

خلاصه
سیستمهای مدرن ژئوتصویرسازی سه بعدی (3DGeoVSs) سیستمهای پیچیده و در حال تکاملی هستند که باید سازگار باشند و از منابع توزیعشده، از جمله دادههای جغرافیایی عظیم استفاده کنند. این مقاله بر روی 3DGeoVSهای ساخته شده بر اساس اصول معماری سرویسگرا، استانداردها و نمایشهای مبتنی بر تصویر (SSI) تمرکز دارد تا به چالشها و پتانسیلهای عملا مرتبط رسیدگی کند. چنین سیستم هایی به اشتراک گذاری منابع و ساخت و تغییر سیستم چابک و کارآمد را به شیوه ای متقابل تسهیل می کنند، در حالی که از تصاویر به عنوان نمایش های کارآمد، جدا شده و قابل تعامل بهره برداری می کنند. معماری نرمافزار 3DGeoVS و مدل تجسم زیربنایی آن تأثیرات قوی بر ویژگیهای کیفیت سیستم دارد و از فعالیتهای مختلف چرخه حیات سیستم پشتیبانی میکند. این مقاله یک معماری مرجع نرمافزار (SRA) برای 3DGeoVSها بر اساس SSI ارائه میکند که میتواند برای طراحی، توصیف و تحلیل معماریهای نرمافزاری بتن با هدف اصلی افزایش اثربخشی و کارایی در چنین فعالیتهایی مورد استفاده قرار گیرد. SRA فناوری موجود، اثبات شده و مشارکت های جدید را به شیوه ای منحصر به فرد ادغام می کند. به عنوان پایهای برای SRA، ما مدل خط لوله تجسم تعمیمیافته را پیشنهاد میکنیم که محدودیتهای بیانی مدل خط لوله تجسم رایج را تعمیم میدهد و بر آن غلبه میکند. برای تسهیل بهرهبرداری از نمایشهای مبتنی بر تصویر (IReps)، SRA رویکردهایی را برای نمایش، تهیه و استایلسازی و تعامل با IReps ادغام میکند. پنج کاربرد SRA اثبات مفهومی را برای کاربرد و کاربرد کلی SRA ارائه می کنند.
ژئو تجسم سه بعدی ؛ معماری مرجع نرم افزار ; زیرساخت داده های مکانی ; معماری سرویس گرا ; استانداردسازی ؛ نمایش مبتنی بر تصویر
1. معرفی
Geovisualization بخشی جدایی ناپذیر از زیرساخت های داده های مکانی (SDIs) و اکثر نرم افزارهای پردازش داده های جغرافیایی را تشکیل می دهد. یک سیستم ژئوتصویرسازی سه بعدی (3DGeoVS) یک سیستم نرم افزاری است که می تواند کاوش بصری، تجزیه و تحلیل، سنتز و ارائه ژئوداده [ 1 ] را که به صورت بصری در فضای دکارتی سه بعدی نمایش داده شده است، تسهیل کند. 3DGeoVS های مدرن سیستم های پیچیده و در حال تکاملی هستند که برای سازگاری و استفاده از منابع توزیع شده، از جمله داده های جغرافیایی عظیم، مورد نیاز هستند. این کار بر روی 3DGeoVS های ساخته شده بر اساس اصول معماری سرویس گرا، استانداردها و نمایش های مبتنی بر تصویر (SSI) به عنوان یک کلاس خاص از 3DGeoVS ها تمرکز دارد که به مجموعه خاصی از چالش ها و پتانسیل های عملا مرتبط می پردازد. طراحی یک 3DGeoVS بر اساس معماری های سرویس گرا توزیع شده (SOA) [ 2] به اشتراک گذاری منابع و ساخت و تغییر سیستم چابک و کارآمد را تسهیل می کند. بکارگیری استانداردها هنگام طراحی 3DGeoVS [ 3 ، 4 ] با بهبود قابلیت همکاری، تحقق پتانسیل طراحی سیستم سرویس گرا را ارتقا می دهد. بهرهبرداری از نمایشهای مبتنی بر تصویر (IReps) [ 5 ، 6 ] از دادههای جغرافیایی، تحقق پتانسیل یک طراحی سیستم مبتنی بر سرویسمحور، مبتنی بر استانداردها را با استفاده از یک نمایش کارآمد، جداشده و متقابل ارتقا میدهد.
یک IRep اطلاعات خاصی را با استفاده از تصاویر نشان می دهد. سیستمهای تجسم معمولاً تصاویر رنگی تولید، خروجی و نمایش میدهند که نمایانگر تجسمهای حاصله است که برای ادراک بصری توسط انسان در نظر گرفته شده است. علاوه بر این، تصاویر می توانند در اصل هر گونه اطلاعات مورد نیاز را به عنوان ورودی یا نتیجه میانی یک فرآیند تجسم نمایش دهند. این کار بر روی IRep هایی متمرکز است که بر اساس بافرهای G از گرافیک های کامپیوتری سه بعدی ساخته شده اند [ 5]. هر یک از این IRep نمایانگر یک مدل سه بعدی جغرافیایی ارجاع شده از یک موقعیت سه بعدی دوربین مجازی ثابت با استفاده از یک طرح مشترک توسط تصاویر شطرنجی دیجیتال دو بعدی استاندارد است. هر تصویر از چنین IRep یک مجموعه ثابت از ویژگی ها در هر پیکسل را رمزگذاری می کند. برای مثال، یک IRep میتواند نمای پرسپکتیو یک منطقه جغرافیایی را با استفاده از ویژگیهایی در هر پیکسل، مانند رنگ ظاهر، هندسه سطح (که به صورت فاصله بین سطح و دوربین مشاهده نمایش داده میشود)، سطح عادی و شناسایی شی را نشان دهد.
IReps در مقایسه با نمایش های جایگزین، مانند ویژگی ها یا نمودارهای صحنه، مزایای مختلفی را ارائه می دهد و به طور فزاینده ای برای اهداف مختلف مورد سوء استفاده قرار می گیرد [ 5 ، 6 ]. IReps می تواند به عنوان نمایش های ساده، رایج، استاندارد، یکپارچه، جدا شده و حساس به خروجی عمل کند. به طور خاص، IReps می تواند یک مدل سه بعدی را به شیوه ای و با نیازهای ذخیره سازی مستقل از نوع و پیچیدگی نمایش و پردازش اصلی آن نشان دهد. برای مثال، استایل دهی بصری یک تصویر در فضای تصویر با وضوح تصویر به جای پردازش ویژگی های اصلی، امکان استایل دادن به یک تصویر را به صورت جداشده پس از تولید تصویر و اجرای خروجی استایل را با حساسیت، موثر و کارآمد می دهد [ 7 ]]. در یک سیستم تجسم توزیع شده، یک کلاینت تجسم تعاملی می تواند نماهای جدیدی را از IReps های ذخیره شده محلی ایجاد کند که مشتری از سرورها بازیابی می کند تا کارایی سمت مشتری، جداسازی و استقلال پلت فرم را بهبود بخشد [ 8 ]. بینندگان نقشه وب دو بعدی رایج این اصل کلی را اعمال می کنند. برنامههایی مانند تکنیکهای ناوبری سهبعدی میتوانند IRPS را به شیوهای کارآمد و حساس به خروجی تجزیه و تحلیل کنند تا حرکت دوربین را در مدل سهبعدی بدون برخورد تسهیل کنند و نماها را برای انتخاب بهترین نمای ارزیابی کنند [ 9 ]. در این کار، ما یک سیستم را بهعنوان «اعمال» یا «استفادهکننده» IRep توصیف میکنیم، زمانی که چنین سیستمی از IReps در فرآیند تجسم فراتر از تولید تصاویر برای نمایش فوری استفاده میکند.
طراحی، توصیف و تحلیل 3DGeoVS بر اساس SSI فعالیت های پیچیده ای هستند. چنین سیستم هایی باید الزامات کلی مختلف [ 10 ] را برآورده کنند، از جمله پشتیبانی از تعامل بالا، تجسم با کیفیت بالا، تجسم مشارکتی (CV) [ 11-13 ] و نماهای چندگانه هماهنگ (CMV) [ 14 ، 15 ] . برای این کار، چنین سیستمهایی فناوریهای مختلف را از حوزههایی مانند تصویرسازی جغرافیایی، GIScience، گرافیک کامپیوتری و مهندسی نرمافزار ترکیب و ادغام میکنند.
هدف از این کار پشتیبانی از طراحی، توصیف و تحلیل موثر و کارآمد 3DGeoVS بر اساس SSI است. معماری نرم افزاری چنین سیستم هایی می تواند به عنوان یک مفهوم مرکزی برای چنین فعالیت هایی عمل کند. معماری نرمافزار 3DGeoVS سازماندهی اساسی و سطح بالا آن را نشان میدهد و انتخاب آن تأثیرات قوی بر ویژگیهای کیفی یک سیستم در مورد توسعه و عملیات دارد [ 16 ]. معماری مرجع نرمافزار (SRA) یک معماری نرمافزار الگوی عمومی است که دانش مربوط به یک کلاس از سیستمهای نرمافزاری را جمعآوری میکند [ 17 ، 18 ]]. یک SRA می تواند در طراحی، توصیف و تجزیه و تحلیل معماری نرم افزارهای بتنی با سود مورد انتظار افزایش اثربخشی و کارایی در چنین فعالیت هایی به دلیل استفاده مجدد از دانش کمک کند. با این حال، در حال حاضر هیچ SRA برای 3DGeoVS های مبتنی بر SSI وجود ندارد. کار قبلی نزدیکتر، مدلهای مرجع را برای سیستمهای مکانی مبتنی بر SOA و استانداردها [ 4 ، 19 ] و معماریهای نرمافزار بتن برای 3DGeoVSها بر اساس SOA و استانداردها [20-37 ] پیشنهاد کرده است. با این حال، کار قبلی یک SRA کلی را برای 3DGeoVS که به بهره برداری از IReps و الزامات مهم دیگر، مانند CV یا CMV می پردازد، هدف قرار نمی دهد.
برای رفع این نگرانیها، این مقاله یک SRA کلی و جزئی برای 3DGeoVSهای مبتنی بر SSI ارائه میکند که میتواند برای طراحی، توصیف و تحلیل معماریهای نرمافزاری بتن استفاده شود. SRA دارای انتزاع عمومی است زیرا برای 3DGeoVS های مبتنی بر SSI بدون محدود شدن به حوزه های کاربردی خاص یا سازمان ها اعمال می شود و از این جهت که به طور محدود فقط جنبه های خاصی از سیستم ها را با عمق و جزئیات محدود پوشش می دهد، پوشش جزئی دارد [ 38 ]. SRA بر روی 3DGeoVS ها برای تجسم تعاملی محیط های ژئومجازی سه بعدی (3DGeoVEs) که مدل های شهر مجازی سه بعدی ایستا و عظیم (V3DCMs) و مدل های منظره سه بعدی مجازی (V3DLMs) را تشکیل می دهند، تمرکز دارد. SRA به ویژه استانداردهای کنسرسیوم فضایی باز (OGC) را اعمال، گسترش و تکمیل می کند. این مقاله مشارکت های زیر را ارائه می دهد:
- به عنوان پایهای برای SRA، مدل خط لوله تجسم تعمیمیافته (بخش 3) را معرفی میکنیم که محدودیتهای بیانی مدل خط لوله تجسم رایج [39-41] را بهویژه با توجه به تبدیل IReps تعمیم میدهد و بر آن غلبه میکند .
- ما یک SRA برای 3DGeoVS ها بر اساس SSI ارائه می کنیم (بخش 4). SRA مفاهیم و فناوری های موجود و جدید پیشنهادی را به شیوه ای منحصر به فرد ادغام می کند. SRA مفاهیم و فناوری را از حوزههای مرتبط، از جمله مدل مرجع پردازش توزیع شده باز (RM-ODP) برای سازماندهی و ارائه [42]، الگوها و سبکهای معماری [43-45]، دادههای جغرافیایی و مدلهای خدماتی استفاده مجدد میکند ، ترکیب و ادغام میکند . [ 4 ]، یک طبقه بندی تعاملی [ 46 ] و استانداردهای OGC و ISO. علاوه بر این، SRA رویکردهای منحصربهفردی را برای جنبههایی از جمله خط لوله تجسم تعمیمیافته، بهرهبرداری از IReps و ادغام CV و CMV ادغام میکند.
- برای تسهیل بهره برداری از IReps، ما به عنوان بخشی یکپارچه از SRA نوع خاصی از IRep و سه نوع سرویس را پیشنهاد می کنیم که به ترتیب از ارائه، استایل و تعامل با IReps پشتیبانی می کنند (بخش 4). یک نمای مبتنی بر تصویر (IView) [ 7 ] نمایانگر یک نمای پیشبینیشده جغرافیایی از یک مدل سهبعدی است. یک سرویس مشاهده وب (WVS) [ 47 ، 48 ] مدلهای سه بعدی را از دیدگاههای مشخص شده ارائه میکند و نتایج را به صورت IViews ارائه میکند. یک سرویس سبک مبتنی بر تصویر وب (WISS) [ 7 ] IVews را با توجه به مشخصات استایل مشخص شده سبک میکند. یک سرویس نمای بدیع (NVS) [ 8] به صورت تعاملی نماهای جدید را از دیدگاه های مشخص شده و IViews ورودی ارائه می کند. به عنوان یک کاربرد تکمیلی SRA، ما یک تکنیک ناوبری تعاملی برای V3DCM پیشنهاد می کنیم که از IViews بهره برداری می کند [ 9 ]. این مقاله به طور خلاصه رویکردها را در زمینه SRA معرفی می کند در حالی که انتشارات مربوطه جزئیات را ارائه می دهند.
- ما پنج کاربرد SRA را ارائه میکنیم که 3DGeoVSهای نمونه را طراحی، توصیف و تحلیل میکنند (بخش 5). برنامه های کاربردی اثبات مفهوم برای کاربرد و کاربرد SRA پیشنهادی را ارائه می دهند.
- در نهایت، ما یک ارزیابی و بحث در مورد SRA پیشنهادی، کاربردهای آن و رویکرد کلی ساخت 3DGeoVS بر اساس SSI ارائه میکنیم (بخش 6).
ساختار باقی مانده این مقاله به شرح زیر است. پس از بررسی کار مرتبط (بخش 2)، مدل خط لوله تجسم تعمیم یافته (بخش 3)، پنج نمای معماری نرم افزار در SRA (بخش 4) و پنج کاربرد SRA را برای 3DGeoVS های نمونه (بخش 5) معرفی می کنیم. در نهایت، ما SRA، برنامه های کاربردی معرفی شده و رویکرد کلی ساخت 3DGeoVS بر اساس SSI (بخش 6) را ارزیابی و بحث می کنیم و با نتیجه گیری (بخش 7) پایان می دهیم.
2. کارهای مرتبط
مدل های تجسم مدلهای فرآیند تجسم پایههای مناسبی برای معماری نرمافزار 3DGeoVSs [ 4 ، 49 ] بودند. مدلهای تولید نمایشهای بصری را میتوان بر اساس مدلسازی تبدیل گام به گام و عملکردی دادهها به نمایشهای بصری در قالب خطوط لوله تجسم و نمودارهای جریان داده [ 39-41 ] باشد . آنها همچنین می توانند بر اساس جنبه های انتزاعی تر، مانند قصد [ 50 ]، کاربران [ 51 ]، وظایف [ 52 ]، زمینه [ 51 ]، داده ها [ 53 ] یا تعامل [ 54 ] باشند.]، برای تولید یا توصیه به طور خودکار بازنمایی های بصری مناسب با استفاده از دانش کدگذاری شده خبره، اکتشافی یا اصول طراحی [ 55 ]. مدلهای تجسم انتزاعهای خاصی را مانند خط لوله تجسم معرفی میکنند: خط لوله، مرحله خط لوله، اپراتورهای ارائهکننده عملکرد مرحله و محصولات دادههای اپراتور [ 39-41 ] . انتزاعات به کار رفته بیشتر به دانه بندی نمایش بصری مربوط می شود، به عنوان مثال، پیکسل ها [ 56 ] علامت ها و متغیرهای بصری [ 57 ]، نمادها به عنوان مجموعه های ساختار یافته از علائم نسبت داده شده [ 58 ]، لایه ها به عنوان مجموعه نمادها یا ویژگی ها [ 58 ]، نمودارهای صحنه [ 59 ، 60 ]]، بازنمایی های بصری [ 61 ] و دیدگاه ها [ 5 ]. انتزاعات گرافیک کامپیوتری، مانند هندسه، مواد، نور و دوربین اغلب مورد استفاده قرار می گیرند [ 55 ، 60 ، 62 ].
این کار یک مدل تجسم جدید را به عنوان تعمیم مدل خط لوله تجسم پیشنهاد می کند. تفاوت آن در ایجاد خطوط لوله معمولاً با ترکیب دلخواه تعداد اپراتورهای سازگار از سه مرحله در هر ترتیب سازگار فراتر از طرح خط لوله سه مرحله ای فیلترینگ/نقشه برداری/رندر ثابت است. این کار از انتزاعات تثبیت شده از خط لوله تجسم، دانه بندی نمایش های بصری و گرافیک کامپیوتری استفاده می کند، در حالی که IVew [ 7 ] را به عنوان یک انتزاع جدید در زمینه 3DGeoVSs معرفی می کند.
معماری مرجع نرم افزار SRAها و مدلهای مرتبط وجود دارند که به ترتیب برای گرافیک کامپیوتری، تجسم، سیستمهای تعاملی، مکانی و سرویسگرا اعمال میشوند. در گرافیک کامپیوتری، مدل مرجع گرافیک کامپیوتری [ 63 ] یک سیستم گرافیک کامپیوتری را به صورت انتزاعی به عنوان یک خط لوله تبدیل پنج مرحله ای (محیط ساخت، مجازی، مشاهده، منطقی و تحقق) توصیف می کند. مدل خط لوله رندر رایج [ 5 ] رندر را به عنوان خط لوله سه مرحله ای (کاربرد، هندسه، شطرنجگر) مدل می کند و معمولاً در انواع مختلف تصفیه شده استفاده می شود [ 64 ، 65 ]. برای سیستم های تجسم، مدل خط لوله تجسم رایج [ 39-41] فرآیند تجسم را به عنوان خط لوله سه مرحله ای (فیلتر کردن، نقشه برداری، رندر) مدل می کند. این مدل برای پوشش جنبهها، از جمله تجسم توزیع شده و CV [ 11 ، 15 ]، CMV [ 14 ]، نقشهبرداری دادههای فضای تصویر [ 66 ]، تجزیه و تحلیل بصری [ 67 ]، سیستمهای سرویسگرا [ 49 ] ، پالایش، گسترش و تکمیل میشود. و خدمات گرا، سیستم های جغرافیایی [ 4 ، 19 ]. Heer و Agrawala [ 68 ] الگوهای طراحی نرم افزار را برای سیستم های تجسم اطلاعات ارائه می دهند. برای سیستمهای تعاملی، مدلهای پیشنهادی شامل طبقهبندی تعامل [ 46 ]، هستیشناسی [ 69 ] است.] و مدل های مرجع [ 70 ]. SRAها و الگوها و سبکهای معماری برای سیستمهای تعاملی توزیع شده [ 44 ]، توزیعشده و مشارکتی [ 71 ] و سرویسگرا [ 72 ، 73 ] پیشنهاد شدهاند. برای سیستم های سرویس گرا با تمرکز بر سیستم های سازمانی، مدل های موجود شامل هستی شناسی ها [ 74 ]، SRA ها [ 18 ، 72 ، 73 ] و مدل های مرجع [ 17 ] است. برای سیستم های جغرافیایی، خدمات گرا، [ 3] یک مدل مرجع استاندارد برای خدمات اطلاعات جغرافیایی و اطلاعات جغرافیایی تعریف می کند که از طریق سری استانداردهای ISO 19100 به تفصیل شرح داده شده است. مدلهای مرجع برای سیستمهای مبتنی بر استانداردهای OGC در [ 4 ، 19 ] با تمرکز [ 75 ، 76 ] روی برنامههای مشتری پورتال تعریف شدهاند. برای SDI، مدلهای مرجع و SRA از ابتکارات SDI مختلف، مانند SDI ملی ایالات متحده [ 77 ]، SDI کانادا [ 78 ]، SDI اروپا [ 79 ] و از دانشگاه [ 80-82 ] پیشنهاد شدهاند و معمولاً بر اساس استانداردها
این کار یک SRA را برای 3DGeoVS ها بر اساس SSI پیشنهاد می کند. این SRA به صراحت از مدلهای موجود، از جمله انواع نمایش و انتزاعها، مانند نمودارهای صحنه و IREps [ 5 ، 83 ] از گرافیک رایانهای، مدل خط لوله تجسم [ 39-41 ]، یک طبقهبندی تعامل [ 46 ]، یک مدل CV [ 11 ] استفاده مجدد میکند. ] و یک مدل CMV [ 14 ] از تجسم تعاملی و SOA، الگوها و سبک های معماری از سیستم های توزیع شده و مهندسی نرم افزار [ 43-45 ] . علاوه بر این، SRA از استانداردهای مختلفی از گرافیک کامپیوتری، سیستم های توزیع شده، SOA و حوزه جغرافیایی (بخش 4.5)، RM-ODP [ 42 ] استفاده مجدد می کند.] و UML برای سازماندهی و ارائه و چارچوب موجود برای ارزیابی [ 84]. برخلاف کار قبلی، SRA پیشنهادی خط لوله تجسم تعمیم یافته پیشنهادی را اعمال میکند که شامل طبقهبندی خدمات و مدلی برای ترکیب خطوط لوله از خدمات میشود. انواع سرویس های جدید و معماری سرویس مبتنی بر SOA، خط لوله تجسم تعمیم یافته و الگوهای معماری را معرفی می کند. این مدل های موجود CMV و CV را با SOA تطبیق می دهد. SRA یکپارچه سازی خدمات فیزیکی را برای معاوضه بازده زمان اجرا با قابلیت نگهداری سیستم اعمال می کند و مورد بحث قرار می دهد و IViews را به عنوان IReps و انواع سرویس های جدید WVS، WISS و NVS را برای بهره برداری از IReps معرفی می کند. علاوه بر این، SRA پیشنهادی در کلاس سیستم هایی که هدف قرار می دهد و مجموعه مدل ها و استانداردهایی که ادغام و ترکیب می کند منحصر به فرد است. طبق دانش ما، هیچ SRA دیگری برای کلاس هدف سیستم ها وجود ندارد. اگرچه مدلهایی برای جنبههای مختلف این سیستمها وجود دارد، هیچ مدلی مدلهای مورد نیاز را در یک SRA واحد ترکیب نمیکند. به عنوان مثال، مدل های مرجع موجود برای SDI ها، از ژئوتصویرسازی سه بعدی و بهره برداری از IREP غافل می شوند. نزدیکترین به SRA پیشنهادی، مدلهای مرجع OGC برای سیستمهای SOA مبتنی بر استاندارد و مکانی است [4 ، 19 ] و پیاده سازی های 3DGeoVS مشتق شده (به زیر مراجعه کنید). با این حال، این پیشنهادات هنوز فاقد ویژگی های محدود کننده فوق الذکر SRA و به ویژه پشتیبانی برای بهره برداری از IReps و خط لوله تجسم تعمیم یافته هستند.
