

خلاصه
در سالهای اخیر، دادههای خودروی شناور سلولی (CFVD) یک تکنیک برآورد اطلاعات ترافیکی محبوب برای تجزیه و تحلیل دادههای شبکه سلولی و ارائه اطلاعات ترافیک در زمان واقعی با پوشش بالاتر و هزینه کمتر بوده است. بنابراین، این مطالعه روشهای تعیین موقعیت و تخمین سرعت خودرو را برای گرفتن CFVD و ردیابی ایستگاههای سیار (MS) برای سیستمهای حمل و نقل هوشمند (ITS) پیشنهاد میکند. سه ویژگی CFVD، که شامل شناسهها، توالی و زمان ماندگاری سلولهای متصل از سیگنالهای ارتباط MS است، استخراج و تحلیل میشوند. ویژگی توالی را می توان برای قضاوت جهت جاده شهری مورد استفاده قرار داد، و ویژگی زمان سکونت سلولی را می توان برای تمایز جاده های شهری نزدیک به کار برد. نتایج آزمایش دقت روش تعیین موقعیت وسیله نقلیه پیشنهادی را نشان میدهد، که 100% بهتر از سایر روش های یادگیری ماشینی رایج است (به عنوان مثال، طبقه بندی ساده بیز، درخت تصمیم، ماشین بردار پشتیبان و شبکه عصبی پس انتشار). علاوه بر این، دقت روش پیشنهادی با تمام ویژگیها (یعنی شناسهها، توالی و زمان ماندگاری سلولهای متصل) برای تخمین سرعت 81/83 درصد است. بنابراین، روش های پیشنهادی مبتنی بر CFVD برای تشخیص وضعیت ترافیک جاده های شهری مناسب هستند.
کلید واژه ها:
سیستم حمل و نقل هوشمند ؛ شبکه های تلفن همراه ؛ موقعیت یابی خودرو ؛ تخمین سرعت ; فراگیری ماشین
1. معرفی
در چند سال گذشته، یک انفجار فنی انقلابی را متحول کرده و از مدیریت و کنترل حمل و نقل برای سیستم های حمل و نقل هوشمند (ITS) حمایت کرده است. ITS می تواند اطلاعات ترافیکی (به عنوان مثال، جریان ترافیک، تراکم ترافیک و سرعت وسیله نقلیه) را برای کاربران و مدیران جاده برای بهبود سطح خدمات شبکه جاده ای تخمین زده و به دست آورد. اطلاعات ترافیک را می توان با سه رویکرد جمع آوری و تخمین زد که عبارتند از: (1) تشخیص وسیله نقلیه (VD) [ 1 ، 2 ، 3 ]. (2) گزارش خودروی کاوشگر مجهز به سیستم موقعیت یابی جهانی (GPS) [ 4 ، 5 ، 6 ، 7 ]؛ و (3) داده های وسیله نقلیه شناور سلولی (CFVD) [ 8]. با این حال، داده های خودرو (VD) هزینه های نصب و نگهداری بالایی دارد. هنگامی که ضریب نفوذ خودروهای کاوشگر مجهز به GPS بسیار کم باشد، گزارش خودروی کاوشگر مجهز به GPS از دقت پایینی برخوردار است. CFVD را می توان از تلفن های همراه به دست آورد که در بسیاری از کشورها نفوذ بالایی دارند [ 9 ]، و برخی مطالعات اشاره کردند که CFVD می تواند برای تخمین وضعیت ترافیک با دقت بالا استفاده شود [ 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16. , 17 , 18 , 19 , 20 , 21 , 22 , 23 , 24, 25 , 26 , 27 ]. جمع آوری اطلاعات ترافیک با استفاده از CFVD اقتصادی و کم هزینه است.
برای تخمین اطلاعات ترافیک بر اساس CFVD، برخی از مطالعات روشهایی را برای تجزیه و تحلیل سیگنالهای نشانههای قدرت سیگنال دریافتی (RSSIs)، انتقالها (HOs)، ورود تماسها (CAs)، بهروزرسانیهای مکان عادی (NLUs)، بهروزرسانیهای مکان دورهای (PLUs) پیشنهاد کردند. به روز رسانی منطقه مسیریابی (RAUs) و به روز رسانی منطقه ردیابی (TAU). این مطالعات نشان داد که دقت بالاتری در برآورد اطلاعات ترافیک با استفاده از CFVD برای بزرگراه ها انجام شد [ 10 ، 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ، 18 ، 19 ، 20 ، 21 ، 22 .23 ، 24 ، 25 ، 26 ، 27 ]. با این حال، این مطالعات فرض میکردند که وسایل نقلیه میتوانند تا مسیر صحیح ردیابی شوند، اما تعیین مسیر صحیح رانندگی شده توسط کاربر ایستگاه سیار (MS) دشوار است و بهویژه برای جادههای شهری بررسی نشده است.
بنابراین، این مطالعه یک روش موقعیتیابی وسیله نقلیه را برای گرفتن CFVD و ردیابی MS برای ITS پیشنهاد میکند. سه ویژگی CFVD، که شامل شناسهها، توالی و زمان ماندگاری سلولهای متصل از سیگنالهای ارتباطات MS است، استخراج و تحلیل میشوند. ویژگی توالی را می توان برای قضاوت جهت جاده شهری مورد استفاده قرار داد، و ویژگی زمان سکونت سلولی را می توان برای تمایز جاده های شهری نزدیک به کار برد. علاوه بر این، این مطالعه یک روش تخمین سرعت وسیله نقلیه را برای تجزیه و تحلیل این سه ویژگی CFVD (به عنوان مثال، شناسهها، توالی، و زمان ماندن سلول سلولهای متصل) برای به دست آوردن سرعت تخمینی خودرو در زمان واقعی پیشنهاد میکند.
بقیه این مطالعه به شرح زیر سازماندهی شده است: بررسی ادبیات معماری شبکه سلولی، CFVD، و برآورد اطلاعات ترافیک در بخش 2 ارائه شده است . بخش 3 روشی برای تعیین موقعیت خودرو بر اساس CFVD برای تجزیه و تحلیل سیگنال های تلفن همراه در خودرویی که در جاده های شهری رانده می شود، پیشنهاد می کند. یک روش تخمین سرعت برای اندازهگیری سرعت تلفن همراه در خودرو بر اساس CFVD در بخش 4 پیشنهاد شده است . نتایج و بحث های تجربی در بخش 5 نشان داده شده است . و بخش 6 نتیجه گیری می کند و کار آینده را مورد بحث قرار می دهد.
2. پیشینه تحقیق و کارهای مرتبط
در این قسمت سه زیربخش که شامل شبکه های سلولی، CFVD و تخمین اطلاعات ترافیک می باشد برای تخمین اطلاعات ترافیک بر اساس CFVD مورد بحث قرار می گیرد.
2.1. شبکه های تلفن همراه
این بخش سیگنالها و رابطهای شبکههای سلولی را توصیف میکند که شامل سیستم جهانی ارتباطات سیار (GSM)، سرویس رادیویی بسته عمومی (GPRS)، سیستم جهانی مخابرات سیار (UMTS) و تکامل بلند مدت (LTE) میشود. برای شبکه های سوئیچینگ مدار، MS ها می توانند سیگنال های HO، CA، NLU و PLU را از طریق رابط A در GSM و از طریق رابط IuCS در UMTS انجام دهند. برای شبکه های سوئیچینگ بسته، MS ها می توانند سیگنال های RAU را از طریق رابط Gb در GPRS و از طریق رابط IuPS در UMTS بدست آورند و سیگنال های TAU را می توان بین MS و شبکه اصلی از طریق رابط S1-MME ارسال کرد. در LTE [ 10 , 11 , 12 , 13 , 14 , 15, 16 , 17 , 18 , 19 , 20 , 21 , 22 , 23 , 24 , 25 , 26 , 27 ]. بنابراین، یک سیستم مانیتور شبکه می تواند برای گرفتن سیگنال های شبکه سلولی از طریق رابط A، رابط IuCS، رابط Gb، رابط IuPS و رابط S1-MME برای CFVD پیاده سازی شود.
