

چکیده
: این مقاله یک سیستم نقشه برداری را ارائه می دهد که برای ربات های کوچک متحرک مناسب است. یک الگوریتم ad hoc برای نقشه برداری بر اساس روش شبکه اشغال توسعه داده شده است. این الگوریتم شامل برخی از ساده سازی ها به منظور استفاده با منابع سخت افزاری کم هزینه است. سیستم نقشه برداری پیشنهادی به منظور کاملا مستقل و بدون کمک ساخته شده است. این پیشنهاد با یک ربات متحرک آزمایش شده است که از حسگرهای مادون قرمز برای اندازهگیری فاصله تا موانع استفاده میکند و علاوه بر رمزگذار چرخ، از یک سیستم فانوس دریایی اولتراسونیک برای مکانیابی استفاده میکند. در نهایت، نتایج تجربی ارائه شده است.
FPGA _ شبکه اشغال ; نقشه برداری ; کم هزینه
1. مقدمه
ساختن نقشه تولید یک نمایش انتزاعی از یک محیط واقعی است. این نمایش انتزاعی ساده تر از واقعیت است، بنابراین ناوبری، برنامه ریزی مسیر و اجتناب از موانع از این سادگی سود می برد. از این رو، نقشهها نه تنها برای انسانها، بلکه برای روباتهای متحرک یا هر دستگاه تلفن همراه نیز مفید هستند.
رباتها میتوانند بسیاری از کارهایی را انجام دهند که برای انسان امکانپذیر نیست، به عنوان مثال، رباتها میتوانند به مکانهای مختلف غیرقابل دسترس انسان به دلیل محدودیت فضا یا دلایل امنیتی دسترسی پیدا کنند. در برخی شرایط، روباتها باید برای انجام وظایف خود به خود وابسته باشند. توانایی انجام نقشه برداری مستقل، یکی از الزامات دستیابی به توسعه ربات های متحرک مستقل است [ 1 ].
این کار بر روی ایجاد خودکار نقشه های داخلی تمرکز دارد. اگرچه ایجاد خودکار نقشههای داخلی یک حوزه تحقیقاتی جدید نیست، راهحل پیشنهادی در اینجا محدودیتهای مربوط به استفاده از یک ربات خودمختار کمهزینه را حل میکند. محدودیت خودمختار به این معنی است که تمام ذخیره سازی اطلاعات و محاسبات باید در داخل ربات انجام شود. ارتباط با یک گره مرکزی، مانند یک کامپیوتر، یا یک سرپرست امکان پذیر نخواهد بود. محدودیت کم هزینه به این معنی است که ذخیره سازی اطلاعات فوق الذکر (به عنوان مثال، داده ها و کد موجود در حافظه) و قدرت محاسباتی محدود است. از این رو، بهینه سازی بالا در عناصر مختلف رویکرد نقشه برداری مورد نیاز است. همانطور که در این مقاله نشان داده شده است، رویکرد نقشه برداری مبتنی بر شبکه اشغال پس انداز (BOBMapping)، شامل بهینه سازی برای رویکرد اکتشاف محیط، رویکرد سنجش و نمایش نقشه، هم در طول فرآیند نقشه برداری و هم در رویکرد ذخیره سازی نهایی است.
رویکرد BOBMapping با موفقیت در یک ربات مبتنی بر FPGA (آرایه دروازه قابل برنامه ریزی میدانی) پیاده سازی شده است. این ربات در آزمایشهای مختلف، نقشهبرداری از محیطهای واقعی مختلف استفاده شده است. این ربات توانست به طور مستقل از تمام محیط های پیشنهادی نقشه برداری کند.
بقیه سند به شرح زیر سازماندهی شده است. بخش 2 موضوعات اصلی مربوط به نقشه برداری را معرفی می کند. این بخش در مورد آخرین هنر آنها گزارش می دهد. بخش 3 روش نقشه برداری پیشنهادی را نشان می دهد. بخش 4 آزمایش های انجام شده با استفاده از یک ربات را شرح می دهد. بخش 5 پیشنهاد جدید را با راه حل های نقشه برداری موجود مقایسه می کند. در نهایت، بخش 6 این پیشنهاد را خلاصه می کند و مزایا و معایب آن را تحلیل می کند.
2. کارهای قبلی در نقشه برداری
نقشه برداری یک فرآیند پیچیده است. هر رویکرد نقشه برداری باید به موضوعات زیر بپردازد: (1) پوشش فضا. (II) روش سنجش. (iii) محلی سازی. و (IV) الگوریتم های نقشه برداری و نمایش داده ها. روبات ها با استفاده از انواع مختلف حسگرها یک نمایش داخلی از محیط خود را به دست می آورند. بسته به فناوری هر حسگر، الگوی نمایش و پردازش داده ها تغییر می کند. بنابراین رویکرد پوشش فضای مورد نقشه برداری نیز تغییر می کند. کارهای قبلی که به نقشه برداری داخلی می پردازند راه حل هایی را برای هر یک از این چهار موضوع پیشنهاد کرده اند.
2.1. الگوریتم کاوش
داشتن یک نقشه قابل اعتماد مستلزم آن است که تمام منطقه یا حداقل فضایی که ربات قادر به حرکت در آن است، شناسایی شده باشد. در نتیجه، تعریف برنامهریزی حرکت، همچنین برای کاهش زمان نقشهبرداری و به حداقل رساندن بازبینیهای غیر ضروری مکانهای از قبل احساسشده، بسیار مهم است. این وظیفه در تمام الگوریتم های نقشه برداری گنجانده شده است. به طور کلی، سه احتمال اصلی وجود دارد: (1) رویکردهای تصادفی. (II) رویکردهای هدایت شده؛ و (iii) رویکردهای مبتنی بر اطلاعات. بسیاری از آنها در الگوریتم های تفکیک پیچ و خم مورد مطالعه قرار گرفته اند. با این حال، کاربرد این الگوریتمها در نقشهبرداری مستلزم تفاوتهایی است. پوشش فضایی مبتنی بر نقشه باید تمام فضا را کاوش کند و نه تنها خروجی پیچ و خم را پیدا کند.
در این پیشنهاد، از یک الگوریتم مبتنی بر اطلاعات [ 2 ، 3 ] استفاده شده است. حرکت بعدی را با استفاده از اطلاعاتی در مورد محیطی که ربات قبلاً به دست آورده است انتخاب می کند.
2.2. روش سنجش
برای آگاه کردن ربات از محیط خود نیاز به دستگاه های حسگر دارد. سنسورهای فاصله وجود دارند که فقط تشخیص می دهند که یک مانع از آستانه نزدیکتر باشد. علاوه بر این، سنسورهایی وجود دارند که خروجی آنها فاصله تا یک مانع است که برای سیستم های نقشه برداری بسیار مفید است. متداولترین حسگرهایی که برای نقشهبرداری استفاده میشوند، حسگرهایی برای اندازهگیری برد هستند که فاصله اشیاء را نشان میدهند. در میان سنسورهای فاصله یاب، اولتراسونیک [4-7 ] و مادون قرمز [ 5 ، 8 ، 9 ]] به دلیل کاهش هزینه، اندازه کوچک و مصرف برق کم، علاوه بر دقت خوب، به طور گسترده مورد استفاده قرار می گیرند. سنسورهای اولتراسونیک زمان پرواز پژواک یک قطار پالسی از امواج فشار صوتی را که به یک جسم منعکس میشوند، اندازهگیری میکنند. در حالی که سنسورهای مادون قرمز زاویه تابش پرتو مادون قرمز منعکس شده را اندازه گیری می کنند. سنسورهای مسافت یاب دیگری که دقت بهتری را ارائه می دهند، لیزرها هستند، همانطور که در [ 10-12 ] دیده می شود، که قادر به اندازه گیری بیش از یک منطقه 180 درجه تا فاصله 80 متری به جای زاویه باریک و برد کوتاه قبلی هستند، اما در از سوی دیگر، آنها گران تر، بزرگتر و پیچیده تر هستند. در نهایت، سنسورهای تصویر (دوربینها) وجود دارند [ 13 ، 14] بر اساس اکتساب تصویر. این دوربینها حجم عظیمی از اطلاعات را ارائه میکنند، اما به محاسبات بسیار بیشتر، مصرف انرژی بالاتر و گرانتر نیاز دارند.
در مورد ما، سنسورهای مادون قرمز برای تشخیص موانع انتخاب شده اند. دستگاه های اولتراسونیک انتخاب نشدند، زیرا آنها قبلاً برای کارهای دیگری استفاده می شوند که سیستم محلی سازی است (به بخش 2.3 مراجعه کنید). در هر لحظه، یکی از چراغ های محلی سازی سیگنال اولتراسوند منتشر می کند. اگر سیستمهای تشخیص موانع از امواج فراصوت استفاده میکردند، نیاز به استفاده از محدوده فرکانسی متفاوتی داشت که هزینه سنسورها را افزایش میداد. بنابراین، استفاده از حسگرهای مادون قرمز برای تشخیص موانع، از هرگونه تداخل بین دو سیستم جلوگیری می کند.
