

خلاصه
اجسام متحرک ؛ مدل داده ; شبکه ; خط سیر ; اطلاعات معنایی ؛ دوم
1. معرفی
سهم این مقاله در جنبه های زیر نهفته است:
-
یک مدل GSMNet سلسله مراتبی برای اشیاء متحرک در شبکهها پیشنهاد شده است که مسیر حرکت اجسام، شبکههای زیربنایی و اطلاعات معنایی، از جمله روابط اجتماعی و ترافیک را به شیوهای یکپارچه نشان میدهد. ابزار مؤثر و یکپارچه ای برای مدیریت این داده های بدون ساختار فراهم می کند.
-
بر اساس مدل GSMNet، مجموعه بزرگی از انواع داده ها و عملگرهای مربوطه ارائه شده است و ما تعاریف رسمی انواع داده را همراه با امضاهای عملیات و معنایی ارائه می دهیم. هفده پرسش معیار از BerlinMOD با نماد رسمی SQL بازنویسی می شوند.
-
آزمایشهای گسترده با مسیرهای شبیهسازیشده توسط BerlinMOD برای ارزیابی کارایی و عملکرد انجام میشود. نتایج نشان میدهد که مدل GSMNet پیشنهادی ما دارای پتانسیل قوی برای کاهش عملیات زمانبر پیوستن جدول است و قابلیت نمایش اطلاعات معنایی را دارد.
2. کارهای مرتبط
3. مدل GSMNet
3.1. مقدماتی
سه نوع اساسی برای تعاریف زیر وجود دارد:
دو نوع زمان برای نمایش زمان ارائه شده است:
انواع هندسه از OGC استفاده می شود که یک سری مشخصات را در مورد مدل شی هندسی منتشر می کند. GSMNet پیشنهادی شامل سه نوع هندسه اساسی است:
p o i n t—–�����̲یک مکان واحد را در فضای مختصات نشان می دهد و شیء هندسی صفر بعدی را نشان می دهد. دارای یک مقدار عرض جغرافیایی و یک مقدار طول جغرافیایی است. مکان یک جسم متحرک را می توان به عنوان یک نقطه تعریف کرد.
من n e _—����̲منحنی با درون یابی خطی بین است p o i n t s—–������̲. به عنوان مثال، بخش مسیر یا بخش جاده را می توان به عنوان یک نمونه از تعریف کرد من n e _—����̲.
3.2. مدل سازی شبکه ها
3.3. نمایش شی متحرک
یک بخش s e g���نمایش خاصی از بخشی از یک شبکه با ویژگی های زیر است: جاده های عبوری توسط یک تقاطع از هم جدا می شوند و بخش های جاده ای که به دو نیم شده یک تقاطع مشترک ندارند. به طور همزمان، یک بخش نشان دهنده واحد اصلی جداسازی جریان ترافیک است و به صورت زیر تعریف می شود:
جایی که s i d���شناسه بخش است s e g���، g هندسه را توصیف می کند، l نشان دهنده طول است، t yp e����برای نشان دادن دو نوع قطعه به نام های ساده و دوگانه استفاده می شود. t s t a t e������وضعیت ترافیک بخش فعلی و پرچم را نشان می دهد s t a r t�����نشان دهنده نحوه نمایش مکان شبکه است. تعریف نقطه پایانی کوچکتر یا بزرگتر فرض می کند x – y�−�ترتیب نقاط در صفحه دو بعدی به عنوان مثال، یک مکان بخش می تواند به یک نقطه نگاشت شود s l = ( s i d، د)��=(���,�). اگر s t a r t = s m a l l e r�����=�������، نکته s l��در بخش s e g���در فاصله d از نقطه انتهایی کوچکتر قرار دارد. اگر s t a r t = l a r ge r�����=������، نکته s l��در بخش s e g���در فاصله d از نقطه پایانی بزرگتر قرار دارد. این ارتباط نزدیکی با مفهوم ارجاع خطی در حوزه GIS دارد.
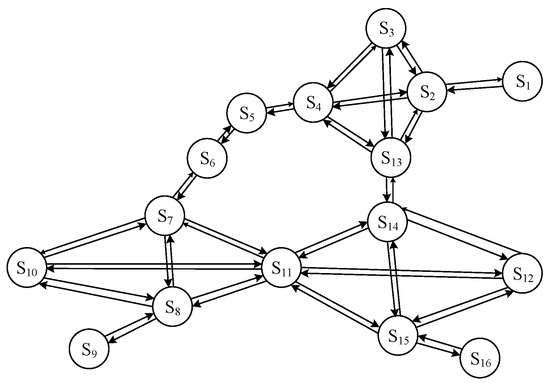
ساختار گراف قطعه جیس��برای نمایش شبکه های زیربنایی به عنوان یک جفت گره استفاده می شود Vس��(بخش ها) و لبه ها Eس��(روابط فضایی) و به صورت زیر تعریف می شود:
روابط فضایی آرس�سبه این صورت تعریف می شوند:
Eس�سمجموعه ای از روابط فضایی بین دو بخش را نشان می دهد:
وضعیت ترافیک t s t a t eتیستیآتیهبرای توصیف وضعیت یک قطعه استفاده می شود و به صورت زیر تعریف می شود:
جایی که s i dسمندشناسه بخش است. تیfr o mتی���مترو تیt oتیتی�به ترتیب زمان شروع و پایان این وضعیت ترافیکی را نشان می دهد. v نشان دهنده سرعت متوسط قطعه است. و s t a t eستیآتیهترافیک را توصیف می کند t j a mتی�آمتر، کنترل ترافیک t c t r lتیجتی�ل، آهسته در حال حرکت ت s l o wتیسل��، حرکت آزاد t fr e eتی��ههو اطلاعات رویدادهای ترافیکی t e v e n tتیه�ه�تی.
یک مسیر r o u t e��توتیهموجودات مفهومی در دنیای واقعی مانند بزرگراه ها، رمپ ها یا بزرگراه ها را نشان می دهد و به صورت زیر تعریف می شود:
جایی که من d _�مندشناسه مسیر است و r n a m e��آمترهو r l�لبه ترتیب نام و طول را نشان دهید. پرچم ها t yp eتی�پهو s t a r tستیآ�تیمشابه تعریف سگمنت هستند. توجه داشته باشید که r o u t e��توتیههندسه ذخیره سازی را شامل نمی شود.
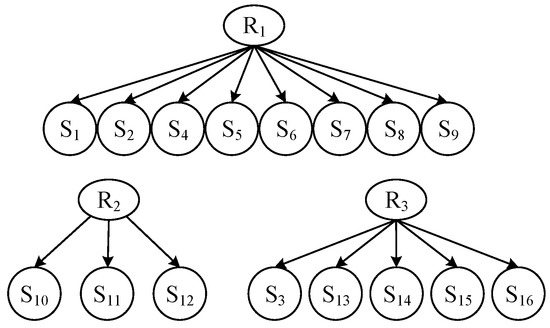
ساختار گراف مسیر جیrجی�از مجموعه ای از گره ها تشکیل شده است Vr��(مسیرها) و لبه ها Er��. به این صورت تعریف می شود:
رابطه Er��شامل دو نوع لبه است و به شرح زیر تعریف می شود:
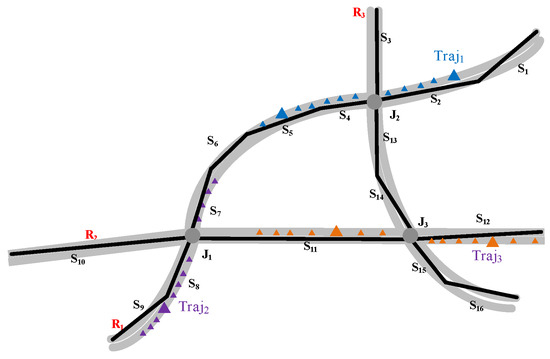
جایی که آرrrآر��نشان دهنده مجموعه ای از روابط فضایی بین دو مسیر و آرسrآر�سنشان دهنده این واقعیت است که یک مسیر شامل مجموعه ای از بخش ها است. شکل 3 نمونه ای از نمودار مسیر یک شبکه جاده ای را نشان می دهد (همانطور که در شکل 1 نشان داده شده است ). مسیر آر2آر2شامل سه بخش: س10س10، س11س11و س12س12.
3.4. نمایش شی متحرک
یک جسم متحرک به صورت زیر تعریف می شود:
جایی که o i d�مندو یک متر _ e�آمترهشناسایی و نام یک جسم متحرک هستند و p a r a mپآ�آمتربه مجموعه ویژگی های دیگر اشاره دارد.
ساختار گراف شی جیoجی�برای مدل سازی اجسام متحرک و روابط اجتماعی بین آنها استفاده می شود. به صورت زیر تعریف می شود:
جایی که Vo��به اجسام متحرک و Eo��روابط اجتماعی بین دو جسم متحرک را نشان می دهد:
موقعیت یک جسم متحرک gp o s�پ�سنشان دهنده موقعیت نسبی یک جسم متحرک در یک قطعه خاص و مختصات مطلق است. به صورت زیر تعریف می شود:
جایی که s i dسمندشناسه بخش است، p tپتیمختصات مکانی جسم را نشان می دهد و d موقعیت جسم متحرک را در شبکه نسبت به نشانگرهای فاصله در جاده ها توصیف می کند.
3.5. بازنمایی مسیر
m v e c t o rمتر�هجتی��برای مدل سازی بردار متحرک یک شی در زمان t استفاده می شود و به صورت زیر تعریف می شود:
جایی که m i dمترمندشناسه یک جسم متحرک است، v نشان دهنده سرعت لحظه ای در زمان t و gp o s�پ�سنشان دهنده موقعیت نسبی جسم در یک بخش خاص است.
ما تمام نقاط مکان یک جسم متحرک را در بخش فعلی به عنوان یک واحد مسیر جمع می کنیم تو نیستی _ _ _تیتو�منتی. به صورت زیر تعریف می شود:
جایی که s i dسمندشناسه سگمنت و m i dمترمندشناسه جسم متحرک است.
مسیر حرکت یک جسم متحرک t r a j e c t o r yتی�آ�هجتی���می تواند به عنوان مجموعه ای از واحدهای مسیر نمایش داده شود و به صورت زیر تعریف می شود:
ساختار نمودار حرکتی برای نشان دادن مسیر حرکت اجسام متحرک تعریف شده و شامل مجموعه ای از گره ها می باشد Vمتر�متر(واحدهای مسیر) و لبه ها Eمتر�متر(روابط بین واحدهای مسیر). به این صورت تعریف می شود:
رابطه Eمتر�متربه صورت زیر تعریف می شود:
جایی که آرمترمترآرمترمترنشان دهنده روابط ترتیبی بین واحدهای مسیری است که به یک مسیر تعلق دارند. آنها به بازیابی آسان کل مسیر حرکت یک جسم متحرک کمک می کنند. آرoمترآرمتر�نشان دهنده روابط بین یک واحد مسیر است تو نیستی _ _ _تیتو�منتیو یک جسم متحرک m oمتر�، و آرسمترآرمترسنشان دهنده روابط بین واحد مسیر است تو نیستی _ _ _تیتو�منتیو بخش s e gسه�. این روابط قابلیت یافتن تمام مسیرها را در یک بخش خاص فراهم می کند. در همین حال، ما همچنین میتوانیم تمام مسیرها را در یک مسیر خاص با کمک لبهها بازیابی کنیم. آرسrآر�س.
4. اپراتورها
این s e l e ctسهلهجتیعملگر تمام اشیاء متحرکی را که شرایط پرس و جو را برآورده می کنند، برمی گرداند، مانند مقدار فیلد ویژگی های اشیاء متحرک. به عنوان مثال، برای پیدا کردن یک وسیله نقلیه با گواهینامه “B-YI 65” روی یک نمودار شی جیoجی�، عبارت query به صورت زیر نوشته می شود:
این n o de va l u e s��ده�آلتوهسعملگر مقدار یک فیلد از ویژگی اجسام متحرک را دریافت می کند. به عنوان مثال، ما می خواهیم مدل یک وسیله نقلیه از جسم متحرک را بازیابی کنیم مترo—متر�̲; عبارت query به صورت زیر نوشته می شود:
این ge t n o de s�هتی��دهساپراتور تمام اشیاء متحرک مجاور، بخش ها یا واحدهای مسیر را بر اساس یک مقدار رابطه خاص برمی گرداند. به عنوان مثال، عبارت زیر به معنای بازیابی تمام بخشهایی است که برای آنها شی است مترo—متر�̲در حال حرکت است.
این ge t r a j e ct o r y�هتی�آ�هجتی���اپراتور مسیرها را بازیابی می کند t r a j e c t o r y——–تی�آ�هجتی���̲از یک جسم متحرک m o—متر�̲در تاریخ مشخص من n s t a n t——من�ستیآ�تی̲. به عنوان مثال، ما می خواهیم تمام مسیرهای یک وسیله نقلیه با گواهینامه “B-YI 65” در 22 ژانویه 2017 را پیدا کنیم. به این صورت نوشته شده است:
این a t i n s t a n t sآتیمن�ستیآ�تیساپراتور هر موقعیتی از یک جسم متحرک را بازیابی می کند m o—متر�̲در زمان من n s t a n t——من�ستیآ�تی̲. این عملگر به دلیل گسسته بودن مسیرها به عملیات درونیابی مسیر بین دو نقطه مجاور نیاز دارد. به عنوان مثال، یک سوال “خودرو با گواهینامه “B-YI 65″ در ساعت 10:00 در 22 ژانویه 2017 کجاست؟” را می توان به صورت زیر نوشت:
5. پرس و جوهای محک
6. آزمایشات
6.1. تنظیمات آزمایشی
6.2. نتایج تجربی
6.3. بحث
7. نتیجه گیری
منابع
- پلکیس، ن. Theodoridis, Y. Mobility Data Management and Exploration ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; صص 75-99. [ Google Scholar ]
- ژنگ، ی. داده کاوی مسیر: مروری. ACM Trans. هوشمند سیستم تکنولوژی 2015 ، 6 ، 29-48. [ Google Scholar ] [ CrossRef ]
- هاجری، ح. حکیم پور، ف. مدل داده های مکانی برای پایگاه داده های شی متحرک. بین المللی J. پایگاه داده Manag. سیستم 2014 ، 6 ، 1-20. [ Google Scholar ] [ CrossRef ]
- کنجیلال، وی. اشنایدر، ام. مدل سازی شبکه فضایی برای پایگاه های داده. در مجموعه مقالات سمپوزیوم ACM 2011 در محاسبات کاربردی، تایچونگ، تایوان، 21 تا 24 مارس 2011. صص 827-832.
- بوونانو، آ. D’Urso، M. پریسکو، جی. فلاکو، م. ملیادو، ای. ماتی، م. پالمیری، اف. Ciuonzo، D. شبکه های حسگر موبایل بر اساس پلت فرم های مستقل برای امنیت داخلی. در مجموعه مقالات کارگاه آموزشی Tyrrhenian 2012 در مورد پیشرفت در رادار و سنجش از راه دور (TyWRRS)، ناپل، ایتالیا، 12-14 سپتامبر 2012. صص 80-84.
- بروکس، آر آر. راماناتان، پی. سعید، AM طبقه بندی و ردیابی هدف توزیع شده در شبکه های حسگر. Proc. IEEE 2003 ، 91 ، 1163-1171. [ Google Scholar ] [ CrossRef ]
- سیونزو، دی. بوونانو، آ. D’Urso، M. Palmieri، FA طبقه بندی توزیع شده اهداف متحرک چندگانه با شبکه های حسگر بی سیم باینری. در مجموعه مقالات چهاردهمین کنفرانس بین المللی در همجوشی اطلاعات، شیکاگو، IL، ایالات متحده آمریکا، 5 تا 8 ژوئیه 2011; صص 1-8.
- داکوستا، آ. راماچاندران، وی. سعید، AM طبقه بندی توزیع شده منابع فضا-زمان گاوسی در شبکه های حسگر بی سیم. IEEE J. Sel. مناطق کمون. 2004 ، 22 ، 1026-1036. [ Google Scholar ] [ CrossRef ]
- هوانگ، اس.-سی. چن، بی.-اچ. تشخیص شی متحرک بسیار دقیق در سیستمهای نظارت بر ترافیک مبتنی بر نرخ بیت متغیر. IEEE Trans. شبکه عصبی فرا گرفتن. سیستم 2013 ، 24 ، 1920-1931. [ Google Scholar ] [ CrossRef ]
- هوانگ، اس.-سی. Jiau، M.-K. Hsu، C.-A. یک سیستم حاشیه نویسی صورت مشارکتی کاملاً خودکار با کارایی بالا و دقت بالا برای شبکه های اجتماعی آنلاین توزیع شده. IEEE Trans. سیستم مدار. فناوری ویدئو 2014 ، 24 ، 1800-1813. [ Google Scholar ] [ CrossRef ]
- چنگ، F.-C.; چن، B.-H.; هوانگ، اس.-سی. یک روش تفریق پسزمینه ترکیبی با تشخیص نامزدهای پسزمینه و پیشزمینه. ACM Trans. هوشمند سیستم تکنولوژی 2015 ، 7 ، 141-160. [ Google Scholar ] [ CrossRef ]
- یان، تی. ژانگ، دبلیو. Wang, G. DOVE: انتشار داده ها به تعداد دلخواه گیرنده در VANET. IEEE Trans. وه تکنولوژی 2014 ، 63 ، 1903-1916. [ Google Scholar ] [ CrossRef ]
- یان، تی. ژانگ، دبلیو. وانگ، جی. Zhang, Y. برنامه ریزی نقاط دسترسی در منطقه شهری برای انتشار داده ها به رانندگان. IEEE Trans. وه تکنولوژی 2014 ، 63 ، 390-402. [ Google Scholar ] [ CrossRef ]
- گوتینگ، RH; Ding, Z. مدلسازی و پرس و جوی اشیاء متحرک در شبکه ها. VLDB J. 2006 ، 15 ، 165-190. [ Google Scholar ] [ CrossRef ]
- پدر و مادر، سی. اسپاکاپیترا، اس. رنسو، سی. آندرینکو، جی. آندرینکو، ن. بوگورنی، وی. دامیانی، ام.ال. گکولالاس-دیوانیس، ع. مکدو، جی. پلکیس، N. مدلسازی و تحلیل مسیرهای معنایی. کامپیوتر ACM. Surv. 2013 ، 45 ، 111-120. [ Google Scholar ] [ CrossRef ]
- اشنایدر، ام. اشیاء متحرک در پایگاه های داده و GIS: مسائل پیشرفته و باز. در گرایش های پژوهشی در علم اطلاعات جغرافیایی ; Springer: برلین/هایدلبرگ، آلمان، 2009; صص 169-187. [ Google Scholar ]
- ولفسون، او. چمبرلین، اس. کالپاکیس، ک. Yesha, Y. مدلسازی اشیاء متحرک برای خدمات مبتنی بر مکان. در توسعه زیرساخت برای سیستم های موبایل و بی سیم ; Springer: برلین/هایدلبرگ، آلمان، 2002; ص 46-58. [ Google Scholar ]
- خو، جی. گوتینگ، RH; ژنگ، ی. TM-RTree: شاخصی در مورد اشیاء متحرک عمومی برای جستارهای محدوده. GeoInformatica 2015 ، 19 ، 487-524. [ Google Scholar ] [ CrossRef ]
- هو، دبلیو. یانگ، ی. ژانگ، دبلیو. Xie, Y. تشخیص شی متحرک با استفاده از تجزیه با رتبه پایین و پراکنده ذوب شده بر اساس تانسور. IEEE Trans. فرآیند تصویر 2017 ، 26 ، 724-737. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- دینگ، ز. Güting, R. مدلسازی شبکه های حمل و نقل متغیر زمانی. سیستم پایگاه داده Adv. Appl. 2004 ، 2973 ، 651-724. [ Google Scholar ]
- دینگ، ز. Güting، RH مدیریت اجسام متحرک در شبکه های حمل و نقل پویا. در مجموعه مقالات شانزدهمین کنفرانس بین المللی مدیریت پایگاه داده های علمی و آماری، جزیره سانتورینی، یونان، 21 تا 23 ژوئن 2004. ص 287-296.
- چن، جی. منگ، ایکس. گوا، ی. گرومباخ، اس. Sun، H. مدل سازی و پیش بینی مسیرهای آینده اجسام متحرک در یک شبکه محدود. در مجموعه مقالات هفتمین کنفرانس بین المللی مدیریت داده های تلفن همراه (MDM’06)، نارا، ژاپن، 10–12 مه 2006; پ. 156.
- چی، ال. اشنایدر، M. MONET: مدلسازی و پرس و جوی اجسام متحرک در شبکه های فضایی. در مجموعه مقالات سومین کارگاه بین المللی ACM SIGSPATIAL در زمینه ژئواستریمینگ، ساحل ردوندو، کالیفرنیا، ایالات متحده آمریکا، 7 تا 9 نوامبر 2012. صص 48-57.
- دونتگن، سی. بهر، ت. گوتینگ، RH BerlinMOD: معیاری برای پایگاههای داده شی متحرک. VLDB J. 2009 ، 18 ، 1335-1368. [ Google Scholar ] [ CrossRef ]
- چن، توسط; یوان، اچ. لی، کیو. لام، WH; شاو، اس.-ال. Yan, K. الگوریتم تطبیق نقشه برای دادههای خودرو شناور با فرکانس پایین در مقیاس بزرگ. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 22-38. [ Google Scholar ] [ CrossRef ]
- چو، اس.-ک. Jiau، M.-K. هوانگ، اس.-سی. بهینه سازی ازدحام ذرات مبتنی بر مجموعه تصادفی بر اساس اکتشاف محلی برای حل مشکل سرویس کارپول. IEEE Trans. سایبرن. 2016 ، 46 ، 1771-1783. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هوانگ، اس.-سی. چن، بی.-اچ. استخراج خودکار شیء متحرک از طریق یک شبکه با پهنای باند متغیر دنیای واقعی برای سیستم های نظارت بر ترافیک. IEEE Trans. الکترون صنعتی 2014 ، 61 ، 2099-2112. [ Google Scholar ] [ CrossRef ]
- جنسن، CS; کولاور، ج. پدرسن، سل؛ تیمکو، I. پرس و جوهای نزدیکترین همسایه در شبکه های جاده ای. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 3-8 نوامبر 2003. صص 1-8.
- شکر، س. یو، JS پردازش در مسیر پرس و جوهای نزدیکترین همسایه: مقایسه رویکردهای جایگزین. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 3-8 نوامبر 2003. صص 9-16.
- وزیرگیانیس، م. ولفسون، او. مدل و زبان فضایی-زمانی برای اجسام متحرک در شبکه های جاده ای. در مجموعه مقالات هفتمین سمپوزیوم بین المللی پیشرفت در پایگاه های داده مکانی و زمانی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 12 تا 15 ژوئیه 2001. ص 20-35.
- اسپیچوسیس، ال. جنسن، CS; Kligys، A. مدل سازی داده های محاسباتی برای اشیاء متحرک محدود شده در شبکه. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، نیواورلئان، لس آنجلس، ایالات متحده آمریکا، 3-8 نوامبر 2003. صص 118-125.
- خو، جی. Güting، RH یک مدل داده عمومی برای اجسام متحرک. Geoinformatica 2013 ، 17 ، 125-172. [ Google Scholar ] [ CrossRef ]
- چن، توسط; یوان، اچ. لی، کیو. شاو، اس.-ال. لام، WH; چن، X. مدل داده های مکانی-زمانی برای تحلیل جغرافیایی زمان شبکه در عصر داده های بزرگ. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 1041-1071. [ Google Scholar ] [ CrossRef ]
- دینگ، ز. یانگ، بی. گوتینگ، RH; Li, Y. پایگاه داده شی متحرک مبتنی بر مسیر مبتنی بر شبکه: مدلها و برنامهها. IEEE Trans. هوشمند ترانسپ سیستم 2015 ، 16 ، 1918-1928. [ Google Scholar ] [ CrossRef ]
- دینگ، ز. یانگ، بی. چی، ی. Guo, L. فعال کردن سیستم های حمل و نقل هوشمند: رویکرد پایگاه داده مکانی-زمانی موازی. IEEE Trans. محاسبه کنید. 2016 ، 65 ، 1377–1391. [ Google Scholar ] [ CrossRef ]
- گوتینگ، RH; Böhlen، MH; ارویگ، م. جنسن، CS; لورنتزوس، NA; اشنایدر، ام. Vazirgiannis، M. بنیادی برای بازنمایی و جستجوی اشیاء متحرک. ACM Trans. سیستم پایگاه داده 2000 ، 25 ، 1-42. [ Google Scholar ] [ CrossRef ]
- گوتینگ، RH; آلمیدا، وی. آنسورج، دی. بهر، ت. دینگ، ز. هوس، تی. هافمن، اف. اسپیکرمن، ام. Telle، U. SECONDO: یک پلت فرم DBMS توسعه پذیر برای نمونه سازی و آموزش تحقیقاتی. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی مهندسی داده (ICDE’05)، توکیو، ژاپن، 5-8 آوریل 2005. صص 1115–1116.
- ژانگ، اچ. لو، اف. Xu, J. مدل سازی و پرس و جو از اشیاء متحرک با روابط اجتماعی. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 121. [ Google Scholar ] [ CrossRef ]



© 2017 توسط نویسندگان. دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC BY) ( http://creativecommons.org/licenses/by/4.0/ ) توزیع شده است.
بدون نظر