2.2. CFVD
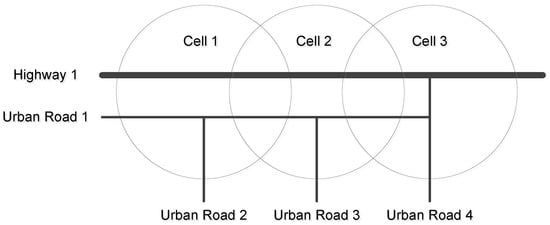
در سالهای اخیر، CFVD برای تخمین جریان ترافیک، تراکم ترافیک و سرعت خودرو در برخی از مطالعات مورد تجزیه و تحلیل قرار گرفته است. برای مثال، سیگنالهای HO از GSM و UMTS میتوانند برای تجزیه و تحلیل زمان ماندن سلول در سلولها و تخمین سرعت خودرو و زمان سفر استفاده شوند [ 8 ، 11 ، 12 ، 16 ، 25 ، 26 ، 28 ]. شکل 1مطالعه موردی CFVD را برای بزرگراه ها و جاده های شهری نشان می دهد. یک بزرگراه (یعنی بزرگراه 1) و چهار جاده شهری (یعنی جاده شهری 1، جاده شهری 2، جاده شهری 3 و جاده شهری 4) توسط سه سلول (یعنی سلول 1، سلول 2 و سلول 3) پوشیده شده است. . هنگامی که یک MS تماسی را انجام می دهد و از سلول 1 به سلول 2 می رود، یک سیگنال HO تولید و ضبط می شود. علاوه بر این، MS از سلول 2 به سلول 3 حرکت می کند، سیگنال HO دیگری نیز تولید و ضبط می شود. این دو سیگنال HO را می توان برای به دست آوردن زمان ماندن سلول سلول 2 تجزیه و تحلیل کرد. سپس سرعت وسیله نقلیه و زمان سفر بزرگراه 1 را می توان مطابق با زمان ماندن سلول تخمین زد [ 8 ، 11 ، 12 ، 16 ، 25 ، 26 ، 28 ].
اگرچه مطالعات قبلی دقت بالایی را در برآورد اطلاعات ترافیک ارائه میکردند، اما آنها بر بزرگراهها تمرکز داشتند و فرض میکردند که وسایل نقلیه میتوانند در مسیر صحیح ردیابی شوند. در محیط های عملی، یک سلول معمولاً تنها یک بزرگراه را پوشش می دهد و یک سلول ممکن است چندین جاده شهری را پوشش دهد. به عنوان مثال، سلول 1 بزرگراه 1، جاده شهری 1، و جاده شهری 2 را پوشش می دهد. بنابراین، تعیین مسیر صحیح رانندگی شده توسط کاربر MS، به ویژه برای جاده های شهری دشوار است.
برخی از مطالعات یک روش طبقه بندی مسیر را بر اساس الگوهای تحرک وسیله نقلیه پیشنهاد کردند [ 12 ، 29 ، 30 ]. روش طبقهبندی مسیر، فهرست سلولهایی را که یک جاده را پوشش میدادند، ثبت کرد. به عنوان مثال، لیست سلول های جاده شهری 1 در شکل 1 ، {Cell 1, Cell 2, Cell 3} است. این روش میتواند شباهت فهرست سلولی یک مسیر و فهرست سلولهای متصل یک MS را برای تعیین مسیری که توسط کاربر MS هدایت میشود تخمین بزند [ 12 ، 29 ، 30 ]. با این حال، روش قبلی نمی تواند جهت جاده را تعیین کند، و جاده های شهری نزدیک ممکن است به دقت پایین طبقه بندی مسیر منجر شود.
2.3. برآورد اطلاعات ترافیک
برای تخمین اطلاعات ترافیک، مقدار HO و NLU را می توان برای تخمین جریان ترافیک جمع آوری و تجزیه و تحلیل کرد [ 8 ، 10 ، 14 ، 17 ]، و مقدار CA و PLU را می توان بازیابی کرد و برای تخمین تراکم ترافیک استفاده کرد [ 8 ، 10] , 14 , 15 ]. سپس سرعت وسیله نقلیه را می توان مطابق با جریان ترافیک تخمینی و تراکم ترافیک تخمین زده شده تخمین زد. علاوه بر این، برخی از مطالعات روشهای موقعیتیابی متحرک را برای اندازهگیری و تجزیه و تحلیل RSSI بین MS و ایستگاههای پایه (BSs) برای تعیین مکان MS پیشنهاد کردند [ 20 ، 21 ، 22 ،23 ]. برای تخمین سرعت خودرو و تخمین زمان سفر می توان تفاوت زمانی و فاصله بین دو مکان یک MS را اندازه گیری کرد. تخمین CFVD مبتنی بر اطلاعات ترافیکی را می توان برای توسعه استراتژی های کنترل ترافیک برای دولت ها ارجاع و تجزیه و تحلیل کرد.
3. روش مکان یابی خودرو
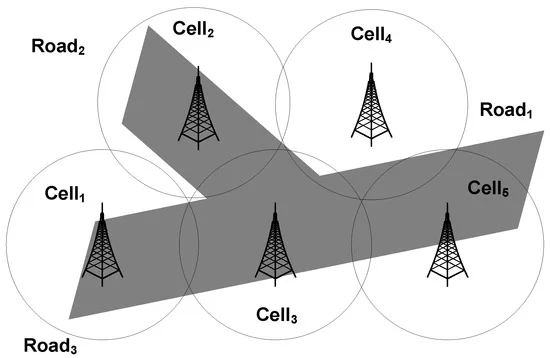
یک روش موقعیتیابی وسیله نقلیه برای جمعآوری و تجزیه و تحلیل CFVD (به عنوان مثال، شناسهها، توالی و زمان ماندگاری سلولهای متصل) از سیگنالهای ارتباطات MS (به عنوان مثال، ورود تماسها و ارسالها) برای تعیین بخشهای جاده شهری که توسط آن هدایت میشوند، پیشنهاد شده است. کاربران ام اس در خودروهای خود به عنوان مثال، شکل 2 یک مطالعه موردی از شبکه جاده شهری و پوشش سلولی را نشان می دهد. پنج سلول (یعنی سلول 1 تا سلول 5 ) و سه بخش جاده شهری (یعنی جاده 1 به جاده 3) وجود دارد.) در این مورد. هنگامی که MS حرکت میکند و سیگنالهای انتقال را انجام میدهد، بخشهای جادهای که توسط کاربر MS در خودروی خود هدایت میشوند را میتوان بر اساس شناسهها، ترتیب و زمان اقامت سلولهای متصل ردیابی کرد. در این مورد، سلول 5 ، سلول 4 ، سلول 3 و سلول 2 ممکن است توسط یک MS متصل شوند زمانی که MS از طریق جاده 1 به جاده 2 حرکت می کند . سلول 5 , سلول 4 , سلول 3 و سلول 1 ممکن است توسط MS متصل شوند زمانی که MS از طریق جاده 1 به جاده 3 حرکت می کند .