2.3. بومی سازی
دانستن موقعیت ربات برای ثبت صحیح ویژگی های فضایی که نقشه نهایی را تشکیل می دهد ضروری است. بسیاری از کارهای قبلی هم مسائل مربوط به نقشه برداری و هم محلی سازی را مطالعه می کنند. اکثر آنها برای هر یک به طور جداگانه راه حل هایی را نشان می دهند، یعنی یک کار قبلاً فرض شده یا حل شده است و دیگری بعداً حل می شود. پیشنهادهای دیگر سعی می کنند هر دو مشکل را همزمان حل کنند، که به عنوان مسئله SLAM (محلی سازی و نقشه برداری همزمان) شناخته می شود [ 10 ]]. SLAM را می توان با استفاده از رویکردهای مبتنی بر فیلتر کالمن حل کرد، جایی که نقشه تولید شده احتمال بعدی بومی سازی ویژگی ها یا چراغ های خاص در محیط را نشان می دهد. سایر الگوریتمها از تکنیکهای حداکثرسازی انتظار برای حل SLAM استفاده میکنند. با این حال، هر دو راه حل دارای اشکالاتی هستند، به خصوص این واقعیت که از موقعیت یابی نسبی استفاده می کنند.
سیستم های ماهواره ای ناوبری جهانی (GNSS)، مانند GPS یا GLONASS معروف، رایج ترین راه های محلی سازی هستند. اما هدف این پروژه نقشه برداری از محیط های داخلی است. از این رو، استفاده از این روش ها به دلیل قدرت تفکیک کنتورها کنار گذاشته می شود. علاوه بر مشکلات مربوط به دریافت سیگنال در داخل ساختمان ها. بنابراین، در سیستمهای نقشهبرداری داخلی، تکنیکهای دیگری مانند کیلومتر شماری (انکودرهای موتور) یا سیستمهای بیکن مورد نیاز است [ 15 ].
در این پیشنهاد، با توجه به اهمیت محلیسازی برای نقشهبرداری، محلیسازی با استفاده از هم اندازهگیری کیلومتر شماری و هم از یک سیستم بیکن مبتنی بر اولتراسوند مورد بررسی قرار میگیرد [ 16 ، 17 ]. رمزگذارها محلی سازی مداوم ربات را در حین حرکت فعال می کنند، اما خطای آن، اگرچه کوچک است، تجمعی است. برای به دست آوردن مکان دقیق بدون خطای تجمعی، از یک سیستم مبتنی بر اولتراسوند بیکن نیز استفاده می شود. خطای آن کمتر از پنج سانتی متر است و مانند تکنیک کیلومتر شماری به تخمین موقعیت قبلی بستگی ندارد. با این حال، آنقدر سریع نیست که بتوان در حین حرکت از آن استفاده کرد. بنابراین، هر دو روش مکمل یکدیگر هستند.
2.4. الگوریتم های نقشه برداری و نمایش داده ها
هدف از نقشه برداری تولید یک نمایش انتزاعی از فضا است. این نمایش باید به عنوان مناطقی توصیف شود که ربات متحرک موانعی را پیدا می کند یا جایی که فضای آزاد برای ناوبری وجود دارد. یادگیری نقشه مفهومی است که هم قوانین حرکت در منطقه و هم بازنمایی منطقی درونی محیط را تعریف می کند. در طول دو دهه گذشته الگوریتم های مختلفی برای نقشه برداری توسعه داده شده است.
دو رویکرد اصلی مورد استفاده برای یادگیری نقشه به عنوان پارادایم هندسی و پارادایم توپولوژیکی [ 5 ] شناخته می شوند. الگوریتمهای هندسی محیط را با استفاده از روابط هندسی مطلق بین موانع پیدا شده مدلسازی میکنند، در حالی که نقشههای توپولوژیکی نقشه را بهعنوان نموداری از گرهها تعریف میکنند که مکانهای کلیدی فضا را نشان میدهند که از نظر فضایی با استفاده از کمانها به هم مرتبط هستند. رایج ترین و محبوب ترین روش هندسی، نقشه های شبکه اشغال [ 18 ، 19 ] است. این روش یک ماتریس 2 بعدی از سلول ها را تعریف می کند که هر یک نشان دهنده یک منطقه مربع مشخص از محیط است که احتمال اشغال شدن را ذخیره می کند .، احتمال اینکه مانعی آن سلول را اشغال کند. از یک سو، نقطه قوت این نمایش، سهولت در ایجاد و به روز رسانی نقشه است. از طرف دیگر، نمایش فضای زیادی از حافظه را اشغال می کند و زمان بیشتری برای اتمام آن نیاز است، بنابراین برای نقشه برداری در فضای باز یا فضاهای بزرگ چندان مفید نیست.
همچنین امکان ترکیب هر دو روش توپولوژیکی و هندسی برای جبران معایب آنها وجود دارد. اینها نقشه های ترکیبی [ 5 ] نامیده می شوند. اشکال این رویکردها این است که آنها به محاسبات و نگهداری بیشتری نیاز دارند، علاوه بر این واقعیت که ارتباط بین هر دو طرح آسان نیست، و تبدیل یک نمایش به دیگری به یک سیستم سخت افزاری قدرتمندتر نیاز دارد. الگوریتم های محبوب نقشه های مبتنی بر ویژگی [ 8 ، 10 ، 11 ] را در نیمه راه بین نقشه های هندسی و توپولوژیکی تولید می کنند. این الگوریتمها محیط را با ویژگیهای پارامتری اشیا، که به صورت خطوط، نقاط، کمانها و غیره تعریف میشوند، نشان میدهند.. آنها اطلاعات متریک بیشتری را ارائه می دهند و در عین حال فضای حافظه را ذخیره می کنند. با این حال، به دلیل دشواری پیشتعریف موانع، بهروزرسانی سخت و نیاز به محیطهای ساختاریافته، پیچیدهتر هستند. در نهایت، برخی از الگوریتمهای دیگر مانند Space-Trails برای تیمهای ربات [ 4 ]، شبکههای اشغال فازی و بردار ادراک عمومی (هر دو در [ 6 ] دیده میشوند) یا فضای پیکربندی [ 9 ] وجود دارد.
علاوه بر این، افزایش استفاده از ارتباطات بیسیم، چشماندازی را به سمت روباتهای مشارکتی باز میکند که میتوانند با تقسیم کار کامل بین گروهی از روباتهای همگام، روند نقشهبرداری را سرعت بخشند. ربات ها اطلاعاتی در مورد موقعیت خود، منطقه از قبل نقشه برداری شده یا سایر ویژگی های شناخته شده با یکدیگر به اشتراک می گذارند [ 4 ، 8 ]. هنگامی که کار نقشه برداری به پایان رسید، پردازش پست باید به منظور ادغام هر نمایش نقشه از هر ربات متحرک برای به دست آوردن نقشه نهایی انجام شود [ 8 ]. این وظیفه معمولاً به یک گره مرکزی قدرتمندتر نیاز دارد [ 18 ].
این مقاله از یک نسخه بهینه از رویکرد نقشهبرداری شبکه اشغال برای حل رویکرد یادگیری نقشه استفاده میکند.
3. رویکرد نقشه برداری
این مقاله روشی را برای ترسیم هر محیط داخلی ساختاریافته یا بدون ساختار پیشنهاد می کند. الگوریتم مبتنی بر سادهسازی تکنیک شبکه اشغال است. از این رو، هدف به دست آوردن یک نقشه دو بعدی از محیط است که می تواند توسط یک ماشین مدیریت شود.
در این رویکرد، با پیروی از اصول شبکه اشغال، فضا از نظر مفهومی به سلولهای مربعی تقسیم میشود که مطابق با یک مساحت مربع هندسی در دنیای واقعی است. رویکرد اصلی Occupancy Grid به هر سلول احتمال اشغال شدن توسط یک مانع را اختصاص می دهد. نتیجه این رویکرد یک ماتریس حافظه است که این احتمالات را ذخیره می کند.
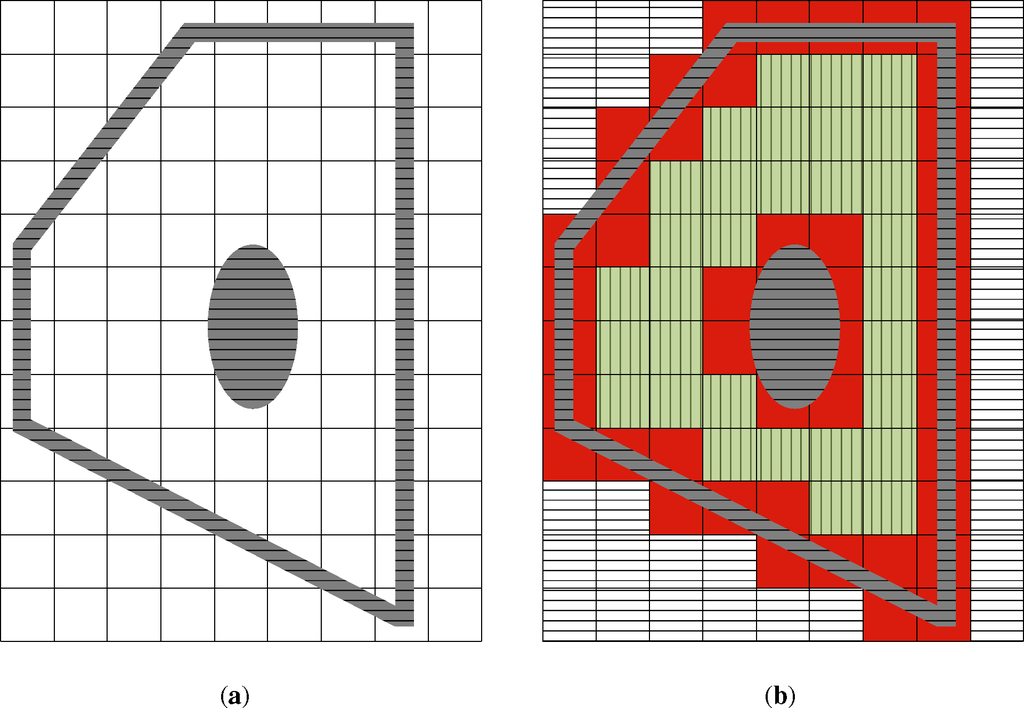
با این حال، در این پیشنهاد، با توجه به سلول (i، j)، فقط دو حالت ممکن وجود دارد: (الف) اعتقاد کامل به فضای خالی خالی بودن. و (ب) محکومیت به اشغال جزئی یا کلی. دلیل اصلی این امر، تسهیل ناوبری پنهان است، بنابراین یک ربات کم هزینه می تواند به راحتی بدون هدایت خارجی و با استفاده از منابع پردازشی پایین حرکت کند [ 20 ]]. علاوه بر این، اندازه سلول برای برآوردن شرایط زیر تنظیم شده است: ربات در سلول قرار می گیرد و خود را در مرکز سلول قرار می دهد، و یک ربات هولونومیک می تواند در یک سلول بچرخد. از این رو باید از خالی بودن کامل سلول اطمینان حاصل کرد تا شرایط قبلی تأیید شود. از نظر مفهومی، ربات ممکن است در هر سلول (a) بدون خطر برخورد قرار گیرد یا حرکت کند. بنابراین، مهم نیست که یک مانع شناسایی شده چقدر کوچک باشد، سلول به عنوان اشغال شده تعریف می شود ( شکل 1 را ببینید ). پس از فرآیند نقشه برداری، شبکه شامل سلول های آزاد، اشغال شده و غیرقابل دسترسی است.
