

خلاصه
موقعیت یابی داخلی ؛ خوشه بندی انتشار تمایل ; فیوژن ویژگی ; عابر پیاده احتساب مرده ; همجوشی چند سنسوری
1. معرفی
2. فناوری موقعیت یابی بی سیم بر اساس قدرت میدانی
2.1. استخراج ویژگی ادغام اطلاعات فاصله و سیگنال
که در آن m _ij به تعداد APها با قدرت سیگنال غیر صفر دریافت شده در هر دو مکان مربوط به l i و l j اشاره دارد . به طور معمول، مقدار m _ij زمانی که موقعیت های مربوط به l i و l j در نزدیکی یکدیگر باشند بسیار بزرگتر است و بالعکس . از آنجایی که مقدار m _ij می تواند رابطه فاصله فضایی بین نقاط مربوطه را تا حدی منعکس کند، معرفی متغیر m _ijهنگام محاسبه فاصله سیگنال، می تواند مقدار فاصله سیگنال را بین نقاط مسافت طولانی افزایش دهد و مقدار فاصله سیگنال بین نقاط فاصله کوتاه را کاهش دهد. فاصله جغرافیایی بین دو نقطه نمونه برداری به صورت تعریف شده است
که در آن تابع Min-Max نرمال شده نیست. ویژگی همجوشی به دست آمده با تغییر فاصله سیگنال با موقعیت جغرافیایی می تواند رابطه جغرافیایی بین نقاط نمونه برداری را بهتر منعکس کند و توزیع کلاس خوشه ای یکنواخت تر و به تقسیم ساختار فضایی نزدیک تر است.
2.2. خوشه بندی انتشار قرابت
(1) پیام جاذبه r ( i ، j )
که در آن s ( i, j ) به MixDis ( i, j ) اشاره دارد و a ( i, j ) پیام انتساب است که در زیر تعریف شده است.
(2) پیام انتساب a ( i ، j ).
(3) پیام خود انتساب:
2.3. جستجوی مجموعه نقطه تعیین موقعیت
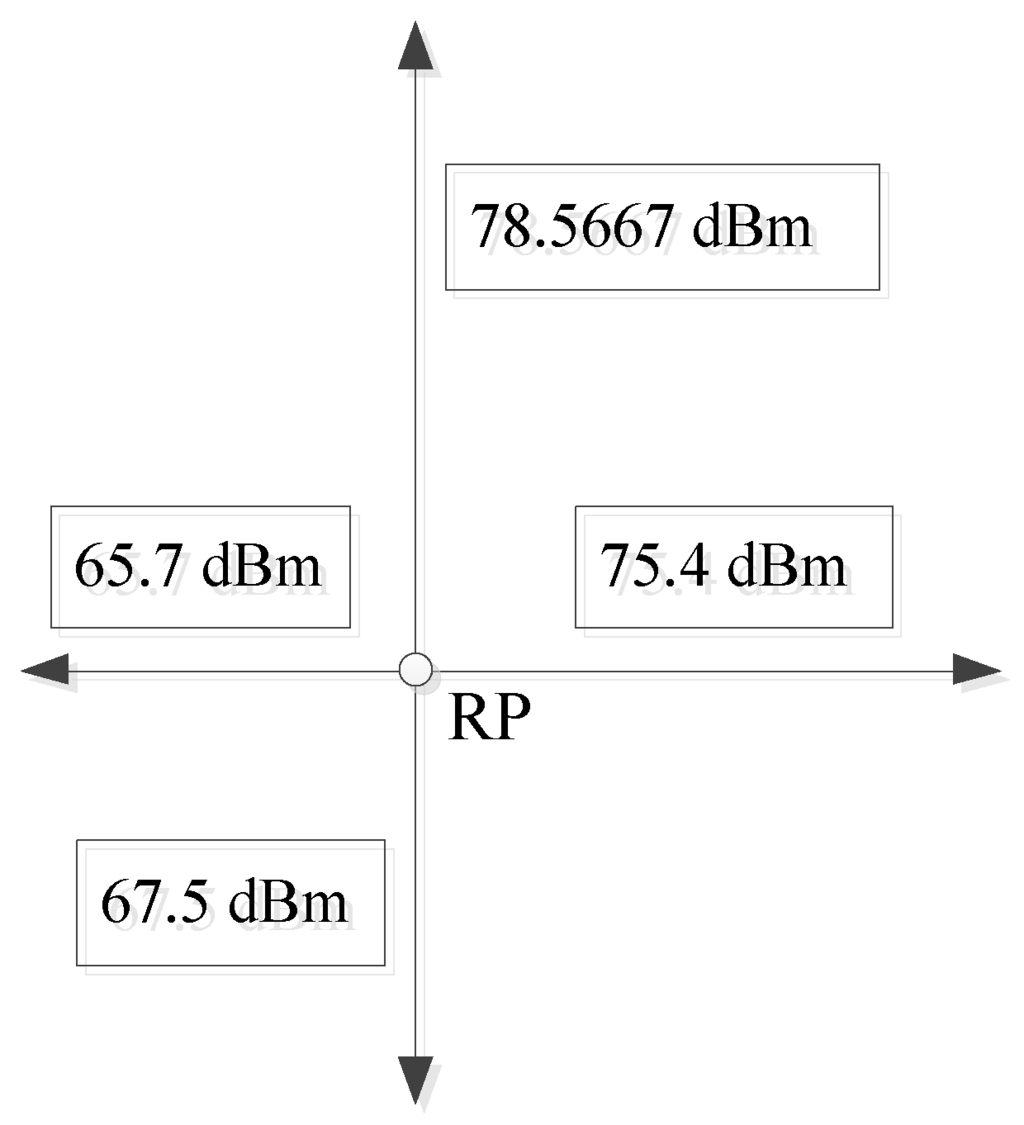