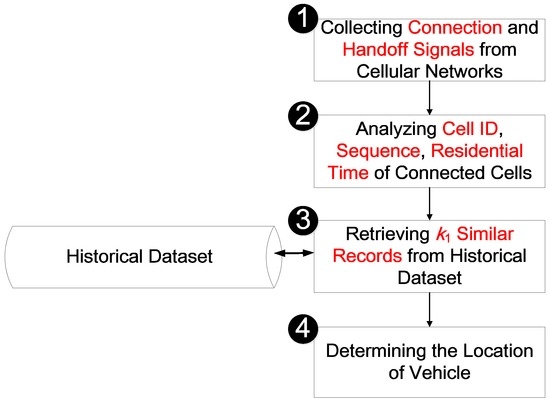
بنابراین، روش تعیین موقعیت وسیله نقلیه پیشنهادی برای تجزیه و تحلیل CFVD و اعمال الگوریتم k- نزدیکترین همسایه (kNN) برای تعیین مکان وسیله نقلیه طراحی شده است. این روش شامل چهار مرحله (نشان داده شده در شکل 3 ) است که عبارتند از: (1) جمع آوری سیگنال های اتصال و انتقال از شبکه های سلولی. (2) تجزیه و تحلیل شناسه سلول، توالی و زمان ماندن سلول سلول های متصل. (3) بازیابی k 1 رکوردهای مشابه از یک مجموعه داده تاریخی. و (4) تعیین محل وسیله نقلیه. جزئیات هر مرحله در زیر بخش های زیر ارائه شده است.
3.1. جمع آوری سیگنال های اتصال و خروج از شبکه های سلولی
مرحله 1 شناسههای سلولی و مُهرهای زمانی را از سیگنالهای شبکه سلولی (به عنوان مثال، ورود تماسها و ارسالها) که توسط شبکههای MS و اصلی از طریق رابطهای A و IuCS بهدست میآیند، جمعآوری و جمعآوری میکند. این مطالعه از یک هویت مشترک بینالمللی تلفن همراه (IMSI) به عنوان شناسه MS برای ردیابی هر MS استفاده میکند. به عنوان مثال، تماسی توسط IMSI 1 در ساعت 16:08:02 در 18 مه 2016 انجام شد و سیگنال های شبکه تلفن همراه در طول این تماس جمع آوری و در جدول 1 نشان داده شد . هنگامی که این MS از سلول 1 به سلول 2 منتقل شد ، یک روش انتقال در ساعت 16:10:35 بعد از ظهر انجام شد. با این حال، نوسان سلول ممکن است بین 16:10:35 و 16:11:07 رخ دهد. سپس MS به حرکت خود ادامه داد و وارد پوشش سلول 3 شد، و یک سیگنال انتقال در ساعت 16:15:58 بعد از ظهر تولید شد. در نهایت یک فراخوان کامل در ساعت 16:18:39 انجام شد. این سیگنالها را میتوان بهعنوان CFVD برای تعیین موقعیت و تخمین سرعت خودرو گرفته و استفاده کرد.
3.2. تجزیه و تحلیل شناسه سلولی، توالی و زمان ماندگاری سلول های متصل
مرحله 2 میتواند سوابق (یعنی شناسههای سلول و مهرهای زمانی) را از مرحله 1 تجزیه و تحلیل کند و سه ویژگی را استخراج کند که شامل شناسههای سلول، توالی و زمان ماندگاری سلولهای متصل است. این مطالعه فرض میکند که n سلول در محیطهای تجربی موجود است. فرآیندهای استخراج هر یک از ویژگی ها در زیر بخش های زیر نشان داده شده است.
3.2.1. شناسه سلولی
برای تجزیه و تحلیل ویژگی شناسه سلول، این مطالعه مقدار سلول i ( ci ) را در صورتی که سلول i در حین تماس متصل باشد ، 1 تعیین می کند، اما در غیر این صورت، مقدار سلول 0 است. ویژگی شناسه سلول، که می تواند ارائه شود. به عنوان یک مدل فضای برداری ( C )، در رابطه (1) تعریف شده است. به عنوان مثال، سلول 1 ، سلول 2 و سلول 3 توسط IMSI 1 در جدول 1 به هم متصل شده اند ، بنابراین مقادیر c 1 ، c 2 و c 3 برابر با 1 هستند (در معادله (2) نشان داده شده است).
سی= {ج1،ج2،ج3،ج4، … ،جn} ، جایی که جمن= {1 ، اگر سلولمن در حین تماس وصل می شود 0 ، در غیر این صورتسی={ج1،ج2،ج3،ج4،…،ج�}،جایی که جمن={1،اگر سلولمن است متصل در حین آ زنگ زدن0،در غیر این صورت
سی= { 1 , 1 , 1 , 0 , … , 0 }سی={1،1،1،0،…،0}
3.2.2. توالی
برای قضاوت جهت جاده شهری، توالی انتقال یک ویژگی مهم است، بنابراین این مطالعه دنباله سلولهای متصل را برای تعیین بخش جاده رانده شده توسط کاربر MS تجزیه و تحلیل میکند. هنگامی که سلول i ابتدا متصل می شود، مقدار سلول i ( o i ) با مقدار وزن بالاتر داده می شود. سپس ویژگی توالی که می تواند به عنوان یک مدل فضای برداری ( O ) ارائه شود در رابطه (3) تعریف می شود. علاوه بر این، این مطالعه فقط اولین x سلول های متصل را در نظر می گیرد، و مجموعه برداری از مقادیر وزن ( A ) برای ویژگی دنباله در معادله (4) تعریف شده است. به عنوان مثال، این مطالعه مقدار x را تعیین کردبه عنوان 3، و معادله (5) برای تنظیم مقادیر A (یعنی a 1 = 1؛ a 2 = 0.5؛ a 3 = 0.25) اتخاذ شده است. در مورد IMSI 1 در جدول 1 ، سلول 1 ابتدا متصل است، بنابراین مقدار سلول 1 ( o 1 ) به صورت 1 (یعنی a 1 ) داده می شود. سپس سلول 2 در مرحله دوم متصل می شود، و مقدار سلول 2 ( o 2 ) به عنوان 0.5 (یعنی a 2 ) اتخاذ می شود. در نهایت، این مطالعه مقدار سلول 3 ( o3 ) به صورت 0.25 (یعنی a 3 ) و مقادیر سایر سلول ها به صورت 0 (نشان داده شده در معادله (6)).