رویکرد شبکه اشغال ساده شده [ 3 ، 21 ] تنها دو حالت گسسته و انحصاری ممکن را تعریف می کند، برخلاف روش اصلی شبکه اشغال، که هر گونه احتمالی را برای هر سلول اجازه می دهد. از آنجایی که فقط دو مقدار وجود دارد، هر سلول فقط به یک بیت برای نمایش وضعیت خود نیاز دارد: [1|0]، اشغال شده یا خالی. در نتیجه، مقدار حافظه مورد نیاز برای ذخیره نقشه کاهش می یابد.
این رویکرد جدید در مقایسه با رویکردهای شبکه اشغال سابق یک اشکال دارد: به قابلیت اطمینان بالاتری در سیستمهای محلیسازی و سنجش نسبت به سیستمهای موجود نیاز دارد. ایجاد این رویکرد تولید نقشه طبقهبندی شده به دقت بالایی در هنگام بدست آوردن موقعیت ربات و اندازهگیری فاصله تا موانع نیاز دارد. اندازه گیری خطای هر دو سیستم در بخش های 3.3 و 4 توضیح داده شده است.
روش نگاشت شامل یک الگوریتم برنامه ریزی حرکتی خاص، و همچنین برخی ملاحظات در مورد ساختار محیط است (بخش 3.1). برای انجام اکتشاف محیط، دستگاه های حسگر در موقعیت های خاصی از ربات قرار داده شده اند. موقعیت های حسگر و محدوده اکتشاف آنها (بخش 3.2) با رویکرد نقشه برداری مرتبط است. علاوه بر این، ملاحظات مربوط به محلی سازی ربات (بخش 3.3) در طول فرآیند نقشه برداری مرتبط است. در نهایت، الگوریتم BOBMapping در بخش 3.4 ارائه شده است و با ملاحظات قبلی مرتبط است.
3.1. کاوش در محیط زیست
برای اطمینان از فرآیند نقشه برداری صحیح، رویکرد اکتشاف باید اطمینان حاصل کند که هر سلول قابل دسترسی یا بازدید یا حس می شود. الگوریتمهای موجود ربات را به مکانی میبرد که بتواند اطلاعات جدید را در آن جمعآوری کند [ 2 ، 3 ]. انتخاب این مکان نیازمند پردازش پیچیده در کامپیوتر است. برای ساده کردن فرآیند نقشه برداری، ربات یک نسخه بهینه از الگوریتم ترمو [ 22 ] را پیاده سازی می کند که در آن ربات تنها می تواند به سلول همسایه حرکت کند. سلول های همسایه به عنوان سلول های متعامد در نمایش ماتریس تعریف می شوند، به عنوان مثال ، همسایه های سلول ( i، j ) عبارتند از ( i، j- 1)، ( i، j + 1)، ( i- 1 ، j.), ( i + 1 , j ). این سلول ها تنها سلول هایی هستند که در تکرار بعدی هنگام حرکت ربات در نظر گرفته می شوند. از این رو، حرکات ربات فقط چرخش های زاویه 90 درجه و حرکات خطی برابر با طول یک سلول است. انتخاب همسایه برای جابجایی تکرار بعدی با استفاده از اولویت در جهت عقربه های ساعت انجام می شود. در مورد ما، اولین سلولی که بازدید می شود سلول شمالی خواهد بود ( یعنی ( i, j- 1)) ( شکل 2a را ببینید ). ربات از این سلول بازدید خواهد کرد اگر همسایگان ناشناخته ای داشته باشد و آنجا خالی باشد. در غیر این صورت، ربات در جهت عقربه های ساعت، همسایه بعدی سلول فعلی را انتخاب می کند. در شکل 2 الف، همسایه های 1 و 2 کنار گذاشته می شوند، زیرا همسایه های ناشناخته ای ندارند، بنابراین سلول 3 انتخاب می شود. به همین دلیل، در شکل 2b ، همسایه 2 انتخاب شده است. در نهایت، اگر ربات هیچ همسایه ای برای بازدید نداشته باشد ( شکل 2c )، به سلول قبلی که شرایط همسایه ناشناخته را برآورده می کند، برمی گردد. این الگوریتم تضمین می کند که هر سلول نقشه یا بازدید یا حس می شود.
یک تصمیم مهم برای اجرای نقشه شبکه اشغال، تعیین اندازه سلول است. در حالت ایده آل، هرچه اندازه کوچکتر باشد، نقشه دقیق تر خواهد بود. با این حال، به فضای حافظه و دقت سنسور بیشتری نیاز دارد. در مورد ما، هدف فعال کردن ناوبری روبات ها از طریق منطقه نقشه برداری شده است. اگر سلول ها کوچکتر از اندازه ربات باشند، برنامه ریزی ناوبری پیچیده تر خواهد بود. در این پیشنهاد، یک راه حل مبادله ای به دست آمده است: سلول به عنوان حداقل فضایی که ربات در آن قرار می گیرد و می تواند بدون تصادف بچرخد، ابعاد داده شده است. علاوه بر این، باید توجه داشت که ممکن است به یک راهرو عرض سلولی باریک دسترسی نداشته باشد. بستگی به تراز بین شبکه و این راهرو دارد. برای اطمینان از نقشه برداری یک راهرو باریک، باید حداقل، 22–√22اندازه سلول
3.2. ساختار حسگرها
همانطور که در بخش 2 معرفی شد، سنسورهای فاصله یاب برای رویکرد ما مناسب هستند. برای جلوگیری از تداخل با سیستم محلی سازی (به بخش بعدی مراجعه کنید)، حسگرهای مادون قرمز برای اندازه گیری فاصله تا موانع انتخاب شده اند. حسگرهای مادون قرمز با انتشار پرتوهای مادون قرمز که توسط اجسام منعکس می شوند، فاصله ها را اندازه گیری می کنند. پرتو مادون قرمز بسیار باریک و جهت دار است، بنابراین تعیین موقعیت مانع شناسایی شده کار ساده ای است. پرتو منعکس شده توسط یک آشکارساز فوتوالکتریک حساس به موقعیت دریافت می شود. این سنسور از روش مثلث بندی با در نظر گرفتن زاویه انحراف پرتو مادون قرمز منعکس شده برای اندازه گیری فاصله تا مانع استفاده می کند. از آنجایی که سنسورهای مادون قرمز زاویه انحراف انعکاس یک جسم را اندازه گیری می کنند، دما و تغییر در بازتابش جسم بر این اندازه گیری تأثیر نمی گذارد. خروجی یک سیگنال آنالوگ بین 3.1 ولت و 0.3 ولت است. ولتاژ خروجی قبل از هدایت به برد FPGA توسط یک ADC خارجی (مبدل آنالوگ به دیجیتال) دیجیتالی می شود. خروجی ولتاژ IR را می توان با یک قوس الکتریکی به منظور بدست آوردن فاصله مدل کرد. با این حال، برای اجتناب از استفاده از تابع arcttangent، که منابع پردازش بیشتری را می گیرد، و بدون از دست دادن دقت، از یک جدول جستجوی تجربی به دست آمده استفاده شده است.
خطی بودن پرتوهای IR مستلزم حرکت سنسور برای اسکن یک منطقه است. این حرکت ممکن است با چرخاندن سنسور یا با جابجایی آن انجام شود. حسگرهای IR در ساختار ربات ثابت هستند، بنابراین سنجش در زمانی که ربات در حال حرکت است انجام می شود. به این ترتیب هیچ موتور اضافی برای حرکت سنسورها لازم نیست. حسگرها در ربات قرار گرفتهاند و پس از اینکه ربات از سلول ( i ) به سلول بعدی ( i + 1) منتقل شد، همه همسایگان سلول ( i + 1) قابل تشخیص هستند.