که در آن ( xi ، y i ) مختصات i امین نزدیکترین RP در مجموعه کلاس اثر انگشت تعیین شده است ،(ایکس^،y^) نتیجه موقعیت یابی است و d i فاصله دامنه سیگنال بین i امین نزدیکترین RP و نقطه ای است که در کلاس تعیین شده قرار می گیرد. با توجه به معادله (7) برخی دیگر از محققین استفاده کردند 1/دمن2بجای 1/دمن[ 31 ]. از منظر کارایی محاسباتی، استفاده از 1/د2تاثیر فاصله سیگنال بر نتیجه محاسبه را بیشتر خواهد کرد. به عبارت دیگر، نتیجه موقعیت یابی نهایی به چنین RP که فاصله سیگنال کمتری دارد، تمایل دارد. با این حال، از آنجا که فاصله بین دو RP در این مقاله نسبتاً کوچک است، در 1.2 × 1.2 متر مربع ، چنین اصلاحی به طور قابل توجهی بر نتیجه موقعیت یابی تأثیر نمی گذارد.
3. الگوریتم PDR و Wi-Fi Fusion
3.1. فیلتر صاف کننده وزن تطبیقی بر اساس محدودیت جابجایی
جایی که (نکEک)مختصات خروجی سیستم همجوشی را در لحظه k نشان می دهد ، (نک،w،Eک،w)مختصات خروجی سیستم موقعیت یابی Wi-Fi در لحظه k است ، (نک،پ،Eک،پ)مختصات خروجی از سیستم PDR در لحظه k است و (w1،w2) وزن است. با توجه به داده های تجربی، اندازه گیری نشان می دهد که بهترین نتایج موقعیت یابی زمانی حاصل می شود w1و w2به ترتیب 0.4 و 0.6 هستند.
3.2. فیلتر نویز سیستم تطبیقی بر اساس وضعیت حرکت عابر پیاده
که در آن N و E نشان دهنده مختصات سیستم موقعیت یابی در شمال و شرق به ترتیب در زمان واقعی به دست آمده است. s مقدار مرحله ای است که توسط الگوریتم PDR در زمان واقعی محاسبه می شود. و θ زاویه مسیر در جهت حرکت است. هنگامی که موقعیت سیستم Wi-Fi به روز می شود، تفاوت موقعیت بین سیستم های Wi-Fi و PDR به عنوان مقدار مشاهده شده سیستم در نظر گرفته می شود. برای مثال،
جایی که (Δن،ΔE)نشان دهنده اختلاف موقعیت بین دو سیستم در نقطه زمانی k است ، (نw،ک،Ew،ک)نتیجه موقعیت یابی سیستم Wi-Fi در نقطه زمانی k است و (نپ،ک،Eپ،ک)اطلاعات موقعیت در نقطه زمانی k بر اساس اصل محاسبه مرده محاسبه می شود.