O = {o1،o2،o3،o4، … ،on} ، جایی که oمن=مقدار وزن مربوط به سلول _ من�={�1،�2،�3،�4،…،��}،جایی که �من=را متناظر وزن ارزش از سلولمن
الف = {آ1،آ2، … ،آایکس}آ={آ1،آ2،…،آایکس}
A = { 1 ، 0.5 ، 0.25 }آ={1،0.5،0.25}
O = { 1 ، 0.5 ، 0.25 ، 0 ، … ، 0 }�={1،0.5،0.25،0،…،0}
3.2.3. زمان سکونت سلولی
برای تمایز جادههای شهری نزدیک، زمان اقامت سلولی یک ویژگی مهم است، بنابراین این مطالعه زمان ماند سلولی هر سلول متصل را در طول تماس یکسان تجزیه و تحلیل میکند. با این حال، نوسان سلولی ممکن است به خصوص در یک شهر رخ دهد. بنابراین، کل زمان ماندن سلول هر سلول در نظر گرفته شده و خلاصه می شود. سپس ویژگی زمان ماند سلولی که می تواند به صورت مدل فضای برداری ( T ) ارائه شود، در رابطه (7) تعریف شده است. علاوه بر این، این مطالعه تنها اولین سلولهای y را با زمان ماندگاری سلولی طولانیتر در نظر میگیرد و مجموعه برداری از مقادیر وزنی ( B ) برای ویژگی زمان ماندن سلول در رابطه (8) تعریف شده است. برای مثال، نوسان سلول ممکن است بین ساعت 16:10:35 و 16:11:07 در جدول 1 رخ دهد.. بنابراین، کل زمان ماندن سلول سلول 1 174 ثانیه است (یعنی 174 = 153 + 21)، و کل زمان ماند سلولی سلول 2 302 ثانیه است (یعنی 302 = 11 + 291). سپس، زمان ماندن سلول سلول 3 161 ثانیه است. در این مطالعه، مقدار y به عنوان 3 و از معادله (9) برای تنظیم مقادیر B استفاده می شود (یعنی b 1 = 1؛ b 2 = 0.5؛ b 3 = 0.25). زمان ماندن سلول سلول 2 در مورد جدول 1 طولانی ترین است ، بنابراین مقدار سلول 2 ( t 2 ) برابر 1 است (یعنی b 1)). سپس، مقادیر سلول 3 ( t 3 ) و سلول 1 ( t 1 ) به ترتیب 0.5 (یعنی b 2 ) و 0.25 (یعنی b 3 ) پذیرفته می شوند. در نهایت، این مطالعه مقادیر سایر سلول ها را 0 (نشان داده شده در معادله (10)) قرار می دهد.
تی= {تی1،تی2،تی3،تی4، … ،تیn} ، جایی که oمن=مقدار وزن مربوط به سلول _ منتی={تی1،تی2،تی3،تی4،…،تی�}،جایی که �من=را متناظر وزن ارزش از سلولمن
B = {ب1،ب2، … ،بایکس}ب={ب1،ب2،…،بایکس}
B = { 1 ، 0.5 ، 0.25 }ب={1،0.5،0.25}
تی= { 0.25 ، 1 ، 0.5 ، 0 ، … ، 0 }تی={0.25،1،0.5،0،…،0}
3.2.4. ترکیبی
این مطالعه ویژگیهای ID سلول، توالی و زمان ماندن سلول را به طور همزمان در نظر میگیرد و مدلهای فضای برداری C ، O و T را در مجموعه برداری R (نشان داده شده در معادله (11)) ترکیب میکند. به عنوان مثال، رکوردهای IMSI1 را می توان در معادله (12) مدل کرد:
R = { C، ای ، تی} = {ج1،ج2،ج3،ج4، … ،جn،o1،o2،o3،o4، … ،on،تی1،تی2،تی3،تی4، … ،تیn}آر={سی،�،تی}={ج1،ج2،ج3،ج4،…،ج�،�1،�2،�3،�4،…،��،تی1،تی2،تی3،تی4،…،تی�}
R = { 1 , 1 , 1 , 0 , … , 0 , 1 , 0.5 , 0.25 , 0 , … , 0 , 0.25 , 1 , 0.5 , 0 , … , 0 }آر={1،1،1،0،…،0،1،0.5،0.25،0،…،0،0.25،1،0.5،0،…،0}
3.3. بازیابی k 1 رکوردهای مشابه از مجموعه داده های تاریخی
در این مطالعه، m فراخوانی مطابق با معادله (11) تبدیل شده و در یک پایگاه داده تاریخی ذخیره می شود. این رکوردهای m به عنوان مجموعه داده تاریخی H (نشان داده شده در معادله (13)) تعریف می شوند. علاوه بر این، بخش جاده رانده شده هر رکورد تاریخی در پایگاه داده برچسب گذاری شده است. هنگامی که یک فراخوانی جدید انجام و تکمیل می شود، مجموعه برداری از این فراخوانی ( r ) (نشان داده شده در معادله (14)) مطابق با معادله (11) تبدیل شده و با هر رکورد در مجموعه داده های تاریخی H توسط معادله (15) مقایسه می شود. سپس مشابه ترین رکورد تاریخی با فاصله g 1 مطابق با رابطه (16) قابل بازیابی است و مرحله 3 k 1 را بازیابی می کند.سوابق مشابه از مجموعه داده های تاریخی برای موقعیت یابی خودرو.
اچ= {ساعت1،ساعت2، … ،ساعتمتر} جایی که ساعتمن= {سیمن،Oمن،تیمن} = {جمن ، 1،جمن ، 2،جمن ، 3،جمن ، 4، … ،جمن ، n،oمن ، 1،oمن ، 2،oمن ، 3،oمن ، 4، … ،oمن ، n،تیمن ، 1،تیمن ، 2،تیمن ، 3،تیمن ، 4، … ،تیمن ، n}اچ={ساعت1،ساعت2،…،ساعتمتر} جایی که ساعتمن={سیمن،�من،تیمن} ={جمن،1،جمن،2،جمن،3،جمن،4،…،جمن،�،�من،1،�من،2،�من،3،�من،4،…،�من،�،تیمن،1،تیمن،2،تیمن،3،تیمن،4،…،تیمن،�}
r = { C، ای ، تی} = {ج1،ج2،ج3،ج4، … ،جn،o1،o2،o3،o4، … ،on،تی1،تی2،تی3،تی4، … ،تیn}�={سی،�،تی}={ج1،ج2،ج3،ج4،…،ج�،�1،�2،�3،�4،…،��،تی1،تی2،تی3،تی4،…،تی�}
د( ر ،ساعتمن) =⎡⎣⎢⎢[ج1–جمن ، 1⋯جn–جمن ، n]⎡⎣⎢⎢ج1–جمن ، 1⋮جn–جمن ، n⎤⎦⎥⎥[o1–oمن ، 1⋯on–oمن ، n]⎡⎣⎢⎢o1–oمن ، 1⋮on–oمن ، n⎤⎦⎥⎥[تی1–تیمن ، 1⋯جn–جمن ، n]⎡⎣⎢⎢تی1–تیمن ، 1⋮تیn–تیمن ، n⎤⎦⎥⎥⎤⎦⎥⎥⎡⎣⎢111⎤⎦⎥–––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––––⎷ =∑j = 1n(جj–جمن ، ج)2+(oj–oمن ، ج)2+(تیj–تیمن ، ج)2–––––––––––––––––––––––––––––––⎷د(�،ساعتمن) =[[ج1–جمن،1⋯ج�–جمن،�][ج1–جمن،1⋮ج�–جمن،�][�1–�من،1⋯��–�من،�][�1–�من،1⋮��–�من،�][تی1–تیمن،1⋯ج�–جمن،�][تی1–تیمن،1⋮تی�–تیمن،�]][111] =∑�=1�(ج�–جمن،�)2+(��–�من،�)2+(تی�–تیمن،�)2
g1=دقیقه1 ≤ i ≤ mد( ر ،ساعتمن)�1=دقیقه1≤من≤مترد(�،ساعتمن)
3.4. تعیین مکان وسیله نقلیه
برای تعیین مکان وسیله نقلیه، مرحله 4 یک قانون اکثریت را برای تجزیه و تحلیل رکوردهای مشابه k 1 اعمال می کند، که شامل بخش جاده رانده مربوطه از مرحله 3 است. به عنوان مثال، یک مطالعه موردی از مجموعه داده های تاریخی و یک رکورد جدید در جدول آورده شده است. 2 . پنج خانه (یعنی n = 5) و شش رکورد تاریخی (یعنی m = 6) وجود دارد و مقدار k 1 در این مورد به عنوان 3 اتخاذ می شود. از معادله (15) برای محاسبه فاصله بین مجموعه داده r (یعنی یک رکورد جدید) و هر رکورد تاریخی استفاده می شود. نتیجه نشان می دهد که رکوردهای مشابه k 1 h 1 هستند ،h 2 و h 4 ، بنابراین جاده 1 توسط دو رکورد پشتیبانی می شود (یعنی h 1 و h 2 ). بنابراین، بخش جاده رانده شده این رکورد جدید به عنوان جاده 1 تعیین می شود .