سیستم های. سیستم های تجسم تعاملی قبلاً به عنوان سیستم های توزیع شده [ 11 ، 15 ، 85 ]، سیستم های توزیع شده بر اساس استانداردها [ 86 ]، سیستم های توزیع شده بر اساس SOA [ 49 ، 87 ] و 3DGeoVS های توزیع شده بر اساس SOA و استانداردها طراحی شده اند [ 20-37 ، ].
این کار معماری یک 3DGeoVS بر اساس SSI را در نتیجه اعمال SRA پیشنهادی معرفی میکند (بخش 5.1). شباهت ها و تفاوت های فوق الذکر SRA با کارهای قبلی در مورد معماری معرفی شده به عنوان نمونه ای از SRA نیز صدق می کند. به طور خاص، سیستمهای قبلی فاقد بهرهبرداری از IReps هستند که در این کار مشخص شده است. به عنوان تفاوت های اضافی نسبت به کار قبلی، معماری معرفی شده یک تکنیک ناوبری جدید را برای V3DCM هایی که از IReps بهره برداری می کنند ادغام می کند [ 9 ]]. علاوه بر این، ایده جداسازی و توزیع محاسبات مستقل و وابسته به دید را برای بهبود کارایی اعمال میکند. محاسبات مستقل از View در سمت سرور انجام میشوند و در سمت کلاینت برای نماهای جدید مختلف با محاسبات وابسته به view در بالا استفاده میشوند. ما درباره کارهای مرتبط بیشتر در مقالات اختصاصی که به IVews و WVS [ 7 ، 47 ، 48 ]، WISS [ 7 ]، NVS [ 8 ] و تکنیک ناوبری پیشنهادی [ 9 ] مربوط میشوند، بحث میکنیم.
3. مدل خط لوله تجسم تعمیم یافته
این بخش مدل خط لوله تجسم تعمیم یافته را به عنوان مدلی از فرآیند تجسم معرفی می کند. این یک پایه برای SRA معرفی شده در این مقاله و چندین مشارکت دیگر در این کار است. ما مدل خط لوله تجسم سنتی و محدودیت های آن، مدل خط لوله تجسم تعمیم یافته را برای غلبه بر این محدودیت ها و کاربردها و کاربردهای مدل معرفی شده ارائه می کنیم.
مدل خط لوله تجسم [ 39-41 ] رایج ترین مدل فرآیند تجسم [ 41 ] است . این مدل بهعنوان نقطه شروع انتخاب میشود، زیرا رایج و ثابت شده است که پایهای مناسب برای معماریهای نرمافزاری سیستمهای تجسم سرویسگرا [ 4 ، 49 ] است.]، به ویژه به دلیل امکان نقشه برداری به روشی ساده و درشت بین مراحل خط لوله تجسم و خدمات معماری. مدل خط لوله تجسم فرآیند تجسم را به عنوان یک خط لوله تبدیل داده توصیف می کند که از سه مرحله متوالی تشکیل شده است: داده های ورودی (F) به داده های پیشرفته و غنی شده فیلتر می شوند، سپس (M) به هندسه و ویژگی های بصری نگاشت می شوند و در نهایت، ارائه می شوند (R) به یک تصویر قابل نمایش هدف کلی و معنایی هر مرحله و ویژگی های کلی داده های ورودی و خروجی هر مرحله را تعریف می کند. خط لوله تجسم را می توان به عنوان یک نمودار جریان داده نشان داد که یک گراف غیر چرخه ای جهت دار متصل را تشکیل می دهد [ 39-41 ، 61]. در چنین نمودارهایی، هر یال جهتدار نشاندهنده دادههایی است که بین گرهها جریان دارند، و هر گره نشاندهنده یک عملگر تبدیلکننده داده (همچنین ماژول) است که یا یک اپراتور مرحلهای است که یک مرحله را به طور جزئی یا کامل اجرا میکند یا یک منبع داده یا سینک داده را نشان میدهد. گرههای منبع دارای لبههای ورودی صفر هستند و دادههای مبدأ را بهعنوان عملگر نشان میدهند، گرههای سینک لبههای خروجی صفر دارند و دادههای حاصل را بهعنوان عملگر نشان میدهند، و ترتیب مراحل پیادهسازی شده توسط اپراتورهای مرحله در هر مسیر از یک منبع به یک گره سینک، فیلتر کردن، نقشهبرداری است. و رندرینگ داده ها از گره های منبع در امتداد لبه ها از طریق عملگرهای تبدیل جریان می یابند و به عنوان نتایج در گره های سینک جمع آوری می شوند.
در حالی که مدل خط لوله تجسم، انتزاعات و تفکیک نگرانی های با ارزش و اثبات شده را ارائه می دهد، مدل خط لوله سه مرحله ای ثابت آن نمی تواند بسیاری از فرآیندهای تجسم مرتبط را بیان کند. به عنوان مثال، مدل خط لوله تجسم نمیتواند تکنیکهای بهکار رفته در تبدیل و پس پردازش تصاویر را پس از رندر بیان کند [ 5 ، 7 ]. علاوه بر این، مدل خط لوله تجسم نمی تواند به طور مناسب معماری پیچیده 3DGeoVS ارائه شده در بخش 5.1 را توصیف کند. در اصل، مدل خط لوله تجسم نمی تواند توالی خاصی از مراحل را که عملا مرتبط هستند بیان کند. میز 1قطعات توالی دو مرحلهای را که مدل خط لوله تجسم نمیتواند بیان کند، برمیشمارد، آنها را مشخص میکند و نمونههای کاربردی عملا مرتبط را ترسیم میکند. شکل 1 هر دو توالی مرحله ای را که خط لوله تجسم می تواند بیان کند و آنهایی که نمی تواند بیان کند را نشان می دهد.
برای غلبه بر این محدودیت ها، ما مدل خط لوله تجسم تعمیم یافته را بر اساس مدل خط لوله تجسم سنتی پیشنهاد می کنیم. مدل خط لوله تجسم تعمیم یافته به طور کلی امکان تشکیل خطوط لوله را با ترکیب دلخواه تعداد اپراتورهای سازگار از سه مرحله به هر ترتیبی فراهم می کند ( شکل 1).). مدل خط لوله تجسم سنتی، یک اپراتور را با توجه به ویژگیهای دادههای ورودی و خروجی آن بهعنوان نوع فیلتر، نقشهبرداری یا رندر طبقهبندی میکند و فرض میکند که اپراتورها بر اساس نوع آنها مرتب شدهاند. این مدل دادهها را بر اساس ویژگیهای آن بهعنوان بهبودیافته و غنیشده، نشاندهنده هندسه و ویژگیهای بصری، تصاویر قابل نمایش یا نداشتن هیچ یک از این ویژگیها (دادههای خام) طبقهبندی میکند. در مقابل، خط لوله تجسم تعمیمیافته، اپراتورها را تنها بر اساس ویژگیهای دادههای خروجی آنها طبقهبندی میکند (به عنوان مثال، رندر کردن اپراتورها از هر ورودی مناسب، IReps را خروجی میکند) و به فرد اجازه میدهد تا انواع اپراتورها را با هر ترتیب سازگار ترکیب کند. به عنوان مثال، اپراتورهای رندر A و B سازگار هستند و می توانند به این ترتیب ترکیب شوند (Transition 8 inجدول 1 )، اگر اپراتور B IReps را به عنوان ورودی بپذیرد. به عنوان علامت اختصاری برای هر خط لوله تجسم تعمیم یافته مفهومی، ریاضی یا پیاده سازی شده با حداقل صفر یا یک عملگر، ما به ترتیب از FMR * یا FMR + (برگرفته از نماد عملگر Kleene) استفاده می کنیم.
مدل خط لوله تجسم تعمیم یافته می تواند برای طراحی، توصیف و تجزیه و تحلیل خطوط لوله تجسم و سیستم های تجسم مربوطه به طور موثرتر، دقیق تر و با جزئیات بیشتر در مقایسه با حالت خط لوله تجسم سنتی استفاده شود. مدل پیشنهادی پایه ای برای چندین مشارکت در این کار است. SRA برای 3DGeoVS بر اساس SSI (بخش 4) و معماری یک 3DGeoVS پیچیده (بخش 5.1) بر اساس مدل پیشنهادی است. خطوط لوله پردازش پیش پردازش و زمان اجرا تکنیک ناوبری پیشنهادی [ 9 ] با استفاده از مدل پیشنهادی شرح داده شده است. در [ 7]، ما یک جبر سبک مبتنی بر تصویر را بر اساس مدل پیشنهادی ارائه میدهیم که امکان مدلسازی استایل مبتنی بر تصویر (IStyling) را به عنوان یک ترکیب عملکردی از عملگرهای عنصری انواع فیلترینگ، نقشهبرداری و ترکیب (به عنوان تخصصی رندر) با استفاده از IReps به عنوان یکپارچه فراهم میکند. نمایش مدل سه بعدی برای ورودی و خروجی اپراتور. این نمایش یکپارچه یک ویژگی مهم است که به فرد امکان می دهد عملگرها را تقریباً دلخواه بنویسد.
4. نماهای معماری نرم افزار
این بخش پنج نما از SRA را برای 3DGeoVS ها بر اساس SSI ارائه می دهد. هر دیدگاه بر اساس یک دیدگاه است که در RM-ODP [ 42 ] تعریف شده است و شامل مدل های معماری [ 16 ] است. RM-ODP یک “چارچوب هماهنگ کننده برای استانداردسازی پردازش توزیع باز” [ 42 ] ارائه می کند. ما RM-ODP را برای سازمان انتخاب میکنیم، زیرا قبلاً برای مدلسازی SOAها به طور کلی و در حوزه جغرافیایی [ 19 ، 80-82 ، 93 ] پیشنهاد و استفاده میشود . برای اطلاع از طراحی SRA پیشنهادی (بخش 4)، کاربردهای آن (بخش 5) و ارزیابی آنها (بخش 6)، ما از مجموعه ای از الزامات عمومی منتشر شده در [ 10 ] مجددا استفاده می کنیم.
بخشهای زیر پنج دیدگاه را به شرح زیر ارائه میکنند: دیدگاه سازمانی (بخش 4.1) هدف سیستمهای هدف را مشخص میکند و دو نقش کاربر، از جمله موارد استفاده مرتبط را معرفی میکند: بیننده و نویسنده. دیدگاه اطلاعات (بخش 4.2) بر بازنمایی و پردازش اطلاعات تمرکز دارد و سه دسته اصلی از انواع داده ها را معرفی می کند: انواع مدل های سه بعدی، انواع مشخصات مرحله و انواع ابرداده. دیدگاه محاسباتی (بخش 4.3) بر تجزیه منطقی و عملکردی سیستم به خدمات تمرکز دارد و معماری کلی سرویس، پشتیبانی معماری برای CMV و CV و زنجیره خدمات را توصیف می کند. دیدگاه مهندسی (بخش 4.4) بر پشتیبانی از تعامل توزیع شده در سیستم متمرکز است و به معماری فیزیکی یک سیستم مربوط می شود. دیدگاه فناوری (بخش 4.
4.1. دیدگاه سازمانی
دیدگاه سازمانی بر “هدف، دامنه و سیاست های یک سیستم” تمرکز دارد [ 42 ].
اشیاء، اهداف، فرآیندها و الزامات سازمانی سطح بالا مشخصه سیستم است. به عنوان اشیاء سازمانی سطح بالا، این سیستم با 3DGeoVE ها سروکار دارد که به عنوان مدل های سه بعدی فضای V3DCM و V3DLM را بر اساس داده های جغرافیایی ترکیب و نشان می دهند. هدف اصلی سیستم ایجاد بینش در داده های جغرافیایی با استفاده از تجسم تعاملی است [ 1 ]. این سیستم یک زنجیره ارزش خاص برای اطلاعات مکانی [ 19 ] پیادهسازی میکند که دادههای جغرافیایی پایه را به منظور تجسم به دادههای جغرافیایی مشتق شده با ارزش افزوده تبدیل میکند. این سیستم مسئولیتی در قبال کسب یا تولید داده های جغرافیایی پایه ندارد. در عوض، متکی به ارائه داده های جغرافیایی ورودی پایه یا مشتق شده است. الزامات کلیدی کلی برای سیستم مربوط به فناوری در [10 ].
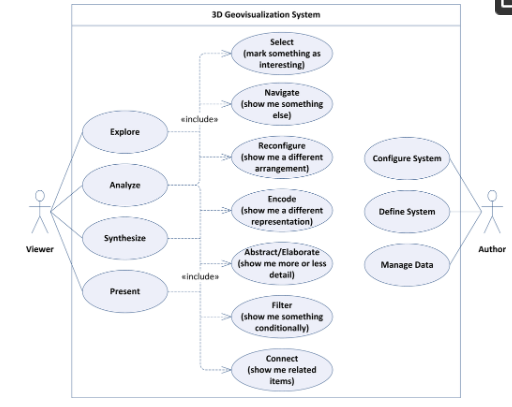
نقش اصلی کاربرانی که با سیستم در تعامل هستند، بیننده و نویسنده است ( شکل 2 ). یک بیننده از این سیستم برای کاوش، تجزیه و تحلیل، ترکیب یا ارائه بازنمایی های بصری سه بعدی از داده های جغرافیایی استفاده می کند [ 1 ]. هر یک از این موارد استفاده اولیه شامل هفت مورد استفاده ثانویه است که میتواند در زمانی که بیننده در موارد استفاده اولیه با سیستم تعامل دارد فعال باشد. موارد استفاده ثانویه به بیننده این امکان را می دهد که انتخاب، پیمایش، پیکربندی مجدد، رمزگذاری، انتزاع یا تفصیل، فیلتر یا اتصال بازنمایی های بصری ارائه شده را انجام دهد. موارد استفاده ثانویه بر اساس طبقه بندی تکنیک های تعامل در تجسم است که مبتنی بر مفهوم قصد کاربر است [ 46 ]]. ما این طبقهبندی را انتخاب میکنیم زیرا سطح انتزاع آن و مبتنی بودن آن بر قصد کاربر، آن را برای تعریف موارد استفاده مناسب میکند، و آن را برای طبقهبندی تعاملات رخداده مناسب میدانیم (بخش 5.1). یک نویسنده از سیستم برای تعریف سیستم استفاده می کند (مثلاً با انتخاب سرویس ها و ترکیب آنها به سرویس های ترکیبی مورد استفاده به عنوان بخشی از سیستم)، پیکربندی سیستم (مثلاً با پیکربندی سرویس ها) یا مدیریت داده های موجود یا ارجاع شده توسط سیستم (مثلاً ، برای ایجاد، خواندن، به روز رسانی یا حذف داده ها). چندین بیننده و نویسنده می توانند به طور همزمان از سیستم استفاده کنند. اثرات استفاده از سیستم برای بینندگانی که در CV شرکت نمی کنند جدا شده است و می تواند برای سایر کاربران یا نویسندگان قابل مشاهده باشد. موارد استفاده معرفی شده در سطح بالا و شکل ایده آل معمولی هستند. برای یک سیستم عملی،
4.2. دیدگاه اطلاعاتی
دیدگاه اطلاعات بر معنای شناسی اطلاعات، پردازش اطلاعات و مدل سازی اطلاعات مشترک که توسط سیستم دستکاری می شود، تمرکز دارد [ 42 ]. SRA از سه دسته عمده از انواع داده ها برای انتقال داده ها بین سرویس هایی که خطوط لوله تجسم را تشکیل می دهند استفاده می کند: انواع مدل های سه بعدی، انواع مشخصات مرحله و انواع ابرداده.
به عنوان انواع نمایش مدل سه بعدی، سیستم از سه نوع نمایش تثبیت شده استفاده می کند: ویژگی (از حوزه مکانی [ 4 ])، نمودار صحنه (از حوزه گرافیک کامپیوتری [ 5 ]) و IRep (از گرافیک کامپیوتری، پردازش تصویر و حوزه های جغرافیایی. [ 4-6 _ _]). علاوه بر این، دادههای دیگر به دادههایی اشاره میکنند که بهعنوان ویژگیها، نمودارهای صحنه یا IRep نمایش داده نمیشوند. با توجه به خط لوله تجسم تعمیمیافته، ویژگیها، نمودارهای صحنه و IReps هر کدام میتوانند برای نمایش خروجی اپراتور فیلتر کردن یا نمایش هندسه و ویژگیهای بصری برای نمایش خروجی اپراتور نقشهبرداری، بهبود یافته و غنیتر شوند. با این حال، تنها IReps به عنوان تصاویر قابل نمایش برای نمایش خروجی اپراتور واجد شرایط هستند. مجموعه انواع ارائه مدل سه بعدی پیشنهادی کامل است به این معنا که حداقل یک نوع نمایش مدل سه بعدی برای هر دسته داده خط لوله تجسم وجود دارد. برای کاربردهای خاص، ویژگی نوع عمومی را می توان تخصصی کرد (به عنوان مثال، با استفاده از CityGML [ 94] برای نمایش V3DCM). در مقابل، نمودارهای صحنه و IRep ها نیازی به نمایش صریح مفاهیم برنامه ندارند، اما در عوض ممکن است برای دسترسی به داده های خاص برنامه از ویژگی ها (به عنوان مثال، پیوند هندسه نمودار صحنه یا پیکسل IRep به ویژگی منبع، نیاز به رمزگذاری پیوندها به ویژگی های منبع باشد. آن را از طریق شناسه ها نشان می دهد [ 7 ، 9 ]).
انواع مشخصات مرحله، پیکربندی پردازش اپراتورهای خط لوله تجسم فردی متعلق به یک مرحله خاص را مشخص می کند. ما به صراحت چهار نوع مشخصات مرحله را تعریف می کنیم. رمزگذاری فیلتر نحوه نگاشت یک اپراتور فیلترینگ ویژگی ها را به ویژگی های فیلتر شده (مثلاً با انتخاب) کنترل می کند [ 89 ]. مشخصات یک ظاهر طراحی مبتنی بر ویژگی، استایل مبتنی بر ویژگی (FStyling) را کنترل می کند، به عنوان مثال ، چگونه یک اپراتور نقشه برداری ویژگی ها را به نمودارهای صحنه نگاشت می کند [ 23 ، 58 ، 60 ، 62 ، 95 ]. مشخصات رندر یک اپراتور رندر را کنترل می کند، به عنوان مثال، با تعریف مشخصات دوربین، و ابعاد تصویر خروجی، کدگذاری و کیفیت [ 47 ،48 ]. مشخصات یک ظاهر طراحی مبتنی بر تصویر، IStyling را کنترل می کند، به عنوان مثال ، چگونه یک اپراتور فیلتر، نقشه برداری یا رندر یک IRep را به یک IRep خروجی نگاشت می کند [ 7 ]. ترکیبی از مراحل خط لوله تجسم، انواع مشخصات مرحله ورودی و انواع نمایش مدل سه بعدی ورودی وجود دارد. ما بر روی یک خط پایه خاص تمرکز می کنیم و به طور کامل کاوش و تعریف انواع مشخصات مرحله را برای کارهای آینده ترک می کنیم. به عنوان یک خط مبنا، مسیرهای متصل اپراتورها با انواع مشخصات مرحله تعریف شده وجود دارد که ویژگی های ورودی را به IReps خروجی قابل نمایش تبدیل می کند ( شکل 3 ).
مصرفکنندگان خدمات به ابردادههایی در مورد ارائهدهندگان خدمات و دادههای ارائهشده توسط آنها نیاز دارند تا آنها را قادر به یافتن و پیوند دادن خدمات ارائهشده مطابق با نیازهایشان و تنظیم با قابلیتهای خدمات موجود کنند [ 93 ، 96 ]. به عنوان انواع عمده ابرداده، سیستم از انواع متاداده نمونه خدمات استاندارد [ 19 ، 93 ] و انواع متاداده مجموعه داده [ 19 ، 96 ] استفاده می کند.
4.3. دیدگاه محاسباتی
دیدگاه محاسباتی بر تجزیه عملکردی سیستم به خدماتی متمرکز است که در رابطها تعامل دارند، بنابراین توزیع را قادر میسازند [ 42 ]. دیدگاه محاسباتی مربوط به معماری منطقی یک سیستم است [ 93 ]. معماری منطقی از کلاس هایی از انواع داده های معرفی شده در بخش 4.2 همانطور که در زیر توضیح داده شده است استفاده می کند. این بخش معماری کلی خدمات، پشتیبانی معماری برای CMV و CV و زنجیره خدمات را توضیح می دهد.