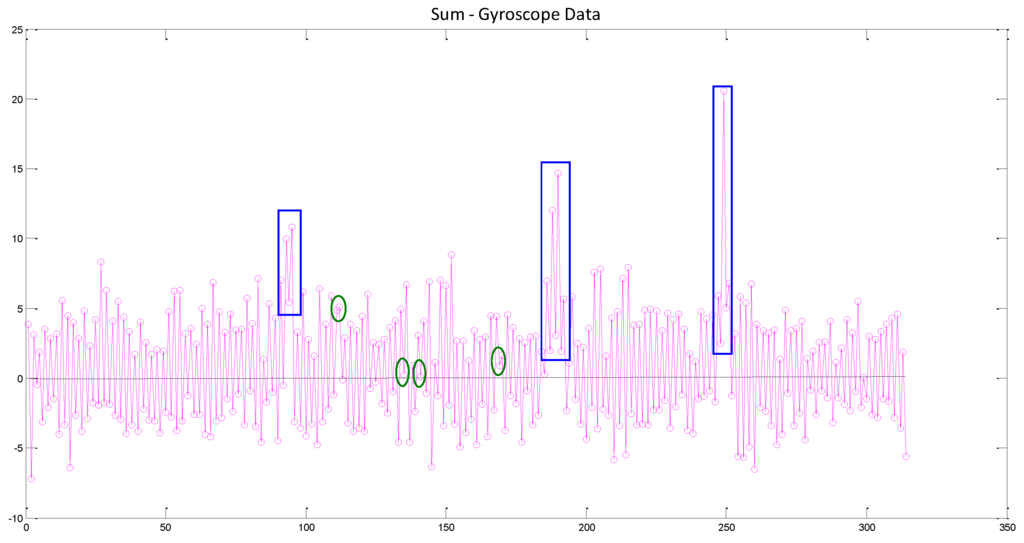
جایی که آرw=102. با توجه به موقعیت واقعی که در آن ارزش دوره wθهنگام چرخش بزرگتر و هنگام حرکت مستقیم کوچکتر است، به طور تطبیقی مقدار نویز دینامیکی متغیرهای مربوط به مسیر را با قضاوت ویژگی های حرکت عابر پیاده (مستقیم یا چرخشی) تعیین کنید. از مقدار انباشته SGyr (rad/s) داده های ژیروسکوپ در هر مرحله برای تعیین ویژگی های حرکتی کاربران موبایل استفاده کنید. شرایط قضاوت عطف هستند
که در آن مختصات پیش بینی شده توسط سیستم می تواند از طریق روش زیر به روز شود:
4. تجزیه و تحلیل تجربی
4.1. تجزیه و تحلیل موقعیت یابی وای فای

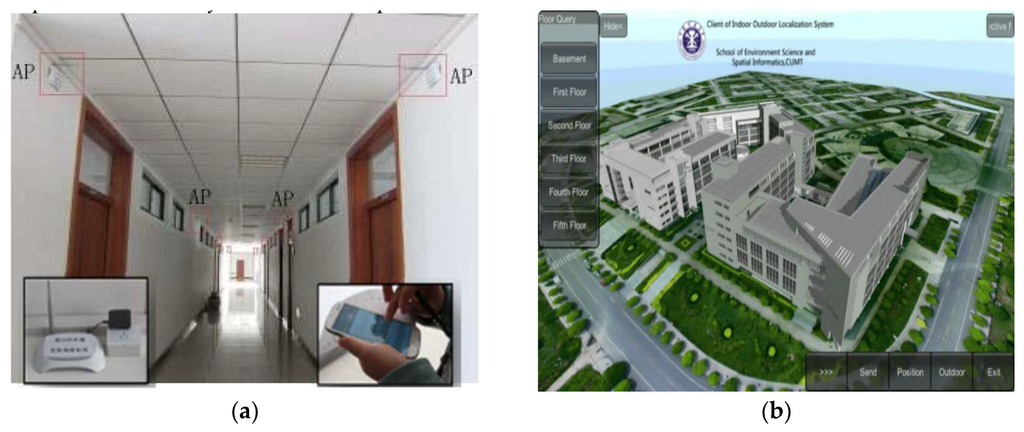
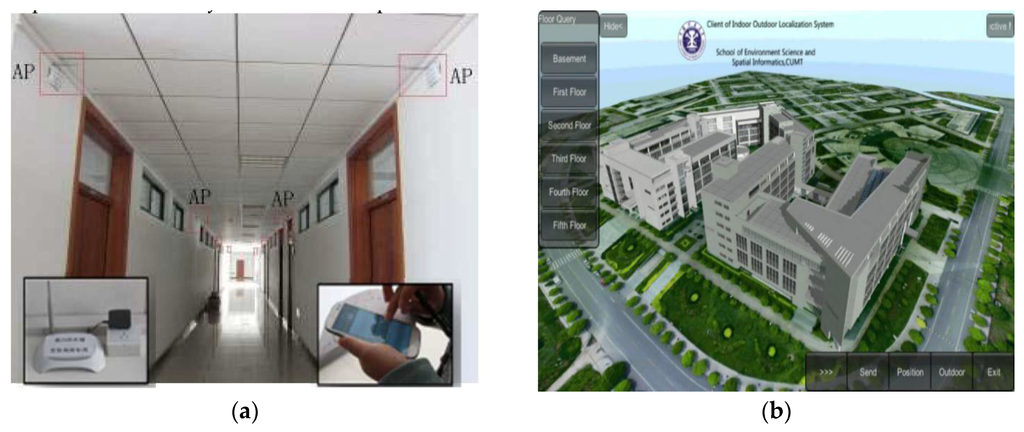
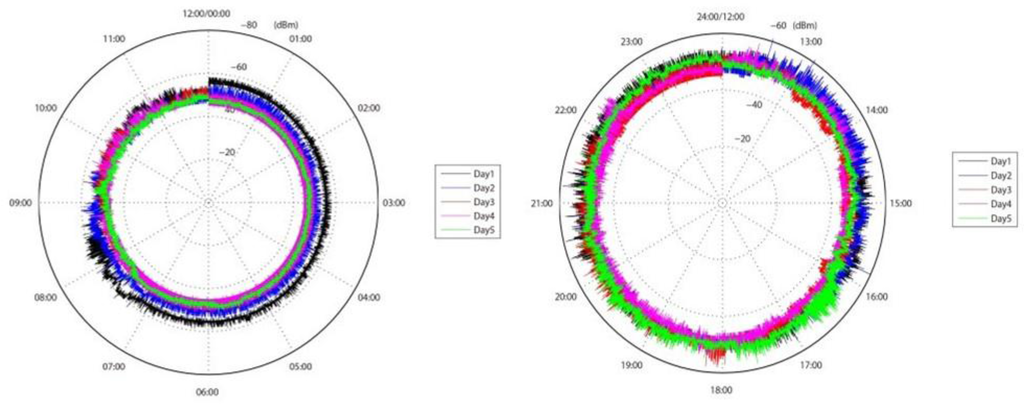
(1) جمع آوری و پیش پردازش داده های آفلاین