4. روش تخمین سرعت
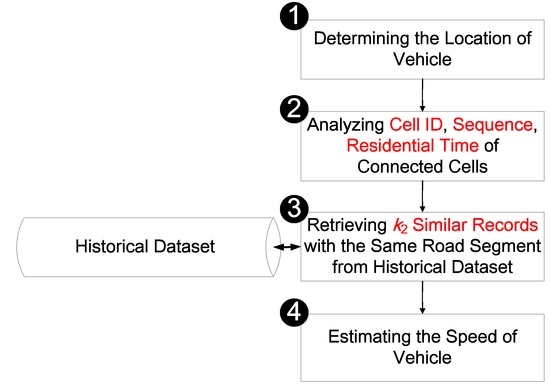
این مطالعه روشی را پیشنهاد میکند و الگوریتم k- نزدیکترین همسایه را برای استخراج ویژگیهای CFVD (به عنوان مثال، شناسهها، توالی و زمان ماندن سلول سلولهای متصل) و برای تخمین سرعت خودرو اعمال میکند. روش پیشنهادی شامل چهار مرحله (نشان داده شده در شکل 4 ) است که شامل: (1) تعیین مکان وسیله نقلیه. (2) تجزیه و تحلیل شناسه سلول، توالی و زمان ماندن سلول سلول های متصل. (3) بازیابی k 2 رکورد مشابه با همان بخش جاده از مجموعه داده های تاریخی. و (4) تخمین سرعت وسیله نقلیه. جزئیات هر مرحله در زیر بخش های زیر ارائه شده است.
4.1. تعیین مکان وسیله نقلیه
مرحله 1 بخش جاده رانده شده MS را مطابق با CFVD و روش تعیین موقعیت وسیله نقلیه پیشنهادی در بخش 3 تعیین می کند . این مطالعه فقط سوابق تاریخی با همان بخش جاده را برای تخمین سرعت خودرو در نظر گرفته و تجزیه و تحلیل می کند. به عنوان مثال، هنگامی که یک رکورد جدید به عنوان جاده l تعیین می شود ، سوابق تاریخی با جاده l در مراحل زیر در نظر گرفته می شود.
4.2. تجزیه و تحلیل شناسه سلولی، توالی و زمان ماندگاری سلول های متصل
مرحله 2 معادلات (1)، (3) و (7) را برای استخراج ویژگیهای رکوردهای تاریخی و رکوردهای جدید که شامل شناسهها، توالی و زمان ماندن سلول سلولهای متصل میشود، اتخاذ میکند. هر رکورد را می توان به عنوان یک مدل فضای برداری تبدیل کرد (نشان داده شده در معادله (11)). رکوردهای تاریخی به عنوان یک مجموعه برداری H ارائه می شوند و یک رکورد جدید به عنوان مجموعه برداری r مطابق با معادلات (13) و (14) ارائه می شود.
4.3. بازیابی k 2 رکورد مشابه با همان جاده از مجموعه داده های تاریخی
مرحله 3 ، k 2 رکوردهای مشابه را با همان بخش جاده از مجموعه داده های تاریخی مطابق با معادله (15) بازیابی می کند. علاوه بر این، سرعت وسیله نقلیه هر رکورد تاریخی در یک پایگاه داده برچسب گذاری شده است. به عنوان مثال، در مورد جدول 2 ، رکورد جدید r به عنوان جاده 1 تعیین می شود ، بنابراین سه رکورد تاریخی (یعنی h 1 ، h 2 ، و h 3 ) برای تخمین سرعت خودرو در نظر گرفته می شود. اگر مقدار k 2 در این مورد به عنوان 2 اتخاذ شود، رکوردهای h 1 و h 2به عنوان رکوردهای مشابه k 2 بازیابی می شوند .
4.4. تخمین سرعت یک وسیله نقلیه
مرحله 4 از یک روش میانگین وزنی برای تجزیه و تحلیل رکوردهای مشابه k 2 برای تخمین سرعت خودرو استفاده می کند. در این مطالعه، رکورد جدید r به عنوان جاده l تعیین می شود و فاصله بین این رکورد و رکورد مشابه تر با سرعت خودرو v 1 به صورت p 1 در معادله (17) تعریف شده است . علاوه بر این، فاصله بین این رکورد و j- امین رکورد مشابه با سرعت خودرو v j به صورت p j تعریف می شود . سپس سرعت وسیله نقلیه این رکورد با معادله (18) برابر u تخمین زده می شود . به عنوان مثال، k 2رکوردهای مشابه h 1 و h 2 در جدول 2 هستند زمانی که مقدار k 2 2 است. مقدار d ( r , h 1 ) 0 است (یعنی p 1 = 0) و مقدار d ( r , h 2 ) حدود 0.707 است (یعنی p 2 = 0). سپس، معادله (18) برای تخمین سرعت خودروی رکورد جدید r به عنوان 60 کیلومتر در ساعت (در معادله (19) نشان داده شده است) اتخاذ می شود.
پ1= دقیقه د( ر ،ساعتمن) که در آن بخش جاده رانده شده از ساعتمن جاده است لپ1=دقیقهد(�،ساعتمن) جایی که را رانده جاده بخش از ساعتمن است جادهل
u =[پک2–پ1پک2–پ1پک2–پ2پک2–پ1⋯پک2–پک2پک2–پ1]⎡⎣⎢⎢⎢⎢⎢⎢v1v2⋮vک2⎤⎦⎥⎥⎥⎥⎥⎥[پک2–پ1پک2–پ1پک2–پ2پک2–پ1⋯پک2–پک2پک2–پ1]⎡⎣⎢⎢⎢⎢⎢⎢11⋮1⎤⎦⎥⎥⎥⎥⎥⎥=[ω1ω2⋯ωک2]⎡⎣⎢⎢⎢⎢⎢⎢v1v2⋮vک2⎤⎦⎥⎥⎥⎥⎥⎥[ω1ω2⋯ωک2]⎡⎣⎢⎢⎢⎢⎢⎢11⋮1⎤⎦⎥⎥⎥⎥⎥⎥ جایی که ωمن=پک2–پمنپک2–پ1=∑i = 1ک2(ωمن×vمن)∑i = 1ک2ωمن جایی که ωمن=پک2–پمنپک2–پ1تو=[پک2–پ1پک2–پ1پک2–پ2پک2–پ1⋯پک2–پک2پک2–پ1][�1�2⋮�ک2][پک2–پ1پک2–پ1پک2–پ2پک2–پ1⋯پک2–پک2پک2–پ1][11⋮1]=[�1�2⋯�ک2][�1�2⋮�ک2][�1�2⋯�ک2][11⋮1] جایی که �من=پک2–پمنپک2–پ1=∑من=1ک2(�من×�من)∑من=1ک2�من جایی که �من=پک2–پمنپک2–پ1
تو=ω1× 60 +ω2× 58ω1+ω2 جایی که ω1=0.707 – 00.707 – 0= 1 و ωمن=0.707 – 0.7070.707 – 0= 0= 60تو=�1×60+�2×58�1+�2 جایی که �1=0.707–00.707–0=1 و �من=0.707–0.7070.707–0=0=60
5. نتایج تجربی و بحث
مجموعه CFVD و اطلاعات شبکه های جاده های شهری در بخش 5.1 ارائه شده است . CFVD جمع آوری شده برای ارزیابی روش تعیین موقعیت وسیله نقلیه پیشنهادی و روش تخمین سرعت به ترتیب در بخش 5.2 و بخش 5.3 استفاده می شود .
5.1. محیط تجربی
در محیط های آزمایشی، یک MS (به عنوان مثال، HTC (Taoyuan، تایوان) M8 دارای پلتفرم Android 2.2.2) برای انجام مراحل تماس زمانی که ماشین در جاده های شهری رانده می شود، در ماشین حمل می شود، و سیگنال های شبکه سلولی این تماس ها می توانند برای مجموعه CFVD گرفته شود. شش بخش جاده شهری در Kaohsiung و Pingtung در تایوان (نشان داده شده در شکل 5 ) در 27 مسیر حرکت می کنند. 64 ایستگاه پایه مختلف (BSs) (یعنی n = 64) در این بخش های جاده در تایوان شناسایی شده است.
برای ارزیابی روش موقعیتیابی خودرو و روش تخمین سرعت، برخی از روشهای یادگیری ماشین محبوب (مانند kNN، طبقهبندی ساده بیز (NB)، درخت تصمیم (DT)، ماشین بردار پشتیبان (SVM) و شبکه عصبی پس انتشار ( BPNN) [ 31 ، 32 ])، با استفاده از زبان R [ 33 ، 34 ] و Rstudio [ 35 ] برای تجزیه و تحلیل CFVD جمعآوریشده در آزمایشها پیادهسازی و مقایسه میشوند. این مطالعه از بسته های کلاس [ 36 ]، e1071 [ 37 ]، حزب [ 38 ] و شبکه عصبی [ 39 ] به ترتیب برای پیاده سازی الگوریتم های kNN، NB، DT، SVM و BPNN استفاده می کند. علاوه بر این، روش اعتبار سنجی متقاطع k برابر [31 ، 32 ] برای تجزیه و تحلیل هر آزمایش استفاده می شود. در تکرار i ، دادههای اجرای i به عنوان مجموعه آزمایشی انتخاب میشوند، و سایر آزمایشها مجموعاً به عنوان دادههای آموزشی برای تجزیه و تحلیل عملکرد استفاده میشوند.
5.2. ارزیابی روش مکان یابی خودرو
برای ارزیابی روش موقعیتیابی خودرو، این مطالعه ویژگیهای مختلف و روشهای یادگیری ماشین را برای تجزیه و تحلیل CFVD در نظر میگیرد. ابتدا شناسه سلول و kNN را در نظر بگیرید. می توان مشاهده کرد که عملکرد آن در موقعیت یابی خودرو 51.85٪ است (نشان داده شده در جدول 3). زمانی که تنها ویژگی شناسه سلولی در نظر گرفته می شود، علت چندین خطا، قضاوت نادرست جهت است. سپس ویژگیهای شناسه سلولی و توالی برای قضاوت جهت جاده شهری در نظر گرفته میشود و نتایج نشان میدهد که دقت روش مکانیابی خودرو به 92.59 درصد افزایش یافته است. با این حال، برخی از جادههای شهری نزدیک را نمیتوان با استفاده از ویژگیهای شناسه سلولی و توالی تفکیک کرد. در نهایت، این مطالعه تمام ویژگیها (یعنی شناسهها، توالی و زمان ماندگاری سلولهای متصل) را برای تعیین بخش جاده هدایتشده کاربر MS تجزیه و تحلیل میکند و دقت را میتوان تا 100 درصد بهبود بخشید. بنابراین، ویژگی زمان اقامت سلولی می تواند از تبعیض جاده های شهری نزدیک حمایت کند.
برای مقایسه روشهای مختلف یادگیری ماشین، همه ویژگیها در نظر گرفته شده و تجزیه و تحلیل میشوند تا بخش جاده رانده شده تعیین شود. چهار عامل، که شامل دقت، یادآوری، اندازه گیری F 1 – (نشان داده شده در معادله (20))، و دقت برای ارزیابی عملکرد هر روش استفاده می شود. جدول 4 نشان می دهد که عملکرد روش پیشنهادی بالاتر از روش های دیگر است.
اف1− اندازه گیری =21دقت، درستی+1به خاطر آوردناف1–اندازه گرفتن=21دقت، درستی+1به خاطر آوردن
برای مقایسه پارامترهای مختلف، این مطالعه پنج مورد را طراحی میکند که شامل {1، 0، 0}، {1، 0.5، 0}، {1، 1، 1}، {1، 0.67، 0.33} و {1، 0.5 ، 0.25} برای مقادیر A و B. علاوه بر این، فاصله اقلیدسی، فاصله مینکوفسکی و فاصله ماهالانوبیس برای روش پیشنهادی در نظر گرفته شده است. نتایج تجربی این موارد (در جدول 5 ) نشان میدهد که پارامترهای A و B را میتوان به صورت {1، 0.5، 0.25} تطبیق داد تا دقت بیشتری در موقعیتیابی خودرو به دست آید.
5.3. ارزیابی روش تخمین سرعت
برای ارزیابی روش تخمین سرعت، این مطالعه ویژگیهای مختلفی را پس از تعیین بخش جاده رانده کاربر MS در نظر میگیرد. جدول 6 نتایج روش تخمین سرعت پیشنهادی را با ویژگی های مختلف نشان می دهد. این نتایج تجربی نشان میدهد که زمان ماندن سلول مهمترین ویژگی است و دقت تخمین وسیله نقلیه با همه ویژگیها را میتوان تا ۸۱/۸۳ درصد ارتقا داد. بنابراین، روش پیشنهادی مبتنی بر CFVD برای تشخیص وضعیت ترافیک جاده های شهری مناسب است.
6. نتیجه گیری و کار آینده
چندین مطالعه از CFVD بر برآورد اطلاعات ترافیک برای آزادراه ها متمرکز شده است. علاوه بر این، این مطالعات فرض کردند که سیگنال های شبکه سلولی از MS های متحرک در جاده ها می توانند فیلتر شوند. با این حال، یک سلول ممکن است چندین بخش جاده ای از جاده های شهری را پوشش دهد، بنابراین ممکن است این فرض در جاده های شهری محقق نشود.
بنابراین، این مطالعه روشهای تعیین موقعیت و تخمین سرعت خودرو را برای گرفتن CFVD و ردیابی MS برای سیستمهای حمل و نقل هوشمند پیشنهاد میکند. سه ویژگی CFVD، که شامل شناسهها، توالی و زمان ماندگاری سلولهای متصل از سیگنالهای ارتباطات MS است، استخراج و تحلیل میشوند. ویژگی توالی را می توان برای قضاوت در جهت جاده شهری مورد استفاده قرار داد، و ویژگی زمان اقامت سلولی را می توان برای تمایز جاده های شهری نزدیک به کار برد. نتایج آزمایش نشان میدهد که دقت روش تعیین موقعیت وسیله نقلیه پیشنهادی بهتر از سایر روشهای رایج یادگیری ماشین (به عنوان مثال، NB، DT، SVM، و BPNN) است. علاوه بر این، دقت روش پیشنهادی با تمام ویژگیها (یعنی شناسهها، توالی و زمان ماندگاری سلولهای متصل) برای تخمین سرعت 81/83 درصد است.
با این حال، مشکلات نوسان سلول ممکن است زمان ماند سلولی هر سلول و تخمین سرعت خودرو را مختل کند. این مطالعه کل زمان اقامت سلولی هر سلول را برای حل این مشکلات خلاصه می کند، اما این مشکلات ممکن است مطابق با برخی از عوامل محیطی رخ دهند. بنابراین، عوامل محیطی ممکن است برای فیلتر کردن نوسان سلولی در کارهای آینده تجزیه و تحلیل شوند.
منابع
- جانگ، جی. Byun, S. ارزیابی دقت داده های ترافیکی با استفاده از بستر آزمایشی آشکارساز کره. IET Intel. ترانسپ سیستم 2011 ، 5 ، 286-293. [ Google Scholar ] [ CrossRef ]
- رمضانی، ع. مشیری، ب. کیان، ع. اعرابی، BN; عبدالهای، ب. تخمین حداکثر احتمال توزیع شده برای پیشبینی چگالی جریان و سرعت در آشکارسازهای ترافیک توزیع شده با فرض مدل مخلوط گاوسی. IET Intel. ترانسپ سیستم 2012 ، 6 ، 215-222. [ Google Scholar ] [ CrossRef ]
- میدلتون، دی. پارکر، R. ارزیابی آشکارساز خودرو . گزارش شماره FHWA/TX-03 /2119-1; موسسه حمل و نقل تگزاس، اداره حمل و نقل تگزاس: آستین، تگزاس، ایالات متحده آمریکا، 2002.
- چن، WJ; چن، CH; لین، BY; Lo, CC یک سیستم پیشبینی اطلاعات ترافیک بر اساس گزارشدهی خودروی کاوشگر مجهز به سیستم موقعیت جهانی. Adv. علمی Lett. 2012 ، 16 ، 117-124. [ Google Scholar ] [ CrossRef ]
- هانتر، تی. شاه ماهی، آر. آببل، پ. باین، A. استنتاج مسیر و زمان سفر از دادههای خودروی کاوشگر GPS. در مجموعه مقالات کنفرانس بنیاد پردازش اطلاعات عصبی، ونکوور، BC، کانادا، 5-10 دسامبر 2009.
- Cheu، RL; زی، سی. لی، جمعیت خودرو پروب DH و اندازه نمونه برای تخمین سرعت شریانی. محاسبه کنید. کمک به زیرساخت های عمرانی مهندس 2002 ، 17 ، 53-60. [ Google Scholar ] [ CrossRef ]
- هررا، جی سی. کار، DB; شاه ماهی، آر. Ban، XJ; جاکوبوزون، کیو. Bayen، AM ارزیابی داده های ترافیکی به دست آمده از طریق تلفن های همراه مجهز به GPS: آزمایش میدانی قرن موبایل. ترانسپ Res. قسمت C Emerg. تکنولوژی 2010 ، 18 ، 568-583. [ Google Scholar ] [ CrossRef ]
- کاسرس، ن. وایدبرگ، جی پی؛ بنیتز، FG بررسی برآورد داده های ترافیک استخراج شده از شبکه های سلولی. IET Intel. ترانسپ سیستم 2008 ، 2 ، 179-192. [ Google Scholar ] [ CrossRef ]
- تحقیقات بازاریابی متحد. گزارش تحقیق در مورد فرصت دیجیتال در مورد کاربران تلفن. کمیسیون تحقیق، توسعه و ارزیابی، یوان اجرایی، 2011. موجود به صورت آنلاین: http://www.rdec.gov.tw/public/Attachment/213014313671.pdf (در 20 ژوئن 2016 قابل دسترسی است). [ Google Scholar ]
- لای، WK; کو، تی. Chen, CH تخمین سرعت خودرو و روشهای پیشبینی بر اساس دادههای وسیله نقلیه شناور سلولی. Appl. علمی 2016 ، 6 ، 47. [ Google Scholar ] [ CrossRef ]
- وو، CI; چن، CH; لین، BY; Lo, CC روشهای برآورد اطلاعات ترافیک از رویدادهای تحویل. J. تست. ارزشیابی 2016 ، 44 ، 656-664. [ Google Scholar ] [ CrossRef ]
- چانگ، ام.اف. چن، CH; لین، YB؛ Chia، CY فراوانی گزارش سرعت CFVD برای ترافیک بزرگراه. سیم. اشتراک. اوباش محاسبه کنید. 2015 ، 15 ، 879-888. [ Google Scholar ] [ CrossRef ]
- Janecek، A. والریو، دی. هومل، کالیفرنیا؛ ریچیاتو، اف. Hlavacs, H. شبکه سلولی به عنوان یک حسگر: از داده های تلفن همراه تا نظارت بر ترافیک جاده ای در زمان واقعی. IEEE Trans. هوشمند ترانسپ سیستم 2015 ، 16 ، 2551-2572. [ Google Scholar ] [ CrossRef ]
- چن، CH; چانگ، HC; سو، سی. Lo, CC; تخمین سرعت ترافیک Lin، HF بر اساس بهروزرسانیهای موقعیت مکانی عادی و تماسهای ورودی از شبکههای تلفن همراه. شبیه سازی مدل. تمرین کنید. نظریه 2013 ، 35 ، 26-33. [ Google Scholar ] [ CrossRef ]
- چانگ، HC; چن، CH; لین، BY; کونگ، هی. Lo, CC تخمین اطلاعات ترافیک با استفاده از رویدادهای بهروزرسانی دورهای مکان. بین المللی J. Innov. محاسبه کنید. Inf. کنترل 2013 ، 9 ، 2031-2041. [ Google Scholar ]
- Maerivoet، S. Logghe, S. اعتبار سنجی زمان سفر بر اساس داده های وسیله نقلیه شناور سلولی. در مجموعه مقالات ششمین کنگره و نمایشگاه اروپا در سیستم های حمل و نقل و خدمات هوشمند، آلبورگ، دانمارک، 18 تا 20 ژوئن 2007.
- کاسرس، ن. رومرو، LM؛ بنیتز، FG; مدلهای برآورد جریان ترافیک del Castillo، JM با استفاده از دادههای تلفن همراه. IET Intel. ترانسپ سیستم 2012 ، 13 ، 1430-1441. [ Google Scholar ] [ CrossRef ]
- والریو، دی. ویتک، تی. ریچیاتو، اف. پیلز، آر. Wiedermann، W. برآورد ترافیک جاده ای از پایش شبکه سلولی: یک تحقیق عملی. در مجموعه مقالات بیستمین سمپوزیوم بین المللی IEEE در مورد ارتباطات رادیویی شخصی، داخلی و سیار، توکیو، ژاپن، 13 تا 16 سپتامبر 2009.
- والریو، دی. D’Alconzo، A. ریچیاتو، اف. Wiedermann, W. بهرهبرداری از شبکههای سلولی برای تخمین ترافیک جادهای: یک بررسی و یک نقشه راه تحقیقاتی. در مجموعه مقالات شصت و نهمین کنفرانس فناوری وسایل نقلیه IEEE، بارسلون، اسپانیا، 26-29 آوریل 2009.
- چن، CH; Lo, CC; Lin, HF تجزیه و تحلیل نرخ گزارش سرعت از یک شبکه سلولی بر اساس الگوریتم تعیین موقعیت اثر انگشت. اس افر. J. Ind. Eng. 2013 ، 24 ، 98-106. [ Google Scholar ] [ CrossRef ]
- چن، CH; لین، BY; چانگ، HC; Lo, CC الگوریتم موقعیت یابی جدید مبتنی بر محاسبات ابری – مطالعه موردی سیستم های حمل و نقل هوشمند. Inf. بین المللی بین رشته ای. J. 2012 , 15 , 4519-4524. [ Google Scholar ]
- چنگ، دی. چن، CH; Hsiang، CH; Lo, CC; لین، HF; Lin, BY دوره نمونه برداری بهینه از الگوریتم موقعیت یابی اثر انگشت برای تخمین سرعت خودرو. ریاضی. مشکل مهندس 2013 , 2013 . [ Google Scholar ] [ CrossRef ]
- چن، CH; لین، BY; Lin, CH; لیو، YS; Lo, CC یک الگوریتم موقعیت یابی سبز برای سیستم هدایت دانشگاه. بین المللی جی. موب. اشتراک. 2012 ، 10 ، 119-131. [ Google Scholar ] [ CrossRef ]
- گوندلگارد، دی. کارلسون، جی.ام. تلفن هوشمند به عنوان فعال کننده اطلاعات ترافیک جاده ای بر اساس سیگنال دهی شبکه سلولی. در مجموعه مقالات شانزدهمین کنفرانس بین المللی IEEE در مورد سیستم های حمل و نقل هوشمند، لاهه، هلند، 6 تا 9 اکتبر 2013.
- گوندلگارد، دی. دقت مکان کارلسون، JM Handover برای تخمین زمان سفر در GSM و UMTS. IET Intel. ترانسپ سیستم 2009 ، 3 ، 87-94. [ Google Scholar ] [ CrossRef ]
- گوندلگارد، دی. طبقهبندی مسیر کارلسون، JM در تخمین زمان سفر بر اساس سیگنالدهی شبکه سلولی. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE در مورد سیستم های حمل و نقل هوشمند، سنت لوئیس، MO، ایالات متحده، 4 تا 7 اکتبر 2009.
- گوندلگارد، دی. Karlsson، JM تولید اطلاعات ترافیک جاده از شبکه های سلولی – امکانات جدید در UMTS. در مجموعه مقالات ششمین کنفرانس بین المللی ارتباطات راه دور ITS، چنگدو، چین، 21-23 ژوئن 2006.
- Demissie, MG; de Almeida Correia، GH; Bento، C. سیستم تشخیص وضعیت ترافیک جاده ای هوشمند از طریق اطلاعات تحویل شبکه های سلولی: یک مطالعه اکتشافی. ترانسپ Res. قسمت C Emerg. تکنولوژی 2013 ، 32 ، 76-88. [ Google Scholar ] [ CrossRef ]
- فیادینو، پ. والریو، دی. ریچیاتو، اف. Hummel, KA گام هایی به سمت استخراج الگوهای تحرک خودرو از داده های سیگنالینگ 3G. لکت. یادداشت ها محاسبه. علمی 2012 ، 7189 ، 66-80. [ Google Scholar ]
- بکر، RA; کاسرس، آر. هانسون، ک. لوه، جی ام؛ اوربانک، اس. ورشاوسکی، آ. Volinsky، C. طبقه بندی مسیر با استفاده از الگوهای انتقال سلولی. در مجموعه مقالات سیزدهمین کنفرانس بین المللی محاسبات همه جا حاضر، پکن، چین، 17 تا 21 سپتامبر 2011.
- لای، WK; Kuo، TH یک روش تعیین بخش جاده شهری بر اساس داده های وسیله نقلیه شناور سلولی برای ردیابی ایستگاه های سیار. در مجموعه مقالات هفتمین کنفرانس بین المللی IEEE در مورد محاسبات و کارگاه های آموزشی Ubi-Media، اولان باتور، مغولستان، 12 تا 14 ژوئیه 2014.
- هان، جی. کمبر، م. Pei, J. Data Mining: Concepts and Techniques , 3rd ed.; Morgan Kaufmann Publishers: San Francisco, CA, USA, 2011. [ Google Scholar ]
- ایهاکا، ر. Gentleman, R. R: زبانی برای تجزیه و تحلیل داده ها و گرافیک. جی. کامپیوتر. نمودار. آمار 1996 ، 5 ، 299-314. [ Google Scholar ]
- Ripley, BD پروژه R در محاسبات آماری. اتصال MSOR 2001 ، 1 ، 23-25. [ Google Scholar ] [ CrossRef ]
- Racine, JS RStudio: یک IDE مستقل از پلتفرم برای R و Sweave. J. Appl. اقتصاد 2012 ، 27 ، 167-172. [ Google Scholar ] [ CrossRef ]
- ریپلی، بی. Venables, W. Class: Functions for Classification. The Comprehensive R Archive Network 2015. در دسترس آنلاین: https://cran.r-project.org/web/packages/class/index.html (در 20 ژوئن 2016 قابل دسترسی است).
- مایر، دی. دیمیتریادو، ای. هورنیک، ک. وینگسل، آ. لیش، اف. چانگ، سی سی; Lin, CC e1071: توابع Nisc از گروه آمار، گروه نظریه احتمال. The Comprehensive R Archive Network 2015. در دسترس آنلاین: https://cran.r-project.org/web/packages/e1071/index.html (در 20 ژوئن 2016 قابل دسترسی است).
- هاثورن، تی. هورنیک، ک. استروبل، سی. Zeileis، A. Party: A Laboratory for Recursive Partytioning. The Comprehensive R Archive Network 2015. در دسترس آنلاین: https://cran.r-project.org/web/packages/party/index.html (در 20 ژوئن 2016 قابل دسترسی است).
- فریچ، اس. Guenther, F. Neuralnet: آموزش شبکه های عصبی. The Comprehensive R Archive Network 2012. در دسترس آنلاین: https://cran.r-project.org/web/packages/neuralnet/index.html (در 20 ژوئن 2016 قابل دسترسی است).
شکل 1. مطالعه موردی CFVD برای بزرگراه ها و جاده های شهری.

شکل 2. مطالعه موردی شبکه راه شهری و پوشش سلولی.
شکل 3. مراحل روش موقعیت یابی خودرو.
شکل 4. مراحل روش تخمین سرعت.
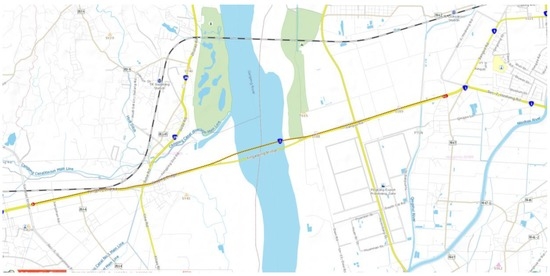
شکل 5. بخش های جاده شهری در محیط آزمایشی.

جدول 1. سیگنال های شبکه تلفن همراه طی تماسی که توسط IMSI 1 در 18 مه 2016 انجام شد.
جدول 2. مطالعه موردی مجموعه داده های تاریخی و یک رکورد جدید.
جدول 3. مقایسه روش پیشنهادی با ویژگی های مختلف برای موقعیت یابی خودرو.
جدول 4. مقایسه روش های مختلف یادگیری ماشین با تمام ویژگی های موقعیت یابی خودرو.
جدول 5. مقایسه پارامترهای مختلف برای موقعیت یابی خودرو.
جدول 6. مقایسه روش پیشنهادی با ویژگی های مختلف برای تخمین سرعت.
© 2016 توسط نویسندگان؛ دارنده مجوز MDPI، بازل، سوئیس. این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (CC-BY) (http://creativecommons.org/licenses/by/4.0/) توزیع شده است.
بدون نظر