نحوه قرارگیری حسگرهای IR در شکل 3 ارائه شده است . این شکل نشان می دهد که پس از انتقال از C 1 به C 2، سلول های B 2، C 3 و D 2 حس شده اند. حسگرهای i و j در کنارههای ربات قرار میگیرند و به صورت متعامد در جهت حرکت ربات قرار میگیرند. هنگامی که ربات از C 1 به C 2 حرکت می کند، این حسگرها سلول های B 2 و D 2 را مانند یک اسکنر پوشش می دهند. تشخیص کامل سلول در جلو دشوارتر است. هنگامی که ربات از C 1 به C 2 حرکت می کند، حسگر kو m ناحیه سبز C 3 و ناحیه علامت گذاری شده عمودی C 4 را اسکن کنید ( شکل 3b را ببینید ). ناحیه علامت گذاری شده افقی C 3 معادل C 4 است و قبلاً در انتقال از C 0 به C 1 احساس شده بود. با این حال، یک مثلث کوچک از C 3 توسط پرتوهای k و m احساس نمی شد . شکل 3c نشان می دهد که این مثلث کوچک توسط پرتو l اسکن می شود . این سه تیر، k ، l و m مانند یک کامیون برف روب کار می کنند. زوایای تیرها kو m طوری تعریف می شوند که هر پرتو به رأس های مخالف سلول دوم به سمت جلو اشاره می کند.
قرارگیری حسگرها و حرکت ربات تضمین می کند که تمام سطح سلول در محدوده دقت بالای سنسورها بررسی می شود. با توجه به باریک بودن پرتوها، احتمال عدم تشخیص مانع در محدوده سنسور بسیار کم است. یک مانع ناشناخته منجر به بدترین خطای ممکن در این سناریو می شود و یک سلول اشغال شده را آزاد تعریف می کند. از سوی دیگر، اندازه گیری اشتباه سنسور یک سلول آزاد را اشغال شده تعریف می کند. راه حل پیشنهادی نشان می دهد که هر خطای احتمالی در دسته خطای دوم قرار می گیرد، که به اندازه خطای اول برای ربات خطرناک نیست.
3.3. بومی سازی
موقعیت ربات با استفاده از یک سیستم مبتنی بر چراغ های اولتراسونیک، به ویژه، روش ارائه شده در [ 16 ، 17 ] به دست می آید. با استفاده از زمان پرواز امواج مافوق صوت، فواصل تا سه نقطه لنگر (ساطع کننده های ماوراء صوت) را اندازه گیری می کند. همگام سازی بر اساس سیگنال های فرکانس رادیویی (RF) است که برای دانستن اینکه سیگنال های اولتراسونیک چه زمانی منتشر شده اند، لازم است. این ساطع کننده های اولتراسوند در سقف اتاقی قرار دارند که قرار است نقشه برداری شود. سه لایه با استفاده از این سه فاصله دو راه حل ممکن را ارائه می دهد، اما یکی از آنها بالای سقف است، بنابراین می توان آن را دور انداخت. سیستم میانگین خطای زیر 3.5 سانتی متر را دریافت می کند. با این حال، این دقت تنها در صورتی به دست می آید که ربات ثابت باشد.
بخش قبل نشان داد که پرتوها موانع را در حین حرکت روبات تشخیص می دهند. از این رو، دانستن موقعیت دقیق ربات در حین حرکت برای قرار دادن صحیح هر شی شناسایی شده مهم است. محلی سازی در حین حرکت با استفاده از رمزگذارهای موتور، یکی در هر موتور محاسبه می شود. این انکودرها پالس هایی را مطابق با فاصله زاویه ای ارائه می دهند. بنابراین با دانستن شعاع چرخ ربات می توان جابجایی خطی را محاسبه کرد. در نهایت، ربات موقعیت فعلی خود را با اضافه کردن موقعیت قبلی به دست آمده توسط اولتراسوند و فاصله به دست آمده از اطلاعات رمزگذار محاسبه می کند.
اشکال اصلی محلی سازی مبتنی بر رمزگذار خطای تجمعی آن است که به وضوح بر دقت نقشه برداری تأثیر می گذارد. به همین دلیل، ربات باید موقعیت خود را با استفاده از سیستم محلی سازی مبتنی بر اولتراسونیک برای جلوگیری از این خطای تجمعی به دست آورد. این فرآیند پس از دو حرکت خطی یا پس از حرکت خطی به دنبال یک چرخش انجام می شود.
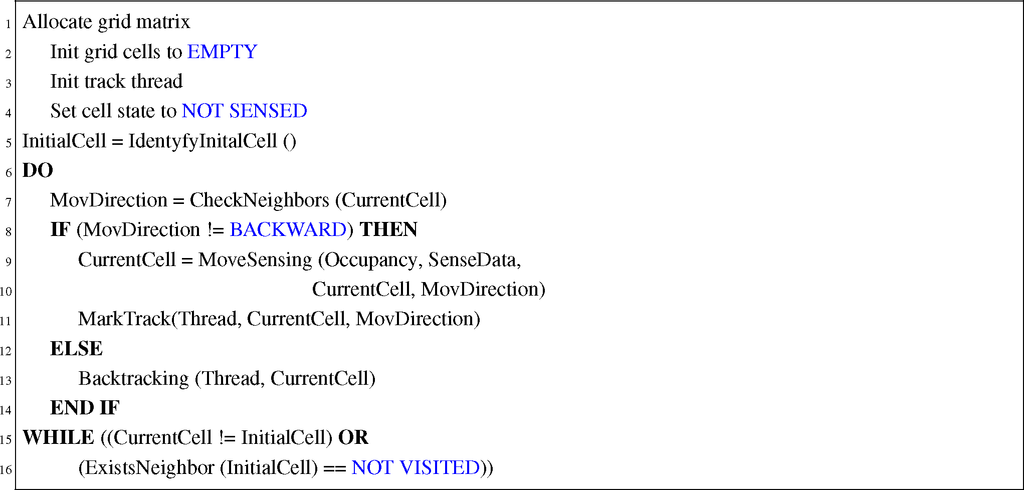
3.4. الگوریتم نقشه برداری BOB
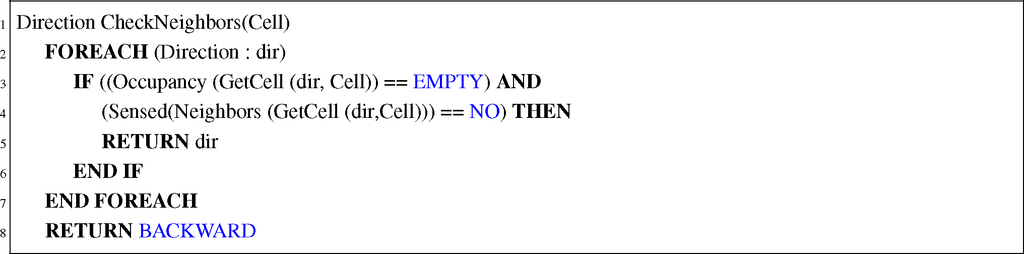
روش کاوش پیشنهادی، ارائه شده در بخش 3.1، تضمین می کند که هر سلول قابل دسترسی یا بازدید یا حس می شود. از این رو، الگوریتم تمام فضای موجود را ترسیم می کند ( کد 1 ). اگرچه الگوریتم کاوش محیط، انتخاب سلول اولیه را محدود نمی کند، ساختار حسگر نیاز دارد که ربات ابتدا در سلولی قرار گیرد که همسایه جلویی آن خالی است. این الگوریتم شامل یک بهینه سازی مربوط به تصمیم همسایه برای بازدید در تکرار زیر است ( کد 2). این بهینهسازی باعث میشود ربات آن حرکات را حذف کند و منجر به اطلاعات شناخته شده (سلولهای حسشده) شود، بنابراین مدت زمان فرآیند نقشهبرداری بهینه میشود. الگوریتم در دو شرط به پایان می رسد: (1) ربات به سلول اولیه باز می گردد و همسایه قابل کاوشی ندارد. یا (ii) تک تک سلول های شبکه حس شده است. با این حال، اگر در طول هر جابجایی، ربات سلولی را که قبلاً حس کرده بود بررسی کند، بسته به قرائت جدید با یک استثنا وضعیت آن را تغییر میدهد: اگر قرائت جدید نشان دهد که سلولی که توسط ربات بازدید شده است اشغال شده است، این اطلاعات خواهد بود. دور انداخته شد، زیرا سلول خالی است. ما می توانیم اطمینان حاصل کنیم، زیرا ربات بدون برخورد از سلول عبور کرد.
بخش 3.2 نحوه قرارگیری حسگرها و اینکه کدام سلول در هر مرحله حس شده است را توضیح داد. برای هر سلول در شبکه، الگوریتم چهار بیت داده را در طول فرآیند نقشه برداری ذخیره می کند. اولین مورد از این بیت ها اشغال سلول را نشان می دهد که برای یک سلول آزاد صفر است. بیت دوم نشان می دهد که آیا سلول حس شده است یا خیر. بنابراین، اگر سلول حس نشود، بیت اشغال نادیده گرفته می شود. در نهایت، دو بیت باقی مانده برای بک ترک استفاده می شود. این دو بیت برای کدگذاری جهت، از چهار مورد ممکن، که ربات برای رسیدن به آن سلول گرفته است، استفاده می شود. این اطلاعات برای انجام بک ترک مورد نیاز است. با این وجود، نقشه نهایی فقط اطلاعات اشغال هر سلول را ثبت می کند، که فقط به یک بیت برای هر سلول نیاز دارد.
پاراگراف قبلی رفتار الگوریتم را در یک محیط ایده آل توضیح داد. با این حال، در یک پیاده سازی واقعی، الگوریتم باید به اندازه کافی قوی باشد تا بتواند شرایط غیرمنتظره را مدیریت کند. به ویژه، در این طرح، کیلومتر شماری ممکن است به داده های نادرست منجر شود. لغزش چرخ ها باعث می شود ربات کمتر از زاویه برنامه ریزی شده بچرخد یا مسافت کمتری را حرکت دهد. در نتیجه، موانع شناسایی شده ممکن است در موقعیت اشتباه قرار گیرند. برای رسیدگی به این خطاها از سیستم محلی سازی اولتراسونیک استفاده می شود. خطای موقعیت محاسبه می شود که تفاوت بین موقعیت مورد انتظار بر اساس کیلومتر شماری و موقعیت بر اساس سیستم اولتراسوند است. اگر از یک آستانه فراتر رفت، یک تغییر موقعیت انجام می شود. ربات انحراف زاویه بین موقعیت خود و موقعیتی که قرار بود در سلول قبلی باشد را محاسبه می کند.
4. آزمایشات
در این بخش آزمایشاتی ارائه می شود که با یک ربات واقعی انجام شده است. یک ربات برای آزمایش الگوریتم در شرایط واقعی طراحی شده است. آزمایشها شامل تست دقت حسگرهای مادون قرمز و تولید نقشهبرداری از محیطهای واقعی است.
4.1. معماری ربات موبایل
ابعاد ربات اجرا شده 16 سانتی متر × 15 سانتی متر × 18 سانتی متر است. تحرک ربات با استفاده از 2 موتور DC (GHM-04 از Lynxmotion) با گیربکس 30:1 به دست می آید و سرعت آنها با سیگنال های DPWM (مدولاسیون عرض پالس دیجیتال) کنترل می شود. محورهای موتور به چرخ هایی متصل می شوند که مسیرهای کاترپیلار را به حرکت در می آورند. موتورهای DC همچنین برای اهداف کیلومتر شماری به رمزگذارهای نوری متصل می شوند (انکودرهای نوری مربعی E4P-100-079-DHTB).
یک ساختار حسگر مادون قرمز در قسمت جلویی ربات در یک قطعه سفت قرار داده شده است که جهت هر سنسور را ثابت می کند. همانطور که در بخش 3.2 ارائه شد، سه حسگر IR رو به جلو و دو حسگر دیگر در دو طرف روبات وجود دارد. سنسورهای مادون قرمز رو به جلو شارپ 2Y0A21 هستند که یک خروجی آنالوگ متناسب با فاصله تا مانع ارائه می کنند. محدوده کاری این سنسورها از 10 تا 80 سانتی متر می باشد. سنسورهای IR جانبی شارپ 2D120X هستند که خروجی آنالوگ را نیز ارائه می دهند و برد آن بین 3 تا 35 سانتی متر است. خروجی سنسور مادون قرمز با یک ADC دیجیتالی می شود، به طوری که یک مدار دیجیتال، مانند یک ریزپردازنده، می تواند آن را مدیریت کند. در بالای ربات، در مرکز آن، یک گیرنده اولتراسونیک وجود دارد. این گیرنده توسط سیستم محلی سازی استفاده می شود که در بخش 3.3 توضیح داده شد. سیستم محلی سازی همچنین از یک گیرنده فرکانس رادیویی (FM-RRFQ2) برای همگام سازی فرستنده ها و گیرنده های اولتراسونیک استفاده می کند. ارتباط بی سیم بین ربات و کامپیوتر به لطف یک ماژول XBee انجام می شود که پروتکل استاندارد ZigBee را پیاده سازی می کند.
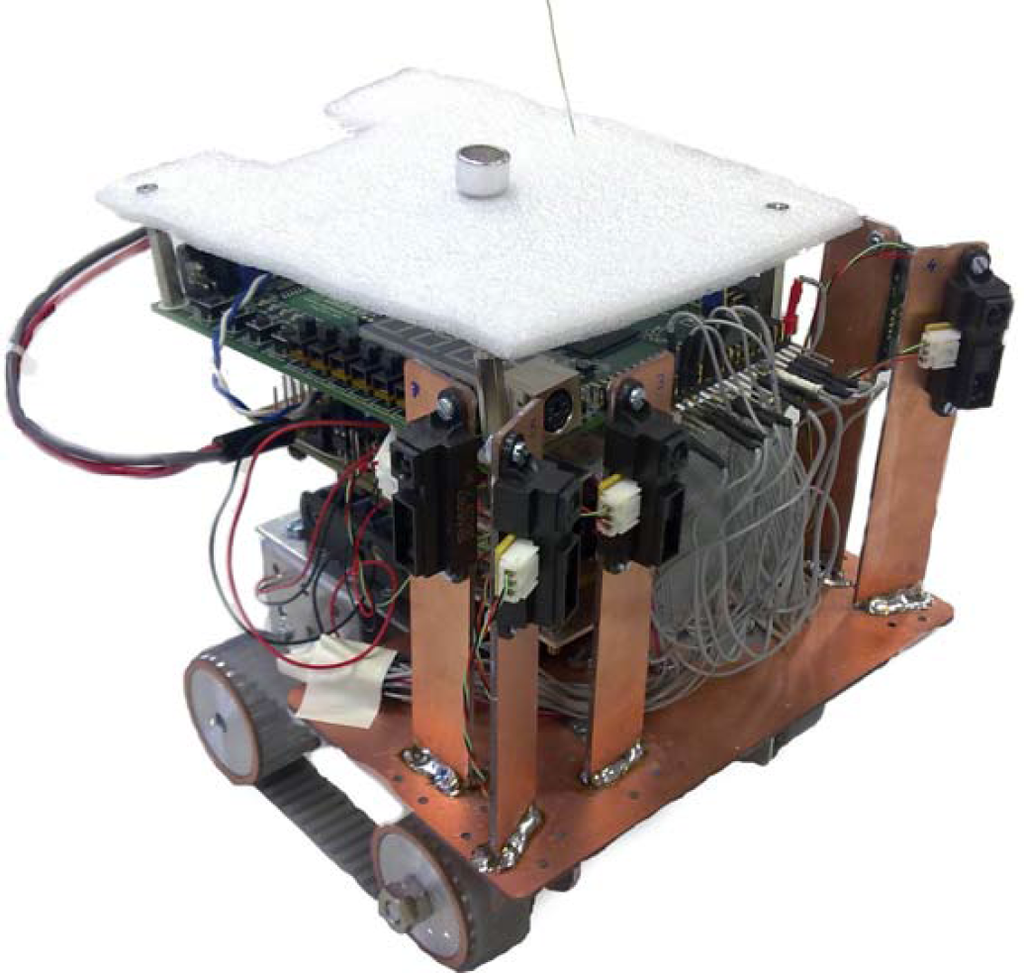
همه این عناصر به یک برد کمکی متصل می شوند که سطوح ولتاژ را به سطوح کاری FPGA تبدیل می کند. این برد کمکی همچنین شامل یک تنظیم کننده ولتاژ و یک مدار تقویتی و دیجیتالی دو مرحله ای متصل به گیرنده های اولتراسوند می باشد. کنترلر ربات در یک برد FPGA Xilinx Spartan3-1000 Starter پیاده سازی شده است. FPGA شامل یک پردازنده 32 بیتی Microblaze تعبیه شده است که الگوریتم نگاشت پیشنهادی را اجرا می کند که در بخش 3.4 شرح داده شده است. این پردازنده برای انجام وظایف کمکی مانند کنترل موتور، موقعیت یابی، رابط با ADC ها و ارتباطات بی سیم به چندین دستگاه جانبی متصل است. بنابراین، FPGA به فرد اجازه میدهد تا به طور موقت طراحی کندسخت افزار با زمان طراحی کوتاه، بنابراین برای نمونه سازی مناسب است. با این حال، پس از آزمایش، سیستم پیشنهادی را می توان در یک پردازنده سیگنال دیجیتال ارزان قیمت (DSP) یا میکروکنترلر پیاده سازی کرد. شکل 4 تصویری از ربات طراحی و پیاده سازی شده را نشان می دهد.
با توجه به منابع سخت افزاری مورد نیاز، FPGA از 3، 228 فلیپ فلاپ، 4، 581 جدول جستجوی 4 ورودی (LUTs)، سه ضرب کننده 18 بیتی استفاده می کند و تا حدی از رم داخلی 32 کیلوبایت و بخشی از رم خارجی 512 کیلوبایتی استفاده می کند. بنابراین، سیستم پیشنهادی در یک FPGA کمهزینه قرار میگیرد.
از طرفی پیاده سازی نرم افزار برای پیاده سازی الگوریتم BOBMapping به 165 کیلوبایت نیاز دارد. این برنامه همچنین برای ذخیره نقشه به فضای حافظه نیاز دارد و این فضا متناسب با اندازه شبکه است. همانطور که قبلاً گفته شد، هر سلول به چهار بیت برای نمایش در طول فرآیند نقشه برداری و یک بیت برای نمایش نقشه نیاز دارد. به منظور آسانتر کردن فهرستبندی آرایه بیتها، هر ردیف از شبکه به تعداد صحیح بایت نیاز دارد. به عنوان مثال، اگر سطرها دارای 11 سلول باشند، 44 بیت (5.5 بایت) برای ذخیره ردیف در طول فرآیند نقشه برداری مورد نیاز است، اما از شش بایت استفاده می شود. در آزمایشها از نقشه شبکهای 11×14 سلولی استفاده شده است، بنابراین 84 بایت در طول فرآیند نقشهبرداری و 28 بایت برای نمایش نقشه استفاده شده است.
4.2. محیط آزمایش
برای آزمایشات واقعی از اتاق آزمایشگاهی استفاده شده است. موانع با استفاده از موانع پلی استایرن منبسط شده شبیه سازی شده اند. برای این آزمایش ها از ربات پیاده سازی شده استفاده شد. همانطور که قبلا گفته شد، نقشه شبکه مورد استفاده در این آزمایش ها دارای 11 × 14 سلول است. با در نظر گرفتن اندازه ربات، طول ضلع سلول روی 22 سانتی متر تنظیم شده است. بنابراین آزمایشات واقعی در منطقه ای به ابعاد 242×308 سانتی متر انجام شد.
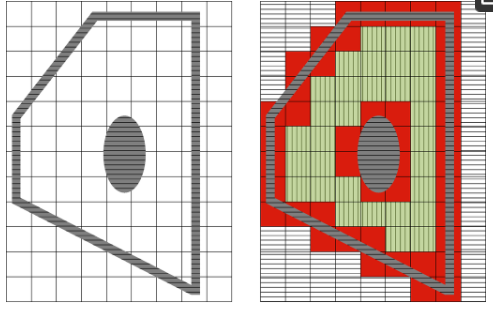
یک برنامه کاربردی برای نظارت بر فرآیند نقشه برداری انجام شده توسط ربات توسعه داده شده است ( شکل 5a ). این اپلیکیشن یک GUI (رابط کاربری گرافیکی) را برای نمایش مراحل ناوبری پیاده سازی می کند و همچنین سلول هایی را که توسط ربات حس شده است را نشان می دهد. این برنامه با ربات تعامل نمی کند، بلکه فقط یک شنونده است که اطلاعات را از طریق ماژول های ارتباطی ZigBee از ربات دریافت می کند. بنابراین، ربات کاملاً مستقل باقی می ماند.
شکل 5b تصویری از محیط واقعی است که در این آزمایش بررسی شده است. نتیجه برنامه نظارت بر روی تصویر قرار گرفته است.
4.3. نتایج تجربی
الگوریتم پیشنهادی به اطلاعات حسگرهای مادون قرمز و سیستم محلی سازی برای تنظیم وضعیت اشغال یک سلول اعتماد دارد. سیستم محلی سازی در [ 17 ] ارائه شد و دقت 3.3 سانتی متر را ارائه می کند. دقت فاصله تا موانع یک جزء کلیدی در این پیشنهاد است، زیرا از احتمال اشغال سلول استفاده نمیکند، بلکه از حالتهای باینری استفاده میکند: خالی یا اشغال شده. بنابراین، آزمایشهایی برای آزمایش دقت سنسورهای مادون قرمز، چه جلویی و چه جانبی، انجام شده است.
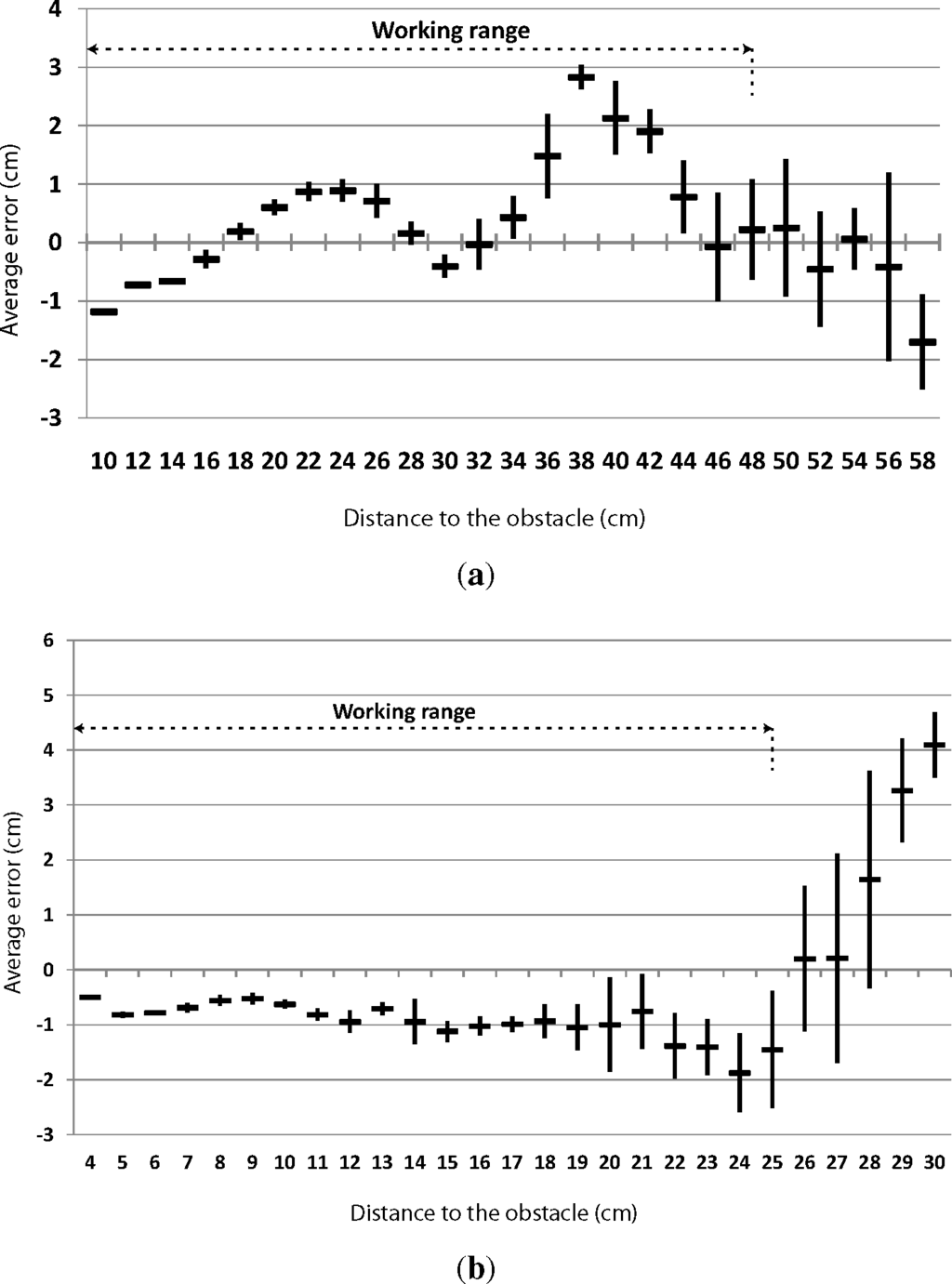
یک مانع در فواصل مختلف نسبت به سنسورها قرار داده شده است. هنگام تست سنسورهای جلو، مانع هر 2 سانتی متر بین 10 تا 58 سانتی متر قرار می گیرد. در مورد سنسورهای جانبی، مانع هر 1 سانتی متر بین چهار تا 30 سانتی متر قرار داده شده است. شکل 6a ,b نتایج آزمایشات انجام شده با حسگرهای جلویی و جانبی را به ترتیب نشان می دهد. ارقام میانگین خطا را با انحراف معیار آن نشان می دهد. همانطور که مشاهده می شود، با دورتر بودن مانع، دقت تخمین فاصله مانع کاهش می یابد.
محدوده مورد نیاز حسگرهای IR با طول سمت سلول نقشه، 22 سانتی متر در این آزمایش ها، و ملاحظات هندسی توضیح داده شده در بخش 3.2 تنظیم می شود. سنسورهای IR جلو برای تشخیص موانع از 10 تا 48 سانتی متر استفاده می شود. حداقل فاصله تشخیص مانع توسط سنسور شارپ 2D120X IR 10 سانتی متر است. حداکثر فاصله مورد نیاز حسگرهای k و m (نگاه کنید به شکل 3 ) 48 سانتی متر است، زمانی که طول ضلع سلول 22 سانتی متر است و ربات در مرکز سلول فعلی خود قرار دارد. همانطور که شکل 6aنشان می دهد که حداکثر خطای متوسط بین 10 تا 48 سانتی متر زیر 3 سانتی متر است. بنابراین، تخمین فاصله مانع کاملاً دقیق است. سنسورهای جانبی برای تشخیص موانع از 4 تا 25 سانتی متر استفاده می شود. حداقل فاصله تشخیص مانع توسط سنسور شارپ 2Y0A21 IR 4 سانتی متر است. علاوه بر این، 25 سانتیمتر حداکثر فاصله لازم برای حس کردن سلول جانبی همسایه است، با در نظر گرفتن اینکه طول ضلع سلول 22 سانتیمتر است و ربات در مرکز سلول فعلی خود قرار دارد. با در نظر گرفتن این محدوده (چهار تا 25 سانتی متر)، حداکثر میانگین خطای سنسورهای جانبی 2 سانتی متر است. بنابراین، سنسورهای جانبی نیز کاملا دقیق هستند.
همانطور که در شکل 5 نشان داده شده است، پس از آزمایش حسگرهای مادون قرمز، آزمایش های نقشه برداری با ربات انجام شده است.
در آزمایش های نقشه برداری، 10 پیکربندی فضایی تنظیم شده است و به ربات دستور داده شده تا محیط خود را نقشه برداری کند. برخی از پیکربندی ها، نقشه های فضای بسته هستند، که در آن تمام فضا توسط موانع محدود شده است. علاوه بر این، پیکربندیهای فضای باز نقشهبرداری شدهاند که در آن محدودیت فضا با اندازه شبکه محدود میشود. جدول 1 نتایج آزمایش را نشان می دهد. همانطور که در بخش 3.4 توضیح داده شد، ربات میتواند سلولی را که قبلاً حس کرده بود، در هنگام حرکت دوباره حس کند، بنابراین این اطلاعات به تفصیل در جدول آمده است. این جدول همچنین دقت نقشه برداری و تعداد سلول هایی را که ربات باید حرکت دهد تا محیط را ترسیم کند و همچنین تعداد دورهای ربات در طول این فرآیند را نشان می دهد.
توجه به این نکته مهم است که تمام خطاها در فرآیند نگاشت در مرزهای بین سلول های خالی و اشغال شده به وجود آمده است، به خصوص زمانی که یک مانع در مرز بین سلول ها قرار داشته باشد. تکنیک سنجش مجدد که قبلاً توضیح داده شد به شخص اجازه می دهد تا تعداد خطاها را در فرآیند نقشه برداری کاهش دهد، در حالی که زمان نگاشت را افزایش نمی دهد. در این آزمایشها، 20 خطا هنگام نقشهبرداری به وجود آمد، اما با استفاده از فرآیند سنجش مجدد، خطاها به 6 کاهش یافت. همانطور که در بخش 3.2 توضیح داده شد، فرآیند نگاشت امکان طبقه بندی یک سلول اشغال شده به عنوان خالی را به حداقل می رساند. تمام خطاهای جدول 1 سلول های خالی هستند که به عنوان سلول های اشغال شده نگاشت شده اند. بنابراین، یک ربات متحرک به دلیل خطاهای نقشه برداری با مانع برخورد نمی کند.
در نهایت، جدول 1 طول مسیر را که بر حسب تعداد سلول های پوشش داده شده توسط ربات و تعداد چرخش ها آورده شده است را نشان می دهد. نتایج نشان میدهد که بهطور متوسط، ربات باید به طور متوسط ۶۸ درصد از سلولها را برای تکمیل نقشه نهایی، از جمله حرکات عقبگرد، بازدید کند. این درصد زیاد مربوط به محدوده حسگر پایین است. افزایش مورد نیاز دقت حسگر، روند نگاشت را در مقایسه با راه حل هایی با دامنه سنجش وسیع تر کند می کند.
میانگین میزان موفقیت آزمایش های نقشه برداری 99.42 درصد است، بنابراین نقشه های تولید شده بسیار شبیه به محیط های واقعی هستند. بنابراین، این نقشه ها برای استفاده در ناوبری بدون کمک ربات های داخلی مناسب هستند.
5. بحث
ما در بخش 2 آخرین وضعیت فعلی مربوط به ساخت نقشه را ارائه کردیم. در این مرحله از مقاله، مقایسه با رویکردهای مشابه مورد نیاز است. این بخش روی دو نکته اصلی تمرکز خواهد کرد: هزینه سیستم و الگوریتم نقشه برداری.
کارهای مختلف الزامات کم هزینه را در طراحی خود لحاظ کرده اند. مگنات و همکاران [ 23 ] با استفاده از یک حسگر چرخشی مادون قرمز، نقشه های شبکه اشغال را ایجاد می کند. اگرچه قیمت کامل این ربات گزارش نشده است، اما فقط واحد سنسور چرخشی 390 دلار قیمت دارد. گیفورد و همکاران [ 24] یک ربات نقشه برداری مستقل با استفاده از حسگرهای IR ایجاد کرد. قیمت گزارش شده هر واحد 1250 دلار است. هزینه سیستم ارائه شده در این مقاله 550 دلار است، شامل قیمت دو FPGA مورد نیاز (یکی برای ربات و دیگری برای سیستم چراغ اولتراسونیک). هر یک از این FPGA ها حدود 130 دلار قیمت دارند. با این حال، FPGA های ارزان تر نیز برای پروژه معتبر هستند. علاوه بر این، بیکن های ساطع کننده را می توان با استفاده از یک میکروکنترلر کنترل کرد که ارزان تر از FPGA است، زیرا تمام پردازش های محلی سازی در گره گیرنده انجام می شود.
الگوریتم اکتشاف فضا به شدت به محدوده حسگر و استفاده از نقشه اکتشاف شده از قبل وابسته است. زمانی که ربات بتواند یک ناحیه شعاع سلولی چندگانه را حس کند و از نقشه کاوش شده استفاده کند، انتخاب موقعیت بعدی برای انجام جستجوی سلولی ناشناخته در رویکردهای زیر قرار می گیرد. در [ 25 ]، استراتژی Next-Best-View استفاده شده است: بهترین نامزد برای جستجوی جدید موقعیتی است که امکان جمع آوری اطلاعات بیشتر را فراهم می کند. تبدیل فاصله در [ 26 ] استفاده می شود. در این الگوریتم بهترین نامزد نزدیکترین موقعیت ناشناخته است. در نهایت، الگوریتم در [ 27] برای هر نامزد امکان جمع آوری اطلاعات و فاصله تا موقعیت فعلی را در نظر می گیرد. هنگامی که نقشه از قبل کاوش شده در نظر گرفته نمی شود، پیشنهادهای مختلفی برای کاوش نقشه وجود دارد: در [ 28 ] مسیرهای مختلف (Seedspreader، Concentric، FigureEight، Random، Triangle و Star) در نظر گرفته شده و ارزیابی می شود. دو استراتژی پیروی از دیوار در [ 29 ] ارائه شده است، و نتایج استفاده از مسیرهای تصادفی در [ 30 ] مورد بحث قرار گرفته است.
در رویکرد BOBMapping، در مرحله کاوش رو به جلو، الگوریتم بر اساس الگوریتم ترمو است. همانطور که قبلا ارائه شد، سه سلول برای هر موقعیت کاملاً حس می شود. این اطلاعات در الگوریتم Trémaux گنجانده شده است تا سلول بعدی را برای بازدید انتخاب کنید. با توجه به محدوده سنجش کم، مسیر نقشه برداری نهایی ربات بسیار شبیه به راه حل پایه ترمو است. علاوه بر این، رویکرد ما از اطلاعات نقشه کاوش شده در هنگام عقب نشینی استفاده می کند و مسافت طی شده را کاهش می دهد.
با بهترین دانش نویسندگان، رویکرد BOBMapping یکی از ارزانترین الگوریتمهای نقشهبرداری است. الگوریتم پیشنهادی نیز یکی از کندترین راه حل ها در مقایسه با [ 25-27 ] است . با این حال، توجه به این نکته مهم است که فرآیند نقشه برداری تنها یک بار انجام می شود، بنابراین زمان نگاشت نباید حیاتی باشد.
6. نتیجه گیری
این مقاله BOBMapping را توصیف می کند، که یک رویکرد نقشه برداری است که برای استفاده توسط روبات های کم هزینه طراحی شده است. پیشنهاد ارائه شده بر اساس سیستم های نقشه برداری شبکه اشغال ساده شده است که برای دستگاه های کم هزینه بهینه شده است. سلول های نقشه ها با یک حالت باینری، کاملا خالی یا به طور جزئی/کاملا اشغال شده نشان داده می شوند، بنابراین هیچ احتمالی در وضعیت سلول وجود ندارد. به این ترتیب منابع مورد نیاز (حافظه و پیچیدگی الگوریتم) سیستم کاهش می یابد. این طراحی به این دلیل است که ربات دارای اندازه سلولی مشابه و هولونومی است. این مقاله یک توزیع هندسی بهینه از سنسورهای IR خطی را برای اسکن کامل ناحیه چندین سلول در یک تکرار پیشنهاد میکند.
الگوریتم اکتشاف فضا بر اساس الگوریتم ترمو است. در این رویکرد، ربات سلول های همسایه متعامد خود را کاوش می کند و اطلاعات مورد نیاز را برای ردیابی مسیر خود ذخیره می کند. هنگامی که ربات به سلولی می رسد که در آن همه همسایگانش سلول غیر قابل تشخیصی ندارند، با اطلاعات ناوبری که قبلاً ذخیره شده است، به عقب برمی گردد. رویکرد کاوش عملکرد کمتری را نسبت به الگوریتمهای نقشهبرداری نشان میدهد که از اطلاعات قبلاً کاوششده برای تصمیمگیری مسیر نقشهبرداری استفاده میکنند. این تفاوت بر اساس محدوده حسی کوتاهتر، هرچند دقیقتر ما است. با این حال، راه حل پیشنهادی آن دسته از رویکردهای نقشه برداری را بهبود می بخشد که فضای قبلا کاوش شده را نادیده می گیرند.
این پیاده سازی با یک ربات واقعی آزمایش شده است که از حسگرهای IR برای تشخیص موانع استفاده می کند. سیستم محلی سازی دقت 3.3 سانتی متر را ارائه می دهد. آزمایش های دقت سنسورهای مادون قرمز انجام شده است که نشان می دهد خطا در تمام محدوده های اندازه گیری کمتر از 3 سانتی متر باقی می ماند. علاوه بر این، آزمایش های نقشه برداری با میزان موفقیت 99.42 درصد در محیط های واقعی انجام شده است. از این رو، الگوریتم BOBMapping قابلیت اطمینان خود را در ایجاد نقشه های شبکه اشغال نشان داده است.
منابع
- چن، سی. Cheng, Y. تحقیق در مورد نقشهسازی توسط روباتهای متحرک، مجموعه مقالات دومین سمپوزیوم بینالمللی کاربرد فناوری اطلاعات هوشمند (IITA ’08)، شانگهای، چین، 20-22 دسامبر 2008. 2، ص 673-677.
- Yamauchi, B. A Frontier-based Approach for Autonomous Exploration, مجموعه مقالات سمپوزیوم بین المللی IEEE 1997 در زمینه هوش محاسباتی در رباتیک و اتوماسیون (CIRA’97)، مونتری، کالیفرنیا، ایالات متحده آمریکا، 10-11 ژوئیه 1997. صص 146-151.
- Stachniss, C. نقشه برداری و اکتشاف رباتیک ; Springer: برلین، آلمان، 2009. [ Google Scholar ]
- وان، آر. استوی، ک. سوخاتمه، جی. Mataric، M. LOST: مسیرهای محلی سازی فضایی برای تیم های ربات. IEEE Trans. ربات. خودکار 2002 ، 18 ، 796-812. [ Google Scholar ]
- آرلئو، آ. دل آر. میلان، جی. Floreano، D. یادگیری کارآمد نقشه های شناختی با وضوح متغیر برای ناوبری مستقل در داخل ساختمان. IEEE Trans. ربات. خودکار 1999 ، 15 ، 990-1000. [ Google Scholar ]
- کوستا، اف. Ollero، A. فصل 4 کنترل هوشمند ربات های متحرک با ادراک فازی. در ناوبری ربات موبایل هوشمند ; Springer: برلین، آلمان، 2005; صص 79-122. [ Google Scholar ]
- ناگلا، ک. الدین، م. Singh, D. بهبود نقشهبرداری شبکه اشغال در محیطهای specular. ربات. Auton. سیستم 2012 ، 60 ، 1245-1252. [ Google Scholar ]
- لوپز-سانچز، م. استوا، اف. لوپز دی مانتاراس، آر. سیرا، سی. تولید نقشه Amat، J. توسط روباتهای کمهزینه مشارکتی در محیطهای ناشناخته ساختاریافته. Auton. ربات. 1998 ، 5 ، 53-61. [ Google Scholar ]
- Bräunl, T. Embedded Robotics: طراحی ربات موبایل و برنامه های کاربردی با سیستم های جاسازی شده . Springer-Verlag-Berlin: هایدلبرگ، آلمان، 2008. [ Google Scholar ]
- انوساکی، جی. کیریاکوپولوس، ک. مکانیابی و ساخت نقشه همزمان رباتهای هدایتشونده. ربات IEEE. خودکار Mag. 2007 ، 14 ، 79-89. [ Google Scholar ]
- کاستلانوس، جی. Tardós، JD Mobile Robot Localization and Map Building a Multisensor Fusion Approach . Springer: برلین، آلمان، 2000. [ Google Scholar ]
- وازکوئز-مارتین، آر. نونز، پ. Bandera، A. کمتر نقشه برداری: تقسیم بندی محیط آنلاین بر اساس نقشه برداری طیفی. ربات. Auton. سیستم 2012 ، 60 ، 41-54. [ Google Scholar ]
- کیم، جی. کواک، ن. لی، بی. سنجش محدوده فعال کم هزینه با استفاده از صفحه نور هالوژن برای ساختمان نقشه شبکه اشغال، مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2005 در مورد ربات ها و سیستم های هوشمند (IROS 2005)، ادمونتون، AB، کانادا، 2-6 آگوست 2005; ص 1612-1617.
- چوی، YH; اوه، نقشه SY از طریق تطبیق اسکن شبه متراکم با استفاده از دادههای سونار بصری ساخته شد. Auton. ربات. 2007 ، 23 ، 293-304. [ Google Scholar ]
- امبارکار، ا. سوبرامانیان، وی. Doboli، A. بومی سازی مبتنی بر صدا کم هزینه با استفاده از سیستم های سیگنال مخلوط قابل برنامه ریزی روی تراشه. میکروالکترون. J 2011 ، 42 ، 382-395. [ Google Scholar ]
- سانچز، آ. الویرا، اس. د کاسترو، آ. گلز دی ریورا، جی. ریبالدا، آر. Garrido, J. موقعیت یابی التراسونیک داخلی کم هزینه اجرا شده در FPGA، مجموعه مقالات سی و پنجمین کنفرانس سالانه IEEE Industrial Electronics (IECON ’09)، پورتو، پرتغال، 3-6 نوامبر 2009. صص 2709-2714.
- سانچز، آ. د کاسترو، آ. گلز دی ریورا، جی. الویرا، اس. Garrido, J. سیستم موقعیت یابی اولتراسونیک داخلی مستقل بر اساس مدار تهویه مطبوع کم هزینه. اندازه گیری 2012 ، 45 ، 276-283. [ Google Scholar ]
- بیرک، ا. Carpin, S. ادغام نقشههای شبکه اشغال از چندین روبات. IEEE Proc. 2006 ، 94 ، 1384–1397. [ Google Scholar ]
- Elfes, A. استفاده از شبکههای اشغال برای درک و ناوبری ربات متحرک. کامپیوتر 1989 ، 22 ، 46-57. [ Google Scholar ]
- پالا، م. اوسطی عراقی، ن. لوپز-کولینو، اف. سانچز، آ. د کاسترو، آ. Garrido، J. HCTNav: یک الگوریتم برنامه ریزی مسیر برای ناوبری ربات خودمختار کم هزینه در محیط های داخلی. ISPRS Int. J. Geo-Inf. 2013 ، 2 ، 729-748. [ Google Scholar ]
- کویگلی، ام. گرکی، بی. کانلی، ک. فاوست، جی. فوت، تی. لیبز، جی. برگر، ای. ویلر، آر. Ng، A. ROS: یک سیستم عامل روبات منبع باز، مجموعه مقالات کارگاه نرم افزار منبع باز کنفرانس بین المللی رباتیک و اتوماسیون (ICRA)، کوبه، ژاپن، 12-17 مه 2009.
- حتی، الگوریتم های نمودار S. انتشارات دانشگاه کمبریج: کمبریج، بریتانیا، 2011. [ Google Scholar ]
- مگنات، اس. لانگ چمپ، وی. بنانی، م. رتورناز، پ. ژرمانو، پی. بلولر، اچ. Mondada، F. SLAM مقرون به صرفه از طریق طراحی مشترک سخت افزار و روش، مجموعه مقالات کنفرانس بین المللی IEEE در سال 2010 در مورد رباتیک و اتوماسیون (ICRA)، انکوریج، AK، ایالات متحده، 3-7 مه 2010. صص 5395–5401.
- گیفورد، سی. وب، آر. بلی، جی. لئونگ، دی. کالن، ام. ماکارویچ، جی. بنز، بی. آگاه، الف. کاوش و نقشه برداری چند روباتی کم هزینه، مجموعه مقالات کنفرانس بین المللی IEEE در زمینه فناوری ها برای کاربردهای کاربردی روبات (TePRA 2008)، Woburn، MA، ایالات متحده آمریکا، 23-24 آوریل 2008; صص 74-79.
- گونزالس-بانوس، اچ. استراتژی های ناوبری Latombe، JC برای کاوش در محیط های داخلی. بین المللی ربات جی. Res. 2002 ، 21 ، 829-848. [ Google Scholar ]
- تیلور، تی. گوا، اس. Boles, W. Directed Exploration Using a Modified Distance Transform, Proceedings of the 2005 Digital Image Computing: Techniques and Applications (DICTA ’05), Cairns, استرالیا, 6-8 دسامبر 2005. صص 53-53.
- آمیگونی، ف. Caglioti, V. یک استراتژی اکتشافی مبتنی بر اطلاعات برای نقشهبرداری محیط با روباتهای متحرک. ربات. Auton. سیستم 2010 ، 58 ، 684-699. [ Google Scholar ]
- سیم، آر. دودک، جی. استراتژیهای اکتشاف مؤثر برای ساخت نقشههای بصری، مجموعه مقالات کنفرانس بینالمللی IEEE/RSJ 2003 در مورد رباتها و سیستمهای هوشمند (IROS 2003)، لاسوگاس، NV، ایالات متحده، 27-31 اکتبر 2003. 4، صص 3224-3231.
- لی، دی. Recce، M. ارزیابی کمی از استراتژی های اکتشاف یک ربات متحرک. بین المللی ربات جی. Res. 1997 ، 16 ، 413-447. [ Google Scholar ]
- فردا، ال. Oriolo، G. استراتژی های احتمالی مبتنی بر مرز برای کاوش مبتنی بر حسگر، مجموعه مقالات کنفرانس بین المللی IEEE در سال 2005 در مورد رباتیک و اتوماسیون (ICRA 2005)، بارسلونا، اسپانیا، 18-22 آوریل 2005. صص 3881-3887.




© 2013 توسط نویسندگان; دارنده مجوز MDPI، بازل، سوئیس این مقاله یک مقاله با دسترسی آزاد است که تحت شرایط و ضوابط مجوز Creative Commons Attribution (http://creativecommons.org/licenses/by/3.0/) توزیع شده است.
بدون نظر