معماری خدمات
ما مفاهیم SOA [ 2 ]، خط لوله تجسم تعمیم یافته تعاملی و الگوهای معماری (الگوهای کوتاه) [ 44 ، 45 ] را مرتبط و ادغام می کنیم. از این مفاهیم، ما تجزیه یک 3DGeoVS اساسی و عمومی را به خدمات و جریان داده بین سرویس ها استخراج می کنیم ( شکل 4). به عنوان اصل سازماندهی اصلی، عملکرد بر اساس سطوح مختلف انتزاع به لایه های SOA با استفاده از الگوی لایه و به صورت عمودی به زیر دامنه ها تقسیم و طبقه بندی می شود. عملکردها با استفاده از الگوی شی دامنه ای که رابط های صریح برای دسترسی به خوبی تعریف شده و پیاده سازی های محصور شده برای جدا کردن مصرف کنندگان خدمات از پیاده سازی های سرویس ارائه می دهد، به خدمات جدا شده و مدولار می شود. ارتباطات سرویس و معماری کلی به ترتیب از سبک معماری مشتری-سرور و SOA استفاده می کنند.
در زیردامنه Viewers، خط لوله تجسم تعمیم یافته به عنوان برنامه های کاربردی لوله ها و فیلترها (به طور بالقوه با استفاده از نوع سه راهی و اتصال) و تغییر الگوهای نمای مدل می شود و با توالی خدمات داده (به عنوان منبع داده)، FMR عملکردی * ، تعامل نشان داده می شود. FMR * و نمایشگر (به عنوان سینک داده). لایه داده و سرویس های داده با استفاده از الگوی لایه دسترسی به پایگاه داده، از سرویس های سطح بالاتر از ویژگی های ذخیره سازی داده محافظت می کنند. هر دو سرویس FMR * یک خط لوله تجسم تعمیم یافته را پیاده سازی می کنند که در مجموع حداقل یک مرحله را اجرا می کند و هر کدام را می توان به صورت صفر یا چند سرویس متصل نشان داد. FMR عملکردی *سرویس پردازش تجسمی را ارائه میکند که میتواند زمانهای پاسخ با تأخیر بالایی داشته باشد و به طور بالقوه توزیع شود، در حالی که سرویس تعامل FMR * پردازش تصویری را ارائه میکند که به صراحت از تعامل کاربر با زمانهای پاسخ کم تأخیر پشتیبانی میکند و به طور بالقوه میتواند به صورت فیزیکی با سایر سرویسهای لایه تعامل ادغام شود. برای پشتیبانی از نقش کاربر Viewer، سرویس Viewer Display یک IRep از یک FMR * دریافت می کند.سرویس و آن را به Viewer نمایش می دهد. ورودی را از Viewer از طریق دستگاه های ورودی می پذیرد. سرویس Viewer Controller رویدادهای ورودی (مثلاً مختصات کلیک ماوس یا لمس) را به دستوراتی برای بهروزرسانی تصویرسازی تبدیل میکند. Viewer Process به عنوان یک نما، واسطه و کنترل کننده برنامه عمل می کند که Viewer Controller را از خط لوله تجسم جدا می کند و این دستورات را به دنباله ای از فراخوانی های سرویس و پارامترهای مربوطه برای اجرای خط لوله تبدیل می کند. این فرآیند را می توان به تعامل بیننده فرآیند برای هماهنگی لایه تعامل بین نمایشگر، تعامل FMR * تقسیم کرد.و لایه های پایین تر و Viewer Process Functional برای هماهنگی لایه های عملکردی و داده بین سرویس های خط لوله. فرآیند Viewer حلقه تعامل را می بندد. شکل 4 نگاشت خدمات ارائه شده به الگوی مدل-نما-کنترل را نشان می دهد. سرویسها به طور جمعی از موارد استفاده اولیه Viewer پشتیبانی میکنند و به بیننده اجازه میدهند تا به کاوش، تجزیه و تحلیل، ترکیب و ارائه بازنماییهای بصری بپردازد (بخش 4.1).
زیر دامنه Author از موارد استفاده نویسنده پشتیبانی می کند و به نویسنده اجازه می دهد تا سیستم را تعریف کند، سیستم را پیکربندی کند و داده ها را مدیریت کند. برای این کار، سرویس نمایش نویسنده نمایی از ترکیب سرویس، پیکربندی و داده های سیستم را به نویسنده ارائه می دهد و ورودی نویسنده را می پذیرد. کنترل کننده نویسنده رویدادهای ورودی را به دستوراتی تبدیل می کند که باید توسط «تعامل فرآیند نویسنده» برای دستورات مربوط به تعامل و «فرایند نویسنده تابعی» برای دستورات مربوط به خط لوله اجرا شوند. سرویسهای Author Process مجموعاً به فرد اجازه میدهند تا نمایشگر نویسنده را بهروزرسانی کند، سرویس کاتالوگ را (به عنوان کاربرد الگوی جستجو) جستجو کند تا نمونههای سرویس مناسب را برای تعریف ترکیب سرویس سیستم پیدا کند و دادهها را پیوند و پیکربندی کند، FMR *و خدمات Viewer Display. با پیروی از اصول طراحی SOA [ 2 ]، سرویسهای روی لایه فرآیند و تعامل معمولاً حالت دارند، سرویسهای لایه عملکرد باید بدون حالت باشند و سرویسهای روی لایه داده دارای وضعیت هستند.
نماهای چندگانه هماهنگ شده
CMV یک تکنیک کلیدی برای تجسم اکتشافی است که در آن نماهای متعدد داده ها را به کاربر ارائه می دهند و عملیات روی نماها هماهنگ می شوند [ 12 ]. ما پذیرش یک مدل موجود برای CMV [ 14 ] را به SOA توصیف میکنیم ( شکل 5 ، Viewer 1 و Viewer 2 نشاندهنده همان کاربر است که دو نمایشگر متفاوت اما هماهنگ را مشاهده میکند) [ 10 ]. این مدل به این دلیل انتخاب شده است که بر اساس مدل خط لوله تجسم است و می تواند برای توصیف طیف گسترده ای از نمونه های CMV استفاده شود [ 14 ]]. ما از آن برای گسترش معماری سرویس ارائه شده با پشتیبانی از CMV استفاده می کنیم. مرکز پذیرش، معرفی یک سرویس هماهنگ کننده است. یک هماهنگ کننده جنبه های دو یا چند خط لوله متصل مانند پارامترهای نمایش، مراحل خط لوله و داده ها را هماهنگ و همگام می کند. یک Coordinator رویدادهای Viewer Controller را دریافت میکند و آنها را به فراخوانهای Viewer Process از خطوط لوله متصل تبدیل میکند. به عنوان مثال، یک هماهنگ کننده ممکن است یک رویداد را برای تغییر دیدگاه از Pipeline 1 به یک رویداد برای تغییر دیدگاه در Pipeline 2 بر این اساس تبدیل کند. خطوط لوله نمایشگرهای مختلف می توانند داده ها و مراحل را به اشتراک بگذارند (فن ورودی/خروج)، اما این ضروری نیست. یکی از ویژگی های CMV این است که حداقل دو نمایشگر به یک کاربر ارائه می شود و حداقل یک تغییر پارامتر در یک خط لوله توسعه یافته روی خط لوله توسعه یافته دیگر تأثیر می گذارد.
تجسم مشارکتی
پشتیبانی از CV مورد نیاز است تا به گروهی از افراد اجازه دهد تا با هم بر روی وظایف مربوط به تجسم جغرافیایی [ 13 ] کار کنند. ما پذیرش یک مدل موجود را برای CV توزیع شده، همزمان (مکان متفاوت، در همان زمان) [ 15 ] به SOA [ 10 ] توصیف میکنیم. این مدل به این دلیل انتخاب شده است که بر اساس مدل خط لوله تجسم است و می تواند برای توصیف طیف گسترده ای از نمونه های CV استفاده شود [ 11 ، 15 ]. ما از آن برای گسترش معماری سرویس ارائه شده با پشتیبانی از CV استفاده می کنیم. CV همزمان را می توان با اشتراک گذاری انتخابی داده ها، عملکرد (به عنوان مثال، مراحل) یا کنترل بین کاربران مشخص کرد [ 11 ]]. یک سیستم CV توزیع شده را می توان به عنوان مجموعه ای از خطوط لوله مدل کرد. خطوط لوله می توانند کامل یا جزئی باشند و می توانند داده ها و مراحل را به اشتراک بگذارند. هر کاربر شرکت کننده خروجی حداقل یک خط لوله را دریافت می کند و می تواند مجموعه خطوط لوله را در مراحل خاص کنترل کند. اطلاعات کنترل برای یک مرحله در یک خط لوله می تواند برای یک مرحله مربوطه در یک خط لوله متفاوت برای همگام سازی مراحل استفاده شود. مدلهای پیشنهادی اولیه برای CMV [ 14 ] و برای CV [ 15] شباهت های زیادی دارند. در هر دو مدل، حداقل دو نمایشگر وجود دارد (برای یک کاربر در CMV و دو کاربر در CV) و داده ها، عملکرد و کنترل را می توان به اشتراک گذاشت. برای CMV، اشتراک گذاری ضروری نیست. با این حال، حداقل یک تغییر پارامتر در یک خط لوله باید منجر به تغییر پارامتر تغییر یافته در یک خط لوله دیگر شود. برای CV، به اشتراک گذاری داده ها، عملکرد یا کنترل ضروری است. هنگام اشتراک گذاری کنترل، تغییرات پارامتر معمولاً بدون تغییر بین خطوط لوله به اشتراک گذاشته می شود. به دلیل شباهت ها، پذیرش CMV به SAO ( شکل 5، Viewer1 و Viewer2 دو کاربر متفاوت را نشان می دهند) می توانند برای مدل سازی CV نیز استفاده شوند. برای CV، به اشتراک گذاری کنترل را می توان تنها نمونه دیگری از هماهنگی در نظر گرفت. رویدادهای ورودی کاربر از کاربران مختلف همگی از Coordinator مرکزی عبور می کنند. Coordinator دانش مربوط به چه رویدادی از کاربر را در بر روی فرآیند بیننده به چه شکلی تحت تأثیر قرار می دهد.
زنجیره خدمات
معماری سرویس از چندین سرویس همکاری برای ارائه عملکرد خود استفاده می کند. زنجیره خدمات مدلی برای ترکیب خدمات در یک سری وابسته برای دستیابی به وظایف بزرگتر است. زنجیره خدمات یک سرویس ترکیبی خاص است که به عنوان دنباله ای از خدمات تعریف می شود که در آن برای هر جفت سرویس مجاور، وقوع اولین اقدام برای وقوع عمل دوم ضروری است [ 93 ]. توضیحات قبلی از زنجیره های خدمات در این مقاله بر جریان اصلی داده بین سرویس ها متمرکز بود. این بخش، الگوهای مختلف معماری قابل ترکیب را برای تسهیل طراحی با جزئیات بیشتر، انتقال داده، کنترل جریان و شفافیت و کنترل زنجیره های خدمات ارائه می کند. انتخاب الگوها می تواند بر ویژگی های کیفیت معماری نرم افزار تأثیر بگذارد [ 43 ,93 ]. به عنوان یک محدودیت، رابط های سرویس خاص که در یک زنجیره خدمات رخ می دهد، تعیین می کند که کدام الگوها می توانند در چه ترکیب هایی استفاده شوند.
برای انتقال داده بین دو سرویس مجاور در یک زنجیره خدمات، چهار الگوی زنجیرهای انتقال داده را متمایز میکنیم ( شکل 6 ). الگوی پایدار امکان ذخیره نتایج پردازش بالقوه حجیم را برای دسترسی جدا شده و استفاده مجدد فراهم می کند. الگوهای مستقیم و واسطه برای پردازش درخواستی مناسب هستند اگر داده ها گذرا و حجمی نباشند. الگوی مستقیم ممکن است باعث پایینترین سربار شود، زیرا دادهها از سرویس سوم عبور نمیکنند. الگوی میانجی به سرویس سطح بالاتر این فرصت را می دهد تا داده ها را برای ارائه خدمات خود ارزیابی و پردازش کند و خدمات زیر را کنترل و میانجیگری کند. الگوی پایدار واسطه ای ویژگی های الگوی واسطه و الگوی پایدار را ترکیب می کند.
برای طراحی جریان کنترل اجرای یک زنجیره خدمات، ما سه الگو [ 43 ، 93 ] را متمایز می کنیم ( شکل 7)). در الگوی جریان کنترل واسطه، سرویس ترکیبی به نوبه خود خدمات شرکت کننده را فراخوانی می کند. در الگوی جریان کنترل کشش تودرتو، سرویس ترکیبی یک سرویس مشارکتکننده را فراخوانی میکند که خودش ممکن است خدمات مشارکتکننده دیگری را فراخوانی کند. محاسبات به صورت سلسله مراتبی مدلسازی میشوند و هر نتیجه محاسباتی ممکن است نمودار فراخوانی را به سرویس ترکیبی منتقل کند. در الگوی جریان کنترل فشار تو در تو، سرویس ترکیبی یک سرویس مشارکتکننده را فراخوانی میکند که خود سرویس مشارکتکننده بعدی را در زنجیره فراخوانی میکند. آخرین سرویس شرکت کننده ممکن است هر گونه نتیجه محاسباتی را به سرویس ترکیبی ارسال کند. محاسبات به عنوان خط لوله مدلسازی میشوند که در آن سرویس ترکیبی اولین سرویس را در خط لوله راهاندازی میکند و آخرین سرویس در خط لوله ممکن است هر نتیجهای را به سرویس ترکیبی منتقل کند. هر دو الگوی تو در تو، مسئولیت های هماهنگی سرویس ترکیبی را ساده می کنند و زنجیره سازی را غیرشفاف تر می کنند. با این حال، آنها همچنین توانایی سرویس ترکیبی برای کنترل اجرا را محدود میکنند و پیچیدگیهایی را هنگام انتقال اطلاعات به سرویس ترکیبی، به عنوان مثال، مربوط به ابرداده یا استثناء، معرفی میکنند.
برای تنظیم شفافیت و کنترلی که کاربر انسانی در رابطه با زنجیره خدمات دارد، سه الگو قابل تشخیص است [ 43 ، 93 ] ( شکل 7).). در زنجیرهسازی هماهنگ با مشتری (شفاف)، کاربر در تعامل با مشتری ممکن است زنجیره خدمات را تعریف کند، اطلاعات کاملی از خدمات شرکتکننده داشته باشد و اجرای زنجیره خدمات و خدمات مشارکتکننده را کنترل کند. این الگو دید و کنترل کامل را برای کاربر ارائه می دهد، اما نیاز به دانش کامل از خدمات شرکت کننده و مشارکت عمیق دارد. در زنجیرهسازی (نیمه شفاف) با مدیریت گردش کار، کاربر در تعامل با مشتری از خدمات درگیر اطلاع دارد، اما یک سرویس مدیریت گردش کار ترکیبی را فراخوانی میکند که اجرای زنجیره خدمات را کنترل میکند. خدمات شرکت کننده ممکن است وضعیت اجرای خود را مستقیماً به مشتری ارائه دهند. این الگو تعادلی بین زنجیره شفاف و غیر شفاف در رابطه با شفافیت، کنترل و انعطاف ایجاد می کند. در زنجیره ایستا (مادر) با استفاده از خدمات کل، کاربر در حال تعامل با مشتری از خدمات شرکت کننده اطلاعی ندارد. آنها توسط یک سرویس ترکیبی پنهان می شوند که اجرای آنها را کنترل می کند. این الگو پیچیدگی های زنجیره ای را از کاربر پنهان می کند، اما انعطاف پذیری و کنترل کمتری را ارائه می دهد.
4.4. دیدگاه مهندسی
دیدگاه مهندسی بر “مکانیسم ها و عملکردهای مورد نیاز برای پشتیبانی از تعامل توزیع شده بین اشیاء در سیستم” تمرکز دارد [ 42 ].
دیدگاه مهندسی به معماری فیزیکی یک سیستم [ 42 ] مربوط می شود و شامل تصمیم گیری در مورد یکپارچه سازی فیزیکی خدمات است. معماری منطقی سیستم (بخش 4.3) به یکی از بسیاری از معماریهای فیزیکی ممکن (همچنین معماریهای استقرار) نگاشت شده است که از موجودیتهایی از جمله رایانههای شبکهای تشکیل شده است [ 93 ]]. توزیع خدمات از یک معماری منطقی لایه ای به یک معماری فیزیکی لایه ای منجر به تعریف تعدادی لایه فیزیکی (همچنین لایه های فیزیکی) می شود. سرویسهای روی یک لایه فیزیکی یا رایانه میتوانند از نظر فیزیکی با یکدیگر ادغام شوند (به عنوان مثال، مصرفکننده سرویس با استفاده از API ارائهدهنده خدمات که در آن هر دو روی یک CPU با استفاده از حافظه مشترک اجرا میشوند)، در حالی که سرویسها در لایههای فیزیکی یا رایانههای مختلف معمولاً از طریق یک ارتباط برقرار میکنند. شبکه. یکپارچه سازی فیزیکی خدمات می تواند کارایی یک سیستم را افزایش دهد (به عنوان مثال، با حذف سربار ارتباط یا فعال کردن بهینه سازی های بیشتر). با این حال، پتانسیل به اشتراک گذاری و استفاده مجدد از منابع ارائه شده توسط خدمات را نیز محدود می کند.93 ]. ادغام فیزیکی می تواند برای برآوردن الزامات تعاملی یک سیستم ضروری باشد، در حالی که جداسازی منطقی مناسب نگرانی ها را حفظ می کند. برای تسهیل این انتخاب، همه انواع خدمات باید امکان ادغام فیزیکی و توزیع را فراهم کنند.
علاوه بر این، دیدگاه مهندسی به طور کلی شامل تعیین پلت فرم محاسباتی توزیع شده مورد نیاز (DCP)، میان افزار و زیرساخت سیستم و مشخص کردن نحوه پشتیبانی سیستم از شفافیت های توزیع مورد نیاز است [ 42 ]. با این حال، این جنبه ها در محدوده SRA ارائه شده نیستند.
4.5. دیدگاه فناوری
دیدگاه فناوری بر انتخاب فناوری از جمله استانداردها تمرکز دارد [ 42 ]. این بخش یک نمای کلی از استانداردهای پشته فناوری، مدلهای داده، رمزگذاری دادهها و خدمات ارائه میدهد و نحوه ایجاد زنجیرههای خدماتی را توضیح میدهد که خطوط لوله تجسم تعمیمیافته را از مدلها و سرویسهای داده معرفی شده پیادهسازی میکنند. استانداردهای فن آوری ارائه شده مفاهیم دیدگاه های قبلاً شرح داده شده را با تمرکز بر خطوط لوله تجسم اثبات می کند.
پشته استانداردهای فناوری
جدول 2 نمای کلی یک پشته فناوری را ارائه می دهد و برای هر لایه مجموعه ای از استانداردها را فهرست می کند که هنگام ساخت 3DGeoVS بر اساس SSI مرتبط هستند. این SRA بر اساس، متخصص، گسترش و تکمیل مشخصات، از جمله مواردی که در زیر مجموعه مفاهیم و معماری فهرست شده است، است. زیر بخش زیر استانداردهای خدمات و داده ها را شرح می دهد. فناوری DCP، میانافزار و شبکه فهرستشده نشاندهنده فناوری مبتنی بر استفاده معمول است که در درجه اول اتصال و ارتباطات را تسهیل میکند و در عین حال شفافیتهای توزیع را فراهم میکند.
مدلها و کدگذاریهای داده
جدول 3 نمای کلی مجموعه ای از استانداردها و پیشنهادات مربوطه را ارائه می دهد که مدل های اطلاعات انتزاعی معرفی شده در دیدگاه اطلاعات را به تفصیل شرح می دهد (بخش 4.2). استانداردهای مختلف اضافی میتوانند نمای کلی را تکمیل کنند، به عنوان مثال، به فناوری پایه (مثلا XML)، مدلهای فرآیند (مانند مدل فرآیند کسبوکار و نمادگذاری (BPMN)، زبان اجرای فرآیند تجاری (BPEL)) یا از سری ISO 19100 مربوط میشوند. از استانداردها
با توجه به بازنمایی های مدل سه بعدی، ویژگی ها را می توان با استفاده از GML [ 97 ] یا WKT/WKB [ 98 ] برای ویژگی های جغرافیایی عمومی، CityGML [ 94 ] به عنوان طرحی کاربردی از GML برای V3DCM ها، IFC [ 99 ] برای داده های مدل اطلاعات ساختمان و IREps نشان داد. برای پوشش ها [ 100 ، 101 ]. نمودارهای صحنه سه بعدی را می توان با X3D [ 59 ] یا COLLADA [ 102 ] از حوزه گرافیک کامپیوتری یا KML [ 103 ] نشان داد.] از حوزه جغرافیایی. IREP ها را می توان با استفاده از فرمت های استاندارد، که می توانند بر اساس هدفشان گروه بندی شوند، کدگذاری کرد: کدگذاری تصاویر تک رنگ یا در مقیاس خاکستری (به عنوان مثال، JPEG)، رمزگذاری فشرده و رفع فشرده سازی توسط پردازنده های گرافیکی (مانند S3TC/DDS [ 104 ])، از جمله نمایش محدوده رنگی با دامنه دینامیکی بالا (به عنوان مثال، OpenEXR [ 105 ]) و نمایش تصاویر به صورت مش های مثلثی (به عنوان مثال، با استفاده از X3D [ 48 ، 59 ])، افزودن تصاویر با ویژگی های جغرافیایی (مثلاً، GeoTIFF) و رمزگذاری نماهای مرجع جغرافیایی در مدل های سه بعدی (به عنوان مثال، نمای مبتنی بر تصویر (IView) [ 7 ]).
با توجه به مشخصات مرحله، رمزگذاری فیلتر [ 89 ] فرد را قادر می سازد تا عبارات پرس و جو را برای فیلتر کردن ویژگی های رمزگذاری شده GML بیان کند. SLD/SE [ 58 ، 95 ] یک ظاهر طراحی دو بعدی و SLD3D/SE3D [ 23 ، 60 ، 62 ] استایل سه بعدی ویژگی های کدگذاری شده GML را تسهیل می کند. ISLD/ISE/ISA [ 7 ] استایلسازی سه بعدی IRepهایی را که بهعنوان IViews کدگذاری شدهاند، تسهیل میکند. زبان WCPS [ 100 ] بازیابی و پردازش پوشش های چند بعدی جغرافیایی را تسهیل می کند. برای مشخص کردن رندر، پارامترهای استانداردهای مختلف مجدداً مورد استفاده قرار می گیرند (به عنوان مثال، X3D [ 59 ]، KML [ 103 ]).
مفهوم IViews و ISLD/ISE/ISA مشارکت های نویسنده هستند و به طور رسمی در [ 7 ] معرفی شده اند. IView یک نمای جغرافیایی ارجاعشده و پیشبینیشده از یک مدل سهبعدی است که میتواند به صورت فهرستی از تصاویر (که با استفاده از فرمتهای فهرستشده در بالا رمزگذاری شدهاند)، مشخصات دوربین و دادههای بیشتر نمایش داده شود. ISLD/ISE/ISA زبانهای اعلانی و مختص دامنه برای استایل سه بعدی مبتنی بر تصویر IReps هستند.
خدمات
جدول 4 نمای کلی مجموعه ای از استانداردها و پیشنهادات مربوطه را برای خدمات ارائه می دهد. فهرست اجمالی برای هر لایه معماری SOA استانداردها و پیشنهادات رابط سرویس مربوطه. استانداردهای مختلف اضافی از کنسرسیوم فضایی باز (OGC) و سری استانداردهای ISO 19100 می توانند نمای کلی را تکمیل کنند.
لایه داده شامل خدماتی است که به داده ها مدیریت و دسترسی می دهد. یک سرویس کاتالوگ برای وب (CSW) ابردادههای مربوط به دادهها و خدمات را مدیریت میکند و از انتشار و جستجوی مجموعههای فراداده پشتیبانی میکند [ 108 ]. یک سرویس کاشی نقشه وب (WMTS) «نقشههای دادههای ارجاعشده مکانی را با استفاده از تصاویر کاشی با محتوای، گستردگی و وضوح از پیش تعریفشده ارائه میکند» [ 109 ]. علاوه بر این، لایه داده میتواند حاوی منابع داده مانند اسناد مشخصات مرحله یا فایلهای تصویری باشد که از طریق دسترسی به فایل HTTP/FTP قابل دسترسی هستند.
لایه عملکرد شامل خدماتی است که عملکردهای خاص دامنه را در سطح بالایی از انتزاع ارائه می دهد. یک سرویس نمایش تصویری از داده های جغرافیایی [ 19 ] را ارائه می دهد. یک WISS [ 7] یک سرویس نمایش سه بعدی برای داده های جغرافیایی است که IRPS های یک ظاهر را ارائه می دهد. خروجی IViews استایل از IViews ورودی و مشخصات استایل مبتنی بر تصویر ورودی. نمونههایی از سرویسهای زیر بسته به قابلیتهای یک نمونه سرویس خاص، میتوانند با لایه داده، لایه عملکرد یا هر دو مرتبط شوند. خدماتی برای پردازش دادههای عمومی (WPS)، دسترسی به ویژگیها و تراکنشهای آن (WFS)، دسترسی به پوششها (WCS)، دسترسی و پردازش پوششها (WCPS) و تصویر دوبعدی دادههای جغرافیایی در قالب نقشههای دوبعدی (WMS) وجود دارد. . یک W3DS یک سرویس نمایش سه بعدی برای داده های جغرافیایی است که نمودارهای صحنه را که نمایش های بصری سه بعدی از geodata را برای یک منطقه جغرافیایی معین نشان می دهد، خروجی می دهد [ 114 ]. A WVS [ 47 ، 48] یک سرویس نمایش سه بعدی برای داده های جغرافیایی است که IReps را به شکل IViews نمایش می دهد که نمایانگر مدل های سه بعدی متشکل از داده های جغرافیایی است.
سرویسها در لایه فرآیند با هماهنگ کردن سرویسها بر روی لایههای عملکرد و داده، پردازشها را به تصویر میکشند یا مشاهده میکنند. خدمات در لایه تعامل، رابط هایی را به کاربران انسانی یا سایر اجزای نرم افزار ارائه می دهند. هم برای فرآیند و هم برای لایه تعامل، هنوز هیچ پیشنهاد استاندارد سرویس اختصاصی وجود ندارد. با این حال، WPS عمومی می تواند خدمات را در هر لایه محصور کند. علاوه بر این، ما دو سرویس زیر را برای استفاده در لایه تعامل پیشنهاد می کنیم تا خدمات تعامل FMR * را پیاده سازی کنیم (بخش 4.3) که از تعامل پشتیبانی می کنند. WISS استایلینگ تعاملی را ارائه می دهد. یک سرویس نمای بدیع (NVS) [ 8 ] IReps را که نمایانگر نماهای جدید از IReps ورودی و مشخصات دوربین ورودی با استفاده از رندر مبتنی بر تصویر است، خروجی میدهد [ 83 ].
WVS، WISS و NVS پیشنهادهای استانداردسازی هستند که مشارکت نویسنده هستند و به ترتیب در نشریات اختصاصی [ 47 ، 48 ]، [ 7 ] و [ 8 ] به تفصیل معرفی شدهاند.
ایجاد خطوط لوله تجسم تعمیم یافته
استانداردهای معرفیشده برای دادهها و خدمات، امکانات مختلفی را برای ترکیب زنجیرههای خدماتی که خطوط لوله تجسم تعمیمیافته را پیادهسازی میکنند، فراهم میکند. این بخش فرعی بیشتر نمونههایی از انواع سرویسهای معرفیشده را دستهبندی میکند و سپس نشان میدهد که چگونه میتوان آنها را برای ایجاد خطوط لوله تجسم تعمیمیافته ترکیب کرد. چنین خطوط لولهای، سرویسهای Functional FMR * و Interaction FMR * معماری سرویس را اصلاح و اثبات میکنند (بخش 4.3).
به طور معمول، نمونه هایی از انواع خدمات می توانند در عملکرد ارائه شده در محدوده های تعیین شده توسط مشخصات مربوطه متفاوت باشند. جدول 5 نمونه های خدماتی از انواع سرویس های معرفی شده مناسب برای ترکیب خطوط لوله تجسم تعمیم یافته را که بر اساس مراحل اجرا شده، ورودی و خروجی متمایز شده اند، دسته بندی می کند. هر نوع نمونه سرویس با یک شناسه مشخص می شود که نوع سرویس، مراحل اجرا شده و انواع مدل سه بعدی ورودی و خروجی را نشان می دهد (به عنوان مثال، ویژگی WVS-MR→IRep ). انواع نمونه خدمات فهرست شده هر داده مدل سه بعدی ورودی و خروجی را تنها با یک نوع نشان می دهد. این منعکس کننده کنوانسیون استانداردها و پیشنهادات موجود است. با این حال، انواع نمونه خدمات اضافی برای WPS را می توان تصور کرد که از چندین نوع برای ورودی یا خروجی استفاده می کنند.
شکل 8 امکان ترکیب زنجیره های خدمات خطی را از انواع نمونه خدمات نشان می دهد ( جدول 5 ) که در آن هر زنجیره خدمات یک خط لوله تجسم تعمیم یافته را پیاده سازی می کند. هر زنجیره خدمات با دادههایی شروع میشود که با هر یک از انواع مدلهای سهبعدی معرفیشده نشان داده میشوند و با دادههایی که بهعنوان IRep مصرفشده توسط نمایشگر →IRep نمایش داده میشوند، پایان مییابد . انواع نمونه خدمات معرفی شده امکان ایجاد زنجیره های خدماتی با طول دلخواه را فراهم می کند. کوتاه ترین زنجیره خدمات ممکن یک IRep را ارائه و نمایش می دهد (به عنوان مثال، WVS-DFMR IRep → و Display → IRep). حالت های نمودار فقط انواعی را نشان می دهد که داده های مدل سه بعدی در هنگام مبادله بین سرویس ها نشان داده می شوند. در داخل و به ویژه هنگام اجرای مراحل خط لوله تجسم چندگانه، یک سرویس می تواند از انواع مختلف و دلخواه برای نمایش استفاده کند. با مقایسه انواع مدل های سه بعدی در نمودار، یک IRep را می توان به روش های همه کاره بیشتر پردازش کرد. یک IRep یا مستقیماً نمایش داده می شود، به یک IRep ارزش افزوده تبدیل می شود، به نمودار صحنه تبدیل می شود، به عنوان یک بافت برای استفاده به عنوان بخشی از نمودار صحنه تفسیر می شود، به مجموعه ای از ویژگی ها تبدیل می شود یا به عنوان یک ویژگی پوشش تفسیر می شود. از آنجایی که یک WPS فقط یک رابط عمومی برای عملکرد تعریف شده توسط کاربر تعریف می کند، یک WPS می تواند تبدیل های دلخواه را نشان دهد. این نمودار فقط امکانات ایجاد زنجیره خدمات خطی را نشان می دهد.
5. برنامه های کاربردی
این بخش نتایج به کارگیری SRA پیشنهادی و مفاهیم آن را برای طراحی، توصیف و تجزیه و تحلیل 3DGeoVS های نمونه توضیح می دهد. هدف ارائه شواهدی از مفهوم برای کاربرد و کاربرد SRA پیشنهادی و مفاهیم آن است. به عنوان نمونه 3DGeoVS، ما یک 3DGeoVS قابل ترکیب مبتنی بر SSI (بخش 5.1)، یک ترکیب CMV (بخش 5.2)، یک 3DGeoVS موجود به عنوان بخشی از یک SDI سه بعدی (بخش 5.3)، طیف وسیعی از سیستم های ناشی از ترکیب اجزا را ارائه می کنیم. سیستم های نرم افزاری متعدد به عنوان بخشی از آزمایش قابلیت همکاری (بخش 5.4) و پیاده سازی های صنعتی (بخش 5.5).
5.1. یک سیستم ژئوتصویرسازی سه بعدی قابل ترکیب بر اساس SSI
این بخش معماری یک نمونه اولیه 3DGeoVS را بر اساس SSI ( شکل های 9-11 ) ارائه می دهد [ 10 ، 47 ]. این معماری نتیجه بکارگیری SRA پیشنهادی برای طراحی یک سیستم ترکیب پذیر در حوزه هدف با الزامات پالایش شده از الزامات دامنه هدف عمومی منتشر شده در [ 10 ] است. معماری با دیدگاه های ارائه شده SRA (بخش 4) مطابقت دارد و آنها را به شرح زیر اعمال و اصلاح می کند.
دیدگاه سازمانی
هدف فنی اصلی این سیستم این است که چندین بیننده همزمان با دستگاه های مشتری محدود به منابع را قادر سازد تا با نمایش های بصری V3DCM های توزیع شده، عظیم و ایستا تعامل داشته باشند. به عنوان ویژگی های خاص، سیستم پشتیبانی می کند:
- نگرانی های مربوط به ایجاد سیستم و مشاهده داده های موجود،
- توزیع CV بین نویسندگان و بینندگان،
- IStyling به IStyling وابسته به view و IStyling مستقل از view برای پردازش کارآمدتر تفکیک شده است.
- دو پیکربندی کلاینت بیننده فیزیکی، که مصرف منابع دستگاه مشتری را با تعامل کنار میگذارد،
- پردازش و نقشه برداری کارآمد بافت های سطحی عظیم و منحصر به فرد (از جمله بافت های مدل ساختمان) و
- یک تکنیک ناوبری جدید که به عنوان تکنیک ناوبری سه بعدی کمکی و محدود (ACNavTech) که برای V3DCM ها مناسب است، برای کاربران مبتدی و متخصص مناسب است [ 9 ].
معماری ارائه شده به عنوان یک معماری پایه در نظر گرفته شده است که می تواند برای پشتیبانی از برنامه های کاربردی خاص (مانند خدمات شهری، گردشگری، سرگرمی) گسترش یابد. این سیستم بر ارائه تکنیکهای تعامل متناسب با V3DCM و ارائه نمایشهای بصری با کیفیت بالا و سبک انعطافپذیر از V3DCMهای عظیم و ایستا تمرکز دارد. این سیستم نگرانی های نویسنده را از نگرانی های مشاهده جدا می کند. تألیف شامل نقش نویسنده و موارد استفاده از آن، از جمله یک پیش پردازش آفلاین است که نمایش داده ای بهینه سازی شده برای رندر و پیمایش سه بعدی تعاملی ایجاد می کند. مشاهده شامل نقش بیننده، موارد استفاده از آن و یک فرآیند زمان اجرا تعاملی است که از داده های از پیش پردازش شده استفاده می کند.
این سیستم از هفت مورد استفاده ثانویه نقش بیننده به شرح زیر پشتیبانی می کند. برای انتخاب، بیننده یک ویژگی را با اشاره به آن انتخاب می کند و در نتیجه به صورت بصری ویژگی را برجسته می کند. برای پیمایش، بیننده میتواند با چرخاندن، چرخاندن، یا حرکت خودکار دوربین به یک ویژگی انتخابشده در نما یا از یک لیست از پیش تعریفشده، زاویه دید دوربین را کنترل کند. برای پیکربندی مجدد، بیننده می تواند دوربین را روی یک کره حول یک ویژگی انتخاب شده بچرخاند. برای فیلتر، بیننده میتواند با انتخاب لایههای ویژگی از یک لیست از پیش تعریفشده (مانند زمین، ساختمانها) و انتخاب یک سبک مبتنی بر تصویر از فهرست از پیش تعریفشده (مثلاً ارتفاع زمین یا تجسم مسیر) مجموعه ویژگیهایی را که باید به تصویر کشیده شود، کنترل کند. . برای رمزگذاری، بیننده می تواند با انتخاب یک سبک برای هر لایه ویژگی انتخاب شده، سبک نمایش بصری را کنترل کند (به عنوان مثال، orthophoto، map) و یک سبک مبتنی بر تصویر (به بالا مراجعه کنید) از لیست های از پیش تعریف شده. برای انتزاعی/کاملاً دقیق، مشتری زوم هندسی (اجرا شده با تغییر میدان دید دوربین)، نکات ابزاری برای نمایش اطلاعات اضافی درباره ویژگیهای انتخابی (که با بازیابی اطلاعات اضافی کدگذاری شده در GML برای یک ویژگی شناسایی شده با شناسایی شی آن (OID) اجرا میشود، ارائه میکند. )) و اندازه گیری فواصل اقلیدسی بین دو نقطه دلخواه در نما به عنوان عملکرد تحلیل ساده (شکل 9 ). برای اتصال، نمایشگر سیستم را می توان با نمایشگرهای اضافی ترکیب کرد تا پیکربندی های CMV ایجاد شود (مثلاً به عنوان بخشی از یک ترکیب همانطور که در بخش 5.2 ارائه شده است). برای کنترل دوربین، مشتری مجموعهای از تکنیکهای ناوبری استاندارد (مثلاً حرکت، زوم، مدار) و یک تکنیک ناوبری بهعنوان ACNavTech متناسب با V3DCM ارائه میکند.
این سیستم از سه مورد استفاده از نقش نویسنده به شرح زیر پشتیبانی می کند. برای تعریف سیستم، نویسنده می تواند نمونه های سرویس توزیع شده موجود را پرس و جو کرده و برای ارائه خدمات تعیین شده در خط لوله تجسم از پیش تعریف شده سیستم (به زیر مراجعه کنید) انتخاب کند. برای پیکربندی سیستم، نویسنده میتواند اسناد مشخصات مرحله را برای هر سرویس تشکیلشده، از جمله تعاریف فهرستهایی که در مشتری بیننده برای ویژگیهای مورد علاقه، لایهها و سبکهای ویژگی و سبکهای مبتنی بر تصویر به بیننده ارائه میشود، مشخص کند. برای مدیریت دادهها، نویسنده میتواند پیشپردازش دادهها را آغاز کند که دادههای پیشپردازششده فعلی را با دادههای پیشپردازششده جدید بازنویسی میکند. این سیستم از مدیریت داده های منبع پشتیبانی نمی کند، اما می تواند برای این منظور گسترش یابد.
دیدگاه اطلاعاتی
علاوه بر انواع دادههای معرفیشده در بخش 4.2، سیستم از یک نوع مشخصات مرحله اختصاصی برای پیکربندی پردازش پیشپردازش و زمان اجرا سرویسهای ACNavTech و انواع دادههای اختصاصی برای دادههای پیکربندی Client و Viewer Client استفاده میکند.
دیدگاه محاسباتی
شکل 10 نمای کلی از معماری نرم افزار منطقی را نشان می دهد. در ادامه خدمات سیستم و روابط آنها، ارتباط آن با CV و CMV و استفاده از الگوهای زنجیره خدمات را شرح می دهیم.
این معماری را می توان به طور کلی به پنج بخش تقسیم کرد: مشتری مشتری، پیش پردازشگر، مشتری نمایشگر، مولد نمای سبک و خدمات داده. Author Client یک رابط کاربری گرافیکی برای قابلیت استفاده نویسنده ارائه می دهد. می تواند کاتالوگ را برای نمونه های خدمات موجود جستجو کند و مشخصات مرحله را برای سیستم به طور مرکزی در فروشگاه مشخصات مرحله مدیریت کند.
پیش پردازنده نمودارهای صحنه را از داده های جغرافیایی منبع بهینه سازی شده برای رندر سه بعدی کارآمد و مناسب برای پشتیبانی از ACNavTech تولید می کند. سرویس تابعی فرآیند نویسنده، پیش پردازش را هماهنگ می کند. این سرویسهای Preprocessor (تا حدی موازیشده) را فراخوانی میکند تا ژئوداده منبع را به ژئوداده از پیش پردازش شده پایدار تبدیل کند. خدمات Terrain Mapping و CityGML Mapping سلسله مراتب نمودار صحنه کاشیشده را به ترتیب از دادههای Terrain Store و CityGML Feature/Texture Store ایجاد میکنند. سرویس Texture Preprocess بافت کاشی های نمودار صحنه CityGML را برای رندرگیری کارآمدتر با مرتب کردن آنها در یک اطلس بافت مجازی چند وضوحی بازسازی می کند [ 119 ]]. سرویس ACNavTech Preprocess یک نمودار صحنه موجود را با اطلاعاتی که Viewer Client در زمان اجرا برای پیمایش مورد سوء استفاده قرار می دهد، تقویت می کند. این به طور خودکار یک سلسله مراتب ناوبری معنایی و چند مقیاسی را برای یک V3DCM معین ایجاد می کند و این سلسله مراتب را به عنوان OID های ذخیره شده در نمودار صحنه و بافت های ارجاع شده رمزگذاری می کند. دادههای OSM، دادههای CityGML را با تعاریف دقیق ویژگیهای ساختاری (به عنوان مثال، خیابانها، مرزهای اداری) تکمیل میکنند.
Viewer Client یک رابط کاربری گرافیکی برای عملکرد مورد استفاده بیننده ارائه می دهد و به بیننده اجازه می دهد تا با نماهای سبک 3DGeoVE تعامل داشته باشد. Viewer Controller بخش کنترل کننده تکنیک های تعامل و ناوبری را پیاده سازی می کند. فرآیند Viewer بخش زمان اجرا خط لوله تجسم را هماهنگ می کند. برای این کار، برای مشخصات دوربین فعلی، یک IView را از سرویس Novel View یا Styled View Generator بازیابی می کند. اگر سروری رندرینگ را برای تسکین کلاینت انجام دهد، سرویس Novel View که در سمت کلاینت قرار گرفته است، IView های جدید با تأخیر کم از IViews بازیابی شده به صورت ناهمزمان با تأخیر بالا از مولد سمت سرور تولید می کند. ACNavTech Overlay یک IView تولید می کند که به عنوان یک پوشش دو بعدی عمل می کند تا در بالای نمای ایجاد شده مستقل برای پشتیبانی از ناوبری نمایش داده شود. سرویس IStyling View Dependent IVew را که نمای فعلی را با IStyling وابسته به view، روکش ناوبری و عناصر همپوشانی GUI اضافی نشان می دهد، تقویت می کند. در نهایت، IView افزوده شده به صفحه نمایش داده می شود.
Styled View Generator به عنوان بخشی از پردازش تعاملی زمان اجرا، IView های سبک را از داده های جغرافیایی از پیش پردازش شده تولید می کند. سرویس رندر سهبعدی، IViews را از نمودارهای صحنهای که قبلاً با استفاده از FStyling سبکدهی شدهاند و از فروشگاه کاشی Scene Graph بازیابی شدهاند، ارائه میکند. سرویس IStyling View Independent IViews را ارائه میکند که از سرویس رندر سهبعدی بازیابی شده و با IStyling مستقل از دید افزوده شدهاند. اگر از سرویس Novel View استفاده می شود، IStyling باید به یک سرویس مستقل از view (قبل از Novel View، به عنوان مثال، اعمال نور پراکنده) و یک سرویس وابسته به view (بعد از Novel View، به عنوان مثال، اعمال مه) تفکیک شود تا از نظر بصری نتایج صحیحی به دست آید. . این به این دلیل است که یک سرویس Novel View از IViews ذخیرهشده محلی گرفتهشده از دیدگاههای خاص برای تولید IViewهای جدید از دیدگاههای مختلف دوباره استفاده میکند.
این سیستم CV توزیع شده را ارائه می دهد (بخش 4.3) که در آن نویسنده و نقش کاربر بیننده داده ها و خدمات را به اشتراک می گذارند. از آنجایی که هیچ کنترلی مشترک نیست، در این مورد نیازی به سرویس هماهنگ کننده نیست. این سیستم CMV (بخش 4.3) را ارائه نمی دهد، اما می تواند برای این منظور مجددا استفاده یا گسترش یابد (بخش 5.2).
این معماری سه مجموعه خدمات زنجیرهای مجزا را نشان میدهد که الگوهای زنجیرهای متفاوت (بخش 4.3) را برای اهداف مختلف اعمال میکنند. در مونتاژ اول به عنوان بخشی از پیش پردازش، از الگوی ارسال مداوم داده برای ذخیره سازی منبع و داده های جغرافیایی پیش پردازش شده استفاده می شود. الگوی جریان کنترل کشش تودرتو (پیش پردازشگر منبع جغرافیایی را فراخوانی میکند) و فشار (پیشپردازنده، دادههای پیشپردازش شده را فراخوانی میکند) برای تراز کردن کنترل و جریان داده برای پردازش کارآمدتر و به دلیل منعکسکننده ویژگیهای رابطهای سرویس داده شده استفاده میشود. الگوی زنجیرهای شفاف با Author Process Functional به عنوان سرویس ترکیبی برای خودکارسازی و جداسازی اجرای فرآیند و در عین حال بازخورد اجرای نویسنده به کار میرود. در مونتاژ دوم به عنوان بخشی از پردازش زمان اجرا، فرآیند Viewer به عنوان یک سرویس ترکیبی از یک الگوی انتقال داده با واسطه و الگوی جریان کنترل واسطه ای عمل می کند تا در صورت لزوم، تماس های سرویس را از نتایج فراخوانی سرویس تنظیم کند. فرآیند نمایشگر به عنوان یک سرویس ترکیبی از الگوی زنجیره ای مات عمل می کند تا ترکیب سرویس و جزئیات اجرا را از بیننده پنهان کند. در مونتاژ سوم به عنوان بخشی از پردازش زمان اجرا، سرویسهای Novel View و ACNavTech Overlay الگوی انتقال مستقیم داده و الگوی جریان کنترل تودرتو را اعمال میکنند.به عنوان مثال ، تماس های سرویس تودرتو در تماس های سرویس) برای انتقال کارآمد داده ها.
دیدگاه مهندسی
نمودار استقرار در شکل 11نگاشت معماری نرم افزار منطقی به معماری فیزیکی را به تصویر می کشد. نگاشت مصنوعات نرم افزاری به دست آمده از خدمات را به دستگاه های سخت افزاری و محیط های اجرای نرم افزار اختصاص می دهد. مصنوعات به شش دستگاه اختصاص داده می شوند: Author Client، Viewer Client Light، Viewer Client Medium، Authoring Server، Viewer Server و Data Server. دستگاه Viewer Server حاوی پردازندههای گرافیکی است که پردازش سختافزاری را به Styled View Generator ارائه میدهند. سرور نویسنده نیازی به GPU ندارد. سرور Viewer به صورت فیزیکی ژئوداده از پیش پردازش شده را ادغام می کند تا سربار ارتباط بین Styled View Generator و Geodata از پیش پردازش شده را کاهش دهد. Viewer Client Light و Viewer Client Medium دو پیکربندی متفاوت هستند.8 ]. Viewer Client Light منابع محاسباتی کمتری را ارائه می دهد. با استفاده از یک سرویس Novel View محلی و Styled View Generator در سرور Viewer برای بازیابی IViews، پردازش را از مشتری به سرور به قیمت کاهش تعامل انجام میدهد. در مقابل، Viewer Client Medium به صورت فیزیکی یک Styled View Generator را ادغام می کند.
دیدگاه فناوری
فناوری های مختلفی را می توان برای پیاده سازی خدمات سیستم مورد استفاده مجدد قرار داد. به عنوان مثال، OGC فهرستی از پیاده سازی ها و محصولات مطابق با OGC را نگه می دارد [ 120 ]. جنبه های فناوری WVS، WISS، NVS و ACNavTech پیشنهادی را می توان در انتشارات مربوطه یافت [ 7-9 ، 47 ، 48 ] .
5.2. Mashup چند نمایش هماهنگ
ما یک معماری دوم از نمونه اولیه 3DGeoVS را بر اساس SSI ارائه می کنیم ( شکل های 12 و 13 ) [ 10 ، 47]. این معماری استفاده مجدد و گسترش SRA و معماری ارائه شده در بخش 5.1 را برای ایجاد یک mashup مبتنی بر وب نشان می دهد که CMV را درک می کند و داده های جغرافیایی و خدمات سازمان های مختلف را در لایه تعامل یکپارچه می کند. کلاینت مبتنی بر جاوا اسکریپت دو نمایشگر را به بیننده ارائه می دهد. اولین نمایشگر داخل بسته Google Maps Client نقشه های دو بعدی را با استفاده از Google Maps JavaScript API بازیابی شده از یک سرور Google Maps نمایش می دهد (به طور مفهومی یک خط لوله تجسم تعمیم یافته را در داخل پیاده سازی می کند). نمایشگر دوم در بسته Viewer Client نماهای پرسپکتیو سه بعدی بازیابی شده از یک Styled View Generator را نمایش می دهد. هر دو نمایشگر مدلهایی از یک منطقه جغرافیایی مشابه را نشان میدهند، اما دادهها و عملکرد زیربنایی برای تولید تصاویر نمایش داده شده کاملاً از هم جدا هستند. رویدادهای ورودی از هر یک از نمایشگرها به Coordinator منتقل می شوند. سپس Coordinator هر دو نمایشگر را با ترجمه فعل و انفعالات روی یک نمایشگر (مثلاً حرکت دادن دیدگاه یا انتخاب ویژگی ها) به تغییرات قابل مشاهده در نمایشگر دوم، همگام می کند.
5.3. توصیف و تحلیل یک سیستم موجود
در این بخش، ما از SRA پیشنهادی برای توصیف و تحلیل یک سیستم موجود مستند شده در ادبیات و از طریق منابع وب استفاده میکنیم ( شکل 14 ) [ 29 ، 33 ]. این سیستم نتیجه یک پروژه تحقیقاتی است که اهداف اصلی زیر را دنبال می کند: “پیاده سازی متقابل مدل های سه بعدی شهر، ایجاد زیرساخت های فضایی سه بعدی مورد نیاز، توسعه برنامه های کاربردی اولیه با استفاده از زیرساخت خدمات سه بعدی” و ادغام داده های OSM در یک سه بعدی SDI در مقیاس جهانی [ 29 ، 33 ]. این سیستم نشان دهنده تلاشی است که به طور مستقل و به موازات کار ارائه شده در این مقاله توسعه یافته است. موارد زیر دیدگاه های محاسباتی و سازمانی سیستم را خلاصه می کند.
دیدگاه سازمانی سیستم به طور کلی با دیدگاه SRA مطابقت دارد (بخش 4.1). ما بیشتر این سیستم (“سیستم B”) را با مقایسه آن با سیستم توصیف شده قبلی (“سیستم A”، بخش های 5.1 و 5.2) مشخص می کنیم:
- هدف فنی اصلی این سیستم این است که چندین بیننده همزمان را قادر سازد تا با نمایش های بصری V3DCM های توزیع شده، عظیم و ایستا تعامل داشته باشند. مشابه سیستم A، سیستم B نگرانیهای مربوط به نوشتن (از جمله پیشپردازش آفلاین) را از نگرانیهای مشاهده (از جمله پردازش زمان اجرا تعاملی) جدا میکند، بر نمایشهای بصری با سبک انعطافپذیر تمرکز میکند، تکنیکهای ناوبری استاندارد را ارائه میدهد و CMV را با یکپارچهسازی یک نمای کلی دوبعدی تحقق میبخشد. نقشه
- برخلاف سیستم A، سیستم B تکنیکهای ناوبری متناسب با V3DCM، IStyling، یک پیکربندی کلاینت بیننده فیزیکی که مصرف منابع مشتری را با رندر خارج از بارگذاری در سمت سرور کاهش میدهد، و بافتسازی سطح عظیم و منحصر به فرد برای ساختمانها را ارائه نمیدهد.
- برخلاف سیستم A، سیستم B FStyling را بهعنوان بخشی از پردازش زمان اجرا (بهجای بخشی از پیشپردازش با مجموعهای ثابت از سبکها برای انتخاب در زمان اجرا)، برچسبگذاری ویژگیها، ادغام منابع داده اضافی (مانند حسگرها، مسیرها) و عملکرد اضافی بیننده. سیستم B از موارد استفاده از نقش بیننده از طریق عملکردهای اضافی بیننده پشتیبانی می کند: اشاره به یک مکان نشانی پستی آن را نشان می دهد (چکیده/مختص). با وارد کردن آدرس پستی، دوربین به مکان مربوطه از راه دور منتقل می شود (ناوبری). انتخاب دستههای صفحات زرد، نقاط مورد علاقه را در فضا (فیلتر) نشان میدهد. انتخاب دادههای اضافی، مانند دادههای حسگر (مانند دما، هشدار دود) یا مسیرهای GPS دادههای مربوطه (فیلتر) را نمایش میدهد. مسیرهای شبکه خیابان را می توان محاسبه و نمایش داد (اتصال).
از دیدگاه محاسباتی، پردازش را می توان به نگارش، از جمله پیش پردازش، و مشاهده، از جمله پردازش زمان اجرا تعاملی تقسیم کرد ( شکل 14).). ساختار کلی بسیار شبیه به ساختار سیستم A است. تابع فرآیند نویسنده پیش پردازنده را کنترل می کند تا داده های منبع زمین را به داده های زمینی از پیش پردازش شده برای مصرف توسط خدمات Web 3D و Web Mapping تبدیل کند. Map 3D Client به کاربران اجازه می دهد تا با نماهای سبک شده تعامل داشته باشند و فرآیندهای بیننده را هماهنگ کنند. سرویس زیرمجموعه و فیلتر یکپارچه سازی اطلاعات افزایشی را فراهم می کند. خدمات Terrain Tile Generator و Building Generator کاشی های نمودار صحنه را تولید می کنند. Labeling Generator برچسب های ویژگی را به صورت نمودار صحنه کدگذاری می کند. Map 3D Client نمودارهای صحنه را از لایه عملکردی بازیابی می کند (برخلاف سیستم A که IViews را بازیابی می کند).
با خلاصه مقایسه سیستم B با سیستم A، هر دو سیستم اهداف اصلی مشابهی دارند و بر اساس SOA و استانداردها (“SS” SSI) هستند. بنابراین، معماری آنها شباهتهای اصلی دارند. با این حال، سیستم B از IReps و پردازش آنها همانطور که در این کار بحث شده است (“I” از SSI) پشتیبانی نمی کند. بنابراین، سیستم B از پتانسیل IStyling استفاده نمی کند. به عنوان مثال، در سیستم B، اعمال یک سبک با استفاده از خطوط کانتور نیازمند بازسازی و انتقال تمام کاشیهای نمودار صحنه مربوطه (با استفاده از FStyling) است [ 60 ، 62 ]. در مقابل، در سیستم A، اعمال چنین سبکی به صورت موقت بر روی یک تصویر رندر شده بلافاصله قبل از نمایش و با استفاده از IStyling کارآمدتر انجام می شود [ 7 ]]. علاوه بر این، سیستم B از کلاینت های سبک وزن از طریق رندر سمت سرور (رابط WVS) و ایجاد نماهای جدید در سمت کلاینت (واسط Novel View) به شیوه ای سرویس گرا و قابل همکاری پشتیبانی نمی کند. بنابراین، مشتریان باید قادر به ارائه نمودارهای صحنه بالقوه حجیم باشند. قابلیت همکاری با ذخیره داده های جغرافیایی از پیش پردازش شده در قالب های اختصاصی در پایگاه های داده رابطه ای و با ارائه پیش پردازش نقشه از طریق WPS به جای رابط های W3DS، مانع می شود. بعلاوه، استفاده از الگوی انتقال مداوم داده با واسطه توسط سرویس های پیش پردازش ممکن است عملکرد را محدود کند. هر دو سیستم در پشتیبانی از ویژگی های خاص، به عنوان مثال، تکنیک های ناوبری، بافت، یا برچسب گذاری متفاوت هستند. چنین ویژگی هایی الزامات رایج برای 3DGeoVS ها هستند و پشتیبانی آنها به طور متقابل یکدیگر را در یک 3DGeoVS مبتنی بر SSI حذف نمی کند.
5.4. آزمایشهای قابلیت همکاری تصویر سه بعدی
مجموعهای از آزمایشها که در پروژه آزمایشی قابلیت همکاری تصویر سه بعدی [ 34 ] انجام شد، قابلیت همکاری و اثبات مفهوم عناصر SRA پیشنهادی را نشان میدهد. نه سازمان از دانشگاه و صنعت این پروژه را برای آزمایش و نشان دادن رویکردهای مختلف برای تصویر سه بعدی سرویس گرا با تمرکز بر پیشنهادات W3DS و WVS انجام دادند. این آزمایشها از پیادهسازیهای پیشپردازنده دادههای جغرافیایی، WVS و مشتریان بیننده استفاده میکنند که در طول این کار توسعه داده شدهاند. این آزمایشها مجموعههای دادههای دنیای واقعی را با ترکیبی از خدمات و مشتریان از ده سیستم نرمافزاری مختلف برای کاربرد عمومی برنامهریزی شهری آزمایش کردند.
به عنوان نتایج، آزمایشها با موفقیت آزمایش و راهاندازی 3DGeoVSs بر اساس W3DS و WVS را نشان دادند. به طور خاص، آزمایشها ادغام V3DCMهای پیچیده و دقیق کدگذاریشده بهعنوان دادههای CityGML یا OSM در سرورهای مختلف W3DS و WVS و تحویل به کلاینتهای بیننده مختلف را که بهعنوان برنامههای بومی یا مبتنی بر وب روی رایانههای شخصی یا دستگاههای تلفن همراه اجرا میشوند، نشان داد. آزمایشها درجه بالایی از قابلیت همکاری بین سیستمهای بکار گرفته شده را با استفاده از استانداردها و پیشنهادات مربوطه نشان دادند. با این حال، آزمایشها مسائل مربوط به قابلیت همکاری جزئی و مسائل مفهومی را در پیادهسازیها و مشخصات آزمایششده نشان داد. نتایج نشان میدهد که بحث و آزمایش بیشتر جامعه (به عنوان مثال، در مورد مکانیسمهای کاشی کاری، تخصیص OID) میتواند پیشنهادهای W3DS و WVS را قبل از استانداردسازی نهایی بهبود بخشد.
5.5. پیاده سازی های صنعت
پیاده سازی صنعتی WVS و NVS پیشنهادی شواهدی از مفهوم و اشاره به ارتباط عملی آنها ارائه می دهد. شرکتهای Autodesk Inc. و Bentley به طور مستقل خدمات رندر سه بعدی و مشتریان بیننده را بر اساس پیشنهادات WVS و NVS پیادهسازی کردند. پیاده سازی ها به ترتیب در محصولات Autodesk LandXplorer [ 121 ] (اکنون توسط Autodesk InfraWorks جایگزین شده است) و Bentley Geo Web Publisher [ 122 ] یکپارچه شده اند. هر دو پیاده سازی ناشی از همکاری فوری بین نویسنده و شرکت ها است.
6. ارزیابی و بحث
این بخش SRA پیشنهادی، 3DGeoVSs معرفی شده به عنوان کاربردهای SRA پیشنهادی و رویکرد کلی ساخت 3DGeoVSs بر اساس SSI را ارزیابی و بحث میکند. هدف کمک به پاسخ به سؤالات زیر است که هر کدام در یکی از زیربخش های زیر به آن پرداخته می شود:
- آیا SRA از طراحی، توصیف و تجزیه و تحلیل 3DGeoVS بر اساس SSI به طور موثر و کارآمد پشتیبانی می کند (بخش 6.1)؟
- آیا SRA از بهره برداری از پتانسیل های SSI (بخش 1) هنگام طراحی 3DGeoVS بر اساس SSI (بخش 6.2) پشتیبانی می کند؟
برای پاسخ به سوال اول، مجموعه سیستم هایی را بررسی می کنیم که SRA می تواند روی آنها اعمال شود ( شکل 15 ، مجموعه B ) با استفاده از یک چارچوب ارزیابی موجود [ 84 ]. برای سوال دوم، مجموعه سیستمهای سوال قبلی را بررسی میکنیم که بر اساس SSI به 3DGeoVSs محدود شدهاند ( شکل 15 ، مجموعه C = B∩ D ) با استفاده از پتانسیلهای شناساییشده برای SSI (بخش 1).
6.1. اثربخشی و کارایی
هدف این بخش ارزیابی این است که آیا SRA از طراحی، توصیف و تحلیل 3DGeoVS بر اساس SSI به طور موثر و کارآمد پشتیبانی می کند یا خیر. برای این کار، SRA در پنج مورد نمونه اعمال میشود (بخش 5) و ما با استفاده از چارچوب ارزیابی موجود برای مدلهای مرجع [ 84 ]، SRA را بهطور انتقادی منعکس کرده و تجزیه و تحلیل میکنیم تا یک ارزیابی اولیه و اولیه به دست آوریم. این بخش کاربردهای SRA را به عنوان اثبات مفهوم، ارزیابی SRA با استفاده از چهار دیدگاه ارزیابی، بحث در مورد اثربخشی SRA مورد بحث قرار می دهد و با نتیجه گیری پایان می یابد.
با خلاصه کردن پنج کاربرد SRA (بخش 5)، اینها اثبات مفهومی را برای جنبهها و کاربردهای زیر از SRA ارائه میکنند. برنامه ها طراحی، توصیف، تجزیه و تحلیل و مقایسه 3DGeoVS ها بر اساس SSI و SS با جنبه هایی از جمله CV و CMV را نشان می دهند. علاوه بر این، برنامه ها مفاهیم WVS، W3DS و NVS، قابلیت همکاری مشخصات مربوطه و پیاده سازی نمونه اولیه و کاربرد عملی، صنعتی و ارتباط آنها را نشان می دهند. انتشارات اختصاصی شواهد اضافی از مفاهیم، پیاده سازی ها، کاربردها بر روی داده های دنیای واقعی و ارزیابی های WVS [ 47 ، 48 ]، WISS [ 7 ]، NVS [ 8 ] و خدماتی برای فعال کردن ناوبری سه بعدی با بهره برداری از IReps [ 9 ] ارائه می کنند.
جدول 6 نتایج یک بازتاب انتقادی SRA را با استفاده از چهار دیدگاه ارزیابی و معیارهای مشتق شده خلاصه می کند [ 84]. بهعنوان ویژگیهای اساسی SRA، ما به طور مثبت ارزیابی میکنیم که در حال حاضر هیچ SRA دیگری وجود ندارد که به همان چالشها رسیدگی کند و مفاهیم و تکنیکهای اثباتشده، استاندارد، رایج و پیشرفته را به شیوهای باز و مستقل از فناوری ترکیب و به هم مرتبط میکند. در حالی که از بیان خط لوله تجسم سنتی فراتر می رود. ما خنثی ارزیابی می کنیم که SRA به دلیل ماهیت جزئی و عمومی آن به تلاش بیشتری برای استقرار نیاز دارد و در حال حاضر با توجه به گسترش و تعهد سازمانی و صنعتی محدود است. ما امتیاز منفی می دهیم که استفاده از SRA مستلزم مشخص کردن جزئیات پیاده سازی فراتر از طراحی خط لوله تجسم (به عنوان مثال، کنترل دقیق و جریان داده، بهینه سازی)، فاقد استانداردسازی SRA و مفاهیم اصلی (مانند WVS، WISS) و معرفی سربار از طریق توزیع است.
ما بیشتر اثربخشی SRA را با بررسی کلاسهایی از سیستمهایی که SRA میتواند یا نمیتواند روی آنها اعمال شود، بررسی میکنیم ( شکل 15 ):
- آیا می توان SRA را بر اساس SSI روی 3DGeoVS ها اعمال کرد ( یعنی C 6 = ∅ است )؟ بله، همانطور که اثبات کاربردهای مفهومی (بخش 5) و ساخت SRA نشان می دهد. SRA برای 3DGeoVS ها اعمال می شود زیرا سیستم هایی را برای تجسم تعاملی داده های جغرافیایی ارائه شده در فضای دکارتی سه بعدی پوشش می دهد. SRA از آنجایی که عناصر مفهومی تعیین کننده یک SOA را به کار می گیرد (سرویس گرا دامنه برنامه-همترازی IT، مفهوم سرویس، معماری مرجع SOA، [ 2 ، 123 ])، استانداردها را اعمال و پیشنهاد می کند و امکان بهره برداری از پتانسیل های آن را به SSI اعمال می کند. IReps با استفاده از WVS، WISS، NVS و سایر خدمات.
- آیا می توان SRA را برای همه 3DGeoVS های مبتنی بر SSI اعمال کرد ( یعنی B⊇ D است )؟ احتمالاً نه، زیرا بدون بررسیهای بیشتر نمیتوانیم سیستمی را بسازیم که بر اساس SSI واجد شرایط 3DGeoVS باشد، اما از مفاهیمی استفاده کند که با SRA در تضاد است.
- آیا میتوان SRA را برای سیستمهایی اعمال کرد که مبتنی بر SSI 3DGeoVS نیستند ( یعنی B ∩ D 6 = B است )؟ بله، همانطور که اثبات کاربرد مفهوم در بخش 5.3 نشان می دهد. این برنامه از پتانسیل های IReps فراتر از تولید تصاویر برای نمایش فوری استفاده نمی کند. به طور کلی، SRA را می توان برای زیر مجموعه ای از 3DGeoVS ها بر اساس SS (SSI بدون “I”) اعمال کرد. برای بهره برداری از پتانسیل IReps، یک سیستم باید از خدماتی استفاده کند که تولید می کنند (مانند WVS) و مصرف کننده IRPS (مانند WISS، NVS).
در نتیجه، نتایج نشان می دهد که SRA از طراحی، توصیف و تجزیه و تحلیل یک کلاس خاص از 3DGeoVS بر اساس SSI به طور موثر و کارآمد پشتیبانی می کند. علاوه بر این، نتایج نشان میدهد که استفاده از SRA پیشنهادی در مقایسه با جایگزینهای عدم استفاده از SRA یا ایجاد یک SRA جدید از ابتدا مفید است.
6.2. بهره برداری از پتانسیل های SSI
استفاده از اصول SSI در هنگام ساخت 3DGeoVS مزایای بالقوه ای را ارائه می دهد که در بخش 1 معرفی شد. هدف این بخش این است که به طور انتقادی منعکس شود که آیا SRA از بهره برداری از این پتانسیل ها هنگام طراحی 3DGeoVS بر اساس SSI پشتیبانی می کند یا خیر.
SOA
طراحی 3DGeoVS بهعنوان سیستم توزیعشده، مزایایی را که در برنامههای کاربردی در بخش 5 نشان داده شده است، ممکن میسازد. مزایا شامل اشتراکگذاری منابع، از جمله دادههای جغرافیایی، خدمات و ظرفیت محاسباتی، فعال کردن CV و دسترسی چند کاربره، بهبود کارایی زمان اجرا از طریق موازیسازی (مثلاً موازیسازی پردازش پیشپردازش و زمان اجرا) است. ، منطق برنامه و دسترسی به پایگاه داده) و کارایی هزینه از طریق استفاده از چندین کامپیوتر استاندارد ارزان قیمت برای اکثر وظایف. برنامه های کاربردی ارائه شده بهبود قابلیت اطمینان را نشان نمی دهند، اما فرضاً می توان برای این منظور گسترش داد. SOA پتانسیل ساخت و تطبیق 3DGeoVS ها را به شیوه ای کارآمد و چابک ارائه می دهد [ 2 ]. کاربرد مفاهیم SOA عنصری [ 2 ، 123] از بهره برداری از این پتانسیل به طرق مختلف پشتیبانی می کند.
- هم ترازی دامنه برنامه-IT منجر به خدماتی می شود که با دامنه تراز شده و روی آن تمرکز می کنند (به عنوان مثال ، تصویرسازی جغرافیایی سه بعدی) و از طراحی، توصیف و تجزیه و تحلیل سیستم ها به عنوان خطوط لوله تجسم پشتیبانی می کنند. با این حال، این فعالیتها به دلیل نیاز به نمایش جزئیات در سطح معماری فراتر از طراحی خط لوله تجسم مرتبط با، به عنوان مثال، جریان کنترل، جریان داده، تداوم و بهینهسازی، مانع میشوند. این فعالیتها بیشتر با تجمع درشت دانهای از مراحل خط لوله تجسم چندگانه در سرویسهای تقسیمناپذیر (مثلاً برای بهینهسازی مانند WISS-FMR * IRep→IRep ، یا برای کپسولهسازی اجزای قدیمی یا انتزاع زیرگرافهای خط لوله تجسم اختصاصی مانند ACNavTechprocess، مختل میشوند. بخش 5.1).
- مفهوم خدمات پتانسیل های مختلف را تسهیل می کند. ترجیحاً سرویسهای بدون حالت میتوانند برای استفاده یا پیادهسازی پیچیدگی کمتری داشته باشند (با سربار متوسط برای بهینهسازیهای پیادهسازی سرویس، مانند ذخیرهسازی در زمان استفاده، به عنوان مثال، برای اجرای نمونه اولیه WVS، WISS و NVS). خدمات منسجم و درشت میتواند عملکرد را بهبود بخشد (به عنوان مثال، مجموعه اجرای WISS، IStyling قابل برنامهریزی با یک فراخوانی [ 7 ]]). سرویسهای با اتصال آزاد را میتوان به راحتی ترکیب کرد (به عنوان مثال، جفت کردن یک نمونه WVS در زمان اجرا با مصرفکنندگان مختلف همزمان، بخش 5.4). سرویسهای رابطمحور پیادهسازی را از رابطی جدا میکنند که تبادل پذیری نمونهها و پیادهسازیهای سرویس را تسهیل میکند (به عنوان مثال، دسترسی به نمونههای W3DS و پیادهسازیهای مختلف از یک مصرفکننده، بخش 5.4). فرصتهایی برای استفاده مجدد و ادغام سرویسهای مختلف موجود و مؤلفههای پیادهسازی و فناوریها ایجاد میشود (به عنوان مثال، پیادهسازی سرویسهای مختلف همکاری با C++ و جاوا و استفاده مجدد از چارچوبهای موجود، مانند OpenSceneGraph و Java3D، به ترتیب، بخش 5.4) اجرا میشوند. با این حال، خدمات بدون تابعیت می تواند کمتر از خدمات دولتی کارآمد یا مؤثر باشد (بخش 5.
- معماری مرجع SOA ایجاد دیدگاه های معماری یکپارچه از سیستم ها را تسهیل می کند. بنابراین، به عنوان مثال، ما نشان دادیم که نمایش سیستمهای توسعهیافته مستقل از همان حوزه شرح دادهشده به ترتیب در بخشهای 5.1 و 5.3، با ابزارهای SRA یکسان، مقایسه آنها را آسانتر میکند و از شناسایی شباهتها و تفاوتها پشتیبانی میکند. علاوه بر این، معماری مرجع SOA ساختار را از طریق لایه بندی و زیر دامنه ها (به عنوان مثال، نوشتن و مشاهده زیر دامنه ها، بخش های 5.1-5.3) اجرا می کند.
- مدیریت فرآیند دامنه برنامه، مشخصات، انطباق و اجرای فرآیندها را تسهیل می کند. SRA پیشنهادی فقط تا حدی از مدیریت فرآیند و پتانسیلهای آن پشتیبانی میکند، به عنوان مثال، یک لایه فرآیند اختصاصی، الگوهای خدمات (مثلاً، فرآیند نمایشگر) و رابط WISS، از جمله زبانی برای تعیین فرآیندهای IStyling. با این حال، SRA فاقد یک نمایش صریح و مناسب برای خطوط لوله تجسم است که از جزئیات غیرمرتبط و غیر مرتبط (همانطور که در بالا ذکر شد) انتزاع کند.
- زیرساخت SOA شفافیت های توزیع و خدمات فنی مختلف را ارائه می دهد. SRA پیشنهادی زیرساختی را مشخص نمیکند و برنامههای کاربردی SRA فقط از یک زیرساخت اساسی و DCP استفاده میکنند که الزامات اساسی را بدون بررسی کاربردها و مزایای بیشتر برآورده میکند.
به طور خلاصه، SRA و کاربردهای آن مزایای بالقوه سیستم های توزیع شده و SOA را با محدودیت های جزئی پشتیبانی می کنند. برخی از جنبه ها، مانند مدیریت فرآیند و زیرساخت، کار بیشتری را می طلبد.
استانداردها
استانداردها پتانسیل بهبود قابلیت همکاری را با امکان جفت کردن سیستم ها به طور موثرتر و کارآمدتر ارائه می دهند. برنامه کاربردی در بخش 5.4 اثربخشی و کارایی جفت را برای زیرمجموعهای از SRA با جفت کردن مجموعههای داده، خدمات و پیادهسازیهای مختلف دنیای واقعی از سازمانهای مختلف به طور موثر با سربار کم نشان میدهد. با این حال، برای رابط های سرویس های مختلف، استانداردها در دسترس نیستند (مثلاً، فرآیند مشاهده، بخش 4.3) یا فقط پیشنهادات استاندارد (مثلاً، W3DS، WVS، WISS، یا NVS، بخش 4.3) یا استانداردهای با قابلیت همکاری ضعیف (مانند WPS، که فقط نحوی را فراهم می کند و قابلیت همکاری معنایی ندارد، بخش 4.3) موجود است. به عنوان مزایای بیشتر، ما قابلیت مقایسه سیستم را با مقایسه دو سیستم از بخشهای 5.1-5.3 نشان میدهیم.120 ]). ادغام و استفاده مجدد از نمونه ها و پیاده سازی های سرویس شخص ثالث موجود (بخش 5.4) خدمات برون سپاری را نشان می دهد. استقلال پلتفرم در محدوده پلتفرم های مختلف مورد استفاده برای اجرای خدمات برنامه ها مشهود است (بخش 5).
IRPS
IReps خواص مفید مختلفی را نشان می دهد که می تواند برای کاربردهای مختلف مورد بهره برداری قرار گیرد [ 7-9 ، 47 ، 48 ] .
- IReps میتواند به عنوان نمایشهایی یکپارچه و جداکننده (به عنوان مثال، یکپارچهسازی و طراحی دادههای جغرافیایی که بهعنوان IReps در ACNavTech Preprocess و WISS ارائه میشوند بدون توجه به منبع و ذخیرهسازی، نمایش، پردازش و رندر قبلی) و حساس به خروجی (به عنوان مثال، الزامات ذخیرهسازی تصویر با بالا بسته به وضوح و زمان اجرای پردازش WISS ISStyling تا حد زیادی مستقل از محتوای تصویر). آنها می توانند برای تولید، پردازش و ذخیره بر روی پردازنده های گرافیکی کارآمد باشند (به عنوان مثال، همانطور که توسط پیاده سازی های WVS و WISS نشان داده شده است)، می توانند آسان تر به دست آیند، مدیریت شوند و رندر شوند (مثلاً استفاده از عکس ها به عنوان بافت برای زمین و ساختمان ها در V3DCM). IReps می تواند تنها گزینه برای پردازش زمانی باشد که توضیحات منبع مدل ها در دسترس نیست (به عنوان مثال، نمونه های WISS IStyling [ 7 ]).
- با این حال، اگرچه استانداردهای موجود را می توان برای نشان دادن IReps مدل های سه بعدی استفاده کرد، اما آنها فاقد توانایی نمایش تمام ویژگی های مورد نیاز (مثلاً مشخصات دوربین) به شیوه ای منطبق با استاندارد و یکپارچه هستند. هیچ استانداردی برای نمایش IView پیشنهادی موجود نیست. بنابراین، استانداردسازی آینده کدگذاری مناسب مورد نیاز است. علاوه بر این، IRep ها مستعد نمونه برداری از مصنوعات و نام مستعار هستند. IREPها با توجه به مدل منبعی که اثربخشی پردازش را محدود می کند، ناقص هستند. فعال کردن تعامل با IReps می تواند چالش برانگیز باشد. راندمان ذخیره سازی و پردازش IReps در مقایسه با سایر نمایش ها به طور قابل توجهی به پیچیدگی مدل ارائه شده بستگی دارد و می تواند برای مدل های کمتر پیچیده پایین تر باشد.
- چندین برنامه بهره برداری از IReps را نشان می دهند. ما یک خط لوله تجسم توزیع شده را مورد بحث قرار می دهیم که در آن یک NVS سمت کلاینت نماهای جدیدی از IReps بازیابی شده از یک WVS سمت سرور برای بهبود کارایی سمت مشتری، جداسازی و استقلال پلت فرم ایجاد می کند. WISS یک استایلینگ جداشده، حساس به خروجی، موثر و کارآمد را ارائه میکند که از تکنیکهای پردازش تصویر موجود استفاده میکند. ACNavTech از IReps به روشی کارآمد و حساس به خروجی برای یکپارچهسازی دادههای جغرافیایی و استفاده مجدد از تکنیکهای پردازش تصویر قوی، تولید پوششهای نمایشگر از یک IReps، و تحلیل مدلهای سه بعدی برای تسهیل حرکت دوربین در مدل سهبعدی و ارزیابی نماها برای بهترین استفاده میکند. مشاهده انتخاب
در نتیجه، نتایج نشان می دهد که SRA به طور قابل توجهی از بهره برداری از پتانسیل های SSI پشتیبانی می کند. با این حال، نتایج همچنین محدودیتهایی را نشان میدهند که مانع بهرهبرداری از پتانسیلهای SSI میشوند و کار آینده را میطلبند. چنین محدودیت هایی شامل مدیریت فرآیند SOA و سطح عمومی انتزاع برای تجسم بهینه نیست، فقدان استاندارد برای مفاهیم اصلی مختلف، و تعامل و کارایی محدود هنگام استفاده از IReps به عنوان نمایشی برای انتقال یک مدل سه بعدی از سمت سرور به مشتری است. -سمت.
7. نتیجه گیری
معماری نرمافزار یک 3DGeoVS و مدل تجسم زیربنایی آن، ویژگیهای کیفی آنها را منعکس میکند و از فعالیتهای مختلف چرخه حیات سیستم پشتیبانی میکند. در این مقاله، مدل خط لوله تجسم تعمیم یافته، یک SRA برای 3DGeoVS ها بر اساس SSI، کاربردهای SRA و ارزیابی و بحث در مورد SRA و کاربردهای آن را معرفی کردیم. مدل خط لوله تجسم تعمیمیافته پیشنهادی پایهای مناسب برای ساخت معماریهای نرمافزاری 3DGeoVS بر اساس SSI است. این محدودیتهای بیانی رایج و اثباتشده مدل خط لوله تجسم را تعمیم میدهد و بر آن غلبه میکند، بهویژه با توجه به تبدیل IReps. برای تسهیل بهره برداری از IReps، نوع پیشنهادی IVew و انواع خدمات، WVS، WISS و NVS، بلوک های سازنده و بخش های جدایی ناپذیر SRA هستند که از تامین، پشتیبانی می کنند. استایل و تعامل با IReps به ترتیب. علاوه بر این، تکنیک ناوبری پیشنهادی برای V3DCM ها یک برنامه کاربردی از SRA است که از تعامل پشتیبانی می کند. SRA پیشنهادی یک معماری نرم افزار قالب عمومی برای 3DGeoVS ها بر اساس SSI است. SRA مفاهیم و فنآوریهای اثباتشده موجود و مشارکتهای جدید، مانند مدل خط لوله تجسم تعمیمیافته را بهعنوان پایه و مکانیسمهایی برای بهرهبرداری از IReps یکپارچه میکند. برای زیرمجموعه خاصی از 3DGeoVS ها بر اساس SSI و زیر مجموعه خاصی از 3DGeoVS ها بر اساس SOA و استانداردها قابل استفاده است. این کار بر اساس استانداردهای جاری، رسمی، منتشر شده و پیشنهادات استانداردسازی است و استانداردهای جدید و پیشرفت استانداردها و پروپوزال های موجود را پیشنهاد می کند. نتایج این کار برای کمک به استانداردهای فعلی و آتی توسط OGC در نظر گرفته شده است.
برنامه ها با طراحی، توصیف و تجزیه و تحلیل سیستم های تصور شده و موجود از دانشگاه و صنعت، شواهد مفهومی را برای کاربرد عمومی و کاربرد SRA نشان می دهند. نتایج ارزیابی نشان می دهد که SRA به طور قابل توجهی از چنین فعالیت هایی به طور موثر و کارآمد پشتیبانی می کند و از بهره برداری از پتانسیل های SSI پشتیبانی می کند. با این حال، ارزیابی همچنین محدودیت ها و چالش ها را نشان می دهد. سطح کلی انتزاع بهدستآمده توسط SRA به دلیل نیاز به تعیین جزئیات پیادهسازی فراتر از طراحی خط لوله تجسم در سطح معماری مربوط به، بهعنوان مثال، جریان کنترل، جریان داده، تداوم و بهینهسازیها، بهعنوان غیربهینه برآورد میشود. به ویژه، SRA فاقد یک صریح، نمایش و مدیریت فرآیند خط لوله تجسم مناسب که بر نگرانی های خط لوله تجسم تمرکز دارد و از جزئیات اضافی انتزاعی می کند. مفاهیم اصلی مختلف فاقد استانداردسازی هستند یا فقط استانداردهای ضعیفی را ارائه می دهند که قابلیت همکاری دارند. چالشهای بیشتر شامل دستیابی به تعامل و کارایی هنگام استفاده از IReps و به طور کلی پشتیبانی از درجات بالایی از تعامل و دادههای عظیم و پویا است.
در کار آینده، این رویکرد را می توان با پرداختن به محدودیت ها و چالش های شناسایی شده، گسترش و اصلاح SRA فراتر از محدوده و تمرکز اصلی آن و اعمال و ارزیابی بیشتر SRA از طریق مطالعات موردی و مطالعات کاربر، بیشتر کرد.
منابع
- MacEachren، AM; کراک، امجی چالشهای پژوهشی در تجسم جغرافیایی. کارتوگر. Geogr. Inf. علمی 2001 ، 28 ، 3-12. [ Google Scholar ]
- کرافزیگ، دی. بانک، ک. Slama, D. Enterprise SOA: Best Practices Architecture Service-Oriented ; Prentice Hall: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 2004. [ Google Scholar ]
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO 19101:2002، اطلاعات جغرافیایی — مدل مرجع ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2002.
- کنسرسیوم فضایی باز، مدل مرجع OGC، نسخه 2.1 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2011.
- آکنین مولر، تی. هاینز، ای. Hoffman, N. Real-Time Rendering , 3rd ed.; AK Peters, Ltd.: Natick, MA, USA, 2008; پ. 1045. [ Google Scholar ]
- گونزالس، آرسی Woods, RE Digital Image Processing , 3rd ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2008; پ. 954. [ Google Scholar ]
- هیلدبرانت، دی. یک ظاهر طراحی مبتنی بر تصویر. Vis. محاسبه کنید. 2014 . تحت بررسی [ Google Scholar ]
- هیلدبرانت، دی. هاگدورن، بی. دولنر، جی. استراتژیهای مبتنی بر تصویر برای تجسم تعاملی محیطهای پیچیده ژئومجازی سه بعدی در دستگاههای سبک وزن. J. Locat. سرویس مبتنی بر 2011 ، 5 ، 100-120. [ Google Scholar ]
- هیلدبرانت، دی. تیمم، آر. تکنیک ناوبری سه بعدی کمکی و محدود برای مدل های شهر مجازی سه بعدی چند مقیاسی. GeoInformatica 2014 ، 18 ، 537-567. [ Google Scholar ]
- هیلدبرانت، دی. Döllner, J. خدمات گرا، مبتنی بر استانداردهای geovisualization سه بعدی: پتانسیل ها و چالش ها. جی. کامپیوتر. محیط زیست سیستم شهری 2010 ، 34 ، 484-495. [ Google Scholar ]
- دوسه، DA; جورجتی، دی. کوپر، CS; گالوپ، جی آر. جانسون، آی جی; رابینسون، ای. Seelig، مدل های مرجع CD برای تجسم مشارکتی توزیع شده. محاسبه کنید. نمودار. انجمن 1998 ، 17 ، 219-233. [ Google Scholar ]
- رابرتز، جی سی وضعیت هنر: نماهای هماهنگ و چندگانه در تجسم اکتشافی، مجموعه مقالات کنفرانس نماهای هماهنگ و چندگانه در تجسم اکتشافی (CMV 2007)، زوریخ، سوئیس، 2 ژوئیه 2007; انجمن کامپیوتر IEEE: واشنگتن، دی سی، ایالات متحده آمریکا، 2007; صص 61-71.
- ایزنبرگ، پی. علمکویست، ن. شولتز، جی. سرنیا، دی. Ma، KL; هاگن، اچ. تجسم مشارکتی: تعریف، چالش ها و دستور کار تحقیق. Inf. Vis. 2011 ، 10 ، 310-326. [ Google Scholar ]
- بوخلیفه، ن. رابرتز، جی سی. Rodgers, PJ یک مدل هماهنگی برای تجسم چند نمای اکتشافی، مجموعه مقالات کنفرانس نماهای هماهنگ و چندگانه در تجسم اکتشافی (CMV 2003)، لندن، انگلستان، 15 جولای 2003. انجمن کامپیوتر IEEE: واشنگتن، دی سی، ایالات متحده آمریکا، 2003; صص 76-85.
- برودلی، ک. دوسه، دی. گالوپ، جی آر. والتون، JPRB؛ Wood, J. تجسم توزیع شده و مشارکتی. محاسبه کنید. نمودار. انجمن 2004 ، 23 ، 223-251. [ Google Scholar ]
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/IEC/IEEE 42010:2011، مهندسی سیستمها و نرمافزار—توضیحات معماری ؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2011.
- OASIS. Reference Model for Service Oriented Architecture 1.0، 2006 ، در دسترس آنلاین: http://docs.oasis-open.org/soa-rm/v1.0/ در 13 اکتبر 2014 قابل دسترسی است.
- OASIS. مرجع معماری مرجع برای معماری سرویس گرا نسخه 1.0، 2012 ، در دسترس آنلاین: http://docs.oasis-open.org/soa-rm/soa-ra/v1.0/cs01/soa-ra-v1.0-cs01 html در 13 اکتبر 2014 مشاهده شد.
- کنسرسیوم فضایی باز، مدل مرجع OGC، نسخه 0.1.3 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2003.
- آلتمایر، ا. Kolbe, T. کاربردها و راه حل ها برای تجسم جغرافیایی سه بعدی قابل اجرا. در هفته فتوگرامتری 2003 ; فریچ، دی.، اد. ویچمن؛ هایدلبرگ، آلمان، 2003. [ Google Scholar ]
- Coors، V. انتزاع گرافیکی و انتقال پیشرونده در سیستمهای اطلاعات جغرافیایی سه بعدی مبتنی بر اینترنت. دکتری Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2003. [ Google Scholar ]
- ژانگ، جی. گونگ، جی. لین، اچ. وانگ، جی. هوانگ، جی. ژو، جی. خو، بی. Teng, J. طراحی و توسعه سیستم محیط جغرافیایی مجازی توزیع شده بر اساس خدمات وب. Inf. علمی 2007 ، 177 ، 3968-3980. [ Google Scholar ]
- هایست، جی. Figueiredo Ramos، HM; Reitz، T. رمزگذاری نمادشناسی برای 3D GIS – رویکردی برای گسترش تجسم مدل سه بعدی شهر به تجسم GIS، مجموعه مقالات سمپوزیوم مدیریت داده های شهری، اشتوتگارت، آلمان، 10-12 اکتبر 2007. صص 121-131.
- آژانس محیط زیست انگلستان و ولز Virtual Environmental Planning System , 2008. موجود به صورت آنلاین: http://www.veps3d.org/ قابل دسترسی در 13 اکتبر 2014.
- رایتز، تی. کرامر، ام. Thum, S. Processing Pipeline for X3D Spatial Data View Services, Proceedings of the Web3D, Darmstadt, Germany, 16-17 ژوئن 2009. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2009; صص 137-145.
- Simões، B. کونتی، جی. پیفر، اس. de Amicis، R. معماری در سطح سازمانی برای تجسم سه بعدی مبتنی بر وب تعاملی مخازن جغرافیایی ارجاع داده شده، مجموعه مقالات Web3D، دارمشتات، آلمان، 16-17 ژوئن 2009. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2009; صص 147-154.
- بوگدان، جی. Coors, V. استفاده از مدلهای شهری سه بعدی برای پشتیبانی ناوبری عابر پیاده، مجموعه مقالات کارگاه مشترک ISPRS مناظر شهری در GeoWeb، ونکوور، کانادا، 27-31 ژوئیه 2009.
- نینو-روئیز، ام. سهام، C.; اسقف، آی. Pettit, C. پشتیبانی سرویسگرا برای ابزارهای نرمافزار ناهمگن در مدلسازی و تجسم محیطی، مجموعه مقالات MODSIM2009، Cairns، استرالیا، 13-17 جولای 2009. 9.
- دانشگاه هایدلبرگ، گروه جغرافیا، GIScience. GDI3D—Spatial Data Infrastructure for 3D-Geodata—Towards Service Oriented Interoperable 3D City Models , 2010. در دسترس آنلاین: http://www.gdi-3d.de/ قابل دسترسی در 13 اکتبر 2014.
- ویلمز، سی. باسر، یو. ولاند، ک. Bareth, G. توزیع مبتنی بر اینترنت و تجسم یک مدل سه بعدی از پردیس دانشگاه کلن، مجموعه مقالات سومین اجلاس زمین دیجیتال ISDE، نسبار، بلغارستان، 12-14 ژوئن 2010.
- راس، ال. مدلهای شهر سه بعدی مجازی در مدیریت زمین شهری – فناوریها و کاربردها. دکتری پایان نامه، Technische Universität برلین، برلین، آلمان، 2010. [ Google Scholar ]
- مائو، ب. تجسم و تعمیم مدل های سه بعدی شهر. دکتری پایان نامه، موسسه سلطنتی فناوری، استکهلم، سوئد، 2011. [ Google Scholar ]
- دانشگاه هایدلبرگ، گروه GIScience. OpenStreetMap-3D ، 2012. موجود به صورت آنلاین: http://www.osm-3d.org/ قابل دسترسی در 13 اکتبر 2014.
- کنسرسیوم فضایی باز، آزمایش قابلیت همکاری تصویر سه بعدی OGC . گزارش نهایی؛ کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2012.
- پریتو، آی. Izkara، JL تجسم مدل های شهر سه بعدی در دستگاه های تلفن همراه، مجموعه مقالات Web3D، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 4-5 اوت 2012. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2012; صص 101-104.
- رودریگز، JIJ; Figueiredo، MJG; Costa، CP Web3DGIS برای مدل های شهر با CityGML و X3D، مجموعه مقالات هفدهمین کنفرانس بین المللی تجسم اطلاعات، لندن، بریتانیا، 16-18 ژوئیه 2013. صص 384-388.
- موسسه تحقیقات گرافیک کامپیوتری فراونهوفر (IGD). CityServer3D , 2014. موجود به صورت آنلاین: http://www.cityserver3d.de/ قابل دسترسی در 13 اکتبر 2014.
- Kreger, H., Estefan, J., Eds. پیمایش در چشم انداز استانداردهای باز SOA در اطراف معماری . گروه باز: سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 2009.
- آپسون، سی. فالهبر، تی، جونیور. کامینز، دی. Laidlaw، DH; شلگل، دی. وروم، جی. گورویتز، آر. ون دام، A. سیستم تجسم برنامه: یک محیط محاسباتی برای تجسم علمی. محاسبه کنید. نمودار. Appl. 1989 ، 9 ، 30-42. [ Google Scholar ]
- هابر، ر. مکناب، اصطلاحات تجسم DA: مدلی مفهومی برای سیستمهای تجسم علمی. در تجسم در محاسبات علمی ; IEEE Computer Society Press: Los Alamitos، CA، USA، 1990; صص 74-93. [ Google Scholar ]
- مورلند، ک. بررسی خطوط لوله تجسم. IEEE Trans. Vis. محاسبه کنید. نمودار. 2013 ، 19 ، 367-378. [ Google Scholar ]
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/IEC 10746-3:2009، فناوری اطلاعات—پردازش توزیع شده باز—مدل مرجع: معماری ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2009.
- علامه، ن. زنجیره خدمات وب اطلاعات جغرافیایی. IEEE Internet Comput 2003 ، 7 ، 22-29. [ Google Scholar ]
- بوشمن، اف. هنی، ک. Schmidt, DC Pattern Oriented Software Architecture, Volume 4 A Pattern Language for Distributed Computing ; John Wiley & Sons, Ltd.: Chichester, UK, 2007; پ. 636. [ Google Scholar ]
- کلمنتز، پی. باخمن، اف. باس، ال. گارلان، دی. آیورز، جی. لیتل، آر. مرسون، پی. نورد، آر. Stafford, J. Documenting Software Architectures: Views and Beyond , 2nd ed.; Addison-Wesley Professional: Boston, MA, USA, 2010. [ Google Scholar ]
- یی، JS; کانگ، بله استاسکو، جی. Jacko, J. به سوی درک عمیق تر از نقش تعامل در تجسم اطلاعات. IEEE Trans. دیداری. محاسبه کنید. Graph.ics 2007 ، 13 ، 1224-1231. [ Google Scholar ]
- هاگدورن، بی. هیلدبرانت، دی. Dollner, J. Web View Service Discussion Paper، نسخه 0.3.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010; پ. 128. [ Google Scholar ]
- هیلدبراند، دی. کلیمکه، جی. هاگدورن، بی. Döllner, J. تجسم سه بعدی تعاملی سرویس گرا از مدل های شهر سه بعدی عظیم بر روی مشتریان نازک، مجموعه مقالات دومین کنفرانس بین المللی محاسبات برای تحقیقات و کاربردهای جغرافیایی COM.Geo، واشنگتن دی سی، ایالات متحده آمریکا، 23-25 مه 2011; ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2011.
- منشور، تجسم مجازی سازی SM: یک رویکرد مبتنی بر خدمات توزیع شده برای تجسم در شبکه. دکتری پایان نامه، دانشگاه دورهام، دورهام، انگلستان، 2006. [ Google Scholar ]
- Seligmann، DD Interactive Intent-based Illustration: A Visual Language for Worlds 3D. دکتری پایان نامه، دانشگاه کلمبیا، نیویورک، نیویورک، ایالات متحده آمریکا، 1993. [ Google Scholar ]
- وویگت، ام. فرانکه، ام. Meißner, K. استفاده از دانش تخصصی و تجربی برای توصیه آگاهانه از زمینه اجزای تجسم. بین المللی J. Adv. زندگی علمی. 2013 ، 5 ، 27-41. [ Google Scholar ]
- Casner, SM یک رویکرد تحلیلی وظیفه برای طراحی خودکار ارائه های گرافیکی. ACM Trans. نمودار. 1991 ، 10 ، 111-151. [ Google Scholar ]
- گیلسون، او. سیلوا، ن. گرانت، PW; چن، ام. از داده های وب تا تجسم از طریق نقشه برداری هستی شناسی. محاسبه کنید. نمودار. انجمن 2008 ، 27 ، 959-966. [ Google Scholar ]
- گوتز، دی. Wen, Z. توصیه تجسم مبتنی بر رفتار، مجموعه مقالات چهاردهمین کنفرانس بین المللی در رابط های کاربری هوشمند (IUI 2009)، جزیره Sanibel، FL، ایالات متحده آمریکا، 8-11 فوریه 2009. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2009; صص 315-324.
- Häberling, C. Topografische 3D-Karten—Thesen für kartografische Gestaltungsgrundsätze. دکتری پایان نامه، موسسه کارتوگرافی، ETH زوریخ، زوریخ، سوئیس، 2003. [ Google Scholar ]
- Rost، RJ; لیسیا کین، بی. گینزبورگ، دی. Kessenich، JM; Lichtenbelt، B. مالان، اچ. Weiblen, M. OpenGL Shading Language , 3rd ed.; ادیسون-وسلی: بوستون، MA، ایالات متحده آمریکا، 2009; پ. 792. [ Google Scholar ]
- Bertin, J. Semiology of Graphics: Diagrams, Networks, Maps ; انتشارات دانشگاه ویسکانسین: مدیسون، WI، ایالات متحده آمریکا، 1983. [ Google Scholar ]
- Lupp، M.، Ed. نمایه توصیفگر لایه استایل شده مشخصات پیاده سازی سرویس نقشه وب، نسخه 1.1.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2007.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/IEC 19775-1:2008، فناوری اطلاعات – گرافیک کامپیوتری و پردازش تصویر – توسعه پذیر 3D (X3D)، نسخه 3.2، ISO/IEC ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2008.
- Neubauer, S., Zipf, A., Eds. 3D-Symbology Encoding Discussion Draft نسخه 0.0.1 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2009.
- Rio, ND یک رویکرد مستقل از دامنه اعلامی برای پرس و جو و ایجاد تجسم. دکتری پایان نامه، دانشگاه تگزاس در ال پاسو، ال پاسو، تگزاس، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- نوبائر، اس. Zipf، A. پیشنهاداتی برای گسترش مشخصات توصیفگر لایه سبک OGC (SLD) به بعد سوم، مجموعه مقالات سمپوزیوم مدیریت داده شهری، اشتوتگارت، آلمان، 10-12 اکتبر 2007.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/IEC 11072:1992، فناوری اطلاعات — گرافیک کامپیوتری — مدل مرجع گرافیک کامپیوتری ; سازمان بین المللی استاندارد: ژنو، سوئیس، 1992.
- Leech, J., Ed. OpenGL ES، نسخه 3.1 (4 ژوئن 2014) ؛ The Khronos Group Inc.: Beaverton, OR, USA, 2014.
- شرکت مایکروسافت. مرجع Direct3D 11 ، 2014. در دسترس آنلاین: http://msdn.microsoft.com/en-us/library/windows/desktop/ff476079 در 13 اکتبر 2014 قابل دسترسی است.
- مک دانل، بی. Elmqvist، N. به سوی استفاده از GPU در تجسم اطلاعات: مدل و اجرای عملیات فضای تصویر. IEEE Trans. دیداری. محاسبه کنید. نمودار. 2009 ، 15 ، 1105-1112. [ Google Scholar ]
- فلورینگ، S. KnoVA: معماری مرجع برای تجزیه و تحلیل بصری مبتنی بر دانش. دکتری پایان نامه، دانشگاه اولدنبورگ، اولدنبورگ، آلمان، 2012. [ Google Scholar ]
- هیر، جی. Agrawala، M. الگوهای طراحی نرم افزار برای تجسم اطلاعات. IEEE Trans. دیداری. محاسبه کنید. نمودار. 2006 ، 12 ، 853-860. [ Google Scholar ]
- لیمبورگ، Q. توسعه چند مسیره رابط های کاربری. دکتری Thesis, Université Catholique de Louvain, Louvain-la-Neuve, Belgium, 2004. [ Google Scholar ]
- آرمبراستر، MP به سمت یک مدل مرجع برای سیستم های تعامل گرا. دکتری پایان نامه، Technischen Universität برلین، برلین، آلمان، 2011. [ Google Scholar ]
- Phillips، WG Architectures for Synchronous Groupware; گزارش فنی ؛ دانشگاه کوئینز: کینگستون، ON، کانادا، 1999. [ Google Scholar ]
- گروه باز، معماری مرجع SOA . گروه باز: ریدینگ، انگلستان، 2011; پ. 192.
- هنسل، بی. غرفه، سی. چاپل، دی. مک دانیلز، جی. ویلکینز، ام. Bennett, S. Oracle Reference Architecture, User Interaction, Release 3.0, E16349-03 ; Oracle: Redwood City، CA، USA، 2011. [ Google Scholar ]
- گروه باز، هستی شناسی معماری سرویس گرا . گروه باز: ریدینگ، انگلستان، 2010; پ. 90.
- رز، ال سی، اد. معماری مرجع پورتال جغرافیایی—راهنمای جامعه برای پیاده سازی پورتال های جغرافیایی مبتنی بر استانداردها، نسخه 0.2 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2004.
- Tillman, S., Garnett, J., Eds. OWS Integrated Client—معماری، طراحی و تجربه، نسخه 0.0.3 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2006.
- Evans، JD مدل مرجع قابلیت همکاری جغرافیایی ؛ FGDC: Reston، VA، ایالات متحده آمریکا. در دسترس آنلاین: http://www.fgdc.gov/standards/organization/GIRM در 13 اکتبر 2014 قابل دسترسی است.
- GeoConnections, The Canadian Geospatial Data Infrastructure شرح معماری v2 ; منابع طبیعی کانادا: اتاوا، ON، کانادا، 2005.
- تیم پیش نویس خدمات شبکه INSPIRE، معماری خدمات شبکه INSPIRE (نسخه 3.0); گزارش فنی ؛ کمیسیون اروپا: بروکسل، بلژیک، 2008.
- هجلماگر، ج. مولرینگ، اچ. کوپر، ا. دلگادو، تی. رجبی فرد، ع. راپنت، پی. دانکو، دی. هوئت، ام. لوران، دی. آلدرز، اچ. و همکاران یک مدل رسمی اولیه برای زیرساخت های داده های مکانی. بین المللی جی. جئوگر. Inf. علمی 2008 ، 22 ، 1295-1309. [ Google Scholar ]
- Béjar, R. مشارکت در مدل سازی زیرساخت های داده های مکانی و خدمات نمایش آنها. دکتری پایان نامه، دانشگاه ساراگوسا، ساراگوسا، اسپانیا، 2009. [ Google Scholar ]
- کوپر، AK; مولرینگ، اچ. هجلماگر، ج. راپنت، پی. دلگادو، تی. لوران، دی. کوتزی، اس. دانکو، دی.م. دوئرن، یو. ایوانیاک، ع. و همکاران یک مدل زیرساخت داده های مکانی از دیدگاه محاسباتی بین المللی جی. جئوگر. Inf. علمی 2012 ، 27 ، 1133-1151. [ Google Scholar ]
- ژانگ، سی. چن، تی. نظرسنجی در مورد رندر مبتنی بر تصویر – بازنمایی، نمونهبرداری و فشردهسازی. فرآیند سیگنال.: Image Commun 2004 ، 19 ، 1-28. [ Google Scholar ]
- فرانک، U. ارزیابی مدل های مرجع. در مدل سازی مرجع برای تجزیه و تحلیل سیستم های کسب و کار ; Fettke, P., Loos, P., Eds. IGI Global: Hershey، PA، USA، 2007; صص 118-140. [ Google Scholar ]
- شالف، ج. Bethel، EW شبکه و معماری سیستم تجسم آینده. محاسبات IEEE. نمودار. Appl. 2003 ، 23 ، 6-9. [ Google Scholar ]
- دامبروک، جی. کرامر، ام. استفاده از مشارکت عمومی در برنامه ریزی شهری با فناوری وب سه بعدی، مجموعه مقالات Web3D، ونکوور، کانادا، 8 تا 10 اوت 2014. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; صص 117-124.
- وانگ، اچ. Brodlie، KW; هندلی، جی دبلیو. Wood, JD رویکرد سرویس گرا برای تجسم مشارکتی. موافق محاسبه: تمرین انقضا 2008 ، 20 ، 1289-1301. [ Google Scholar ]
- Schilling، A. زیرساخت های داده های فضایی سه بعدی برای تجسم مبتنی بر وب. دکتری پایان نامه، دانشگاه هایدلبرگ، هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- Vretanos، P.، Ed. OpenGIS Filter Encoding 2.0 Encoding Standard v2.0.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010.
- Maass, S. Techniken zur Automatisierten Annotation Interaktiver Geovirtueller 3D-Umgebungen. دکتری پایان نامه، دانشگاه پوتسدام، پوتسدام، آلمان، 2009. [ Google Scholar ]
- Glander، T. نمایش چند مقیاسی مدلهای شهر سه بعدی مجازی. دکتری پایان نامه، دانشگاه پوتسدام، پوتسدام، آلمان، 2013. [ Google Scholar ]
- Gross, M., Pfister, H., Eds. گرافیک مبتنی بر نقطه ؛ Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2007.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO 19119، اطلاعات جغرافیایی — خدمات ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2005.
- Gröger, G., Kolbe, TH, Nagel, C., Häfele, K., Eds.; استاندارد رمزگذاری زبان جغرافیایی شهر OGC (CityGML)، نسخه 2.0.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2012.
- مولر، ام.، اد. مشخصه پیاده سازی رمزگذاری نمادها، v1.1.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2006.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO 19115، اطلاعات جغرافیایی — فراداده ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2003.
- Portele, C., Ed. استاندارد رمزگذاری OpenGIS Geographic Markup Language (GML)، نسخه 3.2.1 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2007.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/IEC 13249-3:2011 فناوری اطلاعات — زبان های پایگاه داده — بسته های چند رسانه ای و کاربردی SQL — بخش 3: فضایی ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2011.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO 16739:2013 کلاس های بنیاد صنعت (IFC) برای به اشتراک گذاری داده ها در صنایع ساخت و ساز و مدیریت تاسیسات ؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2013.
- باومن، پی، اد. استاندارد رابط زبانی سرویس پردازش پوشش وب (WCPS)، نسخه 1.0.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2009.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO 19123:2005، اطلاعات جغرافیایی — طرحی برای هندسه و توابع پوشش ؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2005.
- سازمان بین المللی استاندارد (ISO)، ویرایش. ISO/PAS 17506:2012، سیستمهای اتوماسیون صنعتی و یکپارچهسازی – مشخصات طرح دارایی دیجیتال COLLADA برای تجسم سه بعدی دادههای صنعتی ؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2012.
- ویلسون، تی، اد. OGC KML، نسخه 2.2.0 ؛ کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2008.
- شرکت مایکروسافت. فرمت فایل DirectDraw Surface (DDS) ، 2014. در دسترس آنلاین: http://msdn.microsoft.com/en-us/library/windows/desktop/bb943990 در 13 اکتبر 2014 قابل دسترسی است.
- کاینز، اف. بوگارت، آر. هس، دی. فرمت فایل OpenEXR. در GPU Gems ؛ فرناندو، آر.، اد. Addison-Wesley: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 2004. [ Google Scholar ]
- گروه باز، ویرایش. چارچوب حاکمیت SOA ; گروه باز: ریدینگ، انگلستان، 2009; پ. 90.
- گروه باز، ویرایش. مدل سررسید ادغام سرویس گروه باز نسخه 2 ; گروه باز: ریدینگ، انگلستان، 2011; پ. 81.
- Nebert, D., Whiteside, A., Vretanos, PP, Eds. مشخصات خدمات کاتالوگ OpenGIS، نسخه 2.0.2 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2007.
- Maso, J., Pomakis, K., Julia, N., Eds. استاندارد اجرای خدمات کاشی نقشه وب OpenGIS، نسخه 1.0.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010.
- Callow, M., Kolling, G., Strom, J., Eds. مشخصات فرمت فایل KTX ; شرکت Khronos Group: بیورتون، اورگان، ایالات متحده آمریکا، 2013.
- Fenney، S. فشردهسازی بافت با استفاده از مدولاسیون سیگنال فرکانس پایین، مجموعه مقالات کنفرانس ACM SIGGRAPH در مورد سختافزار گرافیکی، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 26-27 ژوئیه 2003. انجمن یوروگرافیک: Aire-la-Ville، سوئیس، 2003; صص 84-91.
- Kyle, M., Burggraf, D., Forde, S., Lake, R., Eds. GML در JPEG 2000 برای تصاویر جغرافیایی (GMLJP2) مشخصات رمزگذاری، نسخه 1.0.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2006.
- کمیته داده های جغرافیایی فدرال (FGDC) ، 2014. در دسترس آنلاین: http://www.fgdc.gov/ قابل دسترسی در 13 اکتبر 2014.
- Schilling, A., Kolbe, TH, Eds. پیش نویس استاندارد رابط وب سرویس سه بعدی OpenGIS، نسخه 0.4.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010.
- شوت، پ.، اد. سرویس پردازش وب OpenGIS، نسخه 1.0.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2007.
- Vretanos، PA، Ed. OpenGIS Web Feature Service 2.0 Interface Standard ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010.
- Baumann, P. OGC WCS 2.0 Interface Standard—Core ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- De la Beaujardiere, J., Ed. مشخصات پیاده سازی سرور نقشه وب OpenGIS، نسخه 1.3.0 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2006.
- Mittring, M. Advanced Virtual Texture Topics. پیشرفت در رندر زمان واقعی در دوره گرافیک سه بعدی و بازی، مجموعه مقالات SIGGRAPH 2008، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 11–15 اوت 2008. تاتاچوک، ن.، اد. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2008; ص 23-51.
- کنسرسیوم فضایی باز پیاده سازی استاندارد OGC، همه محصولات ثبت شده ، 2014. در دسترس آنلاین: http://www.opengeospatial.org/resource/products در 13 اکتبر 2014 قابل دسترسی است.
- Autodesk Inc. Autodesk LandXplorer Server 2011 ، 2010. موجود به صورت آنلاین: http://download.autodesk.com/us/landxplorer/docs/LDX11_Server/ در 13 اکتبر 2014 قابل دسترسی است.
- به، بی. فردریک، بی. Loubier, N. استفاده از فناوری تصویربرداری سه بعدی مبتنی بر تصویر پانوراما برای پیاده سازی GIS سه بعدی مبتنی بر وب، مجموعه مقالات کنگره بررسی جنوب شرق آسیا، کوالالامپور، مالزی، 22-24 ژوئن 2011. موسسه سلطنتی نقشه برداران مالزی: پتالینگ جایا، مالزی، 2011.
- هیلدبرانت، دی. هولشکه، او. آفرمن، پی. Steffens، U. Entwurf serviceorientierter Architekturen. در Handbuch der Software-Architektur , 2nd ed.; Reussner, R., Hasselbring, W., Eds. dpunkt Verlag: هایدلبرگ، آلمان، 2008; صص 123-149. [ Google Scholar ]
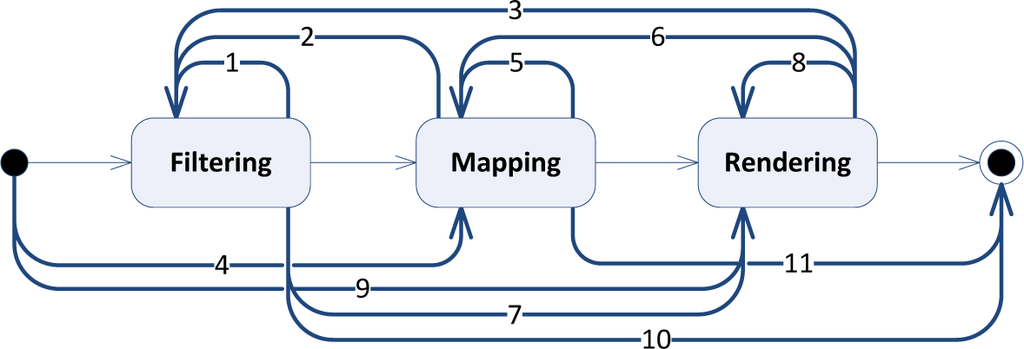
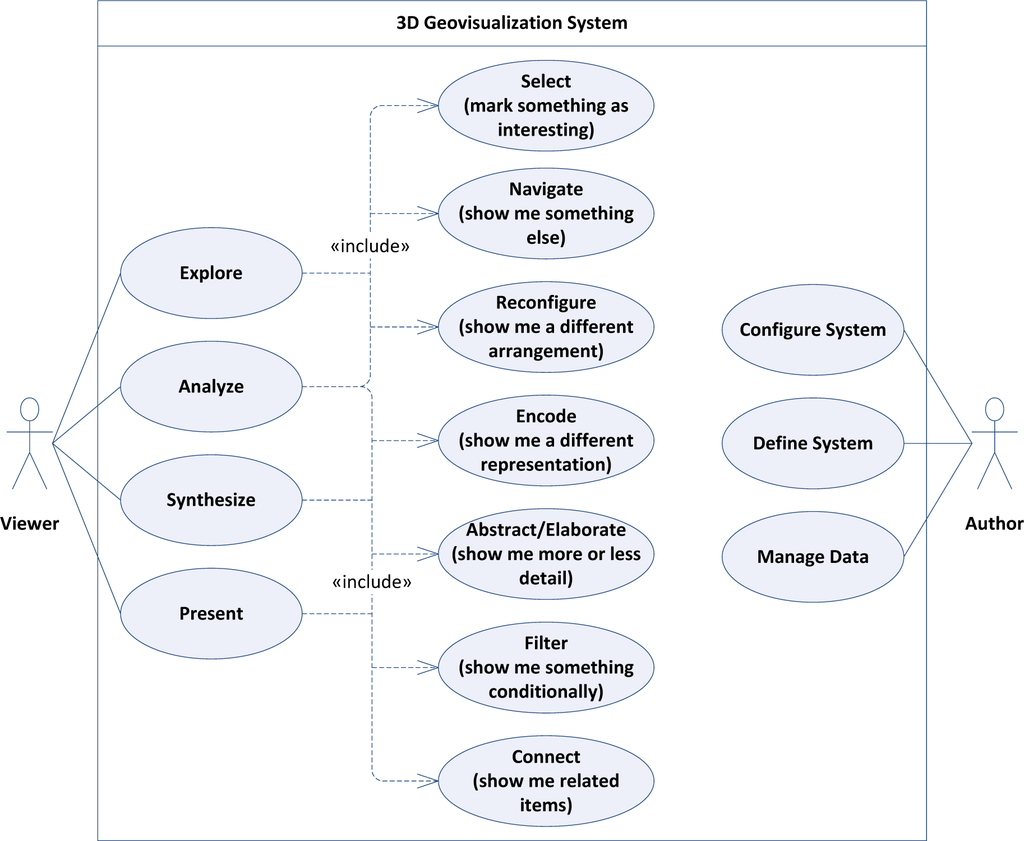




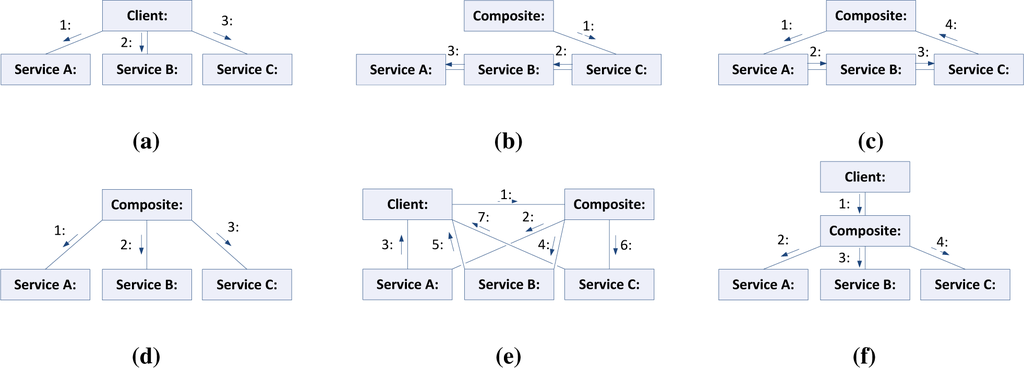
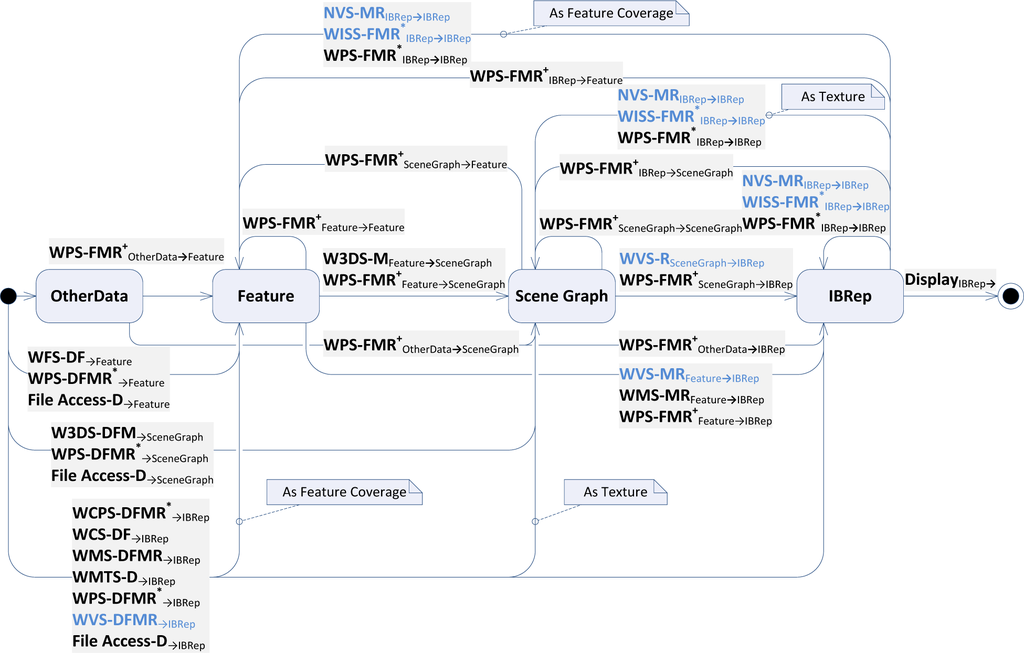
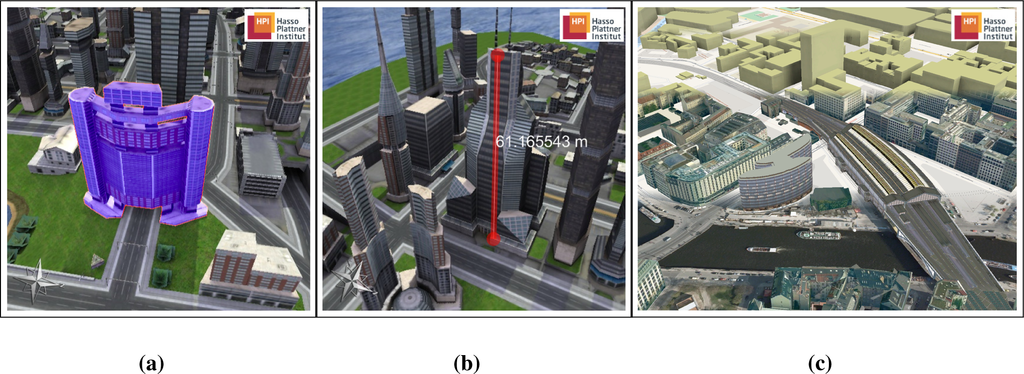
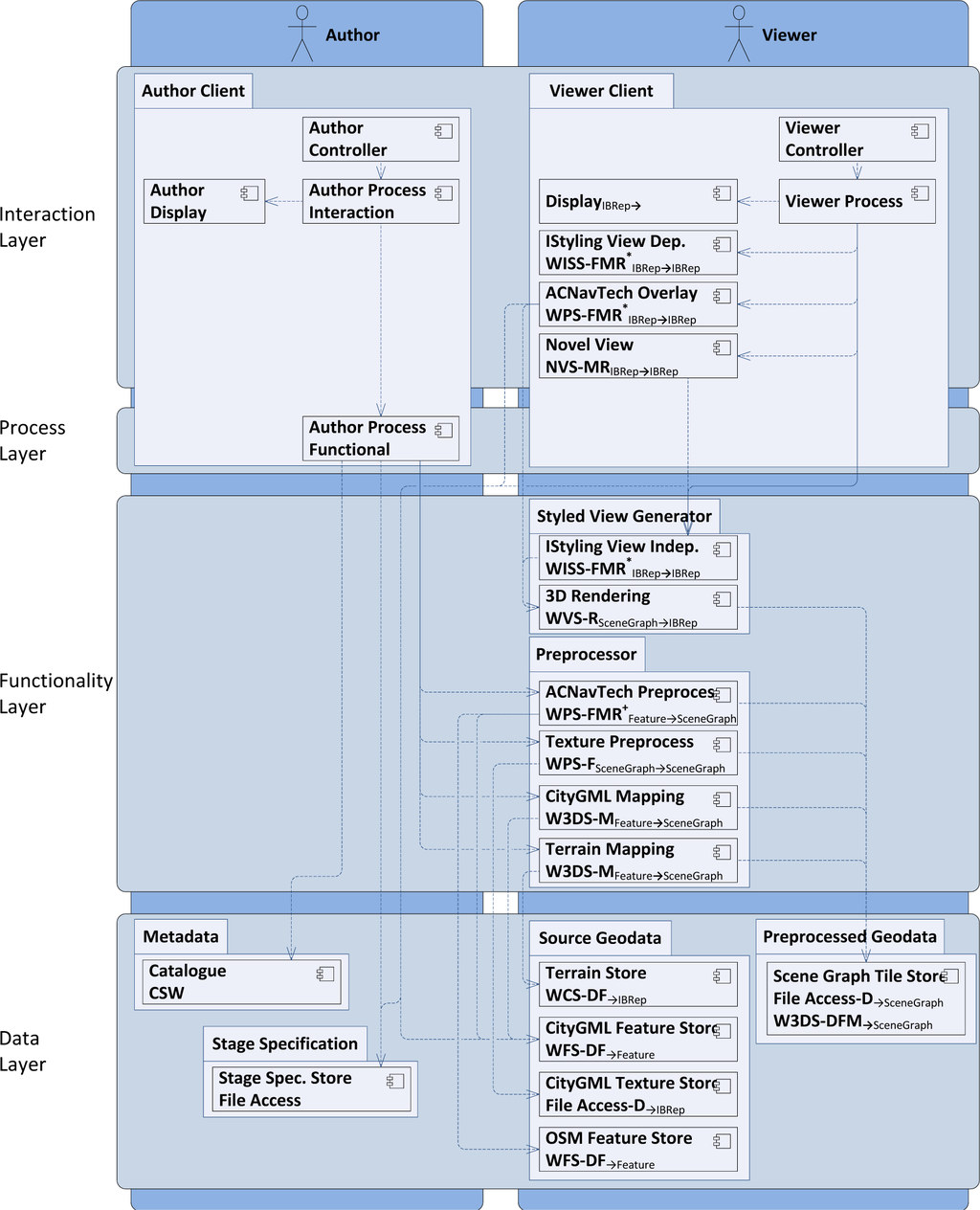
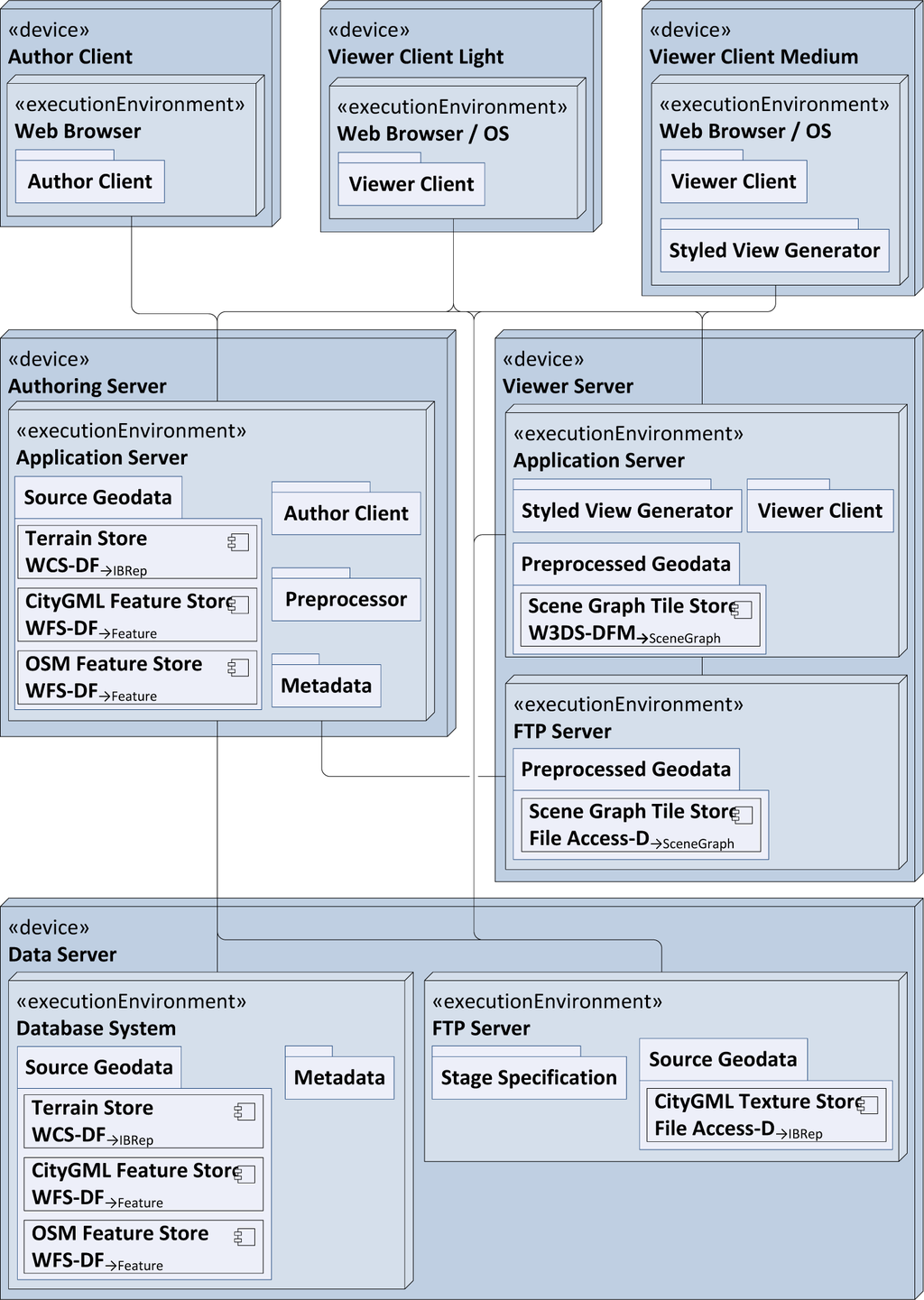
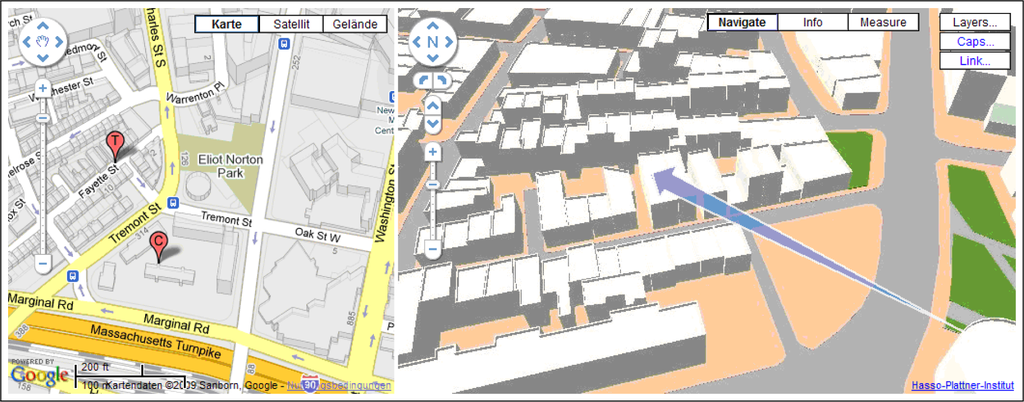
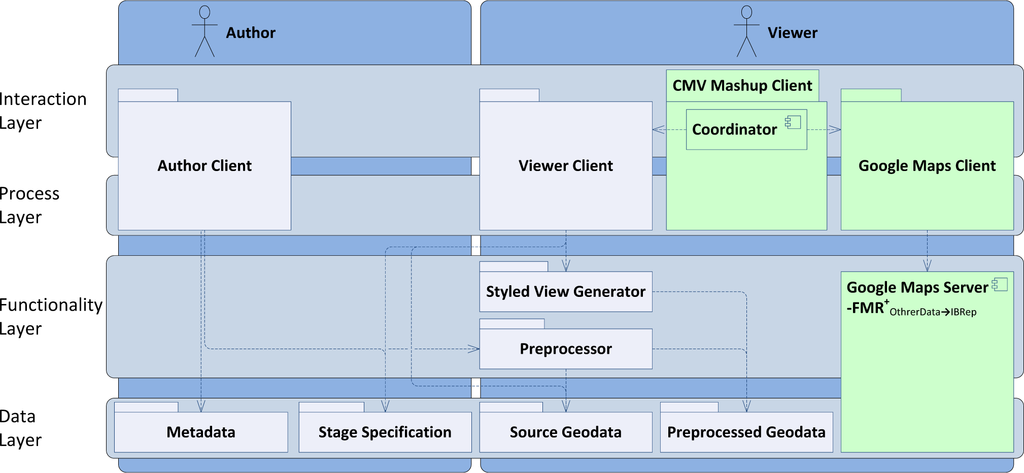
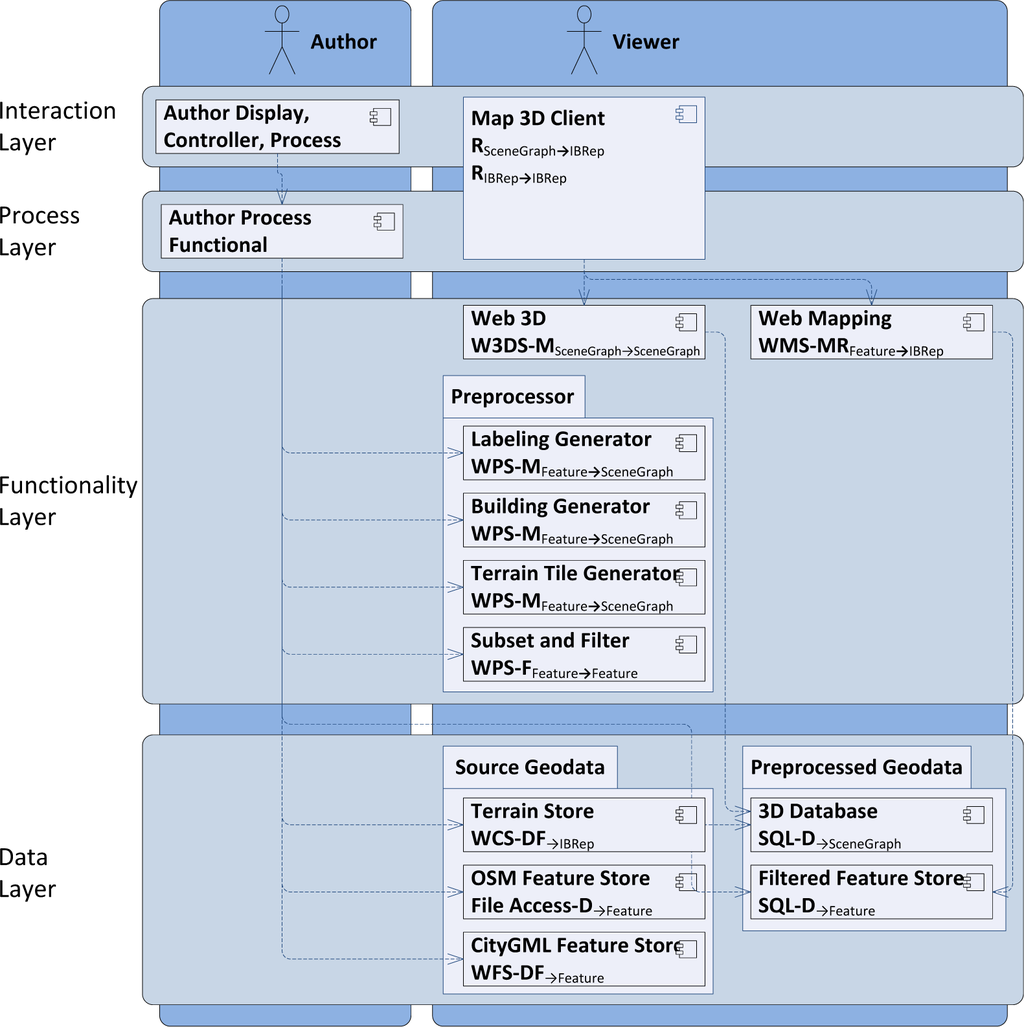


© 2014 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/4.0/) توزیع شده است
بدون نظر