(2) تجزیه و تحلیل خوشه بندی



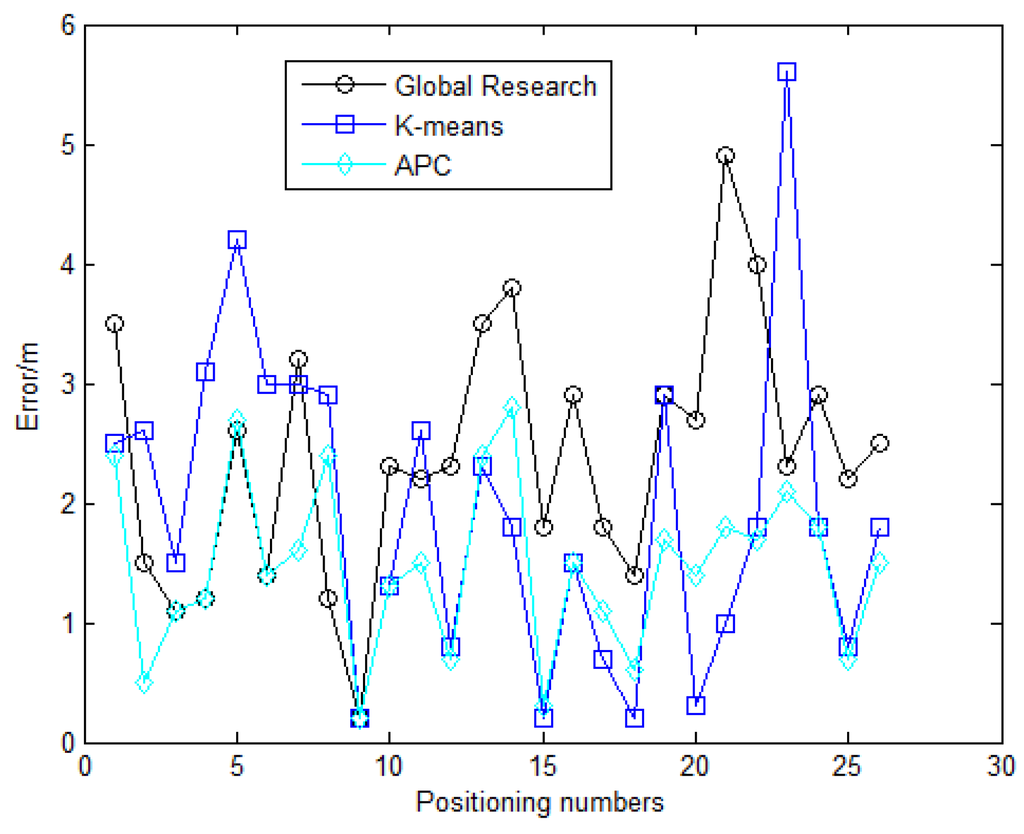
(3) نتایج تجزیه و تحلیل موقعیت استاتیک

(4) ساختار مش مثلث نقاط اثر انگشت

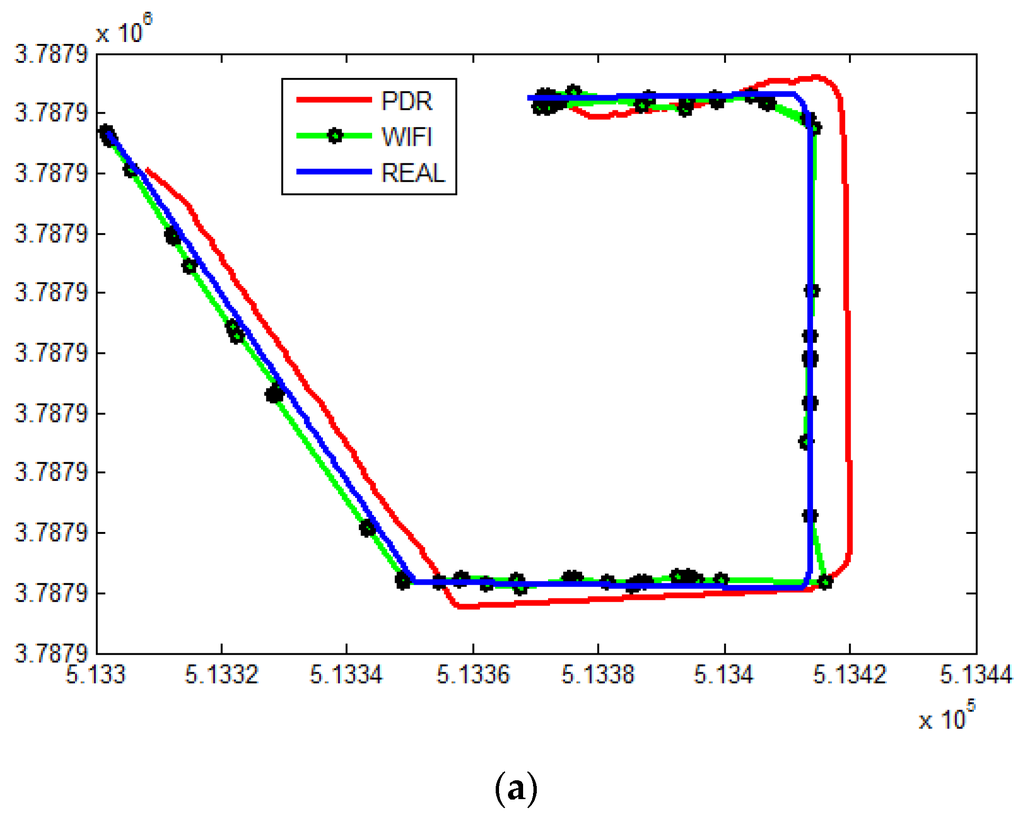
4.2. تجزیه و تحلیل فیوژن



5. نتیجه گیری ها
منابع
- محفوظ، محمدرضا; کوهن، ام جی; به، G. Fathy، AE ادغام UWB و نقشه فشار بی سیم در ناوبری جراحی. IEEE Trans. مایکرو. فناوری تئوری 2009 ، 57 ، 2550-2564. [ Google Scholar ] [ CrossRef ]
- گو، ی. لو، ا. Niemegeers, I. بررسی سیستم های موقعیت یابی داخلی برای شبکه های شخصی بی سیم. IEEE Commun. Surv. معلم خصوصی 2009 ، 11 ، 13-32. [ Google Scholar ] [ CrossRef ]
- هایتاور، جی. Borriello, G. سیستم های مکان برای محاسبات همه جا حاضر. کامپیوتر 2001 ، 34 ، 57-66. [ Google Scholar ] [ CrossRef ]
- لی، اف. ژائو، سی. دینگ، جی. گونگ، جی. لیو، سی. Zhao، F. یک روش قابل اطمینان و دقیق مکان یابی داخلی با استفاده از حسگرهای اینرسی تلفن. در مجموعه مقالات کنفرانس ACM 2012 در محاسبات همه جا حاضر، پیتسبورگ، PA، ایالات متحده آمریکا، 5-8 سپتامبر 2012. ص 421-430.
- پهلوان، ک. لی، ایکس. ماکلا، جی.-پی. علم و فناوری مکان یابی داخلی IEEE Commun. Mag. 2002 ، 40 ، 112-118. [ Google Scholar ] [ CrossRef ]
- خیمنز، ا. سکو، اف. پریتو، سی. گوارا، جی. مقایسه الگوریتمهای محاسبه مرده عابر پیاده با استفاده از یک MEMS IMU کمهزینه. در مجموعه مقالات سمپوزیوم بین المللی IEEE 2009 در مورد پردازش هوشمند سیگنال، بوداپست، مجارستان، 26-28 اوت 2009. صص 37-42.
- Mautz, R. چالش های محیط های داخلی و مشخصات در برخی از سیستم های موقعیت یابی جایگزین. در مجموعه مقالات ششمین کارگاه موقعیت یابی، ناوبری و ارتباطات، هانوفر، آلمان، 19 مارس 2009. صص 29-36.
- مارانو، اس. گیفورد، WM; وایمیرش، اچ. Win، MZ NLOS شناسایی و کاهش برای بومی سازی بر اساس داده های تجربی uwb. IEEE J. Sel. مناطق کمون. 2010 ، 28 ، 1026-1035. [ Google Scholar ] [ CrossRef ]
- Foxlin، E. ردیابی عابر پیاده با سنسورهای اینرسی نصب شده روی کفش. محاسبات IEEE. نمودار. Appl. 2005 ، 25 ، 38-46. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کولومار، دی اس؛ نیلسون، جی. هندل، P. صاف کردن برای INSS با کمک Zupt. در مجموعه مقالات کنفرانس بین المللی 2012 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، سیدنی، NSW، استرالیا، 13 تا 15 نوامبر 2012. صص 1-5.
- جیمنز، آر. سکو، اف. پریتو، جی سی. گوارا، جی. ناوبری عابر پیاده در داخل ساختمان با استفاده از چارچوب INS/EKF برای کاهش رانش انحرافی و IMU روی پا. در مجموعه مقالات هفتمین کارگاه آموزشی جهت یابی موقعیت یابی و ارتباطات، درسدن، آلمان، 8 ژوئن 2010; صص 135-143.
- هارل، آر. بررسی سیستم های موقعیت یابی اینرسی داخلی برای عابران پیاده. IEEE Commun. Surv. معلم خصوصی 2013 ، 15 ، 1281-1293. [ Google Scholar ] [ CrossRef ]
- رویز، ARJ; Granja، FS; Prieto Honorato، JC; Rosas، JIG ناوبری دقیق عابر پیاده در داخل ساختمان با اتصال محکم اندازهگیریهای IMU و RFID روی پا. IEEE Trans. ساز. Meas. 2012 ، 61 ، 178-189. [ Google Scholar ] [ CrossRef ]
- آدامز، دی. مقدمه ای بر ناوبری اینرسی. جی. ناویگ. 1956 ، 9 ، 249-259. [ Google Scholar ] [ CrossRef ]
- جیمنز، آر. زامپلا، اف. Seco، F. بهبود محاسبه مرده عابر پیاده با تشخیص لامپ های روشن نشده اصلاح نشده در ساختمان ها. Sensors 2014 , 14 , 731-769. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ویدیاوان; پیرکلب، جی. Munarettoc، D.; فیشرد، سی. آنه، سی. لوکوویچب، پ. کلپالف، ام. تیم-گیلگ، آ. ویدمر، جی. پش، دی. و همکاران خط حیات مجازی: ادغام داده های حسگر چندوجهی برای ناوبری قوی در محیط های ناشناخته. اوباش فراگیر. محاسبه کنید. 2012 ، 8 ، 388-401. [ Google Scholar ] [ CrossRef ]
- لی، ی. ژانگ، ی. لان، اچ. ژانگ، پی. نیو، ایکس. El-Sheimy، N. تطبیق مغناطیسی به کمک وای فای برای ناوبری داخلی با دستگاه های قابل حمل مصرف کننده. Micromachines 2015 ، 6 ، 747-764. [ Google Scholar ] [ CrossRef ]
- ماسیرو، آ. گوارنیری، آ. پیروتی، اف. Vettore, A. فیلتر ذرات برای پیمایش عابر پیاده داخلی مبتنی بر تلفن هوشمند. Micromachines 2014 ، 5 ، 1012-1033. [ Google Scholar ] [ CrossRef ]
- جینامو، جی. کوربی، سی. فرانسینی، جی. لپسوی، اس. لوویسولو، پی. لینگوا، ا. Aicardi، I. راه حل جستجوی تصویری MPEG7 برای موقعیت یابی مبتنی بر تشخیص تصویر با استفاده از مدل های سه بعدی. در مجموعه مقالات بیست و هفتمین نشست فنی بینالمللی بخش ماهواره مؤسسه ناوبری، تامپا، فلوریدا، ایالات متحده آمریکا، 8 تا 12 سپتامبر 2014.
- سعیدی، س. موسی، ع. El-Sheimy، N. ناوبری شخصی با آگاهی از زمینه با استفاده از ترکیب حسگر تعبیه شده در گوشی های هوشمند. Sensors 2014 , 14 , 5742-5767. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لینگ، پی. چن، آر. لیو، جی. استفاده از توزیعهای احتمال بلوتوث RSSI مبتنی بر پرسش برای موقعیتیابی داخلی. جی. گلوب. موقعیت. سیستم 2010 ، 9 ، 122-130. [ Google Scholar ]
- یوسف، MA; آگراوالا، ا. شانکار، AU; نه، SH یک سیستم تعیین مکان داخلی مبتنی بر خوشهبندی احتمالی. در دسترس آنلاین: http://www.cs.umd.edu/~moustafa/papers/locdet_tr.pdf (در 23 آوریل 2015 قابل دسترسی است).
- یوسف، م. Agrawala، A. دست زدن به همبستگی نمونه در سیستم Horus. در مجموعه مقالات بیست و سومین کنفرانس مشترک سالانه انجمن های کامپیوتر و ارتباطات IEEE، هنگ کنگ، چین، 7 تا 11 مارس 2004.
- یوسف، م. Agrawala، A. تعیین مکان از طریق خوشه بندی و توزیع احتمال. محاسبات فراگیر اشتراک. 2003 ، 8 ، 143-150. [ Google Scholar ]
- شین، بی. لی، جی اچ. لی، تی. الگوریتم Kim، HS پیشرفته K وزنی نزدیکترین همسایه برای سیستم های موقعیت یابی Wi-Fi داخلی. در مجموعه مقالات هشتمین کنفرانس بین المللی فناوری محاسبات و مدیریت اطلاعات (ICCM)، سئول، کره جنوبی، 24-26 آوریل 2012.
- Kuo، SP Cluster تکنیکها را برای سیستمهای محلیسازی تطبیق الگو افزایش میدهد. اوباش سنسور Ad-Hoc. 2007 ، 7 ، 1-9. [ Google Scholar ]
- باهل، ص. Padmanabhan، VN RADAR: یک سیستم مکان یابی و ردیابی کاربر مبتنی بر RF در ساختمان. در مجموعه مقالات نهمین کنفرانس مشترک سالانه انجمن های کامپیوتر و ارتباطات IEEE، تل آویو، اسرائیل، 26 تا 30 مارس 2000. صص 775-784.
- کلینگ بیل، ال. Wark, T. یک شبکه حسگر بی سیم برای مکان یابی داخلی و نظارت بر حرکت در زمان واقعی. در مجموعه مقالات هفتمین کنفرانس بین المللی پردازش اطلاعات در شبکه های حسگر، سنت لوئیس، MO، ایالات متحده آمریکا، 22-24 آوریل 2008; صص 39-50.
- فری، بی جی؛ Dueck، D. خوشه بندی با ارسال پیام بین نقاط داده. Science 2007 ، 315 ، 972-976. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یو، اف. جیانگ، م. لیانگ، جی. محلیسازی وایفای داخلی بر اساس الگوریتم شاخهای. در مجموعه مقالات کنفرانس بین المللی علوم اطلاعات، الکترونیک و مهندسی برق 2014 (ISEEE)، ساپورو، ژاپن، 26-28 آوریل 2014. ص 1306–1308.
- آهنگ، ال. هازیناکوس، دی. معماری چند لایه شبکه های حسگر بی سیم برای ردیابی هدف. IEEE/ACM Trans. شبکه 2007 ، 15 ، 145-158. [ Google Scholar ] [ CrossRef ]
- Cho, SY; سیستم ناوبری عابر پیاده مبتنی بر پارک، CG MEMS. جی. ناویگ. 2006 ، 6 ، 135-153. [ Google Scholar ] [ CrossRef ]
- کلپال، م. Beauregard، S. یک فیلتر ذرات عقبگرد برای ترکیب نقشههای ساختمان با تخمینهای جابجایی PDR. در مجموعه مقالات پنجمین کارگاه آموزشی موقعیت یابی، ناوبری و ارتباطات، هانوفر، آلمان، 27 مارس 2008; ص 207-212.
- چن، جی. منگ، ایکس. وانگ، ی. ژانگ، ی. تیان، پی. یانگ، اچ. WiFi/PDR/تلفن هوشمند یکپارچه با استفاده از الگوریتم فیلتر کالمن بدون عطر برای محلیسازی سهبعدی فضای داخلی. Sensors 2015 , 15 , 24595–24614. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چن، دبلیو. چن، آر. چن، ی. کوسنیمی، اچ. وانگ، جی. Fu، Z. یک الگوریتم محاسبه مرده عابر پیاده موثر با استفاده از یک مدل خطای عنوان یکپارچه. در مجموعه مقالات سمپوزیوم موقعیت مکانی و ناوبری IEEE/ION 2010 (PLANS)، ایندین ولز، کالیفرنیا، ایالات متحده آمریکا، 4 تا 6 مه 2010. صص 340-347.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons by Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر