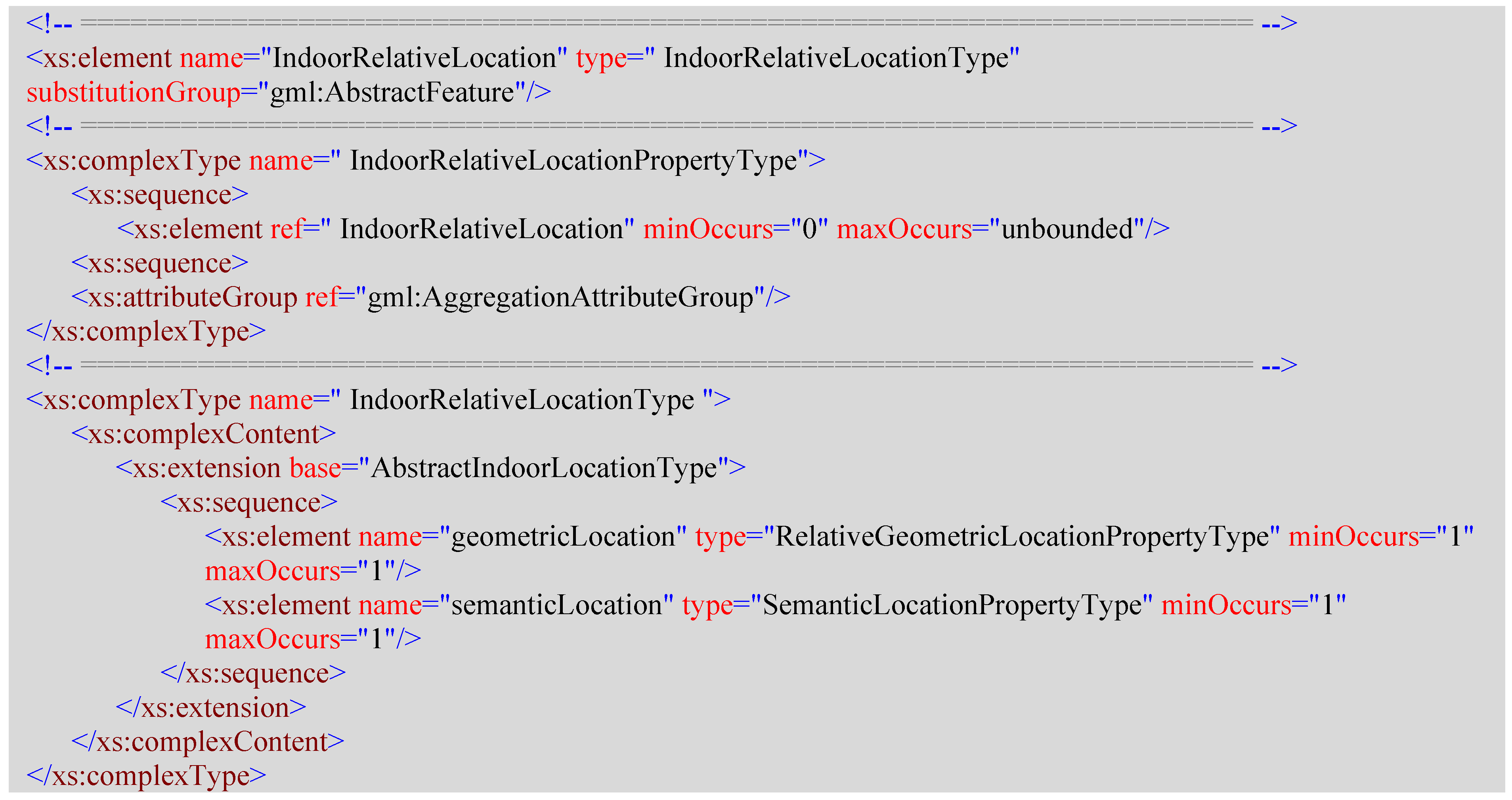
2.3.3. IndoorRelativeLocation
<IndoorRelativeLocation> عنصری است که مکانی را در فضای داخلی نسبت به یک شی مرجع مشخص نشان می دهد. مدل محتوای آن شامل دو ویژگی است که موقعیت نسبی را از منظر هندسی و معنایی توصیف می کند.
2.3.4. RelativeGeometricalLocation
<RelativeGeometricalLocation> عنصری است که برای نشان دادن بخش هندسی یک مکان نسبی استفاده می شود. این مجموعهای از فهرستی از توصیفهای موقعیت هندسی است که هر کدام با فاصله و زاویه افقی و عمودی نسبت به یک شی مرجع توصیف میشوند.
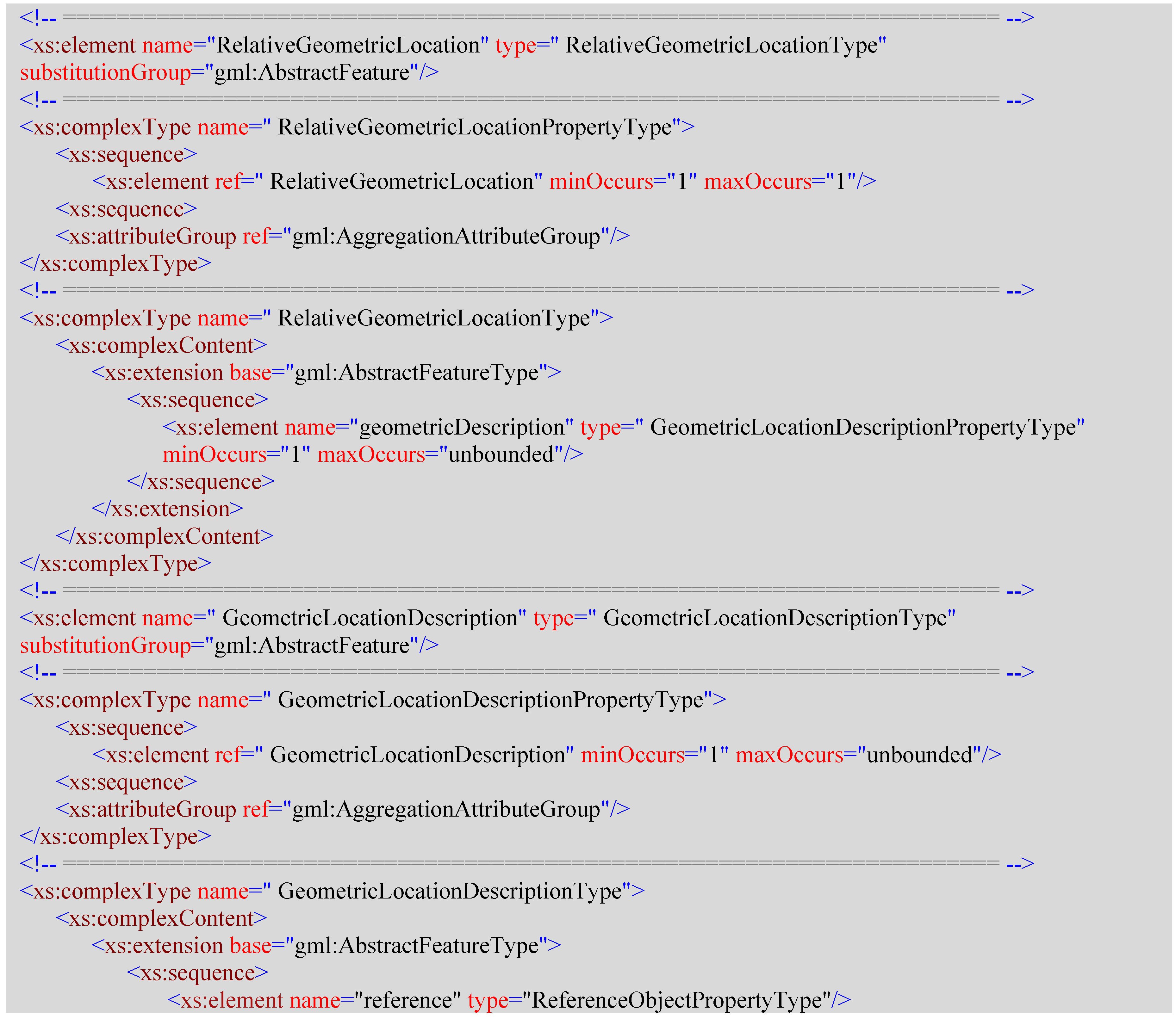
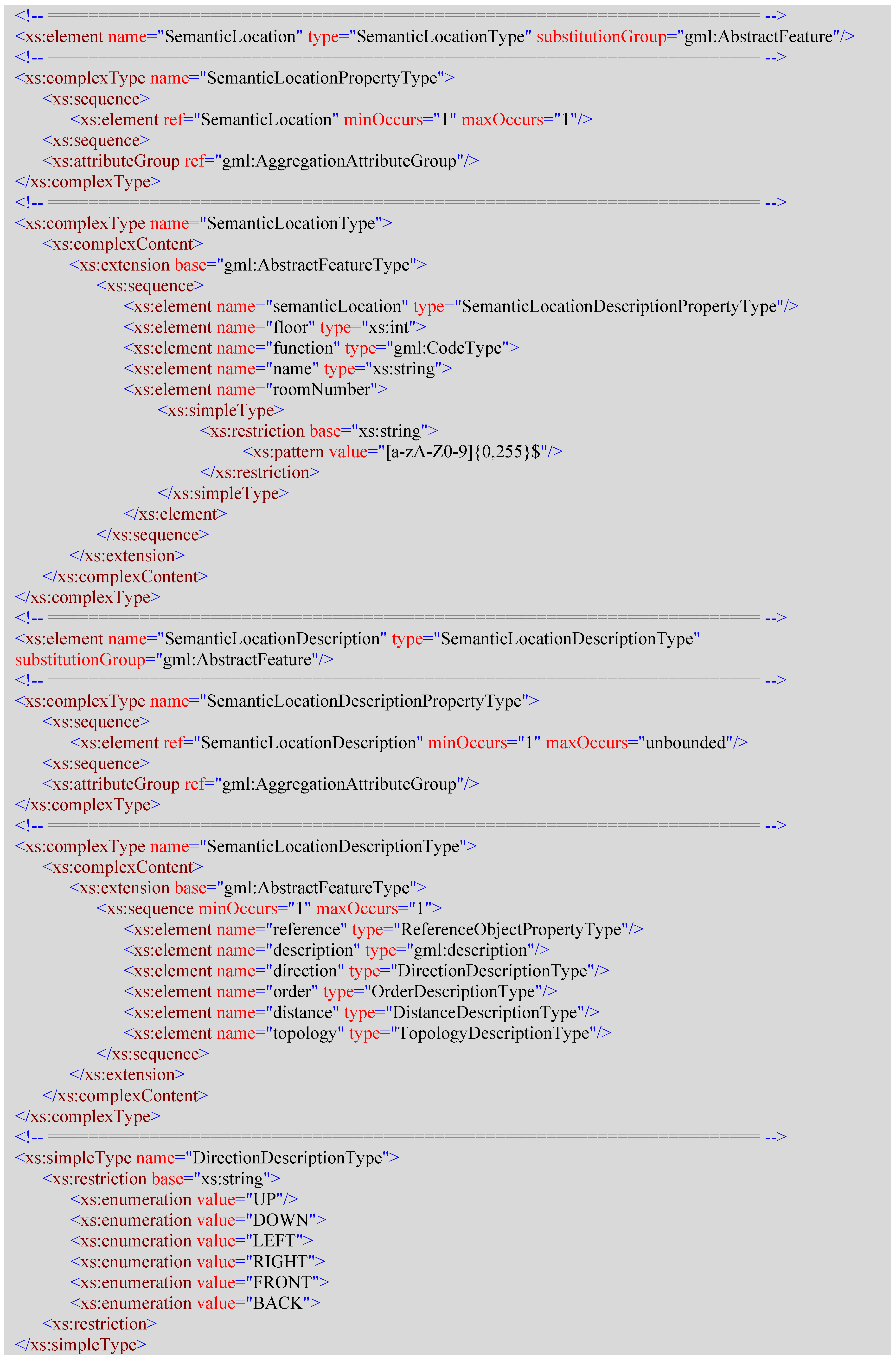
2.3.5. SemanticLocation
<SemanticLocation> عنصری است که برای نشان دادن بخش معنایی یک مکان نسبی استفاده می شود. آن شامل:
-
ویژگی floor یک عدد xs:int است که نمایانگر طبقه ای است که شی مکان در آن قرار دارد.
-
ویژگی function برای توصیف عملکرد شی مکان استفاده می شود و به عنوان نوع gml:CodeType تعریف می شود.
-
ویژگی name یک رشته xs: نشان دهنده نام یک مکان داخلی است.
-
RoomNumber یک رشته xs: است که به رشته ای از ترکیب ارقام و حروف محدود می شود.
-
SemanticDescription از نوع SemanticLocationDescription است. از چندین معناشناسی برای توصیف یک مکان نسبت به یک شی مرجع تشکیل شده است که عبارتند از:
-
directionDescription که از نوع DirectionDescriptionType است و فهرستی از مقادیر شمارش رشته ها برای توصیف جهت نسبت به مرجع مانند UP، DOWN، LEFT، RIGHT، FRONT و BACK است.
-
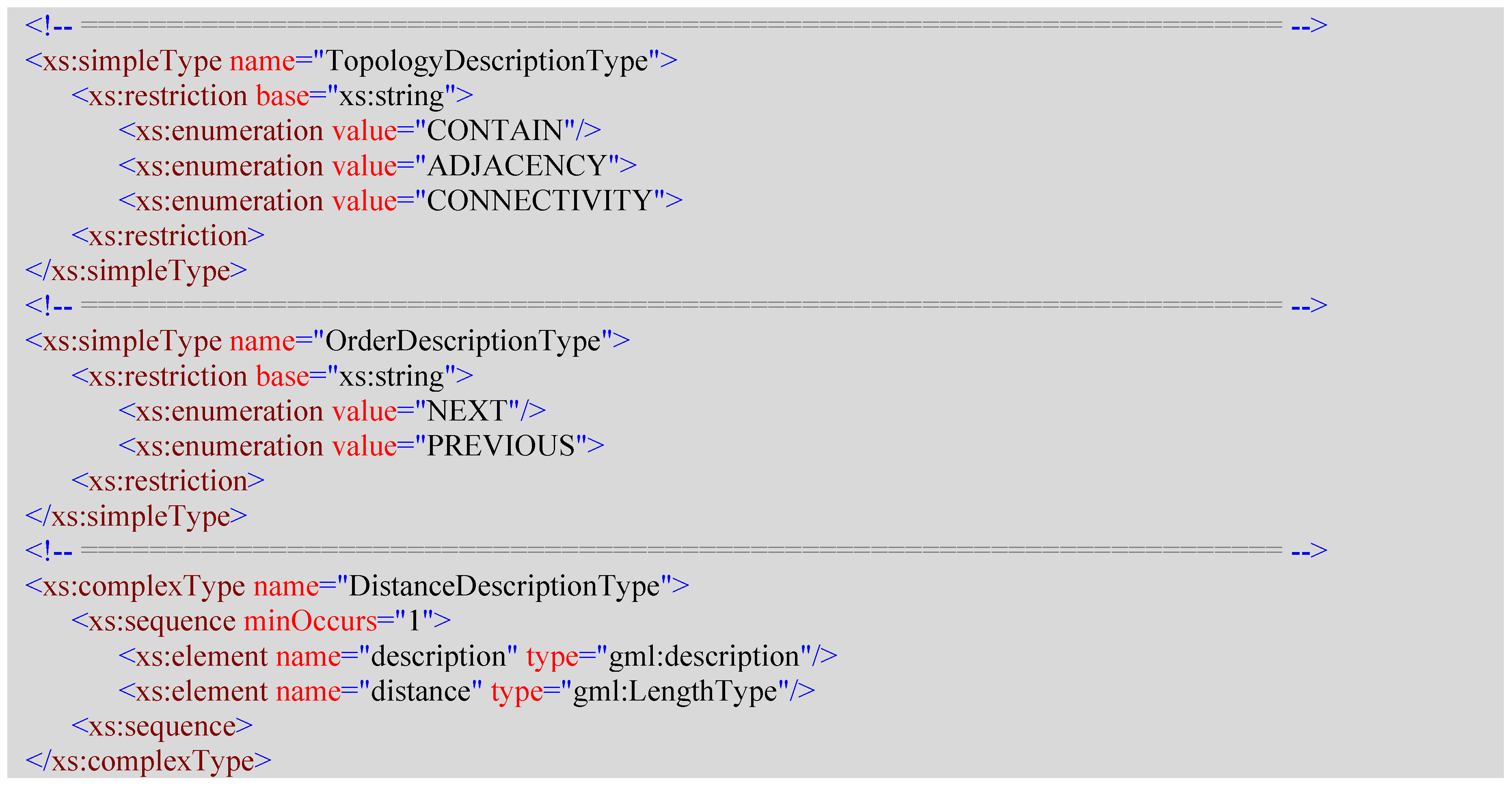
distanceDescription با یک نوع gml:description و gml:LengthType توصیف میشود. اولی به صورت معنایی توصیف شده است و دومی یک مقدار xs:double با gml:uom متصل است.
-
orderDescription از NEXT و PREVIOUS برای توصیف مکان نسبی متوالی به شی مرجع استفاده می کند.
-
topologyDescription از CONTAIN، ADJACENCY و CONNECTIVITY برای توصیف روابط توپولوژی یک مکان با شی مرجع استفاده می کند.
-
2.3.6. ReferenceObject
<ReferenceObject> عنصری است که به عنوان مرجع برای توصیف یک مکان نسبی در فضای داخلی استفاده می شود. مدل محتوای آن حاوی ویژگی عنصر geometricalDescription برای توصیف مکان هندسی مطلق شی مرجع است.
3. از موارد IndoorLocationGML استفاده کنید
در زمینه کاربردهای داخلی، ممکن است در مورد مکان یک فضای سلولی، یک شخص یا ربات، یک شی (تاسیسات، نمایشگاه و غیره) یا محل گره های یک مسیر ناوبری نگران باشیم. برخی از این مکان ها ثابت هستند در حالی که برخی دیگر پویا هستند. مکان های داخلی ممکن است به مکان ناظران و اشیاء مرجع تقسیم شوند. از این رو، یک ماتریس را می توان از این روش طبقه بندی به دست آورد ( شکل 2 ).
از این دیدگاه، موارد استفاده زیر را می توان نتیجه گرفت ( جدول 2 ):
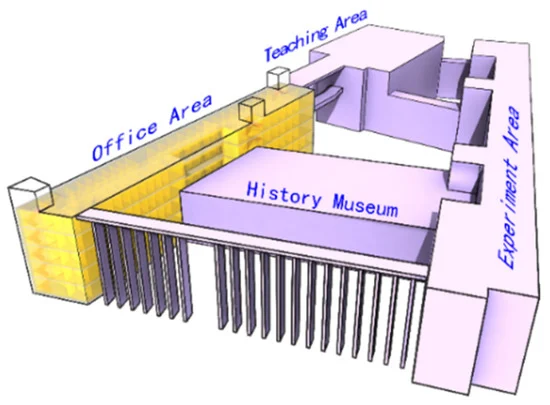
برای نشان دادن استاندارد، ما از مدلی از ساختمان آموزشی چهارم در پردیس Xipu دانشگاه جیائوتنگ جنوب غربی استفاده می کنیم ( شکل 3 )، و موارد استفاده معمولی در بخش های زیر آورده شده است.
3.1. از Case of Indoor Location Maps استفاده کنید
نقشههای مکان داخلی معمولاً با شبکههایی متشکل از گرهها و لبهها نشان داده میشوند که معمولاً حاوی چندین لایه از فضای داخلی هستند ( شکل 4 ).
یک گره معمولاً یک عنصر سلولی از فضای داخلی (به عنوان مثال، اتاق ها، راهروها، درها، و غیره) را نشان می دهد، و یک لبه نشان دهنده رابطه توپولوژی بین دو گره، مانند اتصال و مجاورت است. علاوه بر شبکه سلولی پایه فضای داخلی، اطلاعات بیشتری را می توان با IndoorLocationGML ارائه کرد، مانند فاصله، رابطه جهت و رابطه ترتیب بین دو گره. معنایی مانند طبقه، تابع و نام گره ها را می توان در این چارچوب ادغام کرد تا یک نقشه موقعیت مکانی داخلی غنی از معنایی ایجاد کند.
گره ها عناصر ثابت و غیرقابل تغییر چارچوب نقشه مکان داخلی هستند، بنابراین IndoorAbsoluteLocation برای نمایش ویژگی های هندسی گره ها مناسب است. ویژگی gml:id IndoorAbsoluteLocation که از gml:AbstractFeature به ارث رسیده است، می تواند برای تضمین اینکه هر گره دارای یک شناسه منحصر به فرد است، در صورت ارجاع بعدی، مشخص شود. بنابراین یک گره را می توان با سند XML زیر توصیف کرد.
< IndoorAbsoluteLocation gml:id="0010"> <life gml:id="TP01"> <gml:TimePeriod> <gml:begin> <gml:TimeInstant gml:id="TI01"> <gml:timePosition>06-04-2005</gml:timePosition> </gml:TimeInstant> </gml:begin> <gml:end> <gml:TimeInstant gml:id="TI02"> <gml:timePosition>06-04-2035</gml:timePosition> </gml:TimeInstant> </gml:end> </gml:TimePeriod> </life> <coordinate srsName="#mycrs" srsDimension="3"> <gml:pos>12.5 6.4 22.0</gml:pos> </coordinate> </IndoorAbsoluteLocation> |
یک گره با یک مختصات در یک سیستم مرجع مختصات معین نشان داده می شود. “#mycrs” در اینجا شناسه منحصر به فرد یک سیستم مرجع مختصات است که در فرهنگ لغت CRS یا هر جای دیگر تعریف شده است. گره همچنین حاوی اطلاعاتی است که مدت زمان آن را از یک موقعیت زمانی توصیف می کند.
لبه های بین دو گره حاوی اطلاعاتی است که روابط نسبی آنها را توصیف می کند و بنابراین می توان با IndoorRelativeLocation نشان داد. فرض کنید دو گره داریم که شناسه آنها “0010” و “0011” است. گره “0011” به عنوان مرجع انتخاب می شود و IndoorRelativeLocation گره “0010” را می توان به صورت زیر توصیف کرد.
<IndoorRelativeLocation gml:id="0010-0011"> <geometricLocation> <geometricDescription> <reference xlinks:href="#0011"/> <جهت> <horizontalAngle> <درجه>270</درجه> <ReferenceDirection>شمال</ReferenceDirection> </horizontalAngle> <verticalAngle> <Degree>0</Degree> <ReferenceDirection>بالا</ReferenceDirection> </verticalAngle> </direction> <فاصله >5</distance> </geometricDescription> </geometricLocation> <semanticLocation> <semanticDescription> <reference xlinks:href="#0011"/> <description >گره 0011 گره درب اتاق 4520 است</description> <direction>FRONT</direction> <order>بعدی</order> <فاصله> <description>از مرکز اتاق 4520 تا در پشتی 6 متر فاصله است</description> <distance>6</distance> </فاصله> </semanticDescription> <floor>5</floor> <function>اتاق جلسه</function> <name>RoomNode0010</name> <roomNumber>4520</roomNumber> </semanticLocation> </IndoorAbsoluteLocation> |
سپس کل نقشه مکان داخلی را می توان با گره ها و روابط احتمالی بین گره ها نشان داد.
3.2. از Case of Indoor Navigation برای انسان ها و روبات ها استفاده کنید
ناوبری داخل ساختمان برای انسان ها و ربات ها ممکن است با اشیایی که به آنها علاقه دارند متفاوت باشد. در موقعیت یک مرکز خرید بزرگ، انسان ممکن است نگران مغازه ها، نرده ها، آسانسورها و غیره باشد و ربات ها ممکن است نگران موانع (اشیاء غیرقابل کشتیرانی) باشند. درها، حسگرها (AP، RFID)، و غیره. در شرایط اضطراری، اشیایی که انسان ها یا روبات ها با آنها درگیر هستند ممکن است با مواردی که در موقعیت های عادی قرار دارند متفاوت باشد، به عنوان مثال، محل نردبان های فرار، خاموش کننده ها، نقاط آتش نشانی، تمایل به آتش سوزی. روباتها ممکن است نگران مکان انسانها و تلاش برای نجات آنها باشند. انسانها راحتتر از رباتها میتوانند محیط را درک کنند، بنابراین، نقشههای موقعیت مکانی داخلی و مسیرهای ناوبری مختلف باید برای انسانها و روباتها ارائه شود.
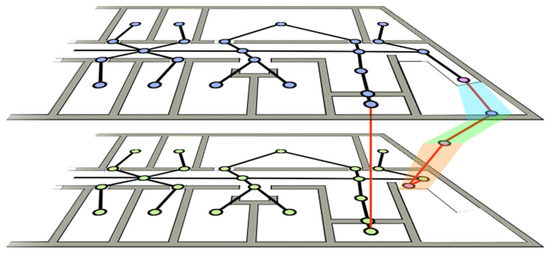
یک مسیر ناوبری از نقشه مکان داخلی با محاسبه بهترین مسیر از نقطه شروع تا مقصد استخراج می شود. از گره ها و لبه های جهت دار تشکیل شده است و نشان دادن آن شبیه به نمایش نقشه های مکان داخلی است. اشیاء مرجع اضافی را می توان به عنوان نشانه در مسیر قرار داد. به عنوان مثال، ناوبری برای انسان ها می تواند اتاق هایی را که به راحتی قابل تشخیص هستند به عنوان اشیاء مرجع در گوشه ای از مسیر اضافه کند تا به مردم کمک کند گره مسیر را به راحتی تشخیص دهند. اطلاعات مربوط به مکان موانع و حسگرها (AP، RFID) بیشتر مربوط به روبات ها است و آنها را قادر می سازد تا محیط را بهتر درک کنند ( شکل 5 را ببینید ).
یک مسیر ناوبری برای انسان در لیست کد زیر نشان داده شده است. مسیر ناوبری برای ربات ها مشابه مسیر ناوبری برای انسان است، با این تفاوت که گره های بیشتری در مسیر وجود دارد و مراجع مختلفی مانند AP و RFID انتخاب می شوند.
<IndoorLocation gml:id="IndoorPath-Human"> <!--گره های مسیر با IndoorAbsoluteLocation--> توصیف می شوند <IndoorAbsoluteLocation gml:id="HP01" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>7.22 115.13 17.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id=" HP02" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>7.22 107.11 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id=" HP03" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>8.22 107.11 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id=" HP03" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>8.22 8.12 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id=" HP03" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>11.00 8.12 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <!-- مکان نسبی داخلی HP03 نسبت به اتاق 4548--> <IndoorRelativeLocation gml:id="HP03-4548"> <geometricLocation> <geometricDescription> <reference xlinks:href="#F5-4548"/> <جهت> <horizontalAngle> <درجه>120</درجه> <ReferenceDirection>شمال</ReferenceDirection> </horizontalAngle> <verticalAngle> <Degree>0</Degree> <ReferenceDirection>بالا</ReferenceDirection> </verticalAngle> </direction> <فاصله >5</distance> </geometricDescription> </geometricLocation> <semanticLocation> <semanticDescription> <reference xlinks:href="#F5-4548"/> <description >Node F5-4548 یک دفتر در طبقه پنجم منطقه اداری است</description> <direction>چپ</direction> <order>قبلی</order> <فاصله> <description>از گره HP03 تا اتاق 4548 5 متر فاصله است</description> <distance>5</distance> </فاصله> </semanticDescription> <floor>5</floor> <function>گره مسیر</function> <name>HP03</name> <roomNumber>0000</roomNumber> </semanticLocation> </IndoorRelativeLocation> ... سایر مکان های نسبی </IndoorLocation> |
مکان انسان ها یا ربات ها به طور مداوم در فرآیند ناوبری تغییر می کند و بنابراین پویا است. مکان اجسام متحرک باید در یک فرکانس ثابت به روز شود، که می تواند با یک توالی مکان نشان داده شود که در آن هر مکان با یک نمونه زمانی مطابقت دارد. مکان داخلی همانطور که در IndoorLocationGML تعریف شده است دارای یک ویژگی حیاتی است که با gml:TimePeriod نشان داده شده است، بنابراین برای توصیف توالی مکان پویا با مشخص کردن نقاط زمانی شروع و پایان هر مکان مناسب است.
3.3. استفاده از Case of Indoor Object Management
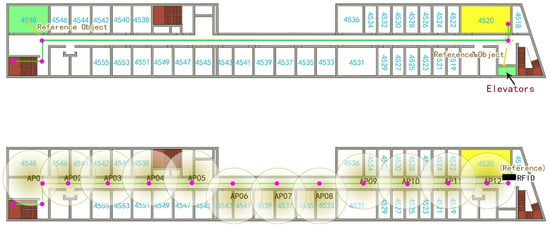
اطلاعات مکان یک عامل کلیدی در مدیریت اشیاء داخلی است. اشیاء داخلی به امکانات داخلی در یک ساختمان، کتابهای موجود در کتابخانه، نمایشگاههای موزه و غیره اشاره دارد. تأسیسات، اشیایی هستند مانند خاموشکنندهها، کنترلکنندههای مدار و آشکارسازهای دود (نگاه کنید به شکل 6)، که بخش مهمی از تاسیسات داخلی در در شرایط عادی و اضطراری ردیابی دقیق مکان یک تاسیسات داخلی در هر زمان در فرآیند بهره برداری از یک ساختمان مهم است.
برای نشان دادن مثال بالا، یک لیست کد به صورت زیر ارائه شده است:
<IndoorLocation gml:id="Facilities"> <!—مکان امکانات داخلی با IndoorAbsoluteLocation--> توضیح داده شده است <!-کولر--> <IndoorAbsoluteLocation gml:id="AC01" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>14.00 13.12 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> … <!—خاموشگر--> <IndoorAbsoluteLocation gml:id=" EX01" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>8.00 17.00 19.50</gml:pos> </coordinate> </IndoorAbsoluteLocation> … <!-- مکان نسبی داخلی AC01 نسبت به اتاق 4520--> <IndoorRelativeLocation gml:id="AC01-4520"> <geometricLocation> <geometricDescription> <reference xlinks:href="#F5-4520"/> <جهت> <horizontalAngle> <درجه>120</درجه> <ReferenceDirection>شمال</ReferenceDirection> </horizontalAngle> <verticalAngle> <Degree>0</Degree> <ReferenceDirection>بالا</ReferenceDirection> </verticalAngle> </direction> <فاصله >3</distance> </geometricDescription> </geometricLocation> <semanticLocation> <semanticDescription> <reference xlinks:href="#F5-4520"/> <description >AC01 در اتاق 4520 است و نزدیک پنجره پشتی اتاق 4520 قرار دارد</description> <direction>چپ</direction> <order>بعدی</order> <فاصله> <description>از AC01 تا مرکز اتاق 4520 3 متر فاصله است</description> <distance>3</distance> </فاصله> <topology>CONTAIN<topology> </semanticDescription> <floor>5</floor> <function>تهویه مطبوع</function> <name>AC01</name> <roomNumber>4520</roomNumber> </semanticLocation> </IndoorRelativeLocation> ... سایر مکان های نسبی </IndoorLocation> |
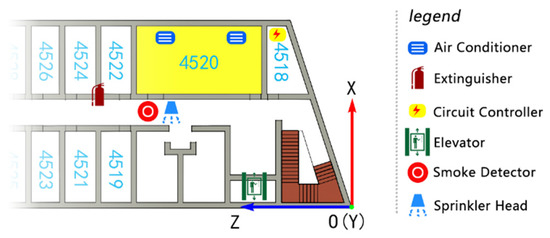
همانطور که در شکل 7 نشان داده شده است، کتابخانه، طبقات، قفسه ها و کتاب ها را می توان به صورت توپولوژیکی مرتب کرد . مکان دقیق داخلی (مکانی یا زمانی) کتاب ها را می توان با استفاده از IndoorLocationGML توصیف کرد.
4. مثال ناوبری بدون درز داخلی-خارج
IndoorLocationGML و IndoorGML یا هر استاندارد دیگری که با استفاده از انواع پایه تعریف می شود از ساختارهای سلسله مراتبی وراثتی GML پیروی می کند و به عنوان طرح کاربردی GML شناخته می شود. GML چارچوبی از اطلاعات جغرافیایی را با ارائه انواع پایه، اصول تعریف کلاس و وراثت، و توصیف روابط بین کلاس ها تعریف می کند. بنابراین، طرحواره های مختلف برنامه GML به راحتی ادغام می شوند. عناصر موجود در اسناد XML مختلف می توانند دارای ویژگی gml:id باشند و سپس می توانند به عنوان اشیاء خارجی که توسط xlink:href تسهیل می شوند، ارجاع داده شوند.
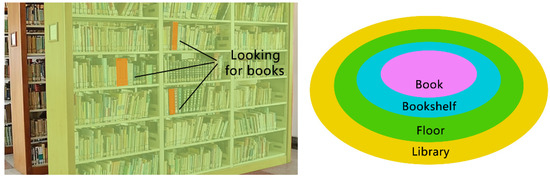
IndoorLocationGML خود برای توصیف اطلاعات مکان چند بعدی داخلی استفاده می شود. پیمایش از فضای باز به داخل به ترکیبی از مسیرهای بیرونی و داخلی نیاز دارد. هر فضای داخلی حداقل دارای یک ورودی است که آن را به فضای بیرونی متصل می کند. در IndoorGML، یک ورودی با یک گره لنگر نشان داده می شود که برای اتصال و نمایش رابطه توپولوژی بین فضاهای بیرونی و داخلی استفاده می شود. یک گره لنگر همچنین میتواند شامل پارامترهایی برای هماهنگسازی تبدیلها باشد، که امکان تبدیل مکان بدون درز از فضای باز به داخل را فراهم میکند ( شکل 8 را ببینید ).
سند IndoorGML، مجموعه داده شبکه حمل و نقل زمینی در فضای باز، و سند IndoorLocationGML را می توان برای ارائه LBS یکپارچه داخلی و خارجی ترکیب کرد. گره لنگر باید هم در سند IndoorGML و هم در مجموعه داده های خارجی تعریف شود تا فضای داخلی به فضای باز متصل شود. اگرچه IndoorGML از شبکههای چندلایه داخلی برای ناوبری داخلی پشتیبانی میکند، IndoorLocationGML میتواند اطلاعات موقعیت مکانی چندبعدی داخلی دقیقتر و معنایی غنی را به عنوان مکمل IndoorGML ارائه دهد و اطلاعات مکان را برای LBS داخلی اعمال کند. همانطور که در بخش 3.2 بحث شد ، مکان یابی پویا و ناوبری را می توان با استفاده از IndoorLocationGML به دست آورد.
مسیر ناوبری از یک بخش بیرونی و یک بخش داخلی تشکیل شده است. ناوبری در فضای باز معمولاً توسط شبکه های جاده ای تسهیل می شود که از بخش های جاده تشکیل شده است. یک بخش جاده را می توان با لیستی از گره ها نشان داد و هر گره دارای یک شناسه منحصر به فرد و یک جفت (طول جغرافیایی، عرض جغرافیایی) یا سه (طول، عرض جغرافیایی، ارتفاع) از مختصات است. بخش داخلی در عوض با لیستی از مختصات سه بعدی در یک سیستم مختصات دکارتی نشان داده می شود. نمونه ای از پیمایش از نقطه شروع به مقصد (اتاق 4520) در زیر آورده شده است ( شکل 9)). در این مثال، ما سه قطعه کد GML ایجاد می کنیم: قسمت اول با GML توضیح داده شده است و بخش بیرونی مسیر را نشان می دهد. دوم بخش داخلی مسیر است که با IndoorLocationGML توضیح داده شده است. مجموعه ای از گره ها با IndoorAbsoluteLocation نشان داده می شوند و مکان نسبی نیز برای نمایش این استاندارد ارائه شده است. قسمت سوم با IndoorGML توضیح داده شده است و از یک گره لنگر برای اتصال بخش داخلی و خارجی مسیر استفاده می شود.
<!-- مجموعه داده های شبکه حمل و نقل در فضای باز، نام فایل: OutdoorExp.xml--> <gml:Point srsName="#geodeticCRS" id="NodeListofOutdoor" axisLabels="lat long alt" uomLabels="deg deg m"> <gml:pos id="Start-point">30.766376990623694 103.9879810720322 524</gml:pos> <gml:pos id="Outdoor-P2">30.766458439227996 103.9882126539487 524</gml:pos> <gml:pos id="Outdoor-P3">30.766341659288557 103.9882716625471 524</gml:pos> <gml:pos id="Outdoor-Entrance">30.766320156242887 103.9882323145866 524</gml:pos> </gml:Point> <!-- مجموعه داده IndoorLocationGML، نام فایل: IndoorLocationExp.xml--> <IndoorLocation gml:id="IndoorPath"> <!--گره های مسیر با IndoorAbsoluteLocation--> توصیف می شوند <IndoorAbsoluteLocation gml:id="F1-Entrance" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>7.22 115.13 0.74</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id="F1-P2" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>7.22 107.11 0.74</gml:pos> </coordinate> </IndoorAbsoluteLocation> ... گره های F1-P3, F1-P4, F1-P5, F2-P6, F2-P7, F2-P8, F2-P9, F3-P10، F3-P11، F3-P12، F3-P13، F4-P14، F4-P15، F4-P16، F4-P17، F5-P18، F5-C-P19، F5-C-P20، F5-C-P21 در اینجا حذف شده اند <IndoorAbsoluteLocation gml:id="F5-C-P22" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>7.22 8.12 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <IndoorAbsoluteLocation gml:id="F5-Room5420" crs="#indoorCRS"> <coordinate srsDimension="3"> <gml:pos>11.00 8.12 19.00</gml:pos> </coordinate> </IndoorAbsoluteLocation> <!-- مکان نسبی داخلی F5-C-P20 نسبت به سرویس بهداشتی1--> <IndoorRelativeLocation gml:id="F5-C-P20-F5-Restroom1"> <geometricLocation> <geometricDescription> <reference xlinks:href="#F5-Restroom1"/> <جهت> <horizontalAngle> <درجه>300</درجه> <ReferenceDirection>شمال</ReferenceDirection> </horizontalAngle> <verticalAngle> <Degree>0</Degree> <ReferenceDirection>بالا</ReferenceDirection> </verticalAngle> </direction> <فاصله >5</distance> </geometricDescription> </geometricLocation> <semanticLocation> <semanticDescription> <reference xlinks:href="#F5-Restroom1"/> <description >Node F5-Restroom1 یک سرویس بهداشتی در طبقه 5 منطقه اداری است</description> <direction>راست</direction> <order>بعدی</order> <فاصله> <description>5 متر از گره F5-C-P20 تا سرویس بهداشتی1 وجود دارد</description> <distance>5</distance> </فاصله> </semanticDescription> <floor>5</floor> <function>گره مسیر</function> <name>F5-C-P20</name> <roomNumber>0000</roomNumber> </semanticLocation> </IndoorRelativeLocation> ... سایر مکان های نسبی </IndoorLocation> <!-- مجموعه داده IndoorGML، نام فایل: IndoorGMLExp.xml--> <AnchorSpace> <externalReference> <externalObject> <name>ورودی در فضای باز</name> </externalObject> <externalObject> <name>F1-Entrance</name> </externalObject> </externalReference> </AnchorSpace> |
5. نکات پایانی
توسعه سریع سیستمهای ناوبری و موقعیتیابی چینی به این معنی است که استاندارد کردن ناوبری بدون درز داخلی و خارجی و اطلاعات جغرافیایی LBS ضروری است. CityGML بر نمایش هندسه، معناشناسی و ظاهر اشیاء مرتبط با شهری مانند ساختمانها، قطعات ساختمان، تاسیسات، پلها، تونلها و غیره تمرکز دارد. جایی که اشیاء را می توان قرار داد و پیمایش کرد و همچنین به روابط (مثلاً توپولوژی) بین فضاها مربوط می شود. نمایش شبکه های چند لایه فضای سلولی هدف اصلی استاندارد IndoorGML است. با این حال، هیچ استاندارد جهانی برای اطلاعات مکان داخلی در حال حاضر وجود ندارد،
استاندارد IndoorLocationGML پیشنهادی در این مقاله چارچوبی از توضیحات اطلاعات مکان داخلی همه جا را برای در نظر گرفتن دقیق (موقعیت مطلق داخلی) و ملاحظات تقریبی (موقعیت نسبی داخلی) و روابط آنها ارائه کرده است، بنابراین کامل است. این استاندارد همراه با سایر استانداردهای همراهی که در سالهای اخیر ارائه شدهاند، از جمله استانداردهای رابط برای سرویسهای هممکانی چندوجهی داخلی و خارجی، مشخصات دادههای نقشههای الکترونیکی برای سرویسهای وب، و مدلهای داده و فرمتهای مبادله برای پایگاههای اطلاعاتی فضایی قابل پیمایش، به نیازهای فوری فعلی و پشتیبانی از برنامه های صنعتی را فراهم می کند.
منابع
- زلاتانوا، اس. سیتول، جی. ناکاگاوا، م. Zhu, Q. مشکلات در نقشه برداری و مدل سازی فضای داخلی. طاق ISPRS. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2013 ، 4 ، 51-55. [ Google Scholar ] [ CrossRef ]
- زمستان، S. اطلاعات فضایی داخلی. بین المللی J. 3D Inf. مدل. 2012 ، 3 ، 25-42. [ Google Scholar ] [ CrossRef ]
- لی، جی. لی، ک. زلاتانوا، اس. کلبه، تی. ناگل، سی. Becher، T. OGC IndoorGML. نسخه 1.0. سند OGC شماره 14-005r1; کنسرسیوم فضایی باز: 35 Main Street, Suite 5, Wayland, MA, USA, 2014. [ Google Scholar ]
- Clemens, P. OpenGIS Geography Markup Language (GML) استاندارد رمزگذاری. نسخه 3.2.1. سند OGC شماره 07-036; کنسرسیوم فضایی باز: 35 Main Street, Suite 5, Wayland, MA, USA, 2014. [ Google Scholar ]
- گروگر، جی. Plümer, L. CityGM – مدلهای شهری سه بعدی معنایی قابل تعامل. ISPRS J. Photogramm. Remote Sens. 2012 ، 5 ، 12-33. [ Google Scholar ] [ CrossRef ]
- لی، ن. بورسین، بی. کریشناماچاری، بی. Soibelman، L. یک الگوریتم محلی سازی داخلی با محوریت BIM برای پشتیبانی از عملیات واکنش اضطراری آتش سوزی ساختمان. خودکار ساخت و ساز 2014 ، 3 ، 78-89. [ Google Scholar ] [ CrossRef ]
- تشکوری، ح. رجبی فرد، ع. کلانتری، م. مدل فضایی سه بعدی داخلی/خارجی جدید برای تسهیل پاسخ اضطراری داخلی. ساختن. محیط زیست 2014 ، 3 ، 170-182. [ Google Scholar ] [ CrossRef ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جئوگر. Inf. علمی 2015 ، 5 ، 1737-1756. [ Google Scholar ] [ CrossRef ]
- Salveson-Nossum، A. IndoorTubes یک طرح جدید برای نقشه های داخلی. کارتوگر. Geogr. Inf. علمی 2013 ، 3 ، 192-200. [ Google Scholar ]
- لورنز، ا. تیرباخ، سی. باور، ن. Holbe، جنبه های طراحی نقشه TH، پیچیدگی مسیر، یا پس زمینه اجتماعی؟ عوامل موثر بر رضایت کاربر از نقشه های ناوبری داخلی کارتوگر. Geogr. Inf. علمی 2013 ، 6 ، 201-209. [ Google Scholar ] [ CrossRef ]
- لینک، J.Á.B. اسمیت، پی. ویول، ن. Wehrle، K. ناوبری دقیق بر اساس نقشه در داخل ساختمان در تلفن همراه. J. Locat. سرویس مبتنی بر 2012 ، 7 ، 23-43. [ Google Scholar ] [ CrossRef ]
- بهارگاوا، پ. کریشنامورتی، اس. شریواستاوا، ا. نکشثری، ع. ماه، م. Agrawala، A. Locus: محلی سازی، ردیابی و ناوبری داخلی قوی و بدون کالیبراسیون برای ساختمان های چند طبقه. J. Locat. سرویس مبتنی بر 2015 ، 11 ، 187-208. [ Google Scholar ] [ CrossRef ]
- کوستولیس، آی. Gasteratos، A. نقشه برداری معنایی برای وظایف رباتیک سیار: یک نظرسنجی. ربات. Auton. سیستم 2014 ، 12 ، 86-103. [ Google Scholar ] [ CrossRef ]
- تامیل سلوی، دی. Shalinie, SM; ثسنیم، AF; Sundari، SG انتخاب مسیر بهینه برای ناوبری ربات سیار با استفاده از الگوریتم ژنتیک در یک محیط داخلی. Adv. محاسبه کنید. شبکه امن بین المللی Conf. 2011 ، 12 ، 263-269. [ Google Scholar ]
- زو، س. Xiong، Q. Zhao, J. مدل اطلاعات مکان داخلی و سرویس مکان هوشمند. جی. ژئومات. 2014 ، 10 ، 1-7. [ Google Scholar ]
- Xiong، Q. زو، س. زلاتانوا، اس. هوانگ، ال. ژو، ی. Du، Z. مدل اطلاعات مکان داخلی چند بعدی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2013 ، 12 ، 45-49. [ Google Scholar ] [ CrossRef ]
- سیتول، جی. زلاتانوا، اس. موقعیت، مکان و منطقه: یک چشم انداز داخلی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 4 ، 89-96. [ Google Scholar ] [ CrossRef ]
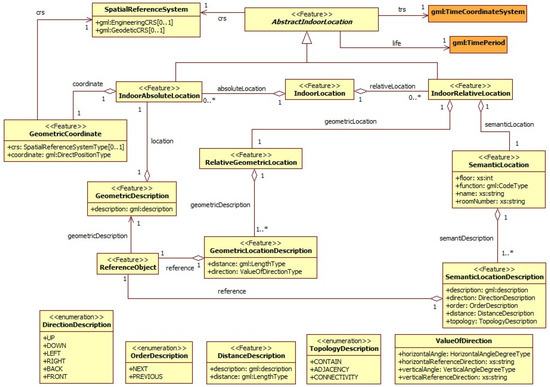
شکل 1. نمودار UML اطلاعات مکان چند بعدی داخلی.
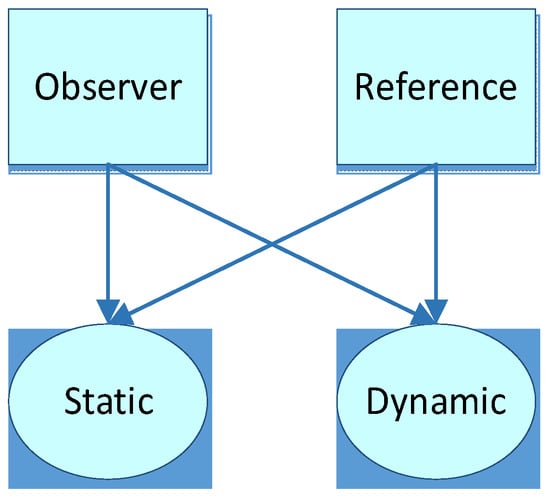
شکل 2. ماتریس طبقه بندی مکان داخلی.
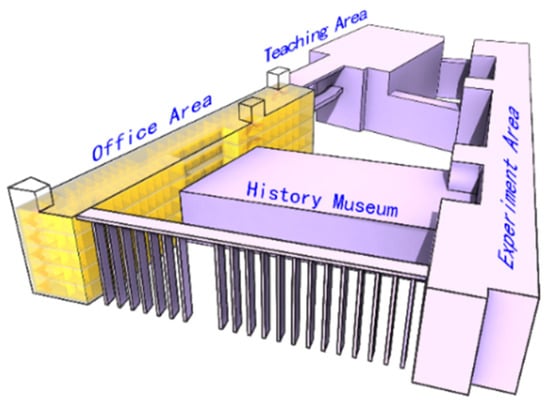
شکل 3. ساختمان آموزشی چهارم در پردیس Xipu در دانشگاه جنوب غربی جیائوتنگ.
شکل 4. نمونه ای از نقشه داخلی.
شکل 5. ناوبری داخلی برای انسان ها ( بالا ) و روبات ها ( پایین ).
شکل 6. مدیریت تاسیسات داخلی.
شکل 7. جستجوی کتاب در کتابخانه.

شکل 8. گره لنگر اتصال شبکه های داخلی و خارجی (شکل 16 سند IndoorGML نسخه 1.0).

شکل 9. نمونه ای از ناوبری بدون درز داخلی-خارج.

جدول 1. اصطلاحات IndoorLocationGML.
جدول 2. موارد استفاده احتمالی اطلاعات مکان داخلی و طبقه بندی آن.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر